一种近地遥感卫星自主任务规划地影预报方法及装置
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及航天器自主任务规划技术领域,特别涉及一种近地遥感卫星自主任务规划地影预报方法及装置,用于星上自主规划安排飞行任务时计算未来指定规划周期内卫星每个轨道圈的进出地影时间。
背景技术
相比于传统的以遥控遥测为主要手段的卫星运行管理,星上自主任务规划具有充分发挥卫星使用效能、提高卫星响应紧急任务能力、大幅减少对地面测控的依赖和支持多星自主协同配合执行对地观测任务等诸多优势,将成为智能卫星/星群的一项标配技术。自主任务规划过程中,对未来指定规划周期内卫星每个轨道圈进出地影的时间进行预报是执行任务调度和编排前必不可少的关键环节,原因在于:(1)在进/出影时刻卫星一般会切换飞行状态(对日转对地或对地转对日),任务规划需要避免在进出影时间附近编排观测或回放任务;(2)有些载荷的工作条件受地影的影响,例如可见光相机一般只能在阳照区成像;(3)卫星处于地影区内部和外部执行任务的姿态机动动作选择不同,例如:执行完观测任务且后续空闲时间充足时,阳照区卫星应转对日充电,地影区应转为对地零姿态;执行回放任务时,阳照区卫星需转为对地零姿态,地影区则不需要姿态机动。可见,准确的地影预报是任务规划编排结果正确的基础;同时,自主任务规划具有高实时性要求,地影预报的执行速度越快越好。
由于星载处理器的计算和存储能力受限,传统采用固定步长对阴影条件进行解算的方法由于计算量过大无法适用。贾向华等人提出了一种近地轨道卫星的地影预报星上算法(贾向华,徐明,陈罗婧.近地轨道卫星的地影预报算法[J],宇航学报,2016,第37卷第1期)。该算法计算量相对较小,但是面向实际工程应用存在的不足表现在:(1)其在迭代计算和解析求解过程中均包含大量三角函数的运算,计算量依旧偏大,现有星载处理器使用该算法预报一天的地影时间耗时将超过20s,无法满足自主任务规划更高实时性的要求;(2)其预报结果的方差较大且与预报时长不直接相关,预报精度有待进一步提高。
发明内容
本发明解决的技术问题是:针对目前现有技术中星上预报卫星地影时间算法的计算时效性和精度无法满足星上自主任务规划需求的问题,提出了一种近地遥感卫星自主任务规划地影预报方法及装置。
本发明的技术方案为:一种近地遥感卫星自主任务规划地影预报方法,包括:(1)确定自主任务规划的规划周期为[T
进一步的,步骤(2)中所述计算t
(2a)确定t
(2b)通过计算太阳在惯性系的轨道根数计算t
其中,轨道坐标系的原点为地心O,ξ轴与升交点N的矢径重合,ζ轴与轨道动量矩矢量重合,η轴由右手规则确定,ξη平面为轨道面;
(2c)基于
其中,
(2d)计算出影点时刻卫星位置矢量r与s夹角
其中,R是地球平均半径;
(2e)基于cosβ和
(2f)计算s在轨道面的投影与ON的夹角α,0≤α<2π,
(2g)基于u
t
t
其中,卫星轨道角速度
进一步的,步骤(3)中,所述通过二分法分别迭代求解出影时刻精确值t
