用于运行运输装置的方法和运输装置
文献发布时间:2023-06-19 13:49:36
本申请是申请号为201810682646.0、申请日为2018年6月28日、名称为“用于运行呈长定子线性马达形式的运输装置的方法”的发明专利申请的分案申请。
技术领域
本发明涉及一种用于运行呈长定子线性马达形式的运输装置的方法,在该方法中,使运输单元沿着长定子线性马达的运输路段运动,其中,在两侧设置在运输单元的基体上的驱动磁体至少在转送位置的区域中与运输路段的两个路段部段的驱动线圈配合作用,以产生驱动力,所述转送位置设置在所述对置的路段部段之间以便转送运输单元,其中,运输单元的驱动磁体和长定子线性马达的运输路段的驱动线圈是磁回路的磁压源,所述磁回路至少在转送位置的区域中在运输单元两侧构成,其中,运输单元在转送位置中在所述对置的路段部段之间转送,方式为,在运输单元沿着运输路段运动期间在转送位置的区域中在运输单元的至少一侧上改变在所述至少一侧的磁回路中的磁通量,以便产生作用到运输单元上的侧向力。此外,本发明涉及一种呈长定子线性马达形式的运输装置,所述运输装置具有至少一个运输单元和至少一个运输路段。
背景技术
在几乎所有现代化生产设施中需要使构件或部件也在较长的运输路段上借助运输装置在各个处理站或生产站之间运动。对此已知多种运输装置或输送装置。通常为此使用呈不同实施方案的连续输送机。常规的连续输送机是呈不同实施方案的输送带,在所述输送带中将电驱动装置的旋转运动转换成输送带的线性运动。对于这种常规的连续输送机,在灵活性方面受到相当大的限制,尤其是各个运输单元的个体运输是不可行的。为了进行弥补并且为了满足现代化的灵活的运输装置的要求,越来越多地使用所谓的长定子线性马达(LLM)作为常规的连续输送机的替代品。
在长定子线性马达中,形成定子的多个电驱动线圈沿着运输路段位置固定地并排设置。在运输单元上设置有多个驱动磁体,所述驱动磁体要么作为永磁体要么作为电线圈或短路绕组,它们与驱动线圈配合作用。通过驱动磁体的和驱动线圈的(电)磁场的配合作用,将驱动力作用于所述运输单元,所述驱动力使所述运输单元向前运动。所述长定子线性马达能够构成为同步电机(既能够构成为是自激励的也能够构成为是外部激励的)或者构成为异步电机。通过操控各个驱动线圈以调节磁通量,驱动力的大小受到影响,并且所述运输单元能够以期望的方式沿着运输路段运动。在此也可行的是,沿着运输路段设置多个运输单元,所述运输单元的运动能够单独地或彼此无关地受到控制,其方式为:将分别与运输单元配合作用的驱动线圈通电,通常通过施加电压进行。长定子线性马达的特征尤其在于在运动的整个工作范围上(位置、速度、加速度)更好且更灵活的使用、运输单元的沿着运输路段的个体的调节/控制、改进的能量使用、由于较小数量的磨损部件导致的维护成本减小、运输单元的简单更换、有效的监控和故障检测以及沿着运输路段的产品流的优化。这种长定子线性马达的示例能够从WO 2013/143783 A1、US 6,876,107 B2、US 2013/0074724A1或WO 2004/103792 A1中得出。
长定子线性马达对运输单元的运动的调节提出高的要求。为此沿着运输路段通常设置有多个调节器,所述调节器调节所述驱动线圈的定子电流,以便使所述运输单元如规定那样沿着运输路段运动。对于运输单元的运动必要的是,单独地调节每个驱动线圈,以便确保运输单元沿着运输路段的流畅的、受控的和稳定的运动。运输单元的当前位置能够通过适宜的传感器检测并且提供给调节器,所述传感器也能够沿着运输路段设置。但是多个运输单元在运输路段上运动,因此通过不同的驱动线圈移动不同的运输单元。但是沿着运输路段运动的运输单元能够在其特性方面进行区分。例如,运输单元能够不同地被加载、具有不同的磨损状态、由于制造方面的缺陷而引起不同的引导力、引起不同的摩擦力等。同样可设想的是,具有不同设计或不同结构大小的运输单元沿着运输路段运动。但是,所有这些因素影响对运输单元的运动的调节。
在此,在长定子线性马达中特别重要的是运输单元的驱动磁体与运输路段的驱动线圈的配合作用,它们通过间隙或所谓的气隙彼此间隔开。运输单元的驱动磁体和运输路段的驱动线圈是磁压源并且构成共同的磁回路。除了磁压,磁回路还通过磁阻来确定,所述磁阻决定性地通过气隙或尤其是通过间隙大小和通过间隙中空气的磁导率来确定。由磁压源产生的磁压的强度以及磁回路的磁阻的大小直接确定长定子线性马达的电磁特性、尤其是磁回路的磁通量。在此,已经能够引起磁性参量的小的改变,例如基于运输单元的错误引导或磨损引起的气隙大小改变而引起的磁阻改变。气隙的大小通常通过长定子线性马达的结构固定地预设,例如通过长定子线性马达的结构设计来预设,并且在运行时优选不发生改变。气隙中的空气的磁导率是恒定的物理参量。驱动磁体的磁压通常固定地预设,因为所述驱动磁体通常构成为永磁体,并且在运输装置运行期间不可变。驱动线圈的磁压通过施加到驱动线圈上的电压来限定,其强度通常由运输装置的调节单元来确定。
文献DE 10 2014 118 335 A1描述一种工具机的线性驱动单元,其具有用于改变位于磁体和线圈之间的磁隙的大小量级的磁隙改变机构,以调整在推力和线性驱动单元的极点冲击之间的平衡。在此,在高度精确的加工过程的范围中增大气隙,以便减小通量密度进而同时也减小极点冲击。在要求低精度但是高负载的加工范围中缩小气隙。这增大了通量密度进而增大了驱动力,但是也增大了极点冲击。在DE10 2014 118 335 A1中,气隙的调节因此用于减小对于线性驱动单元运动部件的高度精确定位而言的极点冲击。对于不那么精确的加工,选择具有缩小的气隙的其它模式。模式的选择通过工具机的操作者进行,并且在运行期间不改变模式。这对于工具机的线性驱动单元是有意义的,但是对于具有长定子线性马达的运输系统不那么有意义。因此在长定子线性马达中,通常通过设计措施、例如在构造定子的叠片组时的设计措施减少可能的极点冲击。
