一种工业机器人转动底盘
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及工业机器人技术领域,具体是一种工业机器人转动底盘。
背景技术
随着经济的繁荣昌盛,人们的生活水平的不断提高,生产技术的发展越来越好,人们对自己的时间利用越来越苛刻。生产中,我们对于设备的要求越来越高,希望能够通过对设备的创新来提高工作效率,减少工作时间,提高使用率,使之发挥出最大的价值。随着科技的发展,工业上对机器人的使用越来越频繁,很多企业已经实现了工作车间全机器人的操作,因为其自动化程度高,得到越来越多企业的青睐。
工业机器人在使用时,需要将其放置在底盘表面进行自动化控制,但是现有的机器人用底盘在使用时,只是单一的通过电机对底盘进行旋转或定位控制,底盘稳定性较差,易晃动甚至导致电机发生损坏。
发明内容
本发明的目的在于提供一种工业机器人转动底盘,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种工业机器人转动底盘,包括底座,所述底座内部开设有控制腔,所述底座表面设置有底盘,所述底座内设置有与底盘相互配合的控制机构,所述控制机构包括有旋转组件与定位组件,所述旋转组件包括有电机、转动杆与滑动部,所述电机固定于控制腔内底壁,所述电机输出轴与转动杆固定连接,所述转动杆远离电机的一端延伸出控制腔并且与底盘固定连接,所述滑动部位于底座表面并且与底盘底壁相连接,所述定位组件包括有卡接部与调节部,所述卡接部位于底座顶壁并且与底盘相连接,所述调节部与卡接部相连接,所述控制腔内设置有散热机构,所述散热机构包括有通风孔与吹风组件,所述通风孔位于底座侧壁并且与控制腔连通,所述吹风组件位于控制腔内并且与转动杆相连接。
作为本发明进一步的方案:所述滑动部包括有底座表面开设的环形的滑动槽,所述滑动槽内放置有多组均匀分布的滚珠,所述底盘底壁开设有与滚珠相互配合的环槽。
作为本发明进一步的方案:所述卡接部包括有底座表面开设的多组呈环形分布的伸缩槽,所述伸缩槽内滑动安装有卡接杆,所述底盘底壁开设有多组呈环形分布的并且与卡接杆相互配合的卡接槽,所述调节部位于伸缩槽内并且与卡接杆相连接。
作为本发明进一步的方案:所述调节部包括有伸缩槽侧壁开设的多组竖槽,所述竖槽底壁固定安装有复位弹簧,所述复位弹簧的伸缩端固定连接有与竖槽滑动连接的滑动块,所述滑动块延伸出竖槽并且与卡接杆固定连接,所述卡接杆由磁性材料制成,所述控制腔顶壁固定安装有与卡接杆相互配合的电磁块。
作为本发明进一步的方案:所述吹风组件包括有控制箱内顶壁与内底壁之间转动安装的多组呈环形分布的旋转杆,所述旋转杆表面设置有均匀分布的扇叶,所述旋转杆表面固定安装有旋转齿盘,所述转动杆表面固定安装有与旋转齿盘啮合连接的控制齿盘。
作为本发明进一步的方案:所述通风孔为外低内高的倾斜结构,可以有效防止外部灰尘进入控制腔。
作为本发明再进一步的方案:所述电机外部设置有密封箱。
与现有技术相比,本发明的有益效果是:通过设置由伸缩槽、卡接杆、卡接槽组成的卡接部与由竖槽、复位弹簧、滑动块、电磁块组成的调节部相互配合,可以进一步与电机相互配合对底盘进行位置控制,进一步提高底盘的稳定性,解决了现有的机器人用底盘在使用时,只是单一的通过电机对底盘进行旋转或定位控制,底盘稳定性较差,易晃动甚至导致电机发生损坏的问题。
附图说明
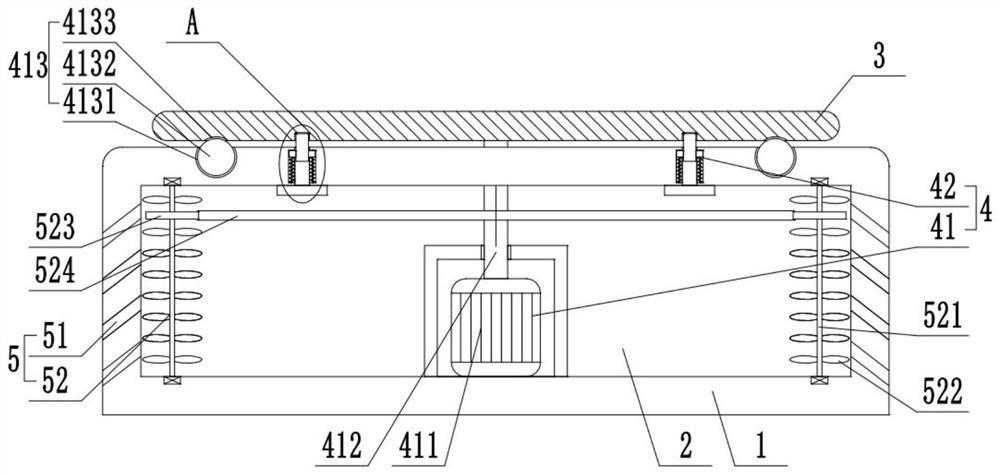
图1为本发明实施例中提供的一种工业机器人转动底盘的结构示意图。
图2为图1中A的放大结构示意图。
图3为本发明实施例中提供的一种工业机器人转动底盘中控制齿盘及其连接结构示意图。
其中:底座1、控制腔2、底盘3、控制机构4、旋转组件41、电机411、转动杆412、滑动部413、滑动槽4131、滚珠4132、环槽4133、定位组件42、卡接部421、伸缩槽4211、卡接杆4212、卡接槽4213、调节部422、竖槽4221、复位弹簧4222、滑动块4223、电磁块4224、散热机构5、通风孔51、吹风组件52、旋转杆521、扇叶522、旋转齿盘523、控制齿盘524。
具体实施方式
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
以下结合具体实施例对本发明的具体实现进行详细描述。
