重心切换机构及无人机
文献发布时间:2023-06-19 19:21:53
技术领域
本申请涉及无人机技术领域,特别是涉及一种重心切换机构及无人机。
背景技术
用于抓捕的无人机主要包括无人机主体和负载发射器(例如网枪负载),在飞无人机行过程中,负载发射器发射后,无人机重量减轻,使无人机的重心发生变化,从而导致无人机飞行姿态失控。目前无人机主要通过加设大扭力电机来克服因重心偏位所产生的力矩,但是加设大扭力电机反而加重了无人机的整体重量,并不能直接解决无人机因重量发生变化而导致的使重心偏移。
发明内容
基于此,有必要针对上述问题,提供一种重心切换机构及无人机,该重心切换机构减轻无人机整体重量,调整无人机的重心位置,实现无人机飞行姿态稳定。
本发明提供了一种重心切换机构,用于将负载发射器安装于无人机主体,以形成无人机,包括:
用于被设置于该无人机主体的安装组件,包括安装座和可活动设置于所述安装座的限位件;
用于被设置于该负载发射器的滑动组件,所述滑动组件与所述安装组件滑动配合,所述滑动组件设有用于限制所述限位件的第一限位槽、用于限制所述限位件的第二限位槽以及连通第一限位槽和第二限位槽的第一导向槽;所述第一导向槽用于引导所述限位件从所述第一限位槽滑入所述第二限位槽;以及
复位组件,所述复位组件被设置于所述安装组件和所述滑动组件之间,用于相对于所述安装组件对所述滑动组件施加复位力;
所述滑动组件用于被该负载发射器在发射负载时所产生的反作用力驱动以相对于该安装组件滑动,以使所述限位件从所述第一限位槽滑入所述第一导向槽;所述限位件在所述复位组件的作用下从所述第一导向槽滑入所述第二限位槽,用于使该无人机的重心位置在负载发射前后保持不变。
如此设置,负载发射器在发射后,由于重量减小,导致无人机重心偏移,难以保证无人机稳定飞行,通过加设重心切换机构来解决无人机因重量变化而导致的飞行姿态不稳定。其中,负载发射器发射后产生反作用力,推动滑动组件相对于安装组件进行滑动,将第一限位槽与第一导向槽连通,使限位件从第一限位槽滑入第一导向槽,此时无人机的重心发生变化,将第一导向槽与第二限位槽连通,复位组件将限位件从第一导向槽滑入第二限位槽,无人机的重心调整到电机轴心上。
在本发明的一个实施例中,所述滑动组件进一步设有连通第二限位槽和第一限位槽的第二导向槽,所述第二导向槽用于引导所述限位件从所述第二限位槽滑入所述第一限位槽。
如此设置,负载发射器进行再次发射,无人机重量增加,无人机重心发生变化,需要调整滑动组件的位置,将第二导向槽连通于第二限位槽和第一限位槽,手动将限位件从第二限位槽滑入第一限位槽,使无人机的重心调整到电机轴心上。
在本发明的一个实施例中,所述第一限位槽具有与所述第二导向槽连通的第一滑入端和与所述第一导向槽连通的第一滑出端,所述第一滑入端和所述第一滑出端均朝着远离所述第二限位槽的方向倾斜延伸;
所述第二限位槽具有朝着靠近所述第一限位槽的方向倾斜延伸的第二滑入端与第二滑出端,所述第二滑出端连通于所述第二导向槽,所述第二滑入端连通于所述第一导向槽。
如此设置,调整重心切换机构的位置时,限位件难以保证单向滑动于第一限位槽与第二限位槽,负载发射器发射时,将限位件滑入第一限位槽,第一滑入端和第一滑出端均朝着远离第二限位槽的方向倾斜延伸,限制限位件从第一限位槽反向滑回第二导向槽,负载发射器发射后,复位组件将限位件从第一导向槽滑入第二限位槽,第二滑入端与第二滑出端均朝着靠近第一限位槽的方向倾斜延伸,限制限位件从第二限位槽反向滑回第一导向槽。