而对于运输应用通常期望的是,运输单元的速度能够在大的范围中灵活地调节。在运输应用中通常存在如下路段部段,在所述路段部段处运输单元能以高速运动,例如空的运输单元在闭合的运输路段中的返回区域。在此既不取决于精度,也不取决于影响,例如极点冲击。在其它路段部段中通常要求维持精确的速度或者要求用于移动高负载的高驱动力。长定子线性马达的驱动线圈由功率电子单元单独地通电,其方式为,功率电子单元对功率线圈施加由调节装置预设的线圈电压。功率电子单元当然设计为最大电流或最大电压,借此在长定子线性马达的给定的设计结构中也预设运输单元的可实现的驱动力和可达到的速度。因此,对于大的速度范围,功率电子单元以及驱动线圈必须相应有效地设计。在长定子线性马达的驱动线圈和功率电子单元数量大的情况下,这当然与高的耗费和成本相关联进而通常是不期望的。
在旋转电动马达中已知所谓的弱磁运行,以便提高电动马达的转速。在此,电动马达的驱动线圈基本上如此通电,使得产生电磁反磁场,所述电磁反磁场削弱电动马达的驱动磁体的磁场。所述反磁场当然必须与电磁体的转子同步,这对调节提出高的要求。除此以外,用于维持所述反磁场的所需的电能表示纯损耗,这仅由于出自热量原因的损耗功率就已经是不利的。附加地,功率电子设备必须具有相应的功率储备,以便能够施加对于反磁场所需的电功率。但是这直接表示为用于功率电子设备的较高耗费进而还有较高成本。现在,长定子线性马达也可能在弱磁运行中运行,但是这在该情况下可能是更不利的,因为与旋转电动马达相比存在更多的驱动线圈。
发明内容
因此,本发明的目的是,能实现一种在呈长定子线性马达形式的运输装置的转送位置中转送运输单元的替选可能性,而无需改变所述运输装置的能量边界条件(功率电子单元的最大电流或最大电压)。
按照本发明,所述目的如下实现:用于运行呈长定子线性马达形式的运输装置的方法,在该方法中,使运输单元沿着长定子线性马达的运输路段运动,其中,在两侧设置在运输单元的基体上的驱动磁体至少在转送位置的区域中与运输路段的两个路段部段的驱动线圈配合作用,以产生驱动力,所述转送位置设置在所述对置的路段部段之间以便转送运输单元,其中,运输单元的驱动磁体和长定子线性马达的运输路段的驱动线圈是磁回路的磁压源,所述磁回路至少在转送位置的区域中在运输单元两侧构成,其中,运输单元在转送位置中在所述对置的路段部段之间转送,方式为,在运输单元沿着运输路段运动期间在转送位置的区域中在运输单元的至少一侧上改变在所述至少一侧的磁回路中的磁通量,以便产生作用到运输单元上的侧向力,其特征在于,改变所述磁通量,方式为,改变磁回路的磁阻和/或在运输单元上改变磁回路的磁压。。
因为用于移动运输单元的长定子线性马达的各个驱动线圈的驱动电流的调节总归已经是极其耗费的,所以提供一种偏转解决方案的良好可能性,而不会干预驱动线圈的调节,尤其是不会干预所实施的调节器。因此改变长定子线性马达的调节路段,而不是改变调节或调节器。由此相对于运输单元的一侧来改变另一侧的磁通量,由此可以将运输单元在运输路段的转送位置上沿期望的方向转向,因为由运输单元的两侧磁通量的差在线圈电压保持不变的情况下在两侧上导致不同的磁侧向力。运输单元由此向一侧以较高的侧向力转向,该较高的侧向力由较大的磁通量得到。
有利地,为了改变磁回路的磁阻,借助于至少一个设置在运输单元上的并且与运输单元的所述至少一个驱动磁体配合作用的第一调整机构在至少一个运动自由度上改变运输单元的至少一个驱动磁体的位置。通过改变至少一个驱动磁体的位置,能够有针对性地影响磁阻,以便改变磁回路的磁通量。在此,所述至少一个运动自由度可以是平移或旋转。
优选地,为了改变磁回路的磁阻,借助于至少一个设置在运输路段上的并且与运输路段的所述至少一个驱动线圈配合作用的第二调整机构在至少一个运动自由度上改变运输路段的至少一个驱动线圈的位置。因此,磁回路的在运输单元运动期间的磁阻改变能够在定子侧进行。
有利的是,为了改变磁回路的磁阻,借助于至少一个设置在运输单元上或设置在运输路段上的第三调整机构将具有确定的磁导率的至少一个磁阻元件引入气隙中,所述气隙位于运输单元的至少一个驱动磁体和运输路段的至少一个与驱动磁体配合作用的驱动线圈之间。由此提供另一可能性,在运输单元运动期间有针对性地影响磁阻进而影响磁回路中的磁通量。
根据本发明的另一有利的设计方案,为了改变磁回路的磁阻,借助于至少一个设置在运输路段上的第四调整机构将具有确定的磁导率的至少一个磁阻元件引入设置在运输路段上的开口中。由此,能够在定子侧改变磁阻进而改变磁通量,而不必进入气隙中。
有利地,为了改变运输单元的驱动磁体的磁压,在运输单元上设置至少一个附加线圈,其中,为了至少暂时地增加或减小运输单元上的磁压,将附加电压至少暂时地施加到附加线圈上,以便因此产生与驱动磁体的磁压相同或相反方向的附加磁压,由此增大或减小磁通量。因此,提供一种改变磁回路的磁通量的可能性,而不必改变运输装置的各个部件(例如驱动磁体、驱动线圈)的位置。
如果确定了磁回路中的实际磁通量,并且调节单元将实际磁通量调节为限定的期望磁通量,其方式为,由调节单元改变运输单元上的磁阻和/或磁压,那么提供一种用于补偿运输路段的引导精度的可能性,其方式为,将气隙中的磁通量调节为恒定值。
有利的是,在运输单元的至少一侧上改变相应的该侧的运输单元上的磁阻和/或磁压,以便产生作用到运输单元上的侧向力。因此运输单元的一侧的磁通量相对于另一侧发生变化,由此可以使运输单元在运输路段的转送位置上转向期望的方向,这是因为在两侧上的线圈电压保持不变的情况下由运输单元的两侧的磁通量的差值得出不同的侧向磁力。由此,运输单元偏转到具有较高侧向力的侧上,所述较高侧向力由较高的磁通量得出。
