用于太阳翼伸展的基于弹簧柱销锁定的剪刀式伸展机构
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及太阳翼伸展机构领域,尤其涉及用于太阳翼伸展的基于弹簧柱销锁定的剪刀式伸展机构。
背景技术
对航天器而言,太阳翼是主要的供能装置,太阳翼的可展机构在太阳翼展开锁定过程中的可靠性将直接决定任务的成功与否,在国际上,太阳翼伸展机构的锁定方式常常需要通过设计锁定装置,对太阳翼的伸展机构进行锁紧限定。
现有技术中依赖有源驱动锁定装置锁定太阳翼的限位锁定,有源驱动需要安装有源装置,增加了太阳翼的重量,在太空领域增加的重量会产生较大的代价。
为解决上述问题,本发明提供一种用于太阳翼伸展的基于弹簧柱销锁定的剪刀式伸展机构
发明内容
为了解决现有技术中太阳翼伸展机构
无人机在进行数据采集的过程中,控制中心在进行数据获取中需要调控挂载装置的方向和角度,用以获取所需数据,挂载装置在进行调整过程中存在调整失灵的情况,影响数据的采集。为此,本发明提供一种无人机挂载装置的测试工装。
用于太阳翼伸展的基于弹簧柱销锁定的剪刀式伸展机构,包括:左支架座、右支架座、伸展机构、同步机构和锁定机构;
所述同步机构包括左同步组件和右同步组件,所述左同步组件安装于所述左支架座上,所述右同步组件安装于所述右支架座上;
所述伸展机构一端连接所述左同步组件,另一端连接所述右同步组件,所述左同步组件与所述右同步组件用以保证所述伸展机构能够进行伸展,使得太阳翼进行同步伸展;
所述锁定机构设置于所述伸展机构中,用于限定所述伸展机构在展开过程中到达限定位置后不再进行伸展。
在上述方案基础上并且作为上述方案的优选方案:所述伸展机构包括长杆组件和短杆组件;
所述长杆组件包括第一长杆和第二长杆,所述第一长杆与所述第二长杆的中心通过第一铰接件转动连接,所述第一长杆具有第一左端和第一右端,所述第二长杆具有第二左端和第二右端;
所述短杆组件包括第一左短杆、第二左短杆、第一右短杆和第二右短杆,所述第一短杆一端铰接于所述第一左端,另一端连接所述左同步组件,所述第二左短杆一端铰接于所述第二左端,另一端连接所述左同步组件,所述第一右短杆一端铰接于所述第一右端,另一端连接所述右同步组件,所述第二右短杆铰接于所述第二右端,另一端连接所述右同步组件。
在上述方案基础上并且作为上述方案的优选方案:所述锁定机构设置于所述第一左短杆与第一长杆的连接处、所述第一右短杆与所述第二长杆的连接处、所述第二左短杆与所述第一长杆的连接处或第二右短杆与所述第二长杆的连接处。
在上述方案基础上并且作为上述方案的优选方案:所述锁定机构包括柱销、微型弹簧和柱销槽;所述第一短杆上设有用于所述柱销伸缩的柱销孔,所述第一短杆上设有限位座;所述柱销设置于柱销孔内,所述柱销底部具有伸缩槽;所述微型弹簧一端固定于所述限位座上,另一端置于所述伸缩槽内;所述柱销槽位于所述第一长杆下表面;所述第一短杆与所述第一长杆限位配合时,所述柱销位于所述柱销槽内,限定所述第一短杆与所述第一长杆的相对转动。
在上述方案基础上并且作为上述方案的优选方案:所述第一长杆下表面设有倾斜面,所述倾斜面用于配合所述柱销转动;
所述柱销的顶部为弧形结构。
在上述方案基础上并且作为上述方案的优选方案:所述左同步组件包括第一左转动齿和第二左转动齿,所述第一左转动齿与所述第二左转动齿均转动安装于所述左支架座上,且所述第一左转动齿与所述第二左转动齿处于啮合状态,所述第一左转动齿固定连接第一左短杆,所述第二做转动齿固定连接所述第二左短杆。
在上述方案基础上并且作为上述方案的优选方案:所述右同步组件包括第一右转动齿和第二右转动齿,所述第一右转动齿与所述第二右转动齿均转动安装于所述右支架座上,且所述第一右转动齿与所述第二右转动齿处于啮合状态,所述第一右转动齿固定连接第一右短杆,所述第二做转动齿固定连接所述第二右短杆。
在上述方案基础上并且作为上述方案的优选方案:所述左支架座上设有左连接耳,所述连接耳用于所述第一左转动齿与所述第二左转动齿的安装;
所述右支架座上设有右连接耳,所述右连接耳用于所述第一右转动齿与所述第二右转动齿的安装。
在上述方案基础上并且作为上述方案的优选方案:所述第一左短杆、所述第二左短杆、所述第一右短杆和所述第二右短杆在运动过程中保持平行四边形结构。
与现有技术相比,本申请提出的技术方案具有如下的有益效果:
