复杂红外探测成像系统光电对心方法及装配方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及光电探测技术领域,尤其涉及一种复杂红外探测成像系统光电对心方法。
背景技术
区别于传统的光电探测设备,红外探测成像系统的NETD、探测距离、探测灵敏度等参量,对其内部光学系统的MTF、透过率以及光电中心一致性要求较高。特别是复杂折返式光学系统,这种光学系统多用于高集成度、小体积的红外探测成像设备,光学视场与探测靶面间的冗余十分有限,因此格外依赖光电对心调试,否则会直接影响红外探测成像系统的探测性能。目前,复杂红外探测成像系统高精度光电对心调试仍是行业的技术难题之一。
发明内容
(一)要解决的技术问题
本发明要解决的技术问题是解决复杂红外探测成像系统难以实现高精度光电对心的问题,以提高红外探测成像系统的探测性能。
(二)技术方案
为了解决上述技术问题,本发明提供了一种复杂红外探测成像系统光电对心方法,该方法包括:
在红外探测成像系统的光学系统与红外探测器分离的情况下,对所述红外探测器进行非均匀校正;
获得所述光学系统对应的传递函数;
将所述光学系统与所述红外探测器装配后,获得多帧待处理图像;
基于多帧所述待处理图像进行帧叠加处理,得到抑制噪声的灰度分布图;
基于所述灰度分布图,确定N个特征点的信息;特征点的信息包括特征点的特征值及在所述灰度分布图中的坐标;N为不小于20的正整数;
基于确定的多个特征点的信息,建立所述灰度分布图与所述传递函数之间的映射关系;
基于所述传递函数的最值以及所述灰度分布图与所述传递函数之间的映射关系,确定灰度分布最值点的坐标;
根据灰度分布最值点的坐标和所述红外探测器的电子学中心位置,进行红外探测成像系统的光电对心。
可选地,所述对所述红外探测器进行非均匀校正,包括:
在无所述光学系统的情况下,只通过所述红外探测器对均匀黑体成像,获得本底图像;
基于本底图像的均匀性,对所述红外探测器进行校正,至本底图像的均匀性符合预设指标。
可选地,所述获得所述光学系统对应的传递函数,包括:
在无所述红外探测器的情况下,通过传函仪,测得所述光学系统的传递函数。
可选地,所述基于多帧所述待处理图像进行帧叠加处理,包括:
将n帧所述待处理图像的灰度值按坐标对应叠加后,求平均值,作为所述灰度分布图的灰度值;其中,n≥100。
可选地,所述基于所述灰度分布图,确定N个特征点的信息,包括:
基于所述灰度分布图,分别计算行向和列向的梯度数据;
对行向和列向,分别基于对应的梯度数据进行从大到小排序,选出前M个梯度值;M≥10;
将选出的2M个梯度值所在点作为特征点,梯度值为对应的特征值。
可选地,所述确定灰度分布最值点的坐标,包括:
若所述光学系统为全透式光学系统,则确定灰度分布中最大值在所述灰度分布图的坐标;
若所述光学系统为折返式光学系统,则确定灰度分布中最小值在所述灰度分布图的坐标。
可选地,所述进行红外探测成像系统的光电对心,包括:
比较所述红外探测器的电子学靶面尺寸和所述光学系统的光学视场尺寸;