优选地,减小磁回路的磁通量,其方式为:改变在运输单元上的磁阻和/或磁压。由此可行的是,提高运输单元的最大可实现的速度,而在此无需改变电边界条件。在给定线圈电压或给定线圈电流的情况下,能够产生特定的驱动力,所述驱动力使运输单元向前运动。但是,通过运输单元的运动,以已知的方式通过运动的运输单元的驱动磁体的磁场在驱动线圈中感应产生电压,所述电压也称为反向EMK(电动力),并且所述反向EMK反作用于所施加的线圈电压。EMK电压限制运输单元的可达到的最大速度,这是因为所感应产生的电压反作用于线圈电压进而限制驱动线圈的可能的电流消耗。通过减小磁通量,在保持线圈电压的情况下能够提高运输单元的可实现的最高速度,这是因为基于减小的磁通量而能够减小所感应产生的EMK电压。
本发明的目的还通过呈长定子线性马达形式的运输装置来实现,其具有至少一个运输单元和至少一个运输路段,在该运输路段上在两个对置的路段部段之间设有转送位置,以便转送运输单元,其中,运输单元具有基体,在基体的两侧上设置有驱动磁体,以便至少在转送位置的区域中与在路段部段两侧设置的驱动线圈配合作用,以产生驱动力,运输单元的驱动磁体和运输路段的驱动线圈是磁回路的磁压源,所述磁回路至少在转送位置的区域中在运输单元两侧构成,其特征在于,在运输装置上设有调整装置和/或在运输单元上设有附加线圈,以便至少在转送位置的区域中在运输单元的至少一侧上改变在所述至少一侧的磁回路中的磁通量,从而产生作用到运输单元上的侧向力,由此运输单元在转送位置中在运输路段的所述对置的路段部段之间转送,其中,所述调整装置设置成,用于改变磁回路的磁阻,并且所述附加线圈设置成,用于改变磁回路的磁压。
附图说明
下面参考图1至7详细阐述本发明,所述附图示例性地、示意性地并且非限制性地示出本发明的有利的设计方案。在此示出:
图1示出呈长定子线性马达形式的运输装置的设计方案;
图2a示出具有可调整的驱动磁体的运输单元的俯视图,所述运输单元在运输路段的笔直的路段部段上;
图2b和2c分别示出具有可调整的驱动磁体的运输单元的俯视图,所述运输单元在运输路段的弯曲的路段部段上;
图3a和3b分别示出具有可调整的驱动线圈的运输单元的俯视图,所述运输单元在运输路段的笔直的路段部段上;
图4示出具有磁阻元件的运输单元的横剖视图,所述运输单元在运输路段的两侧的路段部段上;
图4a示出具有定子侧的磁阻元件的运输单元的俯视图,所述运输单元在运输路段的笔直的路段部段上;
图5示出具有附加线圈的运输单元的俯视图,所述运输单元在运输路段的笔直的路段部段上;
图6示出根据本发明的调节器设计;
图7a和7b示出沿纵向方向在运输路段的转送位置中的运输单元的俯视图。
具体实施方式
在图1中示例性示出呈长定子线性马达形式的运输装置1。运输装置1由多个运输区段TSk(k≥1在此是索引,所述索引代表所有现有的运输区段TS1、TS2、TS3…)构成,出于清晰原因仅示例性地标出其中的运输区段TS1…TS7。运输区段TSk分别设置在运输路段2的一侧上。运输区段TSk形成不同的路段部段,例如具有不同的角度和半径、岔路等的笔直段、曲线等,并且能够非常灵活地组合,以便构成运输装置1的运输路段2。因此,各运输区段TSk共同形成位置固定的运输路段2,运输单元Tn(n≥1在此是索引,所述索引代表所有现有的运输单元T1、T2、T3、T4…)能够沿着所述运输路段运动。这种模块化结构能够实现运输装置1的非常灵活的构型。在此,运输区段TSk当然设置在没有示出的位置固定的支撑结构上。运输装置1构成为长定子线性马达,在该长定子线性马达中运输区段TSk以本身已知的方式分别构成长定子线性马达的长定子的一部分。因此,沿着运输区段TSk沿纵向方向以已知的方式设置有多个构成定子的、位置不变地设置的电驱动线圈7、8(在图1中出于清晰原因仅为运输区段TS1、TS2、TS3、TS4、TS5、TS6、TS7标明),所述电驱动线圈与运输单元T1…Tn(在图1中处于清晰原因仅对于运输单元T6标明)上的驱动磁体4、5能够配合作用,以产生驱动力Fv。驱动线圈7、8以至今已知的方式通过调节单元10操控(仅在图1中标明),以便施加对于运输单元Tn的期望的运动所需的线圈电压。
沿着运输路段2也可存在如下路段部段,在所述路段部段上在两侧设置有运输区段TSk,运输单元Tn在所述运输区段之间运动(例如运输区段TS1、TS4)。当运输单元Tn在两侧上(沿运动方向观察)配备有驱动磁体4、5时,于是运输单元Tn也可以同时与设置在两侧的运输区段TSk或者与其驱动线圈7、8配合作用。因此当然总体上也能够产生更大的驱动力Fv。
在运输单元Tn上当然还设有(在此出于清晰原因没有示出的)引导元件,如滚、轮、滑动面、引导磁体等,以便运输单元Tn沿着运输路段2引导和保持,尤其也在静止时如此。运输单元Tn的引导元件在此为了引导而与运输路段2或运输区段TSk配合作用,例如在其中引导元件支撑、钩紧在运输路段上、在运输路段上滑动或滚动等。在驱动线圈7、8和驱动磁体4、5之间构成有气隙20。
根据图2a应阐述本发明的第一设计方案。第一设计方案示出根据本发明的运输装置1在具有一个运输区段TSk的一个笔直的路段部段上的一种实施形式的俯视图。以已知的方式,在运输单元Tn的驱动磁体4和呈运输区段TSk形式的长定子的驱动线圈7之间设置有具有气隙间距L的气隙20。驱动磁体4能够构成为电动磁体(励磁线圈)和/或构成为永磁体。驱动线圈7优选设置在铁磁芯13(例如铁叠片组)的齿12上。但是驱动线圈7当然也能够无芯地构成。
