使用配备有升降辅助装置的车辆的物品重新定位方法
文献发布时间:2023-07-07 06:30:04
技术领域
本公开总体上涉及例如使用车辆在工作场地处重新定位物品的方法。
背景技术
诸如皮卡车的许多车辆包括货厢。已经与货厢结合使用各种结构来帮助固定和管理货厢内的负载。
发明内容
在一些方面,本文描述的技术涉及一种物品重新定位方法,其包括:响应于对物品的请求,沿着第一路线将车辆移动到所述物品的位置;使用安装到所述车辆的升降辅助装置将所述物品装载在所述车辆中;沿着第二路线移动所述车辆以将所述物品运输到期望位置;并且在所述期望位置处,使用所述升降辅助装置从所述车辆卸载所述物品。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其中所述第一路线和所述第二路线各自使用由所述车辆获得的数据来至少部分地进行计划,所述数据包括关于所述车辆附近的区域、所述物品附近的区域或两者的信息。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其还包括使用所述车辆的至少一个传感器来获得数据。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其还包括使用所述车辆的至少一个相机来获得数据。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其中所述第一路线和所述第二路线各自使用由无人机获得的数据来至少部分地进行计划。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其中当所述车辆沿着所述第一路线移动时计划所述第一路线的各部分。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其中所述请求是从用户发送的请求。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其中所述请求是基于时间的流逝而发送的请求。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其中所述第一路线与所述第二路线相同。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其还包括使所述车辆沿着所述第一路线自主地移动并且使所述车辆沿着所述第二路线自主地移动。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其还包括在使所述车辆沿着所述第一路线移动之后并且在使所述车辆沿着所述第二路线移动之前使所述升降辅助装置在车辆横向方向上沿着横杆滑动。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其中所述车辆是乘用车辆。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其中所述车辆是皮卡车。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其中所述车辆是道路车辆。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其中所述升降辅助装置是机器人臂。
在一些方面,本文所述的技术涉及一种物品重新定位方法,其还包括在所述装载期间,当所述物品是第一类型的物品时将所述物品定位在所述车辆的第一区域中,并且当所述物品是不同的第二类型的物品时将所述物品定位在所述车辆的不同的第二区域中。
在一些方面,本文描述的技术涉及一种物品重新定位方法,其还包括使所述车辆自主地移动到垃圾的位置并且使用所述升降辅助装置将所述垃圾装载到所述车辆中。
