一种新能源汽车无人驾驶控制系统
文献发布时间:2023-06-19 19:23:34
技术领域
本发明涉及汽车无人驾驶控制系统技术领域,尤其涉及一种新能源汽车无人驾驶控制系统。
背景技术
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的无人驾驶控制来实现无人驾驶的目的;无人驾驶汽车通过感知道路环境,自动规划行车路线并控制车辆到达预定目标;无人驾驶汽车的驾驶安全性是重中之重,如何保持车距或与障碍物之间的距离,如何是汽车行驶在相对更安全的区域中是需要考虑的问题。
经检索,中国专利申请号为CN201810502627.5的专利,公开了一种无人驾驶系统及电动汽车,涉及汽车安全技术领域,所述无人驾驶系统包括:通信连接的主控装置和辅控装置;其中,所述主控装置用于获取所述车辆所处预设范围内的行驶路况信息,根据所述行驶路况信息,规划所述车辆的行驶路径,并控制所述车辆依据所述行驶路径自动行驶;所述辅控装置用于获取所述车辆所处所述预设范围内的行驶路况信息、卫星地图信息和交通警示信息,根据所述行驶路况信息、卫星地图信息和交通警示信息,生成行驶场景信息;并根据所述行驶场景信息,监测所述车辆的当前行驶状态,向所述主控装置输出行驶路径调整信号。上述专利中的无人驾驶系统存在以下不足:在矫正汽车行驶路径方面还有所不足,不能够对汽车在其安全驾驶区域内进行微调,来使其行驶在相对更安全的区域中。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种新能源汽车无人驾驶控制系统。
为了实现上述目的,本发明采用了如下技术方案:
一种新能源汽车无人驾驶控制系统,包括:
GPS模块,用于接收GPS信号;
路径规划模块,用于规划驾驶路径;
监测模块,用于监测车周情况;
分析模块,基于规划的路径和监测模块的监测信息,分析车辆的驾驶区域;
矫正模块,矫正模块基于分析结果,生成矫正方案;
控制模块,控制模块根据矫正方案,控制和调整车辆。
优选的:所述监测模块包括多个传感器监测单元和图像采集单元,监测模块用于捕捉周围物体信息和地面信息。
进一步的:所述分析模块分析的车辆的驾驶区域包括左侧极限距离X1,右侧极限距离X2,前侧极限距离Y1,后侧极限距离Y2;车辆的驾驶区域小于等于四个极限点连线所围成的区域,四个极限点的距离分别为左前极限点(X1,Y1)、右前极限点(X2,Y1)、右后极限点(X2,Y2)、左后极限点(X1,Y2)。
进一步优选的:所述分析模块以左后极限点为原点建立距离系,车体在距离系的距离为(Xn,Yn);分析模块判断车体与驾驶中心之间的偏移值,横向偏移值为:0.5*X2-Xn;纵向偏移值为0.5*Y1-Yn。
作为本发明一种优选的:所述分析模块以左后极限点为原点建立距离系,车体在距离系的距离为(Xn,Yn);分析模块判断车体与驾驶中心之间的偏移值,横向偏移值为:0.5*X2-Xn;纵向偏移值为0.4*Y1-Yn。
作为本发明进一步优选的:所述前侧极限距离Y1受前方车辆和本车车速的影响;
设本车车速为Vn,警戒车速为Vy,前方车辆距离本车的距离为Y1’,后方车辆距离本车的距离为Y2’,前方基础警戒距离为Y3,后方基础警戒距离为Y4,基础预警时间为T;
当Y1’≥Y3,Vn>Vy时;Y1=(Vn-Vy)*T+Y3;