(3a)根据进影点C、出影点D太阳-地球-卫星之间的相对位置关系,得到:
建立t
其中,
(3b)设置t
(3c)计算t
(3d)若t
进一步的,所述精度水平ε=0.5s。
进一步的,对于500~700km轨道,所述卫星阴影区的最大时长T
一种近地遥感卫星自主任务规划地影预报装置,包括:初始化模块、出进影时刻估计模块、出进影时刻确定模块、初始化时刻确定模块、任务规划模块,其中,初始化模块,其确定自主任务规划的规划周期为[T
进一步的,所述出进影时刻估计模块计算t
(2a)确定t
(2b)通过计算太阳在惯性系的轨道根数进而计算t
其中,轨道坐标系的原点为地心O,ξ轴与升交点N的矢径重合,ζ轴与轨道动量矩矢量重合,η轴由右手规则确定,ξη平面为轨道面;
(2c)基于
其中,
(2d)计算出影点时刻卫星位置矢量r与s夹角
其中,R是地球平均半径;
(2e)基于cosβ和
(2f)计算s在轨道面的投影与ON的夹角α,0≤α<2π,
(2g)基于u
t
t
其中,卫星轨道角速度
进一步的,所述出进影时刻确定模块通过二分法分别迭代求解出影时刻精确值t
(3a)根据进影点C、出影点D太阳-地球-卫星之间的相对位置关系,得到:
建立t
其中,
(3b)设置t
(3c)计算t
(3d)若t
进一步的,所述精度水平ε=0.5s。
进一步的,对于500~700km轨道,所述卫星阴影区的最大时长T
本发明与现有技术相比的优点在于:
(1)本发明提供了一种近地遥感卫星自主任务规划地影快速预报方法及装置,基于太阳-地球-卫星三者的相对位置关系创新性的建立了进/出影时间的估算模型,对于卫星的每一个轨道圈,首先,通过估算模型获得出影和进影的估算值,然后分别以两个估算值为中心确定搜索区间,再使用二分法迭代求解进/出影时刻的满足的非线性方程,得到进出影时间的精确结果。该方法不包含复杂的三角函数运算,且通过提前预估的方式有效的压缩了迭代求解区间长度,计算量显著减小,在现有星载处理器上预报一天的地影时间耗时约0.2s,计算速度比现有星上预报算法提升了约100倍,能够满足星上自主任务规划高实时性要求。
(2)本发明方法最终迭代求解的精度主要取决于卫星轨道二阶摄动解析外推的精度,在一天内进出影点的计算结果与真实值偏差可以保持在2s以内,计算精度比现有星上预报算法提高了近一倍,能够满足星上自主任务规划计算时间精度的要求。
本发明已在多颗近地遥感卫星的自主任务规划中实现在轨应用,验证了方法的可行性和有效性,工程技术易实现,因此具有实用性。
附图说明
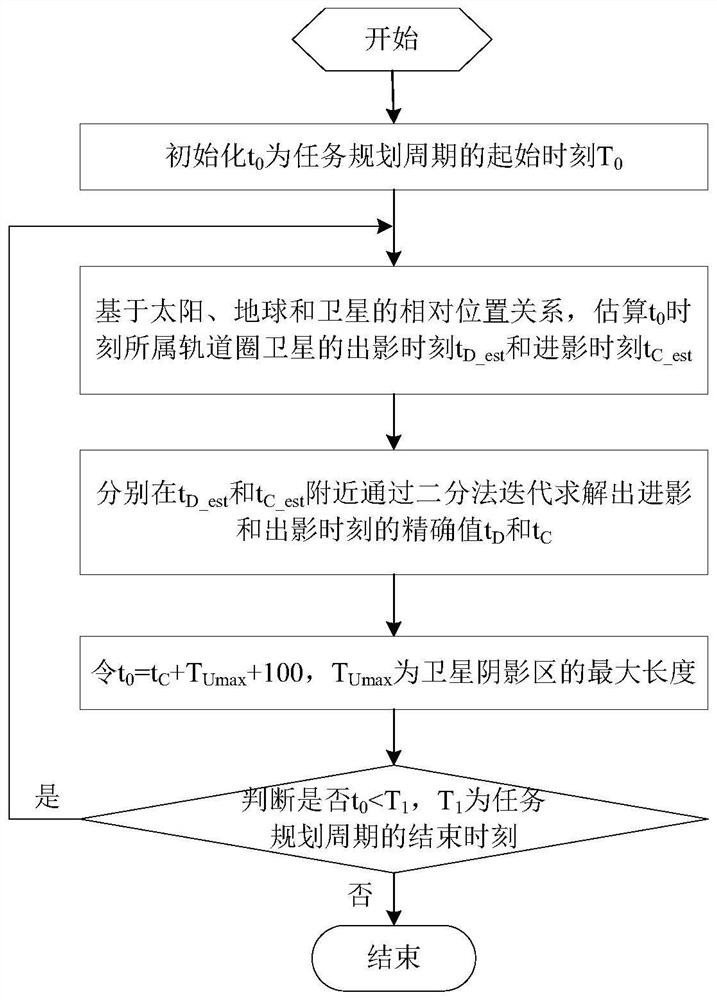
图1为发明提供的地影快速预报步骤流程框图;
图2为发明提供的圆柱阴影模型示意图;
图3为发明提供的进出影时间预估模型示意图。
具体实施方式
以下对本发明的具体实施方式做出详细说明。
本发明提出一种近地遥感卫星自主任务规划地影预报方法及装置,能够对进出地影时间进行快速预报。