在本发明的一个实施例中,所述第二滑入端的槽底高于所述第二滑出端的槽底。
如此设置,负载发射器发射后无人机重心偏移,复位组件需将限位件从第一导向槽滑入第二限位槽,并将限位件限位于与第二滑入端相邻的第二滑出端,防止限位件反向滑回第一导向槽。
在本发明的一个实施例中,所述第二导向槽上与所述第一滑入端相邻的槽底高于所述第一滑入端的槽底。
如此设置,负载发射器进行发射时,手动将限位件从第二限位槽滑入第一限位槽,并将限位件首次滑入并限制于与第二导向槽相邻的第一滑入端,防止手动松开后,限位件反向滑回第二限位槽。
在本发明的一个实施例中,所述第一滑入端的槽底高于所述第一滑出端的槽底。
如此设置,负载发射器发射时,将限位件滑入并限制于与第一滑入端相邻的第一滑出端,防止限位件反向滑回第二导向槽。
在本发明的一个实施例中,所述第一滑出端的槽底高于第一导向槽上与所述第一滑出端相邻的槽底。
如此设置,负载发射器发射后,反作用力使限位件从第一限位槽滑入与第一滑出端相邻的第一导向槽,防止限位件反向滑回第一限位槽。
在本发明的一个实施例中,所述第一导向槽靠近所述第一滑出端的槽的深度至所述第二滑入端靠近所述第二滑出端的槽的深度逐渐变小,所述第二滑出端靠近所述第二滑入端的槽的深度至所述第一滑出端靠近所述第一导向槽的槽的深度逐渐变大。
如此设置,负载发射器发射后,限位件从第一限位槽滑入第一导向槽,无人机重心偏移,通过复位组件将限位件滑入第二限位槽,防止限位件在反作用力下直接从第一导向槽滑入第二限位槽,另外手动将限位件从第二限位槽滑入第一滑入端,防止限位件在手动松开后反向滑回第二限位槽。
在本发明的一个实施例中,所述安装座开设有沿着垂直于所述滑动组件的滑动方向延伸的滑动槽,所述限位件可滑动地设置于所述滑动槽。
如此设置,调整重心切换机构的位置时,限位件需要在垂直于负载发射的方向上进行滑动,将限位件设置于滑动槽中,便于无人机重心切换时,限位件一端滑动于滑动槽,另一端滑动于第一限位槽、第二限位槽及第一导向槽、第二导向槽。
在本发明的一个实施例中,所述限位件还包括滑块、限位柱以及偏压件,所述滑块可滑动地安装于所述滑动槽,所述偏压件被设置于所述限位柱和所述滑块之间,用于朝向所述滑动组件偏压所述限位柱,以使所述限位柱始终抵于所述第一限位槽、所述第二限位槽以及所述第一导向槽的槽底。
如此设置,第一限位槽、第二限位槽及第一导向槽、第二导向槽的深度不同,限位件在滑动时需伸缩上下距离,通过偏压件偏压限位柱,将限位柱始终抵于第一限位槽、第二限位槽以及第一导向槽的槽底。
本发明还提供一种无人机,包括无人机主体;负载发射器;以及上述任一所述的重心切换机构,重心切换机构将负载发射器安装于无人机主体。
相比现有技术,本发明提供的重心切换机构通过设置限位件滑动于限位槽与导向槽来改变无人机的重心位置,以在负载发射器发射后,调整无人机重心位置,保证无人机飞行稳定。
附图说明
图1为本申请的一个实施例提供的负载发射器的结构示意图;
图2为本申请的上述实施例提供的负载发射器中重心切换机构处于第一重心的状态示意图;
图3为本申请的上述实施例提供的重心切换机构处于第二重心的状态示意图;
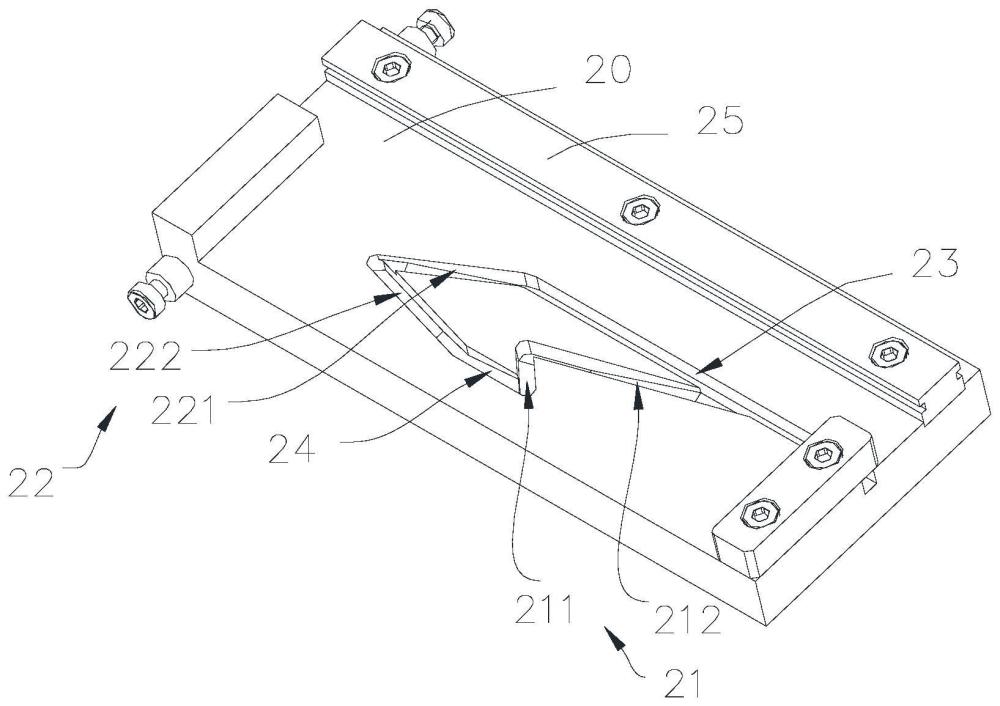
图4为本申请的上述实施例提供的重心切换机构中滑动组件的结构示意图;