在一些方面,本文描述的技术涉及一种车辆总成,其包括:车辆的货厢;横杆,所述横杆跨越所述货厢,所述横杆可相对于所述货厢滑动;升降辅助装置,所述升降辅助装置安装到所述横杆;以及至少一个传感器,所述至少一个传感器收集用于为所述车辆计划路线以自主地移动到所述升降辅助装置可以将物品装载到所述货厢中的位置的数据。
在一些方面,本文描述的技术涉及一种车辆总成,其还包括至少一个相机,所述至少一个相机收集用于计划所述路线的数据。
在一些方面,本文描述的技术涉及一种车辆总成,其中所述车辆是皮卡车。
可以独立地或以任何组合方式采用前述段落、权利要求或以下描述和附图的实施例、示例和替代方案,包括它们的各种方面或相应各个特征中的任何一个。结合一个实施例描述的特征适用于所有实施例,除非此类特征是不兼容的。
附图说明
根据具体实施方式,所公开的示例的各种特征和优点对于本领域技术人员而言将变得显而易见。随附于具体实施方式的附图可以简要地描述如下:
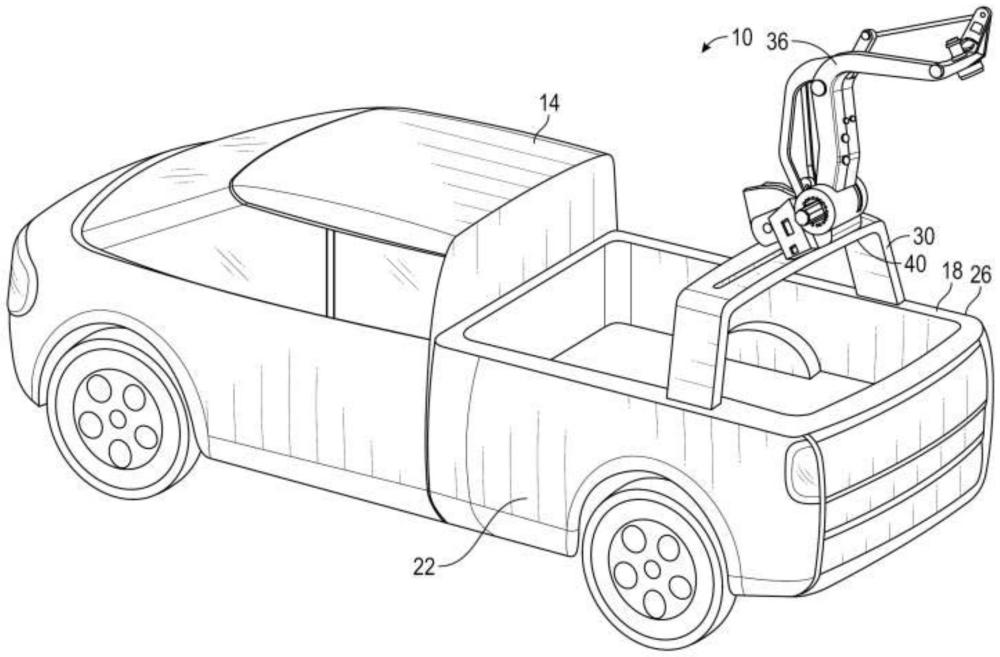
图1示出具有货厢和横杆的车辆的透视图,其中升降辅助装置安装在横杆的顶上。
图2示出图1中的车辆的一部分的侧视图。
图3示出图1的横杆和货厢的透视图,其中移除了选定部分。
图4示出在图3中的线4–4处截取的横截面图。
图5示出使用图1至图4的车辆重新定位物品的示例性方法的流程。
图6示出使用图5的方法的工作场地。
图7示出使用图1至图4的车辆重新定位物品的另一示例性方法的流程。
具体实施方式
本公开详述了与车辆的货厢结合使用的横杆,以及安装到横杆的升降辅助装置。横杆可以可滑动地联接到轨道总成。横杆可以通过使横杆沿着轨道滑动来重新定位。横杆沿着轨道的重新定位可以是自动的。
参考图1和图2,示例性车辆10包括驾驶室14和位于驾驶室14后方的货厢18。在此示例中,车辆10是皮卡车。皮卡车是被许可在道路上操作的乘用车辆。因此,示例性皮卡车是道路车辆。
在此示例中,车辆10可以作为可以通过传感器、相机等的组合解释其周围环境并行进到不同位置的自主车辆操作。车辆10可以包括控制系统,所述控制系统解释感测到的信息以检测障碍物并且为车辆10选择最适当的行进路径。
货厢18包括驾驶员侧壁总成22和乘客侧壁总成26。横杆30从驾驶员侧壁总成22延伸到乘客侧壁总成26,使得横杆30跨越货厢18。
升降辅助装置36安装在横杆30的顶上。升降辅助装置36可以用于辅助将物品装载到货厢18中。在另一个示例中,升降辅助装置36安装到横杆30的下侧40,使得升降辅助装置36从横杆30悬挂。
横杆30可以通过沿着货厢18的长度在向前位置与向后位置之间滑动来重新定位。重新定位横杆30重新定位了升降辅助装置36。可以重新定位横杆30以重新定位升降辅助装置36。
在此示例中,升降辅助装置36可滑动地安装到横杆30,使得升降辅助装置36可以在车辆横向方向上来回滑动。可以另外通过相对于横杆30在车辆横向方向上平移升降辅助装置36来重新定位升降辅助装置36。
在此示例中,车辆10包括致动器总成38和控制模块42。响应于来自控制模块42的命令,致动器总成38可以沿着货厢18前后移动横杆30。致动器总成38还可以在车辆横向方向上相对于横杆30移动升降辅助装置36。
控制模块42在图2中示意性地示出。应当理解,控制模块42可以包括硬件和软件,并且可以是整体车辆控制模块(诸如,电池车载控制模块或车辆系统控制器(VSC))的一部分,或者可以替代地是与VSC分开的单独的控制器。
在示例性实施例中,本文描述的控制模块42的操作中的一些可以由单独的控制模块(诸如车载控制模块和车辆控制模块)执行。在这方面,控制模块42可以包括车载控制模块和车辆控制模块中的一者或多者。