若电子校准对心损失光学视场,则调整所述光学系统与所述红外探测器的相对位置,否则采用电子校准,令灰度分布最值点的坐标和所述红外探测器的电子学中心位置重合。
可选地,所述基于所述灰度分布图,确定N个特征点的信息,还包括:
基于所述灰度分布图,分别对行向和列向的灰度值进行从大到小排序,选出前L个灰度值;L≥5;
将选出的2L个灰度值所在点也作为特征点,灰度值为对应的特征值。
可选地,在所述获得多帧待处理图像之后,所述基于多帧所述待处理图像进行帧叠加之前,还包括:
对每帧待处理图像进行滤波处理。
本发明还提供了一种复杂红外探测成像系统装配方法,该方法在装配光学系统与红外探测器的阶段,采用如上述任一项所述的复杂红外探测成像系统光电对心方法校准光轴与电子学中心位置。
(三)有益效果
本发明的上述技术方案具有如下优点:本发明提供了一种复杂红外探测成像系统光电对心方法及装配方法;本发明在光学系统与红外探测器分离的情况下对红外探测器进行非均匀校正,再装配光学系统,此时再成像,非均匀性完全由光学系统引入,通过实际获取的灰度分布结合光学系统所对应的传递函数,确定光学系统的光轴在图像中的准确位置,最终实现红外探测成像系统的光电对心。本发明能够在光电集成阶段完成对光学系统的光轴与红外探测器的电子学成像中心高精度校准调试,从而提高红外探测成像系统的探测性能,特别适用于采用复杂折返式光学系统的红外探测成像系统。
附图说明
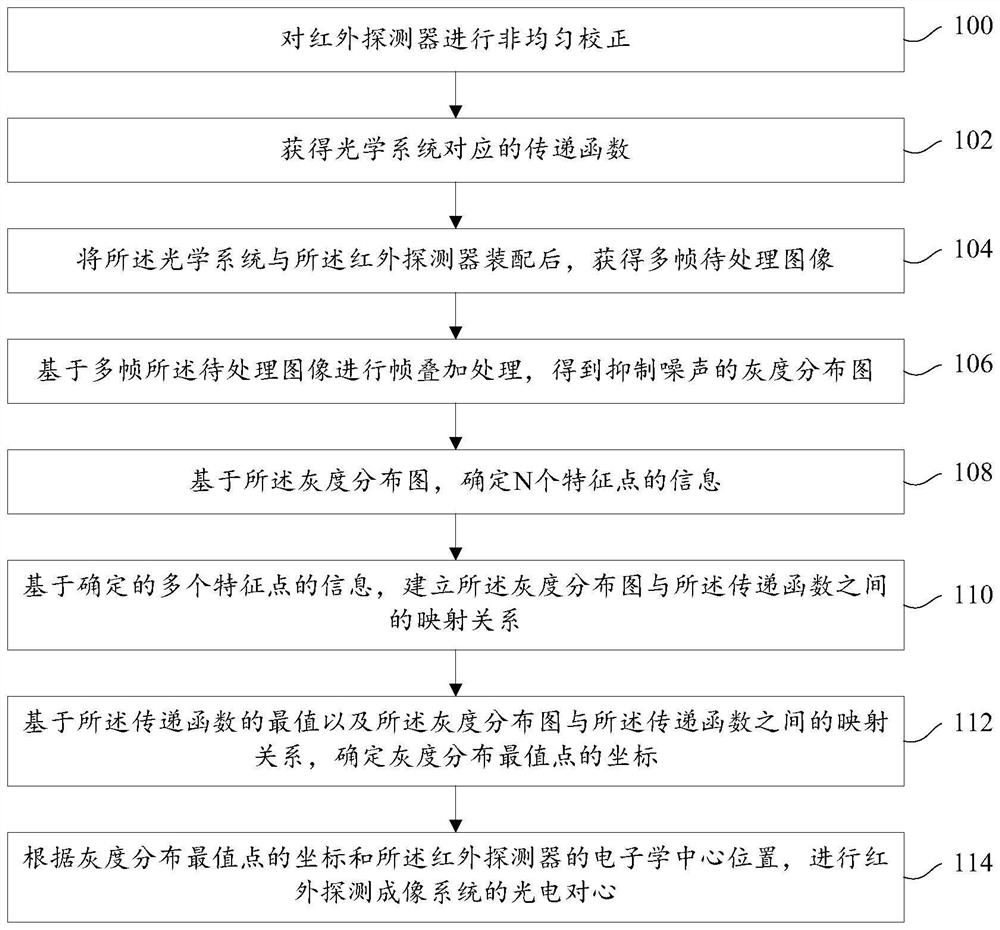
图1是本发明实施例中一种复杂红外探测成像系统光电对心方法步骤示意图;
图2是本发明实施例中一幅红外探测成像系统在装配光学系统后获得的待处理图像;
图3是本发明实施例中一幅红外探测成像系统获得图像对应的三维分布灰度图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
如前所述,红外探测成像系统对于光电中心一致性要求较高,特别是采用复杂折返式光学系统的红外探测成像系统,集成度高、体积小,光学视场与探测靶面间的冗余十分有限,因此格外需要进行高精度光电对心调试,否则会直接影响红外探测成像系统的探测性能。现有技术对于复杂红外探测成像系统光电对心调试精度偏低,也就是说,光学系统的光轴无法严格对准红外探测器的电子学成像中心(也称电子学中心位置),往往偏差会有十几甚至几十像素。有鉴于此,本发明提供了一种适用于复杂红外探测成像系统的光电对心方法,该方法利用实际成像的灰度分布与光学系统的传递函数定位光轴,可有效提高光轴与电子学成像中心校准调试的精度。
如图1所示,本发明实施例提供的一种复杂红外探测成像系统光电对心方法,包括:
步骤100,在红外探测成像系统的光学系统与红外探测器分离的情况下,对所述红外探测器进行非均匀校正;
步骤102,获得所述光学系统对应的传递函数;
步骤104,将所述光学系统与所述红外探测器装配后,获得多帧待处理图像;
步骤106,基于多帧所述待处理图像进行帧叠加处理,得到抑制噪声的灰度分布图;