在此,以已知的方式在通电的驱动线圈7和驱动磁体4之间构成有磁回路21(在图2中标明),在磁回路的闭合磁路中产生磁通量ψ。每个通电的驱动线圈7和每个驱动磁体4在此能够视为磁压源。因此在运输路段2上(从各个通电的驱动线圈7中)获得磁压源,所述运输单元分别产生磁压Um。磁回路21具有磁阻Rm,所述磁阻以已知的方式作为总和由闭合磁路的各个部段的不同磁阻产生。对于磁回路21于是适用已知的关系Um=Rm·ψ。根据本发明,为了在运输单元Tn沿着运输路段2运动期间改变磁回路21中的磁通量ψ,可改变磁回路21的由运输单元Tn的磁压源产生的磁压Um的强度和/或磁回路21的磁阻Rm,如下面还将详细描述的那样。
此前避免在运输单元Tn沿着运输路段2运动期间在运输单元Tn上的磁回路21的磁阻Rm或磁回路21的磁压Um的改变,这是因为实际的实现方案与驱动线圈7的线圈电流的改变相比是相对耗费的。
在图2a中示出本发明的第一实施形式。在此,运输单元Tn的驱动磁体4优选设置在载体板6上,所述载体板经由至少一个第一调整机构9、优选经由多个第一调整机构9与运输单元Tn的基体3连接。优选的是,载体板6由固态的铁磁材料例如铁构成,以便有针对性地引导磁场。在此,对于每个驱动磁体4也能够分别设有一个自身的第一调整机构9,或者也设有多个第一调整机构9,或者对于多个驱动磁体4能够设有一个第一调整机构9或者也设有多个第一调整机构9。但是第一调整机构9与驱动磁体4的关联性不大。重要的是,至少一个驱动磁体4能够通过至少一个第一调整机构9以六个可行的运动自由度至少之一运动。但是如果所述至少一个第一调整机构9直接作用于所述至少一个驱动磁体4,那么也能够弃用载体板6。调整机构9在所示出的设计方案中能够实现至少一个驱动磁体4的运动,例如经由载体板6沿横向方向y(与运输单元Tn沿着运输路段的运动方向x正交)相对于运输单元Tn的基体3运动。基于运输单元Tn在运输路段2上或者在运输区段TSk上沿横向方向y在设计方面预设的引导而阻止了运输单元Tn沿横向方向y的横向位移,通过驱动磁体4的沿横向方向y的这样的运动改变了气隙20的气隙间距L。
所述至少一个第一调整机构9由操控单元A操控。以这种方式可行的是,借助于所述至少一个第一调整机构9,在运输单元Tn沿着运输路段运动期间在至少一个驱动磁体4的区域中、优选在所有驱动磁体4的区域中改变气隙20的气隙间距L。
通过改变气隙间距L,当然能够直接对磁回路21的磁阻Rm产生影响,进而也对产生的磁通量ψ产生影响。
但是所述至少一个驱动磁体4原则上也可以任意地在其在运输单元Tn上的位置方面发生改变,以设定磁阻Rm。如果所述至少一个驱动磁体4的位置通过以至少一个运动自由度移动和/或扭转来改变,那么除了气隙20的可能的改变之外,磁回路21的磁路进而还有在磁回路21中的磁阻Rm和磁通量ψ因此也发生改变。如果例如驱动磁体4转动了90°,那么直接作用于磁路进而作用于磁回路21中的磁通量ψ。
所述至少一个第一调整机构9优选构成为,使得在短时间内例如在数毫秒内能够施加用于移动驱动磁体4的足够大的力和路径。理想地,例如能够在调节驱动线圈7的时间步长内改变气隙间距L进而改变磁阻Rm。调节的时间步长限定:由调节单元10以何种频率预设新的调整参量(例如新的线圈电压)并且将其施加到驱动线圈7上。附加地,用于调整气隙20的气隙间距L或用于调整磁回路21的磁阻Rm的第一调整机构9应具有低的能量需求。优选地,第一调整机构9通过足够快速的压电执行器构成,但是也能够设想其它的具有与压电执行器类似的特性的实施方案。为了所述至少一个第一调整机构9以及操控单元A的能量供给,电压源11例如电池能够设置在运输单元Tn上。然而也能够以不同的方式提供能量,例如通过长定子的或运输路径另一构件的感应式能量传输提供能量,所述感应式能量传输也可用于对能量源11进行充电。在任何情况下重要的是,在运行期间的任意时间都以足够的能量对运输单元Tn或所述至少一个第一调整机构9进行供电,以调整所述至少一个驱动磁体4。操控单元A能够获得长定子线性马达1的其它装置的命令、例如从调节单元10中获得命令,以调整气隙间距L,或者可在运输单元Tn上设置单独的调节单元14。
至今为止,在现有技术中,提供了位于位置固定地设置在运输单元Tn上的驱动磁体4和长定子的位置固定地设置的驱动线圈7之间的固定的恒定的气隙。然而,这种布置的缺点是,尤其在长的运输单元Tn中在强烈弯曲的运输路径上,产生在运输单元Tn的各个驱动磁体4和长定子线性马达的长定子的驱动线圈7之间的不同的间距L。所述不同的间距L在运输单元Tn沿着弯曲的运输路段2运动期间引起较大的磁通量波动并且要求通过调节单元10对驱动线圈7进行更大的调节干预,以便维持期望的驱动力Fv。
图2b借助运输装置1在运输路段2的弯曲的路段部段的区域中的俯视图示出本发明的这种实施形式。与至今描述的根据图2a的实施形式不同,在此在所述至少一个调整机构9和驱动磁体4之间未设置载体板6,而是各个驱动磁体4i的位置在此能够个体地借助于相对应的第一调整机构9j分别在一个运动自由度上发生改变,在此沿横向方向y发生改变。但是当然也可设想的是,驱动磁体4i的位置在多个运动自由度上运动,例如沿横向方向y的运动和围绕Y轴线的扭转或六种可行的运动自由度的其它组合。为了改变磁回路21的磁阻Rm,在图2b中示出的实施例中分别仅调整在运输单元Tn的相应驱动磁体4i和长定子的与驱动磁体配合作用的驱动线圈7之间的间距Li。由此即使在弯道行驶中以及在运输路段的弯曲部段中也可行的是,在各个驱动磁体4i和与驱动磁体配合作用的驱动线圈7之间设定近似恒定的气隙间距Li,意即在运输单元Tn的总长度上。