控制模块42可以被编程有可执行指令以用于与车辆10的各个部件对接并且操作所述车辆的各个部件。控制模块42可以包括用于执行各种控制策略和模式的处理单元和非暂时性存储器。在示例中,控制模块42包括作为存储器的电可擦除可编程只读存储器(EEPROM),所述电可擦除可编程只读存储器是通常在计算机和远程无钥匙系统中使用的非易失性存储器的类型。可以通过应用可以由控制模块42发送的特殊编程信号来在电路中对EEPROM进行编程和擦除。
在示例中,致动器总成38包括驾驶员侧壁总成22内的马达和乘客侧壁总成26内的另一个马达。马达可以用于驱动横杆30的向前和向后移动。马达可以包括用于保持横杆30的位置的机械制动器。
具体地,与驾驶员侧壁总成22相关联的致动器总成38可以包括通过一组减速齿轮驱动螺杆机构的DC马达。在另一个示例中,可以使用AC马达来驱动螺杆机构。AC马达可以是150kV的AC马达。通过DC马达驱动或旋转螺杆机构沿着驾驶员侧壁总成22移动平台或基座。横杆30直接固定到平台或基座。另一个DC马达、螺杆机构和一组减速齿轮与乘客侧壁总成26相关联并且用于驱动横杆30的乘客侧。虽然上面描述了示例性类型的致动器总成38,但是用于移动横杆30的其他选项也设想到并且落入本公开的范围内。
致动器总成38可以响应于来自用户的命令而由控制模块42激活。所述命令致使致动器总成38移动横杆30。可以通过移动或智能装置(诸如智能电话、钥匙扣、平板电脑等)发送命令。在另一个示例中,用户与驾驶室14内部的触摸屏交互以致使控制模块发起命令。
现在参考图3和图4,驾驶员侧壁总成22和乘客侧壁总成26各自包括内侧54、外侧58和上侧62。轨道70安装到驾驶员侧壁总成22的内侧54。另一个轨道70安装到乘客侧壁总成26的内侧54。
为了将横杆30可滑动地联接到轨道70,驾驶员侧安装支架74D将横杆30的端部部分78D联接到驾驶员侧轨道70。乘客侧安装支架将横杆30的乘客侧端部部分78P联接到乘客侧轨道70。
驾驶员侧安装支架74D具有可滑动地联接到驾驶员侧轨道70的一部分。对应的乘客侧安装支架具有可滑动地联接到乘客侧轨道70的一部分。在此示例中,安装支架74D通过辊和衬套总成76与轨道70接合,所述辊和衬套总成可以将负载从横杆30传递到相应的轨道70。
覆盖件82D隐藏安装支架74D的至少一部分以及辊和衬套总成86。覆盖件82D可以帮助保护这些部件免受污垢和损坏。覆盖件82D可以允许布线(例如,用于为致动器总成38供电的布线)以类似于常规车辆上的滑动门行进的方式行进,同时保护布线。另一个覆盖件82P隐藏乘客侧上的安装支架的至少一部分以及相关联的辊和衬套总成。
轨道70可以直接安装到驾驶员侧壁总成22和乘客侧壁总成26的内侧54。轨道70可以安装到现有的货物管理栓系位置和用于汽车的结构件。
在示例性实施例中,轨道70被安装成使得轨道70竖直位于驾驶员侧壁总成22和乘客侧壁总成26的上侧62下方。这有助于隐藏轨道70。在此示例中,横杆30的所有部分都竖直位于上侧62上方。出于本公开的目的,竖直是参考地面以及车辆10在操作期间的通常取向。
示例性升降辅助装置36是机器人臂。在具体示例中,升降辅助装置36是码垛臂。升降辅助装置36可以用于完成多种任务,诸如装载货物、给建筑物涂漆、在安装对象时支撑对象等。
当在车辆10的乘客侧需要升降辅助装置36时,升降辅助装置36(图2)、控制模块42可以致使致动器总成38将升降辅助装置36沿着横杆30平移到乘客侧。当驾驶员侧需要升降辅助装置36时,升降辅助装置36可以在平移到驾驶员侧。例如,将升降辅助装置36安装在横杆30上而不是货厢18上保持货厢18对于货物可触及。
通过横杆30和升降辅助装置36的移动,车辆10附近的物品90可以被提升并移动到车辆10中。然后车辆10可以移动以将物品90运输到期望位置,其中可以通过横杆30和升降辅助装置36的移动将物品90从车辆10卸载。
