用于侧转向的车辆的静液压的行驶驱动器和用于侧转向的移动的作业机械的静液压的驱动器
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及一种用于侧转向的车辆、特别是履带式车辆的静液压的行驶驱动器。本发明还涉及一种用于侧转向的移动的作业机械,如履带式挖掘机、CTL或滑移转向装载机的静液压的驱动器,该驱动器带有这种行驶驱动器并且带有另外的静液压的消耗器。
背景技术
由现有技术已知静液压的行驶驱动器,它们的静液压的初级单元和次级单元通过开放的回路相互连接。在此,开放的回路具有仅一条用作高压管线的工作管线,其将两个单元相互连接。此外,两个单元还分别与共同的料箱连接。
由文献已知,在开放的回路中的行驶驱动器中需要液压存储器,以便稳定化或脱离压力调节并且通过调节排量能调节在次级单元处的转矩并且然后能叠加地调节转速。工作压力由液压存储器的充电状态决定。缺点在于,人们可以仅在极限内可变地设定工作压力并且行驶驱动器不是效率最优的。
在 Korak、Dipp.-Ing.R.的公开文献《带有次级调节机构的静液压的驱动器》(液压教程,卷6,曼内斯曼力士乐股份有限公司,1996年)中公开了一种带有经次级调节的单元的恒压系统。在工作管线上连接有这种液压存储器。
在Findeisen,Dietmar的公开文献《油液压系统》(2006年,斯普林格出版社,柏林,海德堡)中示出了一种带有开放的回路的行驶驱动器,在其工作管线上连接有液压存储器。初级单元是经压力调节的并且次级单元是经转速调节的。
文献EP 0 305 761 A2公开了一种在没有液压存储器的开放回路中的行驶驱动器。初级单元具有流体力学的压力输送流量调节器,其调节恒定不变的工作压力(250bar)。
在开放回路中的这种静液压的行驶驱动器的缺点在于,它们没有为相关的车辆提供转向功能。
发明内容
据此,本发明的任务是,创造一种静液压的行驶驱动器,其为相关的车辆提供转向功能。本发明的任务还在于,创造一种用于移动的作业机械的静液压的驱动器,其提供转向功能并且此外还供应工作液压系统。
这个任务就行驶驱动器而言通过权利要求1的特征组合解决并且就驱动器而言通过权利要求10的特征组合解决。
本发明的另外的有利的设计方案在从属权利要求中说明。
按本发明的静液压的行驶驱动器用于驱动车辆,其中,行驶驱动器具有左边的次级单元和右边的次级单元,它们构造成静液压的能调整的并且能摇摆(durchschwenkbar)的轴向活塞机,并且它们可以通过开放的静液压的回路由共同的静液压的能调整的初级单元供应。初级单元是经压力调节的,两个次级单元则是经转矩调节的。按照本发明,行驶驱动器具有用于车辆的转向功能(坦克转向、滑移转向),因此这种车辆是侧转向的车辆。转向功能通过对两个次级单元的不同的或分开的转矩调节实现。
左边的次级单元指的是与左边的驱动单元、例如左边的链条或者与侧转向的车辆的左轮联接的次级单元。右边的次级单元指的是与右边的驱动单元、例如右边的链条或者与侧转向的车辆的右轮联接的次级单元。
