一种导航信号优先级处理方法
文献发布时间:2023-06-19 19:16:40
技术领域
本发明涉及船舶导航技术领域,具体涉及一种导航信号优先级处理方法。
背景技术
随着船舶全球航行区域的快速扩大,航道开发趋于完备,对安全航道的重视度越来越高,引起业界人士的广泛研究和关注,其安全航行更是航运发展的基础和前提条件。经统计可知,目前针对船舶航行条件测试有经验法和船舶导航系统判断方法:
经验法:通过高薪聘请经验丰富的船长给予过航指导,人为经验判别安全航行路线。这种方法目前主要应用于电子设备不完善的航行段或在特殊情况下的应急处理。
船舶导航系统法:船舶导航系统是用于船舶上,能自动识别安全通行航道的电子设备。船舶导航系统作为整个航行过程中的控制核心,对船舶安全航行起到决定性的作用。目前的船舶导航系统一般都采用信息化的集中管理方式运作,基本实现了整个系统的自动化智能化航行数据处理
在船舶上的各种导航设备中,都会收到大量通过船舶上网络或其它通讯设备传来的各种导航信息,在收到的同一类导航信息中,如位置信息,信息源分为GPS1、GPS2、北斗1、北斗2、劳兰、电子海图等设备,面对如此多的导航信息,如何能够快速的找到最合适的信息源的数据,保证处理导航信息的可靠性、稳定性也成为了急需解决的技术问题。
发明内容
针对现有技术存在的上述不足,本发明要解决的技术问题是:如何提供一种能够在接收到的多种导航信号中快速找到最合适的信息源的数据,进而保证处理导航信息的可靠性和稳定性的导航信号优先级处理方法。
为了解决上述技术问题,本发明采用如下技术方案:
一种导航信号优先级处理方法,包括以下步骤:
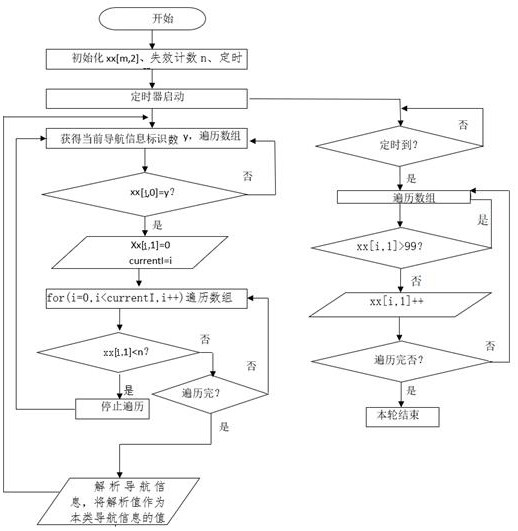
步骤1)定义并初始化二维整数型数组xx[m,2]、失效计数n和定时器定时时间t;
步骤2)定时器启动;
步骤3)在定时器定时时间t内按行遍历二维整数型数组xx[m,2],并判断二维整数型数组xx[m,2]中第i行第二列的值xx[i,1]是否大于第一设定值,若是,则第i行第二列的值xx[i,1]保持不变;若否,则第i行第二列的值xx[i,1]加1;
步骤4)在实时接收并处理导航信息的程序块里,按行遍历二维整数型数组xx[m,2],判断第i行第一列的值xx[i,0]是否与当前接收的导航信息的标志数相等,若否则继续判断第i+1行第一列的值xx[i+1,0]是否与当前接收的导航信息的标志数相等;若是则将第i行第二列的值xx[i,1]赋值为0,并将此时的i值赋予给变量currentI;
步骤5)根据步骤4)得到的currentI值,遍历并判断二维整数型数组xx[m,2]中行数小于currentI的各行第二列的值是否小于失效计数n,若是则返回执行步骤4),若否则执行步骤6);
步骤6)设置二维整数型数组xx[m,2]中行数为currentI的导航设备的导航信息为当前导航信息;
步骤7)本轮处理结束并返回执行步骤4)。
优选的,步骤1)中,二维整数型数组xx[m,2]中m为需要排优先级的导航设备的设备数,且二维整数型数组xx[m,2]的各行按导航设备的优先级从高向低排列,二维整数型数组xx[m,2]中第i行第一列的值xx[i,0]表示该导航设备的标志数,且初始化二维整数型数组xx[m,2]中第i行第二列的值xx[i,1]均为第二设定值。
优选的,步骤1)中,失效计数n指在n秒内未收到某导航设备的导航信息时,则该导航设备的导航信息无效。
优选的,步骤1)中,定时器定时时间t由各导航设备发送导航信息的最小间隔时间除以k得到,且1≤k≤10。
