一种防夹手的自动门
文献发布时间:2023-06-19 18:29:06
技术领域
本发明属于自动门技术领域,尤其涉及一种防夹手的自动门。
背景技术
自动门从理论上理解应该是门的概念的延伸,是门的功能根据人的需要所进行的发展和完善,自动门行业发展已日渐成熟,自动门是指:可以将人接近门的动作(或将某种入门授权)识别为开门信号的控制单元,通过驱动系统将门开启,在人离开后再将门自动关闭,并对开启和关闭的过程实现控制的系统。
自动门能够自动检测到人们的接近从而自动打开,当人们离开其检测范围后,自动门又能够自动关闭,一般是通过红外线感应装置来实现这一功能的,但是红外线感应装置的检测范围有一定的限度,当人们只有手指位于门扇之间时,可能会无法检测到手指的存在,自动门依然会自动关闭,这种情况下就容易夹伤人们的手掌或者手指,有一定的安全隐患。
发明内容
本发明提供一种防夹手的自动门,旨在解决在自动门中的红外线感应装置的检测范围有一定的限度,当人们只有手指位于门扇之间时,可能会无法检测到手指的存在,自动门依然会自动关闭,这种情况下就容易夹伤人们的手掌或者手指,有一定的安全隐患的问题。
本发明是这样实现的,一种防夹手的自动门,包括门框、两个固定门、第一推拉门和第二推拉门;
两个所述固定门分别固定连接于所述门框内部的的两端,所述门框内部的上方和下方均沿其长度方向分别设置有上安装板和下安装板,所述第一推拉门和所述第二推拉门均沿所述门框的长度方向通过滑轮滑动连接于所述上安装板和所述下安装板之间;
所述门框的顶端沿其长度方向固定连接有装置框,所述装置框的内部固定连接有红外线感应器,所述装置框的前端表面且位于所述红外线感应器发射端的位置开设有与其适配的通孔,所述装置框的内部且位于所述红外线感应器的一侧固定连接有PLC编程控制器,所述上安装板和所述下安装板的表面且位于所述门框长度方向上的中线部位均贯通开设有安装孔,所述上安装板和所述下安装板的所述安装孔中分别固定连接有激光发生器和激光接收器,所述红外线感应器、所述激光发生器和所述激光接收器均与所述PLC编程控制器信号连接;
所述第一推拉门位于所述第二推拉门一侧的竖向门框的外侧表面沿其长度方向开设有安装槽,所述安装槽的内部沿其宽度方向滑动连接有滑动条,所述滑动条的内端与所述安装槽之间横向固定连接有多个弹簧,所述安装槽的内侧表面设置有多个压力传感器,多个所述压力传感器均与所述PLC编程控制器信号连接,多个所述弹簧不受力时,所述滑动条的外端位于所述门框的外部。
优选的,所述上安装板的表面贯通开设有两个通槽,两个所述通槽以所述门框长度方向上的中线相互对称,所述第一推拉门和所述第二推拉门的顶端均沿其宽度方向固定连接有齿条,两个所述齿条分别通过两个所述通槽延伸至所述装置框的内部,所述装置框的内部横向转动连接有两个转轴,两个所述转轴的表面均固定连接有第一齿轮,两个所述第一齿轮分别与两个所述齿条啮合,两个所述转轴以所述门框长度方向上的中线相互对称。
优选的,两个所述转轴的一端均可转动地贯通至所述装置框的后侧表面,两个所述转轴的表面且位于所述装置框的外部均固定连接有第一皮带轮,所述装置框的后侧表面转动连接有两个以其长度方向上的中线相互对称的动力轴,两个所述动力轴的表面均固定连接有第二皮带轮,两个所述第一皮带轮分别与两个所述第二皮带轮相互对应,两个所述第一皮带轮分别与相互对应的所述第二皮带轮通过皮带传动连接。