左支架座或右支架座固定安装于航天器上,与之相对应的右支架座或左支架座为活动支座,左同步组件与右同步组件配合使得伸展机构能够进行伸展使得太阳翼进行伸展,当伸展机构伸展到设定位置时,锁定机构限定伸展机构的继续运动;锁定机构为无源驱动,保证伸展机构保持展开的稳定状态,区别于现有的有源驱动,减少了太阳翼的质量。
第一左短杆、第二左短杆、第一右短杆和第二右短杆组成的平行四边形结构,能够使得左同步组件与右同步组件在进行作用的时候,伸展机构能够平稳的进行伸展。
第一长杆与第一左短杆进行转动的过程中,第一长杆上的柱销槽移动到柱销的上方,柱销顶部进入到柱销槽内,限定第一长杆与第一左短杆的转动,进而限定伸展机构的转动。第一长杆下表面压在柱销上,第一长杆与第一左短杆配合转动的过程中,倾斜面能够便于向下压动柱销向下移动,柱销顶部的弧形结构能够有助于第一长杆与第一左短杆的配合转动。
附图说明
下面结合附图和具体实施方式对本发明作进一步详细的说明。
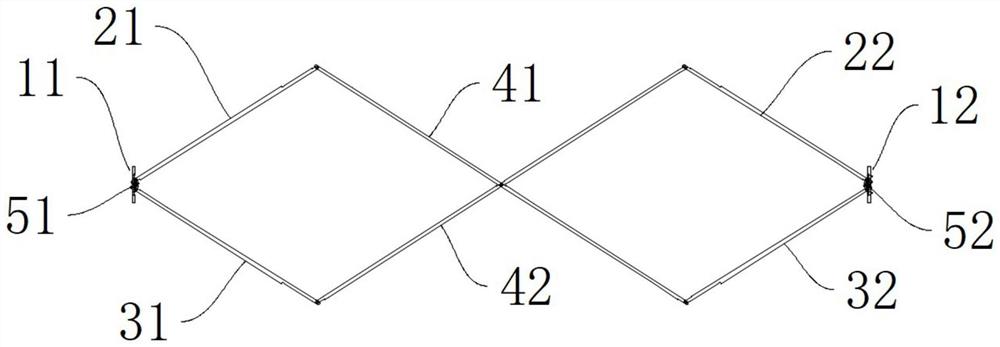
图1为本发明整体结构立体图示意图;
图2为本发明锁定机构剖视图示意图;
图3为本发明第一左短杆与第一长杆连接处放大图示意图;
图4为本发明左同步组件与左支架座配合放大图示意图。
图中:11、左支架座;111、左连接耳;12、右支架座;21、第一左短杆;211、限位座;22、第一右短杆;31、第二左短杆;32、第二右短杆;41、第一长杆;411、倾斜面;42、第二长杆;51、左同步组件;511、第一左转动齿;512、第二左转动齿;52、右同步组件;61、柱销;611、伸缩槽;62、柱销槽;63、微型弹簧;7、第一铰接件。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式进行详细的阐述。然而,领域的普通技术人员可以理解,在本发明的实施方式中,为了使读者更好地理解本申请而提出了许多技术细节。但是,即使没有这些技术细节和基于以下实施方式的种种变化和修改,也可以实现本申请各权利要求保护的技术方案。
为了更好的说明本发明,下面结合附图1-4对本发明进行详细的描述。
参见图1所示,用于太阳翼伸展的基于弹簧柱销61锁定的剪刀式伸展机构,包括:左支架座11、右支架座12、伸展机构、同步机构和锁定机构;其中,同步机构包括左同步组件51和右同步组件52,左同步组件51安装于左支架座11上,右同步组件52安装于右支架座12上;伸展机构一端连接左同步组件51,另一端连接右同步组件52,左同步组件51与右同步组件52用以保证伸展机构能够进行伸展,使得太阳翼进行同步伸展;锁定机构设置于伸展机构中,用于限定伸展机构在展开过程中到达限定位置后不再进行伸展。实际使用过程中,本技术方案的一种安装方式,左支架座11固定安装于航天器上,右支架座12为活动支座,左同步组件51与右同步组件52配合使得伸展机构能够进行伸展使得太阳翼进行伸展,当伸展机构伸展到设定位置时,锁定机构限定伸展机构的继续运动;锁定机构为无源驱动,保证伸展机构保持展开的稳定状态,区别于现有的有源驱动,减少了太阳翼的质量;本技术方案的另一种安装方式,右支架座12固定安装于航天器上,左支架座11为活动支座,左同步组件51与右同步组件52配合使得伸展机构能够进行伸展使得太阳翼进行伸展,当伸展机构伸展到设定位置时,锁定机构限定伸展机构的继续运动;由此,本技术方案不限制左支架座11与右支架座12与航天器的固定,根据实际的需求进行安装,提高本技术方案的使用范围。
参见图1所示,本实施例的具体示例,伸展机构包括长杆组件和短杆组件;其中,长杆组件包括第一长杆41和第二长杆42,第一长杆41与第二长杆42的中心通过第一铰接件7转动连接,第一长杆41具有第一左端和第一右端,第二长杆42具有第二左端和第二右端;其中,短杆组件包括第一左短杆21、第二左短杆31、第一右短杆22和第二右短杆32,第一短杆一端铰接于第一左端,另一端连接左同步组件51,第二左短杆31一端铰接于第二左端,另一端连接左同步组件51,第一右短杆22一端铰接于第一右端,另一端连接右同步组件52,第二右短杆32铰接于第二右端,另一端连接右同步组件52。本技术方案中,第一铰接件7使得第一长杆41与第二长杆42的中心能够进行转动,使得第一长杆41与第二长杆42形成剪刀式结构。