在行驶运行中,初级单元是泵并且两个次级单元是马达。
用按本发明的行驶驱动器能够在没有液压存储器的开放的回路中也实现侧转向。行驶驱动器在装置技术上是简单的,因此仅是耐高压的管线并且在所述三个单元处分别需要仅一个抗压的接头。通过两个次级单元的能摇摆性在没有经控制的制动阀的情况下也实现了制动运行。按本发明的行驶驱动器能灵活地使用并且在此具有高效率。
装备有按本发明的行驶驱动器的车辆可以是坦克或推雪车或移动的作业机械、如滑移转向装载机。
在一种特别优选的扩展设计方案中,由至少一个操作元件(例如操纵杆或加速踏板)的行驶意愿并且由至少一个转向元件(例如操纵杆或转向轮)的转向意愿求出针对每个次级单元的额定转矩。
在一种特别优选的扩展设计方案中,由行驶意愿并且由两个次级单元的相应的实际转速先求出了总的额定转矩。这个模块可以称为“目标-转矩-规划者”。
在求出总的额定转矩时,优选也考虑到了行驶方向开关的信号。
在一种实施例中,由两个次级单元的相应的实际转速求出行驶速度,并且行驶意愿由加速踏板的位置求出。通过综合特性曲线由行驶速度并且由加速踏板的位置求出了总的额定转矩。
可以根据当前的转矩和作业机械的实际转速和额定转速将总的额定转矩减小成减小了的额定转矩。相应的模块可以称为“极限负荷调节器”。当联接到初级单元上的作业机械是柴油机时,可以因此防止柴油挤压。
在按本发明的行驶驱动器的一种特别优选的扩展设计方案中,由总的额定转矩或减小了的额定转矩并且此外还由转向意愿求出的左边的次级单元的额定转矩和右边的次级单元的额定转矩。这个模块可以称为“转矩分布:控制前的转向”。
在一种特别优选的扩展设计方案中,两个次级单元的相应的额定转矩是预控分量。闭合的调节器然后从两个次级单元的额定转速比和实际转速比计算出两个转矩分量,所述转矩分量相加成相应的预控分量,以便因此确定两个最终的转矩预定值。这个模块可以称为“速度比反馈控制”。
在紧接着求出两个次级单元的相应的额定枢转角时,接下来的两个实施例是优选的。
按照第一个实施例,由所述两个额定转矩并且由所测得的实际压力或额定压力求出额定枢转角。
按照第二个实施例,由所述两个最终的转矩预定值和由所测得的实际压力或额定压力求出额定枢转角。这个模块可以称为“转矩产生”。
按本发明的静液压的驱动器设计用于移动的作业机械并且具有前述的带有转向功能的行驶驱动器并且还具有至少一个静液压的消耗器,所述消耗器能通过阀装置供应。在此,至少一个通过阀装置供应的消耗器形成了工作液压系统,工作液压系统平行于两个次级单元地布置在开放的静液压的回路中并且能由初级单元供应。
用按本发明的驱动器能够在没有液压存储器的开放的回路中实现侧转向功能并且供应工作液压系统。所述驱动器在装置技术上是简单的,因此仅需要分支的耐高压的管线并且在所述三个单元处分别需要仅一个抗压的接头。对工作液压系统而言,不需要另外的泵或初级单元。按本发明的驱动器能灵活地使用并且在此具有高效。