图5为本申请的上述实施例提供的重心切换机构中安装组件的结构示意图;
图6为本申请的上述实施例提供的安装组件的剖视示意图;
图7为本申请的上述实施例提供的重心切换机构中限位件的滑动路径示意图。
附图标记:10、安装组件;11、安装座;111、滑动槽;12、限位件;121、滑块;122、限位柱;123、偏压件;13、导块;20、滑动组件;21、第一限位槽;211、第一滑入端;212、第一滑出端;22、第二限位槽;221、第二滑入端;222、第二滑出端;23、第一导向槽;24、第二导向槽;25、导轨;30、复位组件;31、弹簧;32、第一挂钩;33、第二挂钩;40、负载发射器。
具体实施方式
下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
需要说明的是,当组件被称为“装设于”另一个组件,它可以直接装设在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。当一个组件被认为是“固定于”另一个组件,它可以是直接固定在另一个组件上或者可能同时存在居中组件。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“或/及”包括一个或多个相关的所列项目的任意的和所有的。
本发明提供了一种重心切换机构,该重心切换机构用于将负载发射器安装于无人机主体,以形成无人机,能够解决无人机负载发射器发射后因重心变化,导致的飞行姿态失效,通过调整无人机的重心,实现飞行姿态稳定。
参考图1至图7所示,该重心切换机构用于将负载发射器40安装于无人机主体,以形成无人机,该重心切换机构包括安装组件10、滑动组件20及复位组件30,且安装组件10设置于该无人机主体上,滑动组件20设置于该负载发射器40上,通过滑动组件20与安装组件10滑动配合来调整无人机的重心,其中,安装组件10包括安装座11和限位件12,限位件12可活动地设置于安装座11,用于调整无人机的重心,滑动组件20设有第一限位槽21与第二限位槽22,用于限制限位件12,使得重心切换时可及时调整限位件12的位置;另外,滑动组件20设有第一导向槽23及第二导向槽24,第一导向槽23连通第一限位槽21和第二限位槽22,以将限位件12从第一限位槽21滑入第二限位槽22,第二导向槽24连通第一限位槽21和第二限位槽22,以将限位件12从第二限位槽22滑入第一限位槽21。
具体地,如图2至图6所示,该负载发射器40在发射后产生反作用力,驱使滑动组件20相对于安装组件10进行滑动,使得限位件12从第一限位槽21滑入第一导向槽23,复位组件30设置于安装组件10和滑动组件20之间,用于相对于安装组件10对滑动组件20施加复位力,使得限位件12在复位组件30的作用下从第一导向槽23滑入第二限位槽22,保证该无人机的重心位置在负载发射前后保持不变,实现无人机飞行稳定。
优选地,如图2和图3所示,复位组件30包括弹簧31、第一挂钩32及第二挂钩33,其中第一挂钩32固设于安装组件10的一端,第二挂钩33固设于滑动组件20上与第一挂钩32相反方向的一端,弹簧31连接于第一挂钩32与第二挂钩33,以通过弹簧31的拉伸与回缩,使安装组件10与滑动组件20进行滑动配合。