优选的,两个所述动力轴的表面且位于所述第二皮带轮的后侧均固定连接有第二齿轮,两个所述第二齿轮相互啮合,所述装置框的后侧设置有伺服电机,所述伺服电机的输出轴与一个所述第二齿轮固定连接。
优选的,所述滑动条的外端表面沿其长度方向固定连接有软质橡胶条。
优选的,所述第二推拉门位于所述第一推拉门一侧的竖门框的外表面沿其长度方向开设有与所述滑动条相对应且适配的卡槽。
优选的,位于同一所述转轴表面的所述第一齿轮和所述第一皮带轮的中轴线均与该转轴的中轴线位于同一直线,位于同一所述动力轴表面的所述第二皮带轮和所述第二齿轮的中轴线与该动力轴的中轴线位于同一直线。
优选的,所述伺服电机的输出轴的中轴线和与所述伺服电机输出轴固定连连接的所述第二齿轮的中轴线位于同一直线。
与现有技术相比,本发明的有益效果是:本发明的一种防夹手的自动门,通过设置激光发生器、激光接收器、滑动条和压力传感器,该自动门在两个推拉门之间的位置设置多个激光发生器和机构接收器,用于感应物体的存在,以此来控制两个推拉门的自动开合,并且通过设置滑动条和压力传感器作为第二重保障,当激光发生器未感应到手指时,即使推拉门开始自动关闭,在关闭的过程中,第一推拉门上的滑动条会与人们的手指首先接触,由于滑动条与手指接触,人们会做出反应将手指向外抽出,并且滑动条与第一推拉门的门框之间通过弹簧连接,不会影响到人们将手指抽出,即可防止人们手指被夹住,而当人们未及时将手指抽出,滑动条会被向安装槽内部压入并与压力传感器接触,压力传感器就会传递出信号以此来控制两个推拉门打开,也能够起到防止夹手的目的,实现了多重防护,从而提高了该装置的实用性。
附图说明
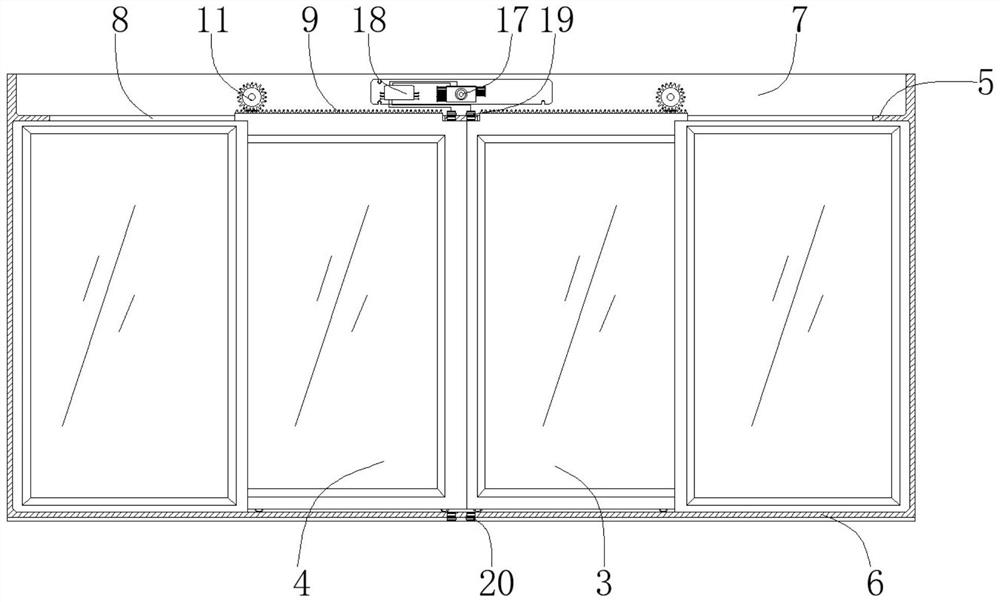
图1为本发明的外视图;
图2为本发明的结构示意图;
图3为本发明中推拉门动力系统结构示意图;
图4为本发明中推拉门动力系统外视图;
图5为本发明中防护洗头结构示意图。
图中:1、门框;2、固定门;3、第一推拉门;4、第二推拉门;5、上安装板;6、下安装板;7、装置框;8、通槽;9、齿条;10、转轴;11、第一齿轮;12、第一皮带轮;13、动力轴;14、第二皮带轮;15、第二齿轮;16、伺服电机;17、红外线感应器;18、PLC编程控制器;19、激光发生器;20、激光接收器;21、安装槽;22、弹簧;23、滑动条;24、压力传感器;25、软质橡胶条。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
请参阅图1-5,本发明提供一种技术方案:一种防夹手的自动门,包括门框1、两个固定门2、第一推拉门3和第二推拉门4;
两个固定门2分别固定连接于门框1内部的的两端,门框1内部的上方和下方均沿其长度方向分别设置有上安装板5和下安装板6,第一推拉门3和第二推拉门4均沿门框1的长度方向通过滑轮滑动连接于上安装板5和下安装板6之间;
门框1的顶端沿其长度方向固定连接有装置框7,装置框7的内部固定连接有红外线感应器17,装置框7的前端表面且位于红外线感应器17发射端的位置开设有与其适配的通孔,装置框7的内部且位于红外线感应器17的一侧固定连接有PLC编程控制器18,上安装板5和下安装板6的表面且位于门框1长度方向上的中线部位均贯通开设有安装孔,上安装板5和下安装板6的安装孔中分别固定连接有激光发生器19和激光接收器20,红外线感应器17、激光发生器19和激光接收器20均与PLC编程控制器18信号连接。