如图1、图2所示,为本发明的一个实施例提供的一种工业机器人转动底盘的结构图,包括底座1,所述底座1内部开设有控制腔2,所述底座1表面设置有底盘3,所述底座1内设置有与底盘3相互配合的控制机构4,所述控制机构4包括有旋转组件41与定位组件42,所述旋转组件41包括有电机411、转动杆412与滑动部413,所述电机411固定于控制腔2内底壁,所述电机411输出轴与转动杆412固定连接,所述转动杆412远离电机411的一端延伸出控制腔2并且与底盘3固定连接,所述滑动部413位于底座1表面并且与底盘3底壁相连接,所述定位组件42包括有卡接部421与调节部422,所述卡接部421位于底座1顶壁并且与底盘3相连接,所述调节部422与卡接部421相连接,所述控制腔2内设置有散热机构5,所述散热机构5包括有通风孔51与吹风组件52,所述通风孔51位于底座1侧壁并且与控制腔2连通,所述吹风组件52位于控制腔2内并且与转动杆412相连接,在使用时,将机器人本体固定安装在底盘3表面,当需要控制机器人本体旋转时,启动电机411带动转动杆412旋转进而带动底盘3在底座1表面转动,在转动过程中,所述滑动部413可以对底盘3进行支撑滑动,有效提高底盘3在转动过程中的稳定性,当底盘3旋转至合适位置后,通过调节部422与卡接部421相互配合可以自动在底座1表面对底盘3的位置进行固定,有效避免底盘3晃动进而导致电机411发生损坏,在控制电机411驱动底盘3旋转的同时,通过吹风组件52与通风孔51相互配合可以有效提高控制腔2的通风散热能力,提高设备整体使用寿命。
如图1所示,作为本发明的一种优选实施例,所述滑动部413包括有底座1表面开设的环形的滑动槽4131,所述滑动槽4131内放置有多组均匀分布的滚珠4132,所述底盘3底壁开设有与滚珠4132相互配合的环槽4133,在底盘3旋转的同时,通过滚珠4132与环槽4133相互配合,不仅可以有效减少底盘3转动时与底座1表面的摩擦力,而且还可以对底盘3进行稳定的支撑。
如图1、图2所示,作为本发明的一种优选实施例,所述卡接部421包括有底座1表面开设的多组呈环形分布的伸缩槽4211,所述伸缩槽4211内滑动安装有卡接杆4212,所述底盘3底壁开设有多组呈环形分布的并且与卡接杆4212相互配合的卡接槽4213,所述调节部422位于伸缩槽4211内并且与卡接杆4212相连接,在使用时,所述底盘3未旋转时,所述卡接杆4212与卡接槽4213相互卡接进而对底盘3进行位置固定,
如图1、图2所示,作为本发明的一种优选实施例,所述调节部422包括有伸缩槽4211侧壁开设的多组竖槽4221,所述竖槽4221底壁固定安装有复位弹簧4222,所述复位弹簧4222的伸缩端固定连接有与竖槽4221滑动连接的滑动块4223,所述滑动块4223延伸出竖槽4221并且与卡接杆4212固定连接,所述卡接杆4212由磁性材料制成,所述控制腔2顶壁固定安装有与卡接杆4212相互配合的电磁块4224,在使用时,对电机411通电控制底盘3旋转的同时对电磁块4224通电,所述电磁块4224通过磁吸力拉动卡接杆4212向下移动进而与卡接槽4213分离,当需要对底盘3进行固定时,对电机411和电磁块4224进行同步断电,所述卡接杆4212失去磁吸力在复位弹簧4222的弹性推力下向上移动进而与卡接槽4213相互卡接。
如图1、图3所示,作为本发明的一种优选实施例,所述吹风组件52包括有控制箱2内顶壁与内底壁之间转动安装的多组呈环形分布的旋转杆521,所述旋转杆521表面设置有均匀分布的扇叶522,所述旋转杆521表面固定安装有旋转齿盘523,所述转动杆412表面固定安装有与旋转齿盘523啮合连接的控制齿盘524,在使用时,通过控制齿盘524与旋转齿盘523啮合传动带动旋转杆521转动进而通过扇叶522加速控制腔2内的空气流动。
如图1所示,作为本发明的一种优选实施例,所述通风孔51为外低内高的倾斜结构,可以有效防止外部灰尘进入控制腔2。
如图1所示,作为本发明的一种优选实施例,所述电机411外部设置有密封箱。
本发明的工作原理是:在使用时,将机器人本体固定安装在底盘3表面,当需要控制机器人本体旋转时,启动电机411带动转动杆412旋转进而带动底盘3在底座1表面转动,在转动过程中,所述滑动部413可以对底盘3进行支撑滑动,有效提高底盘3在转动过程中的稳定性,当底盘3旋转至合适位置后,通过调节部422与卡接部421相互配合可以自动在底座1表面对底盘3的位置进行固定,有效避免底盘3晃动进而导致电机411发生损坏,在控制电机411驱动底盘3旋转的同时,通过吹风组件52与通风孔51相互配合可以有效提高控制腔2的通风散热能力,提高设备整体使用寿命。
上面对本发明的较佳实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
- 一种工业机器人的底盘
- 一种方便安装的工业机器人底盘