步骤108,基于所述灰度分布图,确定N个特征点的信息;其中,特征点的信息包括特征点的特征值及特征点在所述灰度分布图中的坐标(也称像素坐标);N为不小于20的正整数;
步骤110,基于确定的多个特征点的信息,建立所述灰度分布图与所述传递函数之间的映射关系;
此步骤中,基于多个特征点的信息建立映射关系,可以使用全部N个特征点,也可以舍弃其中某些特征点,避免引入噪声等因素产生的错误特征点信息,但同时所用的特征点不应过少,否则可能出现映射关系不准确的情况;优选使用10个以上特征点的特征建立映射关系;
步骤112,基于所述传递函数的最值以及所述灰度分布图与所述传递函数之间的映射关系,确定灰度分布最值点的坐标;
步骤114,根据灰度分布最值点的坐标和所述红外探测器的电子学中心位置,进行红外探测成像系统的光电对心。
本发明提供的复杂红外探测成像系统光电对心方法先对红外探测成像系统中的红外探测器进行自身非均匀校正,再装配上光学系统获得图像,由于所述红外探测器已经经过非均匀校正,装配光学系统后,成像所得的待处理图像的非均匀性完全由光学系统引入,也就是说,此时,图像中的能量分布完全依赖光学系统的传递,如图2和图3所示;考虑到噪声等因素会产生干扰,图像中的光轴所在最值点和其附近的像素点灰度相差可能不大,如果直接筛选图像的灰度值来确定最值点,容易产生较大的偏差,无法提高对心精度,本发明通过实际获取的灰度分布结合光学系统所对应的传递函数来确定图像的最值点,也就是光学系统的光轴在图像中的位置,最终实现红外探测成像系统的光电对心,可有效提高光轴与电子学成像中心校准调试的精度,通常可调至偏差不大于2像素。
可选地,步骤100包括:
在无所述光学系统的情况下,只通过所述红外探测器对均匀黑体成像,获得本底图像;
基于获得的本底图像的均匀性,对所述红外探测器进行校正,至本底图像的均匀性符合预设指标。
上述实施例通过红外探测器对均匀黑体成像得到本底图像,通过计算本底图像的均匀性指标,可评估红外探测器的均匀性,再根据本底图像进行校正,直至红外探测器的均匀性符合预设要求。
可选地,步骤102包括:
在无所述红外探测器的情况下,通过传函仪,测得所述光学系统的传递函数。
在其他实施例中,光学系统的传递函数也可通过其他方式获得,比如调用存储数据等。光学系统的传递函数能够反映平行光经过光学系统后的能量分布,传递函数的能量分布趋势与实际所得的灰度图分布趋势是一致的,通过连续的传递函数,有利于精确定位光轴所在点。
步骤104即获取装配后的复杂红外探测成像系统成像结果。可选地,在步骤104之后,步骤106之前,还包括:
对每帧待处理图像进行滤波处理。
通过滤波处理,同样有助于降低待处理图像中的噪声干扰,提高对心精度。
可选地,步骤106包括:
将n帧所述待处理图像的灰度值按坐标对应叠加后,求平均值,作为所述灰度分布图的灰度值;其中,n≥100;相应的表达式为:
其中,X
上述实施例对大量待处理图像的灰度值进行叠加、平滑处理,能够有效的抑制噪声。
可选地,步骤108包括:
基于所述灰度分布图,分别计算行向和列向的梯度数据;