现在参考图5和图6并且继续参考图1至图4,工作场地处的示例性物品重新定位方法100利用车辆10。方法100开始于步骤110,其中在车辆10处接收请求。所述请求可以由至少一个用户112发送。所述请求可以是对车辆10将物品90递送到期望位置的请求。物品90可以是例如工具、建筑材料、供应品等。在此示例中,物品90是至少一个用户112完成墙壁116所需的一堆砖。
用户可基于周期、安排或事件驱动关于对物品的未来请求与车辆10通信。经由自动化输入或用户输入的通信可以经由相关联的车辆请求来传输,使得车辆10能够识别将来要执行的功能。例如,所述请求可以经由手持式装置上的应用进行。
所述请求可以包括发出请求的至少一个用户112的位置以及识别信息(面部识别、姓名、工作等)。所述请求可以包括物品90应当被放下的位置。所述位置在图6中被指定为期望位置。如果用户112想要授权放下,则所述请求可以授权另一个用户接收物品90。
请求可以自动化到一定程度,使得车辆10基于当天正在执行的工作或基于项目的完成而带来特定类型的物品(工具、材料等)。在一些示例中,车辆10可以识别出需要将先前使用的物品(诸如工具)返回到仓库并且需要取回新物品。用户112可以从提供车辆10可以识别、拾取和递送的所有类型的物品的可用“目录”中选择物品90。
物品90的信息(位置、升降辅助装置36可以施加到物品90的最大力、如何将物品90固定在车辆10内)也可以作为一组指令被编程到目录中以确保车辆10能够在不损坏物品的情况下拾取/放下物品。
在另一个示例中,所述请求可以是基于时间的流逝。例如,当自车辆10上次将物品递送到期望位置以来已经过去了两个小时时,车辆10可以接收到请求。
可以基于需要物品90的项目的完成阶段来预先计划请求。完成百分比的确定可以是基于用户输入、由无人机或车辆10的传感器套件识别。所述确定可以是基于特定项目的图像与所述项目在完成时的计算机生成的图像的比较。
所述请求可以是基于材料的消耗速率,或者基于由工作现场管理关于每个项目应当进行多快而提供的时间线。所述请求可以是基于将在当天或当周完成的预期任务。
在一些示例中,可以提前对请求进行编程,使得在特定时间(午休之后、第二天工作之前等)将特定类型的物品递送到期望位置。
响应于在步骤110处接收到的请求,车辆10在步骤120处沿着第一路线自主地移动并且在物品90附近停止。然后,在步骤130处,车辆10将物品90装载到车辆10的货厢18中。在此示例中,升降辅助装置36用于将物品90装载到货厢18中。装载可以包括在车辆横向方向上沿着横杆30滑动升降辅助装置36以适当地定位升降辅助装置36。
接下来,在步骤140处,车辆10沿着第二路线自主地移动到至少一个用户112和墙壁116附近的期望位置。在车辆10处于期望位置之后,在步骤150处从货厢18卸载物品90。然后,至少一个用户112可以使用物品90(即,砖)来完成墙壁116。
值得注意的是,在步骤120之前,使用由车辆10获得的数据至少部分地计划第一路线。所述数据可以包括关于车辆10附近的区域、物品附近的区域或两者的信息。
车辆10可以包括收集信息的多个传感器122和多个相机124。传感器122可以包括激光雷达、雷达、超宽带定位和传感器技术等。
在一些示例中,一个或多个相机可以安装到横杆30,并且一个或多个相机可以安装到升降辅助装置36。可以通过在车辆10内前后移动横杆30来改变这些相机的视野。这些相机的视野可以另外通过沿着横杆30平移升降辅助装置36、通过移动升降辅助装置36或两者来改变。
在此示例中,车辆10与用于收集关于车辆10附近的区域、物品附近的区域或两者的附加信息的无人机126相关联。无人机126可以从车辆10发射并且可以从车辆10控制。
在此示例中,传感器122、相机124和无人机126可以检测车辆10在沿着第一路线行进时应当避开的障碍物。在此示例中,传感器122、相机124和无人机126可以检测物品90的位置。
障碍物包括水、施工拖车、树木、碎屑、建筑材料、建筑物等。第一路线是自动计划的,使得车辆10可以在沿着第一路线移动到物品90时避开这些障碍物。