参考图2至图7所示,安装组件10与滑动组件20进行滑动配合时,限位件12单向滑动于滑动组件20上,具体地,当负载发射器40发射后,产生反作用力,驱使限位件12进行滑动,使得限位件12从第一限位槽21滑入第一导向槽23,然后通过复位组件30施加复位力,将限位件12从第一导向槽23引入第二限位槽22,将无人机的重心调整至电机轴心上,使得无人机飞行稳定。
在一实施例中,如图4和图7所示,滑动组件设有第二导向槽24,且第二导向槽24连通第二限位槽22和第一限位槽21,用以在弹簧31拉当负载发射器40发射前,手动将限位件12从第二限位槽22引导至第一限位槽21中,将无人机的重心调整至电机轴心上。
具体地,如图4和图7所示,第一限位槽21具有第一滑入端211和第一滑出端212,第一滑入端211连通于第二导向槽24,以将限位件12从第二导向槽24引入第一限位槽21,第一滑出端212连通于第一导向槽23,以在负载发射后的反作用力下将限位件12从第一限位槽21引入第一导向槽23,第一滑入端211和第一滑出端212均朝着远离第二限位槽22的方向倾斜延伸,且第二导向槽24朝着负载发射方向延伸,以在负载发射器40发射前,通过手动将限位件12从第二限位槽22引入第一限位槽21,使得负载发射器处于任意角度时,无人机飞行姿态稳定。
另外,如图4和图7所示,第二限位槽22具有第二滑入端221和第二滑出端222,第二滑入端221连通于第一导向槽23,以在复位组件30施加复位力时,将限位件12从第一导向槽23引入第二限位槽22,第二滑出端222连通于第二导向槽24,限位件12在弹簧31作用力下从第二限位槽22滑入第一限位槽21,第二滑入端221和第二滑出端222朝着靠近第一限位槽21的方向倾斜延伸,便于限位件12在手动施力下从第二限位槽22滑入第一限位槽21。
优选地,第二滑入端221的槽底高于第二滑出端222的槽底,使得在第二限位槽22的第二滑入端221与第二滑出端222连接处形成限位台阶,以在复位组件30施加复位力,在弹簧31的拉伸作用下,限位件12从第一导向槽23滑入第二限位槽22的限位台阶处,并且不会反向滑回第一导向槽23。
优选地,第二导向槽24上与第一滑入端211相邻的槽底高于第一滑入端211的槽底,使得第二导向槽24上与第一滑入端211相邻处形成限位台阶,以在手动作用下,使得限位件12从第二限位槽22滑入第二导向槽24上与第一滑入端211相邻处的限位台阶,并且限位件12不会反向滑回第二限位槽22。
优选地,第一滑入端211的槽底高于第一滑出端212的槽底,使得第一限位槽21的第一滑入端211与第一滑出端212连接处形成限位台阶,以在负载发射器40发射前,使限位件12调整到第一限位槽21的第一滑入端211与第一滑出端212连接处形成限位台阶处,并且限位件12不会反向滑回第二导向槽24。
优选地,第一滑出端212的槽底高于第一导向槽23上与第一滑出端212相邻的槽底,使得第一滑出端212与第一导向槽23相邻处形成限位台阶,以在负载发射器40发射后,使限位件12从第一限位槽21滑入第一滑出端212与第一导向槽23相邻处形成限位台阶处,并且限位件12不会反向滑回第一限位槽21。
更优选地,第一导向槽23靠近第一滑出端212的槽的深度至第二滑入端221靠近第二滑出端222的槽的深度逐渐变小,避免限位件12在负载发射器40发射时产生的反作用力下沿着第一导向槽23直接滑入第二限位槽22,此时通过复位组件30中弹簧31的拉伸作用将限位件12从第一导向槽23滑入第二限位槽22,进而进行无人机的重心调整;另外,第二滑出端222靠近第二滑入端221的槽的深度至第一滑出端212靠近第一导向槽23的槽的深度逐渐变大,使得限位件12从第二限位槽22滑入第一限位槽21,使无人机的重心在电机轴心上,实现无人机任意角度飞行稳定。