优选的,步骤3)中,按For(int i=0,i 优选的,步骤4)中,设定当前接收的导航信息的标志数为y,按For(int i=0,i 优选的,步骤5)中,按For(int i=0,i 优选的,第一设定值为99,第二设定值为90,失效计数3≤n≤5。 优选的,步骤1)中的导航设备的设备数为5,且分别为GPS1、GPS2、北斗1、北斗2和综合导航设备,且各导航设备优先级由高到低依次为GPS1、GPS2、北斗1、北斗2、综合导航设备。 优选的,定时器定时时间400ms≤t≤600ms。 与现有技术相比,本发明具有以下优点: (1)本发明能够对光学罗经、中低惯导等各系列不同优先级导航设备的导航信息进行有效控制,保证在某时刻使用最合适的信息源的数据,保证处理导航信息的可靠性、稳定性。 (2)本发明能方便快捷实现多种不同类型不同优先级导航设备导航信息的统一处理,降低程序复杂度。 (3)本发明只需通过设计软件就可得到实现,不需要对传统设备结构方法作出修改,在保证产品成本的基础上,提高了产品可靠性。 附图说明 图1为本发明导航信号优先级处理方法的流程图。 具体实施方式 为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。除非另作定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。 本发明专利申请说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,除非上下文清楚地指明其它情况,否则单数形式的“一个”“一”或者“该”等类似词语也不表示数量限制,而是表示存在至少一个。“包括”或者“包含”等类似的词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的特征、整体、步骤、操作、元素和/或组件,并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。“上”“下”“左”“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。 如附图1所示,一种导航信号优先级处理方法,包括以下步骤: 步骤1)定义并初始化二维整数型数组xx[m,2]、失效计数n和定时器定时时间t。 具体的,二维整数型数组xx[m,2]为具有m行2列的数组,且无论哪一维都是从0开始取下标,所以第一维的范围是0到m-1,第二维的范围是0和1。同时,m为需要排优先级的导航设备的设备数,且二维整数型数组xx[m,2]的各行按导航设备的优先级从高向低排列,即行越小,优先级越高,二维整数型数组xx[m,2]中第i行第一列的值xx[i,0]表示该导航设备的标志数,如xx[0,0]=1,表示GPS1,最高优先级,xx[1,0]=2,表示北斗1,第二优先级;且初始化二维整数型数组xx[m,2]中第i行第二列的值xx[i,1]均为第二设定值,具体的,本方案中第二设定值为90,且第一设定值为99,即二维整数型数组xx[m,2]中第二列xx[i,1]中将每个初值均设定为一个接近于上限(即第一设定值)的值,本具体实施例中为 90,单位为秒,在定时器定时时间t内,如果该导航设备的数据没有变化,其值加1,几次就直接到上限不用无限加下去,表示肯定不会使用这个导航设备的值,该数组也可以理解为代表某导航设备上个刷新时间与当前时间的差值,为0表示已经即时刷新,当达到99时代表已经长时间没有刷新,即不会用到该导航设备的值。 具体的,失效计数n指在n秒内未收到某导航设备的导航信息时,则该导航设备的导航信息无效。本具体实施例中,失效计数n取为5,表示5秒没收到某导航设备的导航信号则该导航设备的导航信息无效。当然在具体实施时,也可以根据需要取为3秒、4秒均可。 具体的,定时器定时时间t由各导航设备发送导航信息的最小间隔时间除以k得到,且1≤k≤10。 步骤2)定时器启动。 步骤3)在定时器定时时间t内按行遍历二维整数型数组xx[m,2],并判断二维整数型数组xx[m,2]中第i行第二列的值xx[i,1]是否大于第一设定值,若是,则第i行第二列的值xx[i,1]保持不变;若否,则第i行第二列的值xx[i,1]加1。 