还使用由车辆10获得的数据至少部分地计划第二路线。所述数据可以包括关于车辆附近的区域、期望位置附近的区域和物品90附近的区域的信息。
在步骤130处装载物品90之后,可以至少部分地计划第二路线。替代地,可以在计划第一路线时或在车辆10沿着第一路线行进时计划第二路线。在一些示例中,第二路线与第一路线相同,使得车辆10在从物品90的位置返回到期望位置时沿第一路线原路返回。
虽然物品90的位置和期望位置可能是已知的,但是在车辆10沿着第一路线或第二路线移动之前不需要完全计划第一路线和第二路线。例如,当车辆10沿着第一路线移动时,可以计划和改进第一路线。当车辆10沿着第一路线移动时,传感器122、相机124和无人机126可以连续地扫描车辆10前方并且改进第一路线。
在步骤130处的装载期间,可以基于所装载物品的类型而将物品90放置在车辆10的特定区域中。例如,如果物品是特定类型的工具(例如,钉枪),则物品90可以被定位在货厢18的指定用于所述钉枪的区域中。如果物品90是另一种类型的物品(例如,梯子),则物品90可以被定位在货厢18的另一个指定区域中。将物品90定位在特定区域中除了其他之外还可以帮助用户112快速识别车辆10是否包括正确的物品。
当升降辅助装置36装载和卸载物品90时,可以使用车辆10的传感器122和相机124。例如,传感器122和相机124可以用于识别物品90并且确定物品90的取向。车辆10可以相对于物品90重新定向自身,使得物品90在升降辅助装置36的能够到的范围内。
车辆10可以使用升降辅助装置36将物品90放置到车辆10的指定隔室中以进行运输。车辆10可以经由传感器122、相机124或两者扫描快速响应、UPC(通用产品代码)或其他基于图形的代码,或者使用RFID标签跟踪物品90和其他物品。当物品90放置在车辆10内部时,关于代码或标签的信息可以揭示物品90应存放的位置。
可以针对每个请求组织物品90的放置。如果正在履行多于一个的请求并且装载了多于一个的物品90,则车辆10可以在卸载过程期间调用哪个物品属于哪个期望位置。可以将物品90放置在车辆10内以避免在运输期间损坏。根据需要,机器人和人类也可以用于将物品90带到车辆10并且辅助装载。如果车辆10无法使用传感器122、相机124和无人机126来定位拾取物品90的位置,则用户输入(诸如在物品90附近的个体的手动放置)可以通知升降辅助装置36物品90的位置以及抓取物品90的位置。
一旦物品90以及请求上列出的任何其他物品从存储位置装载,车辆10就可以使用相机124(中央高位刹车灯相机、内部相机等)执行验证以确保物品90和其他物品正确地定位在车辆10上。
如果车辆10已经拾取了需要递送到不同期望位置的物品,则车辆10可以基于例如优先级、接收到的请求顺序和路线长度来确定最佳第二路线。
例如,在运输期间,车辆10可以基于使用相机124识别出物品在行进期间正在移位来经由升降辅助装置36执行所述物品的负载稳定。
物品的放下和取回有效性、及时性等可以在过程中的多个点处进行记录,并用于优化/计划或安排纠正/发出遏制措施。
当卸载物品90时,升降辅助装置36可以向用户112展示物品以确保用户112正在获得正确的物品90。关于物品90的信息也可以由用户112确定或提供。所述信息可以用于发起维修、燃料补给和再充电请求,或者防止发起清理。例如,请求可以包括“此切削工具需要新刀片”;“此发电机需要更多的燃料”;“此钻头的电池需要再充电”;“此油桶仍然是半满的,使它保持处于直立取向”。
在一些示例中,升降辅助装置36可以在物品90被拾取/返回时执行对物品90的检查。可以通过提起物品90来评估重量(从机器人工具提示处的力传感器读取)。如果物品90包括刀片,则可以通过沿着工具在刀片附近缓慢移动相机来获取刀片的状况。如果在车辆10上运行的软件不能够准确地评估图像,则可以将物品90的图像转发给现场人员或利用基于云的通信转发给非现场评估器。