在一种节能的扩展设计方案中,静液压的驱动器具有负荷感知系统,该负荷感知系统从一个组中求出最高压力作为所述初级单元的压力调节的额定压力,其中,该组包含了工作液压系统的至少一个消耗器的至少一个当前的负荷压力连同压力差值,并且其中,该组还包含从至少一个操作元件(例如操纵杆或加速踏板)的行驶意愿推断出的压力。
附图中示出了带有转向功能的按本发明的静液压的行驶驱动器的实施例。
附图说明
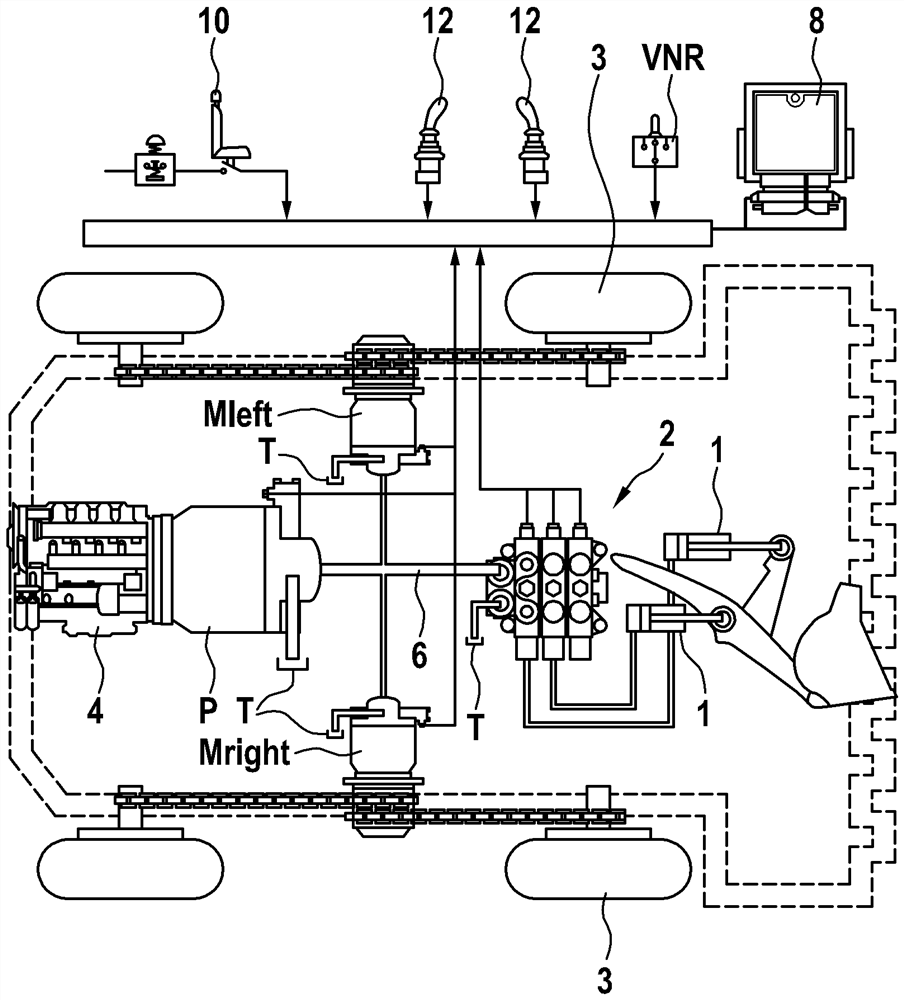
图1在简化图中示出了一种移动的作业机械,其具有带转向功能的按本发明的静液压的行驶驱动器的实施例;
图2示出了图1的静液压的行驶驱动器的实施例的简化的液压线路图;
图3示出了针对静液压的行驶驱动器的实施例的信号流程的图表;
图4示出了静液压的行驶驱动器的实施例的综合特性曲线。
具体实施方式
图1示出了一种移动的作业机械,其构造成滑移转向装载机。滑移转向装载机具有静液压的驱动器,该静液压的驱动器包括带有用于其四个轮3的转向功能的按本发明的静液压的行驶驱动器的实施例。此外,所述驱动器还包括工作液压系统,该工作液压系统在所示实施例中由两个消耗器1和一个阀装置2构成,阀装置构造成带有至少两个用于控制两个消耗器1的阀的阀块。
构造成能调整的轴向活塞机的静液压的初级单元P由在所示实施例中构造成内燃机的驱动机4驱动。通过分支的工作管线6由初级单元P供应左边的次级单元Mleft和右边的次级单元Mright以及阀装置2。两个次级单元Mleft、Mright构造成能调整的和能摇摆的轴向活塞单元,其在行驶运行中用作行驶马达。为此,左边的次级单元Mleft抗扭地联接到两个左轮3上,右边的次级单元Mright则抗扭地联接到两个右轮3上。四个轮3无法从图1所示的位置枢转出来。取而代之的是,为了使移动作业机械转向,一侧的两个轮3要比另一侧的两个轮3驱动得更快。也可能的是,一侧的两个轮3被向前驱动并且另一侧的次级单元Mleft、Mright被摇摆,因而另一侧的两个轮3被向后驱动。因此移动的作业机械可以围绕其竖轴转动。
静液压的驱动器通过电子的控制单元8加以控制,该电子的控制单元在操作者侧与加速踏板10和行驶方向开关VNR及两个操纵杆12信号连接。此外,电子的控制单元8与三个单元P、Mleft、Mright并且与阀装置2的阀信号连接。
图2示出了图1的静液压的驱动器的实施例的简化的液压的线路图。图中示出的是,初级单元P的高压接头通过三重分支的工作管线6与两个次级单元Mleft、Mright的高压接头和阀装置2连接。在低压侧,两个次级单元Mleft、Mright和阀装置2通过共同的分支的料箱管线与料箱T连接。
此外,在三个单元P、Mleft、Mright处布置有相应的枢转角传感器14。在按照本发明经压力调节的初级单元P处则对应地设有压力传感器16。