当Y1’≥Y3,Vn<Vy时;Y1=Y3;
当Y1’≤Y3,Y1=Y1’;
当Y2’≥Y4时,Y2=Y4;
当Y2’≤Y4,Y1=Y2’。
作为本发明再进一步的方案:所述前方基础警戒距离Y3为10m,后方基础警戒距离为Y4为10m。
在前述方案的基础上:所述前方基础警戒距离Y3为9m,后方基础警戒距离为Y4为6m。
在前述方案的基础上优选的:所述矫正模块根据横向偏移和纵向偏移值生成矫正方案,控制模块根据矫正方案,通过调整驾驶方向,改变驾驶速度的方式,对汽车的位置向靠近驾驶中心的方向进行矫正。
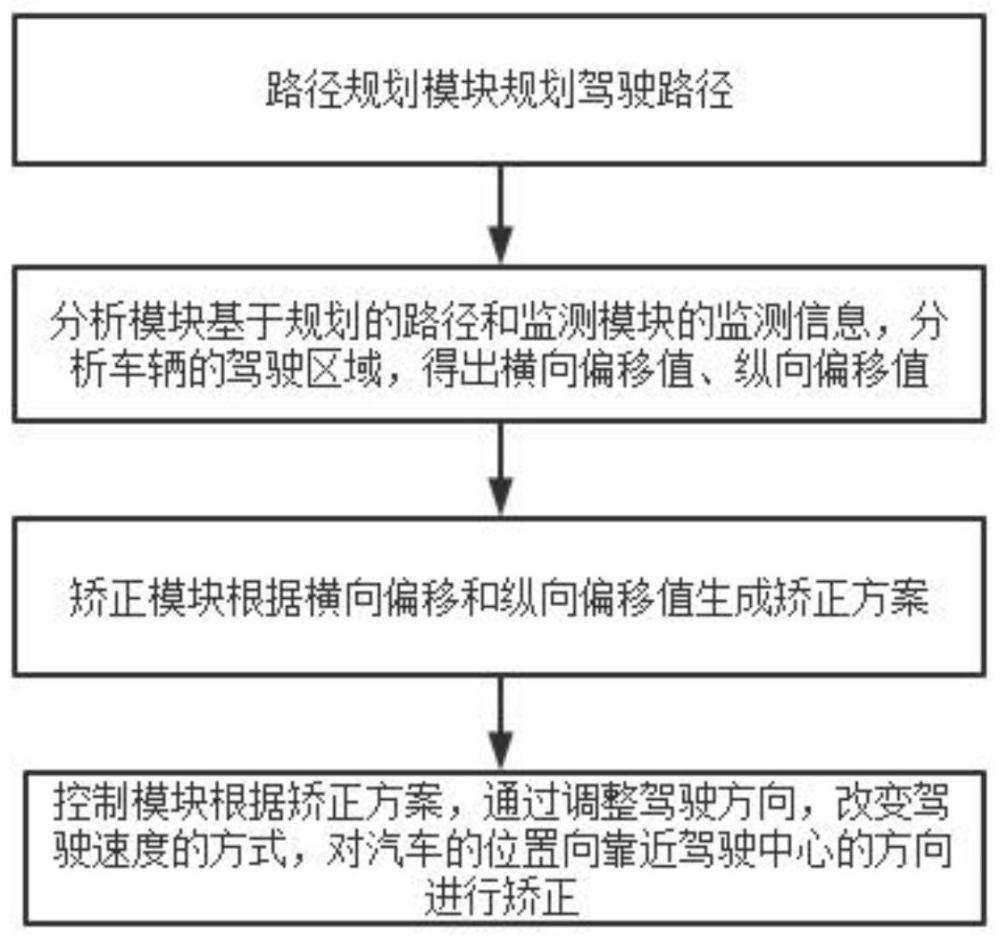
在前述方案的基础上优选的:所述无人驾驶控制系统的控制方法包括如下步骤:
S1:路径规划模块规划驾驶路径;
S2:分析模块基于规划的路径和监测模块的监测信息,分析车辆的驾驶区域,得出横向偏移值、纵向偏移值;
S3:矫正模块根据横向偏移和纵向偏移值生成矫正方案;
S4:控制模块根据矫正方案,通过调整驾驶方向,改变驾驶速度的方式,对汽车的位置向靠近驾驶中心的方向进行矫正。
本发明的有益效果为:
1.本发明通过设置分析模块、矫正模块等,能够基于规划的路径和监测模块的监测信息,分析车辆的驾驶区域;并基于分析结果,生成矫正方案,最终由控制模块根据矫正方案,通过调整驾驶方向,改变驾驶速度的方式,对汽车的位置向靠近驾驶中心的方向进行矫正;从而使汽车行驶在相对更安全的位置。
附图说明
图1为本发明提出的一种新能源汽车无人驾驶控制系统的结构示意图。
具体实施方式
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
实施例1:
一种新能源汽车无人驾驶控制系统,包括:
GPS模块,用于接收GPS信号;
路径规划模块,用于规划驾驶路径;
监测模块,用于监测车周情况;
分析模块,基于规划的路径和监测模块的监测信息,分析车辆的驾驶区域;
矫正模块,矫正模块基于分析结果,生成矫正方案;
控制模块,控制模块根据矫正方案,控制和调整车辆。
其中,所述监测模块包括多个传感器监测单元和图像采集单元,监测模块用于捕捉周围物体信息和地面信息,地面信息包括用于划分车道的实线、虚线等等。
其中,所述分析模块分析的车辆的驾驶区域包括左侧极限距离X1,右侧极限距离X2,前侧极限距离Y1,后侧极限距离Y2;车辆的驾驶区域小于等于四个极限点连线所围成的区域,四个极限点的距离分别为左前极限点(X1,Y1)、右前极限点(X2,Y1)、右后极限点(X2,Y2)、左后极限点(X1,Y2)。
其中,所述分析模块以左后极限点为原点建立距离系,车体在距离系的距离为(Xn,Yn);分析模块判断车体与驾驶中心之间的偏移值,横向偏移值为:0.5*X2-Xn;纵向偏移值为0.5*Y1-Yn。
其中,所述前侧极限距离Y1受前方车辆和本车车速的影响;
设本车车速为Vn,警戒车速为Vy,前方车辆距离本车的距离为Y1’,后方车辆距离本车的距离为Y2’,前方基础警戒距离为Y3,后方基础警戒距离为Y4,基础预警时间为T;
当Y1’≥Y3,Vn>Vy时;Y1=(Vn-Vy)*T+Y3;
当Y1’≥Y3,Vn<Vy时;Y1=Y3;
当Y1’≤Y3,Y1=Y1’;
当Y2’≥Y4时,Y2=Y4;
当Y2’≤Y4,Y1=Y2’。