对此优选地,为运输单元Tn的每个驱动磁体4i配设有第一调整机构9j以改变磁回路21的磁阻Rm,使得每个驱动磁体4i能够在其位置方面个体地进行调整,如在图2b中示出的那样(索引i、j在此表示所设置的驱动磁体4或第一调整机构9的数量)。但是也可能足够的是,并非全部、而是仅特定的驱动磁体4i进行调整,例如沿运动方向x观察第一和最后的驱动磁体4i。
在根据图2c的实施形式中,至少一个驱动磁体4i的位置可在第二运动自由度上(在此为围绕z轴线的角度αi)发生改变。因此,不仅借助于至少一个相对应的第一调整机构9j个体地调整在运输单元Tn的至少一个驱动磁体4i和运输路段2的与驱动磁体配合作用的至少一个驱动线圈7之间的气隙间距Li,而且附加地调整运输单元Tn的在运输路段2的所述至少一个驱动磁体4i和所述至少一个与驱动磁体配合作用的驱动线圈7之间的角度αi。然而有利地,借助于多个相对应的第一调整机构9j对多个驱动磁体4i进行调整,由此例如能够在运输单元Tn的总长度上实现大致均匀的气隙间距L,如在图2c中所示。
当然也可设想的是,例如借助于相对应的第一调整机构9j来调整传输单元Tn的第一个和最后一个驱动磁体4i,并且类似于根据图2a的实施例将位于其间的驱动磁体4i设置在可借助于一个或多个第一调整机构9j调整的载体板6上。也可设想的是,每个单独的驱动磁体4i以可调整的方式构成(例如在图2b中为借助于调整机构9i的驱动磁体4i)或者驱动磁体4i例如分别成对地设置在一个较小的载体板6上,所述载体板6能够借助于一个或多个第一调整机构9j进行调整。原则上,许多这样的实施形式是可调整的并且能够根据运输单元Tn以及运输路段的类型和实施方案选择本发明的一个实施形式,例如根据运输单元Tn的长度、传输单元Tn的驱动磁体4i数量或运输路段的曲率来选择。当然,位置的改变不限于所提及的示例,也可设想的是运动自由度的任意其它组合,以便调整驱动磁体4i的位置,进而有针对性地影响磁回路21的磁阻Rm从而影响磁通量ψ。
根据本发明的另一设计方案,为了改变磁回路21的磁阻Rm,借助于至少一个设置在运输路段2上的并且与运输路段2的所述至少一个驱动线圈7配合作用的第二调整机构16、17在至少一个运动自由度上如下面根据图3a和3b所述的那样改变运输路段2的至少一个驱动线圈7的位置。
在图3a中示出运输单元Tn在运输路段2的笔直的路段部段上的俯视图。在此,为了改变位于运输单元Tn的驱动磁体4和运输路段2或运输区段TSk的与驱动磁体配合作用的驱动线圈7之间的气隙间距L(进而磁回路21的磁阻Rm),优选将多个第二调整机构16i设置在运输路段2上。例如,第二调整机构16i能够设置在运输路段2的固定的支撑结构22和运输区段TSk之间并且例如由调节单元10来操控。类似于第一调整机构9i,第二调整机构16i例如能够构造为压电执行器或其它适宜的执行器。第二调整机构16i优选由调节单元10操控为,使得在运输单元Tn沿着运输路段2运动期间,例如能够沿横向方向Y调整运输区段TSk与设置在其上的驱动线圈7。由此,改变位于运输区段TSk的驱动磁体4和驱动线圈7之间的气隙间距L,由此能够有针对性地影响磁回路21的磁阻Rm进而有针对性地影响磁通量ψ。当然,例如为了增强磁阻Rm的改变效果或者当第一和/或第二调整机构9i、16i的可实现的路径或行程受到限制时,也可设想与运输单元Tn的驱动磁体4的位置调整的组合(如根据图2a-2c示出的那样)。
在图3b中示出另一实施形式,其中,第二调整机构16i设置在运输区段TSk的可运动的线圈区段26上,由此能够在至少一个运动自由度上、优选沿横向方向Y个体地调整驱动线圈7i包括铁磁芯13的一部分(尤其是芯14的齿12)的位置。在此,线圈区段26的具体设计方案是不重要的,例如可设想的是,线圈区段26借助于适宜的引导装置可运动地设置在运输路段TSk上,使得线圈区段26能够借助于第二调整机构16i在其位置方面发生改变。通过沿Y方向调整线圈区段26和设置在其上的驱动线圈7i,能够(类似于根据图2b、2c的设计方案)个体地调整位于各个驱动线圈7i和与驱动磁体配合作用的驱动磁体4i之间的气隙间距Li,这直接影响磁回路21的磁阻Rm,从而影响磁通量ψ。也在此,第二调整机构16i优选由压电执行器或其它适宜的调整机构构造而成,所述调整机构例如能够由调节单元10(在图3b中未示出)来操控。当然例如与根据所描述的变型方案的可调整的驱动磁体4i的组合也是可行的。在图3b中例如示出类似于根据图2a描述实施形式的变形方案,其中,运输单元Tn的驱动磁体4设置在可沿Y方向调整的共同的载体板6上。载体板6由操控单元A的调节单元14借助于第一调整机构9操控为,使得驱动磁体4能够沿Y方向运动,由此能够改变磁回路21的磁阻Rm和因此磁通量ψ。
原则上,对驱动线圈7i和/或驱动磁体4i的位置进行调整的精确的结构上的设计方案对于本发明是不重要的,重要的仅是,至少一个、优选多个驱动线圈7i的位置在至少一个运动自由度上是可变的,使得磁回路21的磁阻Rm是可变的。对此当然存在多种可能性,以便实现上述内容。
出于简单示出的原因,根据运输路段2的单侧实施方案来描述所述实施例,当然,但是本发明也涵盖双侧的实施方案,在该双侧的实施方案中在沿运动方向x观察在运输单元Tn的两侧上设有驱动磁体4i、5i和具有驱动线圈7i、8i的运输区段TSk、TSm。因此,既能够是运输单元Tn在两侧上具有可借助于第一调整机构9i、10i调整的驱动磁体4i、5i,也能够是运输路段2在设置在运输单元Tn两侧上的运输区段TSk、TSm上具有能够借助于第二调整机构16i、17i调整的驱动线圈7i、8i(运输区段TSm和第二调整机构17i在图3a和3b中没有示出,所述设计方案类似于运输区段TSk或第二调整机构16i)。当然组合也是可设想的。