具体的,按For(int i=0,i 步骤4)在实时接收并处理导航信息的程序块里,按行遍历二维整数型数组xx[m,2],判断第i行第一列的值xx[i,0]是否与当前接收的导航信息的标志数相等,若否则继续判断第i+1行第一列的值xx[i+1,0]是否与当前接收的导航信息的标志数相等,直到将所有的行遍历完成;若是则将第i行第二列的值xx[i,1]赋值为0(通过赋值为0代表该导航设备的导航信息已经实时更新),并将此时的i值赋予给变量currentI。 具体的,设定当前接收的导航信息的标志数为y,按For(int i=0,i 步骤5)根据步骤4)得到的currentI值,遍历并判断二维整数型数组xx[m,2]中行数小于currentI的各行第二列的值是否小于失效计数n,若是则返回执行步骤4),若否则执行步骤6)。 具体的,按For(int i=0,i 步骤6)设置二维整数型数组xx[m,2]中行数为currentI的导航设备的导航信息为当前导航信息; 步骤7)本轮处理结束并返回执行步骤4)。 在本实施例中,步骤1)中的导航设备的设备数为5,且分别为GPS1、GPS2、北斗1、北斗2和综合导航设备,且各导航设备优先级由高到低依次为GPS1、GPS2、北斗1、北斗2、综合导航设备。 在本实施例中,定时器定时时间400ms≤t≤600ms。 下面,以一个具体实施例为例对本发明的方法进行说明: 网络通讯中本设备收五种导航设备的位置信息:GPS1、GPS2、北斗1、北斗2、综合导航设备,其通讯格式中指定第三字节为信息数,假定第三字节15表示GPS1,16表示GPS2,17表示北斗1、18表示北斗2、19表示综合导航设备,假定约定优先级顺序为GPS1、GPS2、北斗1、北斗2、综合导航设备,包括如下步骤: 步骤1)初始化设备优先级二维整数型数组posNum[5,2]={(15,90), (16,90),(17,90),(18,90), (19,90)},初始化失效计数n=5,初始化定时器定时时间t设置为500ms; 步骤2)定时器启动; 步骤3)在定时器里按for(i=0,i<5,i++)遍历posNum[5,2],判断各行第二列的值posNum[i,1]是否大于等于99,如是,则该行第二列的值posNum [i,1]保持不变;若否,则该行第二列的值posNum [i,1]加1; 步骤4)在实时接收并处理导航信息的程序块里,提取当前导航信息第三字节recvData[2],按for(i=0,i<5,i++)遍历posNum[5,2],判断posNum [i,0]是否与当前接收的导航信息的标志数recvData[2]相等,若否则取下一行继续比较;若是则取posNum [i,1]为0,并将此时的i值赋予给变量currentI,并跳出遍历转步骤5); 步骤5)按for(i=0,i 步骤6)设置当前处理设备的导航信息为当前本类导航信息; 步骤7)本轮处理结束,转步骤4)。 与现有技术相比,本发明能够对光学罗经、中低惯导等各系列不同优先级导航设备的导航信息进行有效控制,保证在某时刻使用最合适的信息源的数据,保证处理导航信息的可靠性、稳定性。本发明能方便快捷实现多种不同类型不同优先级导航设备导航信息的统一处理,降低程序复杂度。本发明只需通过设计软件就可得到实现,不需要对传统设备结构方法作出修改,在保证产品成本的基础上,提高了产品可靠性。 最后需要说明的是,以上实施例仅用以说明本发明的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本发明的权利要求范围当中。
- 导航信号处理方法、装置、终端设备及存储介质
- 基于芯片级原子钟的导航卫星长码信号接收机处理方法
- 一种导航卫星信号的处理装置和信号处理方法
- 一种导航卫星信号的处理装置和信号处理方法