可以经由车辆190上的相机124和传感器122或经由使用车辆10作为通信枢纽的移动装置来提供来自团队成员的反馈和指令。
在一些示例中,车辆10可以用于清理工作场地。车辆10可以例如自主地在工作场地四处移动并且可以拾取碎屑和垃圾。车辆10可以沿着使车辆10在工作场地四处的各个位置附近移动的路线行进,使得车辆10可以在这些位置处收集碎屑和垃圾。在这些位置处,升降辅助装置36可以用于将垃圾和/或碎屑移动到车辆10中。可以使用由车辆10或无人机126收集的数据至少部分地识别具有垃圾和碎屑的位置。
可以使用传感器122、相机124、无人机126或这些的某种组合来识别垃圾和碎屑。在一些示例中,用户可以向车辆10展示需要取回的物品的类型(包装材料、油漆桶等)。然后,车辆可以利用车辆传感器套件和图像识别软件来识别和取回工作场地四处的类似物品。
随着时间的推移,机器学习可以帮助改进车辆10在取回物品(诸如物品90)或拾取垃圾时所采用的路线。例如,最有效的材料再供应定时、工具运行、设置和拆卸序列可以随时间进行记录,并且用于改进未来的路线。
在一些示例中,如果没有发起请求,则车辆10可以访问、停放或巡逻工作场地并且等待发起请求。
车辆10可以通过巡逻工作现场并且清理可能被丢弃的类型的物品来充当移动垃圾箱。物品可以是由传感器122和相机124识别的特定容器、箱、盒子或袋。
车辆10可以被自动地编程为一旦完成当天的工作就前往每个工作场地位置,并且将每个工作现场处的未使用的材料和工具移动到存储位置,因此当工作现场没有个体时,这些类型的物品不会被盗。
当个体不在工作现场时,车辆10可以被编程为递送第二天工作所需的特定物品(诸如工具和材料)。当个体不在工作现场时,车辆10可以与其他工具(诸如水泵或真空吸尘器)结合使用,以从工作场地上的各个位置抽吸水和碎屑。
现在参考图7并且继续参考图1至图6,与车辆10相关联的另一个示例性物品重新定位方法200开始于步骤110,其中启用物品重新定位方法特征并且将车辆10分配给地理区域。地理区域可以包括多个单独的工作场地。
接下来,在步骤220处,车辆10及其相关联的无人机绘制出每个工作场地与各个物品位置之间的路线。
在步骤230处,生成并由车辆10接收请求。所述请求是使车辆10拾取物品(零件、工具、材料等)或提供支持功能。然后,在步骤240处,车辆10行驶到可以是期望物品的位置的位置。
然后,在步骤250处,车辆10利用传感器套件、横杆30和升降辅助装置36来拾取期望的一个或多个物品并且将它们放置到车辆10的相关联的隔室或区域中。
在步骤260处,方法200评估装载是否完成。如果完成,则在步骤270处,方法200执行物品验证以确保所请求的每个物品都存在于车辆10中。
然后在步骤280处,车辆10可以确定最佳返回路线。返回路线将带有物品的车辆10带到期望位置。可以根据在步骤220中绘制出的路线中的一个选择返回路线。
接下来,方法200移动到步骤290,其中使用传感器套件、横杆30和升降辅助装置36卸载物品。
然后,如果需要,可以执行辅助车辆功能。可以根据需要重复方法200。
先前描述在本质上是示例性的而非限制性的。对所公开的示例作出的变化和修改对于本领域技术人员而言可能变得显而易见,所述变化和修改不一定脱离本公开的本质。因此,只能通过研究所附权利要求来确定赋予本公开的保护范围。
- 配备有侧气囊装置的车辆座椅和侧气囊装置
- 基于车辆和环境特性来重新定位车辆的方法和设备
- 一种钢板钻孔用辅助定位装置及其使用方法
- 快闪存储器装置的重新启动方法以及使用该方法的装置
- 一种城轨车辆用回流装置及其升降靴方法
- 用于控制配备有自动变速器的车辆的重新起动的方法和装置
- 用于控制配备有自动变速器的车辆的重新起动的方法和装置