图3示出了针对前两个附图的静液压的驱动器的静液压的行驶驱动器的实施例的信号流程的图表。模块“目标-转矩-规划者”TTp作为输入具有对应加速踏板10的位置的行驶意愿DriveCmd、行驶方向开关VNR的选择和两个次级单元Mleft、Mright的所测得的实际转速nLeft
模块“目标-转矩-规划者”TTp的输出参量对应额定转矩T
当在初级侧出现了驱动初级单元P的驱动机4(内燃机或电动马达)的超负荷状况时,这个额定转矩T
在下一个步骤中,计算在左边的和右边的次级单元Mleft、Mright之间的额定力矩分布。两个额定力矩T
因为预控由于在模型假设中的干扰和故障几乎是不精确的,所以在闭合的调节回路中的模型“速度-比-反馈-控制”18中修正这种不准确性。转向意愿SteerCmd又作为输入进入,由转向意愿求出额定转速比nratio
用两个最终的转矩预定值T
额定枢转角
两个次级单元Mleft、Mright的驱动器EOC-M和初级单元P的驱动器EOC-P分别输出针对模型20的控制电流I。
图4表明,以何种方式求出总的额定转矩T
公开了一种带有转向功能的静液压的行驶驱动器,转向功能通过两个侧向作用的次级单元(行驶马达)Mleft、Mright实现,所述次级单元由在开放的回路中的共同的初级单元(泵)P供应。初级单元P是经压力调节的。两个次级单元Mleft、Mright是经转矩调节的。通过针对两个次级单元Mleft、Mright的不同的转矩预定值,能根据转向意愿SteerCmd使相关的车辆转向。
还公开了一种用于移动的作业机械的静液压的驱动器,其中,驱动器除了行驶驱动器还具有工作液压系统。这个工作液压系统同样由初级单元P与两个次级单元Mleft、Mright并行地供应。
附图标记列表
1 消耗器
2 阀装置
3 轮
4 驱动机
6 工作管线
8 电子的控制单元
10 加速踏板
12 操纵杆
14 枢转角传感器
16 压力传感器
18 模块“速度-比-反馈-控制”
20 模型
delta-p 压力差值
DriveCmd 行驶意愿
EOC-P 初级单元的驱动器
EOC-M 次级单元的驱动器
I 控制电流
LLC 极限负荷调节器
Mleft 左边的次级单元(马达)
Mright 右边的次级单元(马达)
neng
neng
nLeftact 左边的次级单元的实际转速
nRightact 右边的次级单元的实际转速
nratio
nRatio
P 初级单元(泵)
p
P
p
pLS
SteerCmd 转向意愿
TTp 模型“目标-转矩-规划者”
T
T
T
T
T
T
T
T
T
Td 模型“转矩-分布”
Tg 模型“转矩-产生”
TTp 模型“目标-转矩-规划者”
VNR 行驶方向信号/行驶方向开关
VehSpd 行驶速度
- 静液压的挤压机、用于静液压的挤压机的活塞以及用于静液压的挤压机的缸筒
- 静液压的行驶驱动器、带有行驶驱动器的移动的作业机械和用于数据输入的方法
- 用于确定阀的调节极限的方法、带有阀的液压机和带有液压机的静液压的行驶驱动器