其中,所述前方基础警戒距离Y3为10m,后方基础警戒距离为Y4为10m。
其中,所述矫正模块根据横向偏移和纵向偏移值生成矫正方案,控制模块根据矫正方案,通过调整驾驶方向,改变驾驶速度的方式,对汽车的位置向靠近驾驶中心的方向进行矫正。
其中,所述无人驾驶控制系统的控制方法包括如下步骤:
S1:路径规划模块规划驾驶路径;
S2:分析模块基于规划的路径和监测模块的监测信息,分析车辆的驾驶区域,得出横向偏移值、纵向偏移值;
S3:矫正模块根据横向偏移和纵向偏移值生成矫正方案;
S4:控制模块根据矫正方案,通过调整驾驶方向,改变驾驶速度的方式,对汽车的位置向靠近驾驶中心的方向进行矫正。
实施例2:
一种新能源汽车无人驾驶控制系统,包括:
GPS模块,用于接收GPS信号;
路径规划模块,用于规划驾驶路径;
监测模块,用于监测车周情况;
分析模块,基于规划的路径和监测模块的监测信息,分析车辆的驾驶区域;
矫正模块,矫正模块基于分析结果,生成矫正方案;
控制模块,控制模块根据矫正方案,控制和调整车辆。
其中,所述监测模块包括多个传感器监测单元和图像采集单元,监测模块用于捕捉周围物体信息和地面信息,地面信息包括用于划分车道的实线、虚线等等。
其中,所述分析模块分析的车辆的驾驶区域包括左侧极限距离X1,右侧极限距离X2,前侧极限距离Y1,后侧极限距离Y2;车辆的驾驶区域小于等于四个极限点连线所围成的区域,四个极限点的距离分别为左前极限点(X1,Y1)、右前极限点(X2,Y1)、右后极限点(X2,Y2)、左后极限点(X1,Y2);
其中,所述分析模块以左后极限点为原点建立距离系,车体在距离系的距离为(Xn,Yn);分析模块判断车体与驾驶中心之间的偏移值,横向偏移值为:0.5*X2-Xn;纵向偏移值为0.4*Y1-Yn。
其中,所述前侧极限距离Y1受前方车辆和本车车速的影响;
设本车车速为Vn,警戒车速为Vy,前方车辆距离本车的距离为Y1’,后方车辆距离本车的距离为Y2’,前方基础警戒距离为Y3,后方基础警戒距离为Y4,基础预警时间为T;
当Y1’≥Y3,Vn>Vy时;Y1=(Vn-Vy)*T+Y3;
当Y1’≥Y3,Vn<Vy时;Y1=Y3;
当Y1’≤Y3,Y1=Y1’;
当Y2’≥Y4时,Y2=Y4;
当Y2’≤Y4,Y1=Y2’。
其中,所述前方基础警戒距离Y3为9m,后方基础警戒距离为Y4为6m。
其中,所述矫正模块根据横向偏移和纵向偏移值生成矫正方案,控制模块根据矫正方案,通过调整驾驶方向,改变驾驶速度的方式,对汽车的位置向靠近驾驶中心的方向进行矫正。
其中,所述无人驾驶控制系统的控制方法包括如下步骤:
S1:路径规划模块规划驾驶路径;
S2:分析模块基于规划的路径和监测模块的监测信息,分析车辆的驾驶区域,得出横向偏移值、纵向偏移值;
S3:矫正模块根据横向偏移和纵向偏移值生成矫正方案;
S4:控制模块根据矫正方案,通过调整驾驶方向,改变驾驶速度的方式,对汽车的位置向靠近驾驶中心的方向进行矫正。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种用于新能源汽车无人驾驶的导航芯片
- 一种新能源汽车无人驾驶自动对接式储能充电装置
- 一种用于新能源汽车ESC的协同控制系统
- 一种用于新能源汽车耐候型无人驾驶控制器线束
- 一种基于深度学习的新能源汽车无人驾驶径优化方法