对行向和列向,分别基于对应的梯度数据进行从大到小排序,选出前M个梯度值;M≥10;
将选出的2M个梯度值所在点作为特征点,梯度值为对应的特征值。M更优选为30或50。
进一步地,计算行向或列向的梯度数据,采用如下相邻两像素移位迭代处理的方式,即:
其中,k
上述实施例以所述灰度分布图中梯度分布作为特征,相应地,步骤110中根据梯度分布特征建立灰度分布图和传递函数之间的映射关系,也就是通过比对较明显的灰度变化趋势,建立行向灰度分布与行向传递函数的对应关系,以及列向灰度分布与列向传递函数的对应关系,以便后续利用传递函数精确定位最值点。
进一步地,步骤108还包括:
基于所述灰度分布图,分别对行向和列向的灰度值进行从大到小排序,选出前L个灰度值;L≥5;
将选出的2L个灰度值所在点也作为特征点,灰度值为对应的特征值。
上述实施例采用梯度分布再结合灰度最大值点作为特征,综合确定灰度分布趋势,有利于提高建立灰度分布与传递函数的对应关系的准确性。
可选地,步骤112中,若所述光学系统为全透式光学系统,则确定灰度分布中最大值在所述灰度分布图的坐标;
若所述光学系统为折返式光学系统,则确定灰度分布中最小值在所述灰度分布图的坐标。
步骤112将传递函数的最值点对应到灰度分布图中,以确定光轴所在点的坐标。对于全透式光学系统,其光轴对应透过能量的最低点,而对于折返式光学系统,其光轴对应透过能量的最高点,确定该最值点的坐标,也就确定了光轴相对电子学靶面的位置。
可选地,步骤114包括:
比较所述红外探测器的电子学靶面尺寸和所述光学系统的光学视场尺寸;
若电子校准对心损失光学视场,则调整所述光学系统与所述红外探测器的相对位置,否则采用电子校准,令灰度分布最值点的坐标和所述红外探测器的电子学中心位置重合。
若设计上电子学靶面相较光学视场有较大余量,则可以采用电子校准令灰度分布最值点的坐标和所述红外探测器的电子学中心位置对准,若光学视场与电子学靶面间的冗余十分有限,通过电子校准会使得一部分光学视场无法被电子学靶面接收到,就有必要调整所述光学系统与所述红外探测器的相对位置来实现对心。
本发明还提供了一种复杂红外探测成像系统装配方法,该方法在装配光学系统与红外探测器的阶段,采用如上述任一项所述的复杂红外探测成像系统光电对心方法校准光轴与电子学中心位置。
综上所述,本发明提供了一种复杂红外探测成像系统光电对心方法及装配方法,本发明通过实际获取的灰度分布结合光学系统所对应的传递函数,确定光学系统的光轴在图像中的位置,即反映了光学系统透过能量分布的灰度分布最值点的坐标,通过将灰度分布最值点的坐标和所述红外探测器的电子学中心位置重合,能够有效地实现灰度分布最值点的坐标和所述红外探测器的电子学中心位置重合,特别是对于采用复杂折返式光学系统的红外探测成像系统,可实现高精度光电对心调试,进而提高红外探测成像系统的性能。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- PbSe光敏薄膜红外光电探测芯片及其制备方法、红外光电探测器
- 一种基于光电摄像管的红外激光光斑探测成像装置及方法