在一实施例中,如图5和图6所示,安装座11开设有滑动槽111,且滑动槽111沿着垂直于滑动组件20的滑动方向延伸,限位件12可滑动地设置于滑动槽111,以通过限位件12在第一限位槽21、第二限位槽22、第一导向槽23及第二导向槽24中滑动来调整无人机的重心,实现无人机飞行稳定。
优选地,滑动槽111的长度大于或等于第一导向槽23至第二导向槽24的垂直距离,便于限位件12在滑动组件20的限位槽与导向槽进行滑动时,安装组件10与滑动组件20不会在负载发射方向的垂直方向产生滑动。
在一实施例中,如图5和图6所示,限位件12还包括滑块121、限位柱122以及偏压件123,且偏压件123被设置于限位柱122和滑块121之间,滑块121可滑动地安装于滑动槽111,以在限位件12滑动于第一限位槽21、第二限位槽22、第一导向槽23及第二导向槽24中时,偏压件123朝向滑动组件20偏压限位柱122,使得限位柱122始终抵于第一限位槽21、第二限位槽22、第一导向槽23及第二导向槽24的槽底。
优选地,偏压件123为弹簧件,滑块121的宽度大于滑动槽111的宽度,避免滑块121从滑动槽111中滑出,但不限于此,限位件12可以为弹簧阻尼器,对限位件12滑动过程中,还能降低限位件12的振幅。
在一实施例中,如图4和图7所示,滑动组件20设有沿着负载发射方向延伸的导轨25,安装组件10设有导块13,以在滑动组件20与安装组件10滑动配合时,导块13直线滑动于导轨25上,使得限位件12在第一限位槽21、第二限位槽22、第一导向槽23及第二导向槽24中滑动时,稳固滑动组件20与安装组件10的滑动位置,避免出现偏向滑动。
本发明还提供一种无人机,包括无人机主体、负载发射器40及以上实施例所述重心切换机构,该重心切换机构将负载发射器40安装于无人机主体。
本发明提供的重心切换机构工作原理如下:如图7所示,首先,当负载发射器40发射时产生反作用力,限位件12从第一限位槽21滑入第一导向槽23中,此时复位组件30施加复位力,限位件12从第一导向槽23滑入第二限位槽22中,负载发射器40在未发射状态下处于第二限位槽22中,通过手动滑动,安装组件10上限位件12从第二限位槽经过第二导向槽24滑入第一限位槽21中,将无人机的重心调整到电机轴心上,使该无人机的重心在负载发射器40发射前后保持不变,实现无人机任意角度飞行稳定。
以上所述实施方式的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施方式中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
本技术领域的普通技术人员应当认识到,以上的实施方式仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上实施方式所作的适当改变和变化都落在本发明要求保护的范围。
- 一种无人机动力电源切换电路板及其切换方法
- 一种排气切换机构和切换排气的方法
- 一种工位切换机构及其工位切换方法
- 一种适用于无人机的重心配平机构
- 一种避免重心不稳的大型无人机的承载机构