在本实施方式中,PLC编程控制器18能够接收红外线感应器17发出的信息来控制第一推拉门3和第二推拉门4的开启与关闭,红外线感应器17能够发出光幕,对门前方和后方一定距离的区域进行扫描,当有人或者物体进入该区域后,红外线感应器17就能够感应到人或者物体的靠近,之后就会向信号传递给PLC编程控制器18,PLC编程控制器18即可做出反应,控制第一推拉门3和第二推拉门4开启,而在第一推拉门3和第二推拉门4开启一段时间后,若红外线感应器17的感应区域范围内在一段时间内都没有物体存在,PLC编程控制器18接收到信号就会控制第一推拉门3和第二推拉门4开始关闭,以此即可做到自动关闭与开启的功能。
红外线感应器17为现有技术,当有人进入感应范围时,专用传感器探测到人体红外光谱的变化,自动接通负载,人不离开感应范围,将持续接通;人离开后,延时自动关闭负载。
激光发生器19和激光接收器20两两成对,并且设置有多组,均设置有在该门的中部位置,激光发生器19发出激光并被激光接收器20接收,当两者之间存在物体时,激光发生器19发出的激光被遮挡住,激光接收器20也就不会接收到激光,PLC编程控制器18也就能收到信号,来控制第一推拉门3与第二推拉门4保持长开的状态,而当所有的激光发生器19发出的激光都能被激光接收器20完全接收到时,激光接收器20发出的信号就会有所改变,PLC编程控制器18接收到此种信号并且红外线感应器17的感应范围内也没有物体时,就会控制第一推拉门3和第二推拉门4关闭。
激光发生器19和激光接收器20均为现有技术,在此不做赘述。
进一步的,第一推拉门3位于第二推拉门4一侧的竖向门框1的外侧表面沿其长度方向开设有安装槽21,安装槽21的内部沿其宽度方向滑动连接有滑动条23,滑动条23的内端与安装槽21之间横向固定连接有多个弹簧22,安装槽21的内侧表面设置有多个压力传感器24,多个压力传感器24均与PLC编程控制器18信号连接,多个弹簧22不受力时,滑动条23的外端位于门框1的外部。
在本实施方式中,当激光发生器19和激光接收器20出现问题或者人的手指未处于检测范围内第一推拉门3和第二推拉门4开始关闭时,若此时人的手部依然位于自动门的内部,当第一推拉门3与人接触时,人们感受到触感就会立即做出将手抽出的反应,而由于第一推拉门3上设置有滑动条23,滑动条23能够在安装槽21内自由滑动,也就不会影响人们将手抽出,可作为第一重保护,而即使人们没有即使的将手从门中抽出,当滑动条23进入安装槽21的内部一定距离后就会与压力传感器24接触,压力传感器24即可将信号传递至PLC编程控制器18中,PLC编程控制器18就会立刻做出反应控制第一推拉门3与第二推拉门4打开,也能够起到保护防夹的作用。
进一步的,上安装板5的表面贯通开设有两个通槽8,两个通槽8以门框1长度方向上的中线相互对称,第一推拉门3和第二推拉门4的顶端均沿其宽度方向固定连接有齿条9,两个齿条9分别通过两个通槽8延伸至装置框7的内部,装置框7的内部横向转动连接有两个转轴10,两个转轴10的表面均固定连接有第一齿轮11,两个第一齿轮11分别与两个齿条9啮合,两个转轴10以门框1长度方向上的中线相互对称。