本发明的另一设计方案在图4中借助在两侧运输路段2区域中的运输单元Tn的横剖视图示出。运输单元Tn在两侧上具有驱动磁体4、5,并且运输路段2在两侧上具有运输区段TSk、TSm,在所述运输区段上设置有驱动线圈7、8,所述驱动线圈已知地与在运输单元Tn的相应侧上的驱动磁体4、5配合作用,以产生驱动力Fv。根据本发明,为了改变两侧的磁回路21a、21b的相应磁阻Rm,设有至少一个磁阻元件24,所述磁阻元件借助于设置在运输单元Tn上的或者设置在运输路段2上的第三调整机构23a、23b引入驱动磁体4、5和驱动线圈7、8之间。磁阻元件24优选构成为,使得其具有特定的磁导率μ以影响相应磁回路21a、21b的磁阻Rm。根据期望的实施形式,磁阻元件24的材料选择为,使得增大或减小相应磁回路21a、21b的磁阻Rm。如在图4中可见的那样,所述至少一个第三调整机构23a、23b能够设置在运输单元Tn(调整机构23a)上或者设置在运输路段2(调整机构23b)上。例如,所述至少一个第三调整机构23又构成为压电执行器或其它适宜的调整机构。设置在运输路段2上的第三调整机构23b例如可能由调节单元10操控,并且设置在运输单元Tn上的调整机构23a可能例如由调节单元14操控。根据具体的设计方案可设想的是,磁阻元件24例如借助于适宜的机制枢转到、插入气隙20中,或以其它实施的方式引入气隙20中。精确的实施形式对于本发明是不重要的,重要的是,磁阻元件24能够在足够短的时间内引入气隙20中,使得能够有针对性地改变磁回路21a、21b的磁阻元件Rm进而改变磁回路21a、21b中的磁通量ψ。显然,这样的磁阻元件24也能够用于单侧的布置,如在图2a或图3a中使用的那样。
在图4a中示出本发明的另一设计方案。为了改变磁回路21的磁阻Rm,根据本发明提出,在运输路段2上设有开口29,磁阻元件27可引入所述开口中。为此,在运输路段2上设置有第四调整机构28,借助所述第四调整机构将磁阻元件27伸入开口29中并且能够从所述开口29中移出,如通过图4a中的双箭头标识的那样,以改变磁回路21的磁阻Rm。在此,开口29能够如在图4a中示出的那样构成为,使得开口在运输路段2上沿横向方向、即沿Y方向穿过辅助结构22并且延伸到运输区段TSk的铁磁芯13中。在此重要的是,开口29延伸直至芯13中(或者直至构成磁回路21的区域中),使得磁阻元件27在向内运动到开口29中或者从开口29中向外运动时能够影响磁回路21的磁阻Rm,所述磁阻在芯13中传播。图4a中的视图当然仅应示例性地理解,也可以设置有更多或更少的开口19、磁阻元件27和第四调整机构28。开口29和磁阻元件27的大小和形状也可任意选择。为了加强对磁回路21的影响,例如也可设想的是,开口29延伸直至芯13的齿12中。磁阻元件27和第四调整机构在沿Y方向延伸的开口29的情况下当然构成为,使得磁阻元件27可沿Y方向运动。根据期望的实施形式,材料、因此主要是磁阻元件27的磁导率μ选择为,使得磁回路21的磁阻Rm在要引入磁阻元件27时增大或减小。设置在运输路段2上的第四调整机构28例如可以由调节单元10操控。但是也可设想的是,开口29如此设置在运输路段2上,使得其不沿Y方向延伸、而是沿Z方向延伸,并且磁阻元件27相应地沿Z方向可移动地设置。精确的实施形式对于本发明是不重要的,重要的是,磁阻元件27借助于适宜的机制通过向内枢转、插入或者以其它适宜的方式能够以足够短的时间引入开口29中,使得能够有针对性地改变磁回路21的磁阻Rm进而改变磁回路21中的磁通量ψ。
本发明的另一设计方案在图5中根据运输单元Tn在运输路段2的一个路段部段上的俯视图示出。与此前描述的实施形式相反,现在不改变磁回路21的磁阻Rm,而是改变在运输单元Tn上产生的磁压Um。为了改变在运输单元Tn上的磁压Um,至少一个附加线圈25设置在运输单元Tn上,其中,可以至少暂时地将附加电压Uz施加到附加线圈25上,以至少暂时地增加或减小在运输单元Tn上的磁压Um,由此产生与驱动磁体4i的磁压Um相同或相反方向的附加磁压Umz,因此能够产生附加的磁通量ψz,其增大或减小磁回路21的磁通量ψ。优选地,多个附加线圈25i设置在运输单元上,例如每个驱动磁体4i设置一个附加线圈25i。附加线圈25i例如能够由设置在运输单元Tn上的能量源11用附加电压Uz进行供给,并且由运输单元Tn的操控单元A的调节单元14操控。通过至少暂时地施加附加电压Uz,由附加线圈25i产生附加磁压Umz,所述附加磁压与驱动磁体4i的磁压Um叠加。根据关系式Um=Rm*ψ,也能够由此有针对性地改变或增大磁回路21的磁通量ψ。
根据本发明,此前描述的用于改变磁回路21的磁通量ψ的方法能够特别有利地用于补偿运输路段2的引导精度、增大运输单元Tn的最大可实现的速度Vmax或者实现运输单元Tn到两侧的运输路段2的转送站U中的转送,如下文中还将详细阐述的那样。