假设卫星为近地轨道遥感卫星,将太阳光视为平行光,基于太阳-地球-卫星的空间位置关系建立的圆柱阴影模型如图2所示。O点为地心,C点为进影点,D点为出影点,S为地心惯性坐标系下的太阳方向矢量,DQ与地球表面相切,Q为切点,r是地心惯性坐标系下的卫星位置矢量,R是地球平均半径,其值为6371.004km。
卫星轨道圈定义为:相邻轨道圈之间以出影点D作为分界点,每个轨道圈以卫星的出影点D作为起始点。
已知自主任务规划的规划周期为[T
(1)将t
(2)基于太阳-地球-卫星的相对位置关系,估算t
(2a)基于地面上注或从GPS获取的最新的卫星惯性瞬时轨道根数,计算卫星的轨道平均根数,再通过解析法外推出t
(2b)通过计算太阳在惯性系的轨道根数,进而可获得t
如图3所示,轨道坐标系的原点为地心O,ξ轴与升交点N的矢径重合,ζ轴与轨道动量矩矢量重合,η轴由右手规则确定,ξη平面即为轨道面;
(2c)使用步骤(2b)得到的
其中,
(2d)计算出影点D时刻卫星位置矢量r与s夹角
(2e)基于步骤(2c)和步骤(2d)的计算结果,根据球面三角公式计算s在轨道面的投影与OD的夹角估值u
(2f)计算s在轨道面的投影与ON的夹角α(0≤α<2π):
(2g)基于步骤(2e)和步骤(2f)的结果计算出影时刻估计值t
t
t
其中,卫星轨道角速度
(3)在步骤(2)获得的出影时刻估计值t
(3a)如图2所示,根据C、D点太阳-地球-卫星之间的相对位置关系,可得:
因此,建立t
其中,
(3b)设置t
(3c)计算t
(3d)若t
(4)令t
(5)由于要计算规划周期[T0,T1]内所有轨道圈的地影,判断是否满足t
本发明还提出一种近地遥感卫星自主任务规划地影预报装置,其包括:初始化模块、出进影时刻估计模块、出进影时刻确定模块、初始化时刻确定模块、任务规划模块。
初始化模块,其确定自主任务规划的规划周期为[T
出进影时刻估计模块,其基于太阳-地球-卫星的相对位置关系,计算t
出进影时刻确定模块,其基于所述出影时刻估计值t
初始化时刻确定模块,其将出影时刻的精确值t
任务规划模块,其判断最终初始化时刻t
出进影时刻估计模块计算t
(2a)确定t
(2b)通过计算太阳在惯性系的轨道根数进而计算t
其中,轨道坐标系的原点为地心O,ξ轴与升交点N的矢径重合,ζ轴与轨道动量矩矢量重合,η轴由右手规则确定,ξη平面即为轨道面。
(2c)基于
其中,
(2d)计算出影点时刻卫星位置矢量r与s夹角
其中,R是地球平均半径。
(2e)基于cosβ和
(2f)计算s在轨道面的投影与ON的夹角α,0≤α<2π:
(2g)基于u
t
t
其中,卫星轨道角速度
出进影时刻确定模块通过二分法分别迭代求解出影时刻精确值t
(3a)根据进影点C、出影点D太阳-地球-卫星之间的相对位置关系,得到:
建立t
其中,
(3b)设置t
(3c)计算t
(3d)若t
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
- 一种具有多种规划模式的对地遥感卫星自主任务规划方法
- 一种遥感卫星自主任务筹划方法及装置
- 一种遥感卫星自主任务筹划方法及装置