具体地,本实施例中的第一铰接件7为第一转动轴,第一转动轴穿过第一长杆41与第二长杆42,第一转动轴使得第一长杆41与第二长杆42能够进行转动。需要说明的是,本技术方案的其他实施例中,长杆组件的长杆个数为二的倍数,每两根长杆为一个交叉单元,相邻的交叉单元之间为铰接在一起,每个交叉单元内的结构采用十字交叉铰接在一起。仍需要说明的是,本实施例中,第一左短杆21、第二左短杆31、第一右短杆22和第二右短杆32在运动过程中保持平行四边形结构。本实施例中的第一左短杆21、第二左短杆31、第一右短杆22和第二右短杆32组成的平行四边形结构,能够使得左同步组件51与右同步组件52在进行作用的时候,伸展机构能够平稳的进行伸展。
实际使用过程中,当左支架座11固定安装于航天器上,右支架座12为活动支座,左同步组件51为主动转动组件,左同步组件51带动第一左短杆21与第二左短杆31进行转动,第一左短杆21与第二左短杆31带动第一长杆41与第二长杆42进行伸展运动,第一长杆41与第二长杆42使得第一右短杆22与第二右短杆32进行伸展运动,右同步组件52使得上述伸展机构能够保持稳定的伸展。
本实施例的具体示例,锁定机构设置于第一左短杆21与第一长杆41的连接处、第一右短杆22与第二长杆42的连接处、第二左短杆31与第一长杆41的连接处或第二右短杆32与第二长杆42的连接处。值得一说的是,在其他的实施例中,锁定机构装置设置于第一长杆41与第二长杆42转动连接处。由此,本技术方案中的锁定机构用于限定伸展机构的转动,使得伸展机构展开到合适位置时,停止转动,保持稳定。
参见图2和图3所示,本实施例的具体示例,锁定机构包括柱销61、微型弹簧63和柱销槽62;第一左短杆21上设有用于柱销61伸缩的柱销61孔,第一左短杆21上设有限位座211;柱销61设置于柱销61孔内,柱销61底部具有伸缩槽611;微型弹簧63一端固定于限位座211上,另一端置于伸缩槽611内;柱销槽62位于第一长杆41下表面;第一左短杆21与第一长杆41限位配合时,柱销61位于柱销槽62内,限定第一左短杆21与第一长杆41的相对转动。实际使用过程中,第一长杆41与第一左短杆21进行转动的过程中,第一长杆41上的柱销槽62移动到柱销61的上方,柱销61顶部进入到柱销槽62内,限定第一长杆41与第一左短杆21的转动,进而限定伸展机构的转动。
参见图3所示,本实施例的具体示例,第一长杆41下表面设有倾斜面411,倾斜面411用于配合柱销61转动;柱销61的顶部为弧形结构。实际使用过程中,第一长杆41下表面压在柱销61上,第一长杆41与第一左短杆21配合转动的过程中,倾斜面411能够便于向下压动柱销61向下移动,柱销61顶部的弧形结构能够有助于第一长杆41与第一左短杆21的配合转动。值得一说的是,在其他的实施例中,根据锁定机构安装的位置不同,倾斜面411设置于与柱销61相配合的接触面上。
参见图4所示,本发明的一种示例,左同步组件51包括第一左转动齿511和第二左转动齿512,第一左转动齿511与第二左转动齿512均转动安装于左支架座11上,且第一左转动齿511与第二左转动齿512处于啮合状态,第一左转动齿511固定连接第一左短杆21,第二做转动齿固定连接第二左短杆31。右同步组件52包括第一右转动齿和第二右转动齿,第一右转动齿与第二右转动齿均转动安装于右支架座12上,且第一右转动齿与第二右转动齿处于啮合状态,第一右转动齿固定连接第一右短杆22,第二做转动齿固定连接第二右短杆32。需要说明的是,右同步组件与右支架座之间的结构图未进行图示,本领域技术人参考左同步组件与左支架座的机构图纸可以理解右同步组件与右支架座之间的结构。
参见图4所示,本实施例的具体示例,左支架座11上设有左连接耳111,连接耳用于第一左转动齿511与第二左转动齿512的安装;右支架座12上设有右连接耳,右连接耳用于第一右转动齿与第二右转动齿的安装。
上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,以及对于上述实施例一个或多个进行组合实施例,本领域技术人员可以在权利要求的范围内做出各种变化或修改或组合,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
- 一种基于储能装置展开的剪刀式伸展机构
- 一种基于弹簧和锁定组件的伸缩式转向柱机构