根据所描述的根据本发明的方法的第一应用提出,确定磁回路21中的实际磁通量ψist,并且调节单元10、14将实际磁通量ψist调节为限定的期望磁通量ψsoll,其方式为由调节单元10、14改变在运输单元Tn上的磁阻Rm和/或磁压Um。但是“调节”在本文中非强制性地表示利用所确定的实际磁通量ψist(或物理等效量)的反馈的“闭环”调节,而是也可设想受控的“开环”运行。例如,为此例如能够将例如期望磁通量ψsoll的特征曲线存储在调节单元10、14中,其中,调节单元10、14根据特征曲线操控现有的调整机构9、16、23。实际磁通量ψist能够以已知的方式测量,或者能够在观察者中从可用的测量参量中估算。如已经详细描述的那样,通过不同方式改变磁回路21的磁通量ψ,例如通过运输单元Tn的驱动磁体4、5的位置改变、通过运输路段2的驱动线圈7、8的位置改变、通过将磁阻元件24引入气隙20中、通过将磁阻元件27引入运输路段2的开口19中或者通过改变在运输单元Tn上的磁压Um。在笔直的或不那么弯曲的运输路段2中能够足够的是,例如驱动磁体4设置在一个共同的载体板6上,并且借助于至少一个第一调整机构9沿Y方向调整该载体板6,以便改变气隙210中的气隙间距L并且因此改变磁回路21的磁阻Rm进而改变磁通量ψ。替选地,例如能够借助于至少一个第二调整机构16改变运输路段2的至少一个驱动线圈7的位置,优选沿Y方向。在弯曲程度较强的运输路段中有利的是,至少个体地借助于至少一个第一调整机构9、优选多个第一调整机构9j可调整各个驱动磁体4i的气隙间距Li。但是为了附加地增大气隙20的均匀性,各个驱动磁体4i也能够可调整角度地构成,其中,在位于各个驱动磁体4i和与驱动磁体配合作用的驱动线圈7之间的气隙20中的角度αi能够借助于至少一个第一调整机构9、优选借助于多个第一调整机构9j调整。
为了尤其在弯道中不从运输路段2脱落,能够在运输单元Tn上设置有引导元件(未示出),所述引导元件与运输路段配合作用,以引导运输单元Tn,因此例如借助于适宜的引导元件支承于其上。这样的引导的精度与不同的影响因素有关,例如与各个部件的制造公差、与运输路段2和引导部件的磨损、与维护等有关。例如能够给定运输路段2的例如由于不同负载和/或运输单元Tn不同速度而具有较高磨损的区域和具有较低磨损的区域。运输单元Tn当然一定也受到磨损,这会引起增大机械的引导元件的间隙。在运输单元Tn上的和/或在运输路段2上的磨损例如能够引起:在运输单元Tn沿着运输路段2运动时改变气隙20的大小,即在运输单元Tn的驱动磁体4和长定子的驱动线圈7之间的间距L,这会相应引起磁回路21中的不同大小的磁通量ψ。在例如具有运输单元Tn的期望的恒定的驱动力Fv的情况下,因此必须持续地调整驱动线圈7的线圈电压,以补偿运输单元Tn的运动的穿过调节器(调节单元10)的波动的磁通量ψ,这由于调节的所需的动力学(在短的时间步长内的大的调节干预)而提高对调节的要求。借助已经详细描述的根据本发明的对磁通量ψ的改变,现在可行的是,这样的引导精度通过与其脱耦的调节(运输单元Tn的调节单元14或在调节单元10中的附加调节)来补偿,其方式为:与调节运输单元Tn的运动有关地调节磁回路21中的磁通量ψ,如下文中借助图5描述的那样。
在图6中绘出根据本发明的调节结构的框图。调节参量是磁回路21的实际磁通量ψist,并且引导参量是磁回路21的期望磁通量ψsoll。实际磁通量ψist例如能够借助于在长定子上的适宜的观察者或者通过测量确定。为了形成调节误差eψ,将实际磁通量ψist与期望磁通量ψsoll进行比较。调节误差eψ(根据实施形式)在运输路段2的调节单元10中和/或在运输单元Tn的调节单元14中借助于适宜的调节器R
为了补偿运输路段2的引导精度,能够通过选择特定的期望磁通量ψsoll而例如预设和调节期望的、对应于期望磁通量ψsoll的恒定的气隙20。
根据按照本发明的方法的用于改变磁回路21的磁通量ψ的另一种应用,能够以简单的方式提高运输单元Tn的最大可实现的速度Vmax,如下文中还将描述的那样。原则上,运输单元Tn的最大可实现的速度Vmax受到可施加到驱动线圈7上的最大线圈电压的限制。可施加的最大线圈电压基本上通过驱动线圈7的功率电子单元的性能来预设。功率电子单元能够集成在调节单元10中,但是也能够是单独的硬件构件。在此,出于热学原因当然期望尽可能低的线圈电压。
由于物理感应定律,通过运动的运输单元Tn的驱动磁体4的运动的磁场在长定子的驱动线圈7中感应产生所谓的EMK电压U
U
磁通量ψ
但是如果想要虽然只是暂时地提高运输单元Tn的最大可实现的速度Vmax,例如以便将运输单元Tn尽可能快地从生产过程的工作站移动至下一工作站、但是在此不提高线圈电压,那么根据本发明减小磁回路21的磁通量ψ,其方式为:改变在运输单元Tn上的磁阻Rm和/或磁压Um。在此,磁阻Rm和/或磁压Um的改变能够借助已经详述的方法来执行,但是也可设想的是,将多个方法进行组合。因此可设想的是,仅一个第一调整机构9(或多个第一调整机构9)设置在运输单元Tn上,借助所述第一调整机构通过驱动磁体4的位置改变来增大磁回路21的磁阻Rm。但是也能够将仅一个第二调整机构16(或多个第二调整机构16)设置在运输路段2上,借助所述第二调整机构能够改变运输路段2的至少一个驱动线圈7的位置进而能够增大磁回路21的磁阻Rm。也可设想的是,借助于一个(或多个)可从位于运输单元Tn的至少一个驱动磁体4和运输路段2的至少一个与驱动磁体配合作用的驱动线圈7之间的气隙20中移除的磁阻元件24(或者类似地借助于定子侧的磁阻元件27)来增大磁阻Rm。或者能够减小在运输单元Tn上的磁压Um,其方式为:施加由设置在运输单元Tn上的附加线圈25产生的并且与驱动磁体的磁压Um反向的附加磁压Umz。同构增大磁回路21的磁阻Rm,在驱动线圈7中具有不变的线圈电压的情况下,不仅磁回路21的磁通量ψ减小,而且当然也减小由驱动磁体4引起的磁通量ψ
通常,在运输装置1中,运输区段TSk的驱动线圈7、8例如由调节单元10调节,使得与相应运输区段TSk的驱动线圈7配合作用的运输单元Tn通过所产生的驱动力Fv以期望的方式(位置、速度、加速度、冲击)沿着运输区段TSk运动。例如能够由此与加载和路段引导无关地调节运输单元Tn的恒定的速度V。如果在驱动线圈7上的线圈电压保持不变的情况下,磁阻Rm增大和/或磁压Um减小,以便减小磁回路21中的磁通量ψ,那么由于由此产生的较低的EMK电压U