两个转轴10的一端均可转动地贯通至装置框7的后侧表面,两个转轴10的表面且位于装置框7的外部均固定连接有第一皮带轮12,装置框7的后侧表面转动连接有两个以其长度方向上的中线相互对称的动力轴13,两个动力轴13的表面均固定连接有第二皮带轮14,两个第一皮带轮12分别与两个第二皮带轮14相互对应,两个第一皮带轮12分别与相互对应的第二皮带轮14通过皮带传动连接。
两个动力轴13的表面且位于第二皮带轮14的后侧均固定连接有第二齿轮15,两个第二齿轮15相互啮合,装置框7的后侧设置有伺服电机16,伺服电机16的输出轴与一个第二齿轮15固定连接。
在本实施方式中,当PLC编程控制器18收到指令需要打开或者关闭第一推拉门3或者第二推拉门4时,PLC编程控制器18会控制伺服电机16启动,伺服电机16启动后会带动与其输出轴固定连接的一个第二齿轮15转动,两个相互啮合的第二齿轮15就会开始进行同速相反方向的运动,从而通过两个第二皮带轮14带动两个第一皮带轮12进行同速相反方向的运动,与两个第一皮带轮12同轴的两个第一齿轮11也会开始转动,从而分别通过两个齿条9带动第一推拉门3和第二推拉门4进行位移,以此来控制第一推拉门3和第二推拉门4的开启或者关闭。
进一步的,滑动条23的外端表面沿其长度方向固定连接有软质橡胶条25。
在本实施方式中,在第一推拉门3运动的过程中,首先接触到人们的是软质橡胶条25,其自身材质柔软,即使人们快速将手抽出,也不会对人手部的皮肤造成划伤或者磨损,起到一定的保护作用。
进一步的,第二推拉门4位于第一推拉门3一侧的竖门框1的外表面沿其长度方向开设有与滑动条23相对应且适配的卡槽。
在本实施方式中,卡槽与滑动条23相适配,防止第一推拉门3和第二推拉门4合并后滑动条23被压入安装槽21内触发压力传感器24。
本发明的工作原理及使用流程:本发明安装好过后,正常运行的过程中,会通过红外线感应器17来感应该门的前后是否有人的存在,并将信号传递至PLC编程控制器18中来控制第一推拉门3和第二推拉门4的开启与关闭,同时门内设置的激光发生器19和激光接收器20则能够检测门框1内部是否有人的存在,从而控制第一推拉门3和第二推拉门4是否常开,而当激光发生器19和激光接收器20出现问题或者人的手指未处于检测范围内第一推拉门3和第二推拉门4开始关闭时,若此时人的手部依然位于自动门的内部,当第一推拉门3与人接触时,人们感受到触感就会立即做出将手抽出的反应,而由于第一推拉门3上设置有滑动条23,滑动条23能够在安装槽21内自由滑动,也就不会影响人们将手抽出,可作为第一重保护,而即使人们没有即使的将手从门中抽出,当滑动条23进入安装槽21的内部一定距离后就会与压力传感器24接触,压力传感器24即可将信号传递至PLC编程控制器18中,PLC编程控制器18就会立刻做出反应控制第一推拉门3与第二推拉门4打开,也能够起到保护防夹的作用。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种具有红外感应的防夹手装置及空调柜机
- 一种防夹手的婴童推车骨架
- 一种防夹手装置
- 一种防夹手的密封推拉门
- 一种防夹手自动门及采用这种自动门的微小型图书馆
- 一种防夹手自动门及售水机