但是在通常情况下,在用于调节运输单元Tn的运动的调节单元10中实施反馈调节。在此,例如预设运输单元Tn的期望速度并且由调节单元10通过预设起作用的驱动线圈7的线圈电压来进行调节。如果在该情况下增大磁阻Rm和/或减小磁压Um以便减小磁回路21中的磁通量ψ,那么调节单元10一如既往确保保持调节期望速度。在该情况下,调节单元10因此减小所施加的线圈电压,以便反作用于运输单元Tn的较高的速度V。但是在该情况下,实现运输单元Tn的较高的速度V,其方式为:提高期望速度。尽管如此能够以这种方式充分利用更高的速度势能。
在这两种情况下因此能够实现,尽管线圈电压尤其受到功率电子设备和热学极限的限制但仍然能够增大运输单元Tn的最大可实现的速度Vmax。因此,在功率电子单元不变的情况下获得用于运输单元Tn的更大的速度范围,由此能够更灵活地对期望的过程控制做出响应。磁回路21的磁阻Rm或磁压Um的根据本发明的改变当然也能够在两侧构成的运输路段中执行。为此,在运输单元Tn的基体3的两侧设置有驱动磁体4、5,所述驱动磁体与两侧的运输路段的驱动线圈7、8配合作用,以产生驱动力Fv。在此可以的是,驱动磁体4、5借助于第一调整机构9、10、驱动线圈7、8借助于第二调整机构16、17、磁阻元件24、27借助于第三和第四调整机构23、28来改变磁阻Rm,和/或附加线圈25用于改变运输单元Tn上的磁压Um,或者这些可能性的组合。但是也可设想的是,在两侧的实施形式中例如仅将磁回路21a的磁阻Rm或磁压Um以可调整的方式构成在一侧上(驱动磁体4的侧),并且将磁回路21b的磁阻Rm或磁压Um不变地构成在另一侧上(驱动磁体4的侧)。
例如,借助于在图6中描述的调节方法能够实现运输单元Tn的最大可实现的速度Vmax的提高。同样又与运输单元Tn的运动的调节无关。在此,例如预设期望磁通量ψsoll,所述期望磁通量引起更大的气隙20,由此引起更大磁阻Rm进而引起更小的磁通量ψ。替选于改变气隙20,能够如上所述为了改变磁通量ψ例如也将磁阻元件24从气隙20中移除,或者将磁阻元件27从运输路段2的开口29中移除,以便增大磁阻Rm。所述调节当然能够又与所描述的用于改变磁通量ψ的方法任意组合。
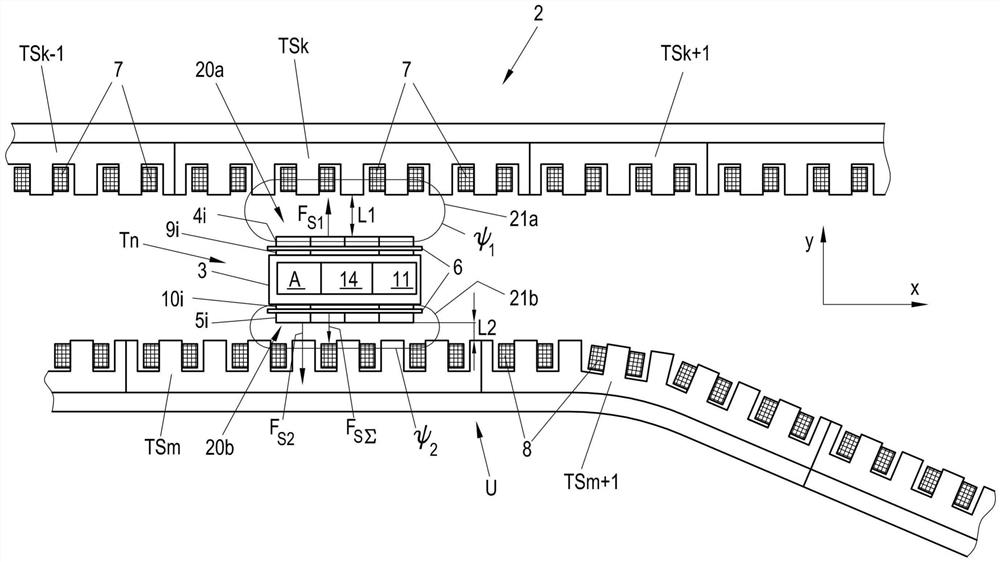
参考图7a和图7b示出根据本发明的方法的用于将运输单元Tn在运输路段2的转送站U上转送的另一有利的应用。这种转送站U例如以岔道的形式在图1中示出。但是转送位置U当然也能够构成为笔直的转送位置U,如同样在图1中(例如在运输区段TS1、TS4中)示出的那样,以便将运输单元Tn的沿着运输区段TSk在一侧上的单侧引导转送到在另一侧上的运输区段TSm。在转送位置U的区域中,沿运动方向x观察,在两侧上设置有驱动线圈7、8。运输单元Tn在此构成为,使得在基体3两侧上设置有驱动磁体4i、5i,所述驱动磁体与运输路段2的设置在两侧上的驱动线圈7、8配合作用,以沿运动方向x形成驱动力Fv。但是,运输路段2能够如已经描述的那样也在转送位置U之外在两侧上构成,因此具有设置在两侧上的驱动线圈7、8,例如以便与单侧的运输路段2相比产生更大的驱动力Fv以克服运输路段2的升高,以运输高的负载或者用于高的加速度。为了使运输单元Tn向前运动,在两侧的驱动线圈7、8中以已知的方式优选引入在量值方面相同大小的定子电流i
已知地,在两侧上沿横向方向y始终将侧向力F
在图7a中的具有在两侧上设置在运输单元Tn上的并且设置在可运动的可借助于第一调整机构9i、10i操纵的载体板6上的驱动磁体4i、5i的实施形式的示例中(相应于根据图2a的实施形式的原理),例如在位于驱动磁体4和驱动线圈7之间的运输单元Tn的一侧上增大气隙20a的气隙间距L1,和/或在位于驱动磁体5i和驱动线圈8之间的运输单元Tn的另一侧上减小气隙20b的气隙间距L2(或者反之,根据运输单元Tn在转送位置U上的控制)。当然也可设想的是,仅增大一侧的气隙20a的气隙间距L1,并且将在另一侧上的气隙20b的气隙间距L2保持恒定,在此重要的仅是,气隙20a、20b相互间的相对改变。在运输单元Tn或者气隙的调整的一个替选的实施形式中,如根据图2b和图2c描述的那样,当然也能够调整在位于各个驱动磁体4i、5i和驱动线圈7、8之间的气隙20中的间距Li和角度αi。基于现在不同大小的气隙间距L1≠L2,在两侧上产生在磁回路21a、21b中的不同大小的磁通量ψ1≠ψ2,这在具有保持不变的线圈电压或定子电流i
转送方法当然也能够借助其它所描述的用于改变磁通量ψ的方法来实现。在图7b中例如示出如下转送位置U,在该转送位置中(类似于根据图3a的实施形式)在运输路段2的一侧上将第二调整机构16i设置在固定的支撑结构22和运输区段TSk之间,借助第二调整机构能够改变磁回路21a的磁通量ψ1,其方式为:通过改变气隙间距L1可改变磁阻Rm。如果在运输区段TSk的驱动磁体4和驱动线圈7之间的气隙间距L1与在运输区段TSm的驱动磁体5和驱动线圈8之间的气隙间距L2相比减小(L1
在转送位置U的区域之外,励磁的侧向力F
此外,用于借助于磁阻元件24、27改变磁阻Rm的方法能够用于将运输单元在转送位置U中转送,或者根据本发明的在运输单元Tn上的附加线圈25也能够用于改变在运输单元Tn上的磁压Um。也可设想所描述的用于在一侧上或两侧上改变磁通量ψ的可能性的任意组合。因为已经充分描述了所述方法并且遵循改变磁通量ψ的本发明构思,所以基于此不再关于转送位置U进行单独研究。
- 用于运行运输装置的方法和运输装置
- 具有至少一个运输设备的运输装置以及用于制造、运行和维护运输装置的方法