一种利用辅助线圈来对定转子相对位置检测的方法
文献发布时间:2024-01-17 01:17:49
技术领域
本发明涉及永磁同步电动机领域,特别地,涉及一种利用辅助线圈来对定转子相对位置检测的方法。
背景技术
随着变频控制方案的现世,变频驱动的永磁同步电动机被广泛应用,但是同步电动机存着致命的问题,就是不能正常启动,为此各大研究院所和应用结构寻找出各种方案来解决问题,目标就是寻找定转子的相对位置,然后让转子处于定子磁场时刻处于产生力矩的状态,从而保证电机的正常启动并且发挥出电机的最大功率密度。
刚开始的时候,普遍采用电机上装配各种编码器反馈定转子的相对位置,但是编码器的成本或昂贵或受使用条件限制,最近各大厂家在电机控制要求不高的情况开始通过检测电流的方案来判断定转子的相对位置。
检测电流的方案虽然降本,但是对控制模块的要求较高,且电机的使用环境往往非常复杂,工作情况存在着转速范围大,负载变化大的情况,这个时候控制模块就会出现不是每个工作状态控制都准确的状态,比如:电机的负载较轻的时候电机负载电流就较小,电流检测方式就会出现定转子相对位置检测不准确的情况。
针对这种情况,本发明需要解决的技术问题是:如何保证轻载和额定负载情况下都检测准确,低速和高速也都检测准确。
发明内容
本发明的目的在于针对现有技术的不足之处,至少在一定程度上解决相关技术中的技术问题,提供一种利用辅助线圈来对定转子相对位置检测的方法,具有成本低,简单化了电机的定位问题,解决了低负载状态下电机工作不稳定的问题,增大了转速调整范围,并且增大了电机稳定工作范围的优势。
为了解决上述技术问题,本发明的技术方案是:一种利用辅助线圈来对定转子相对位置检测的方法,包括永磁同步电机,在永磁同步电机的定子上增加辅助线圈,辅助线圈在定子上呈对称结构,辅助线圈的组数和电机的极对数数量保持一致,辅助线圈上电连接有控制模块,控制模块采集辅助线圈工作数据以及控制辅助线圈工作。
优选的,所述控制模块控制辅助线圈工作包括:当判断有电机定位命令时,单独给所述辅助线圈通入不改变方向的电流,用以确定转子的相对位置。
优选的,所述控制模块控制辅助线圈工作包括:当判断电机在空载或过小的负载状态时,所述控制模块向辅助线圈通入电机运行的同频率变化但不参与电机驱动的电流。
优选的,所述控制模块控制辅助线圈工作包括:当判断电机达到预设的功率值、或预设的转矩或预设的电流值时,控制模块断开辅助线圈的供电。
优选的,所述控制模块控制辅助线圈工作包括:当判断电机转速达到预设转速值时,控制模块向辅助线圈增加反向电流,用以增加定子的反向磁链,用于减弱转子永磁磁场。
优选的,当判断电机转速需求命令高于预设转速值时,所述控制模块在控制辅助线圈增加反向电流的同时,改变定子磁场和转子磁场相对角度。
优选的,所述控制模块对电机运行状态进行标记,形成状态记号,根据状态记号进行有序巡查。
相比于背景技术,本发明技术效果主要体现在以下方面:
通过在定子上增加辅助线圈方案,通过在控制模块和辅助线圈两者共同工作,简单化了电机的定位问题,解决了低负载状态下电机工作不稳定的问题,增大了转速调整范围,并且增大了电机稳定工作范围(低速下和高速下都能正常工作)。
附图说明
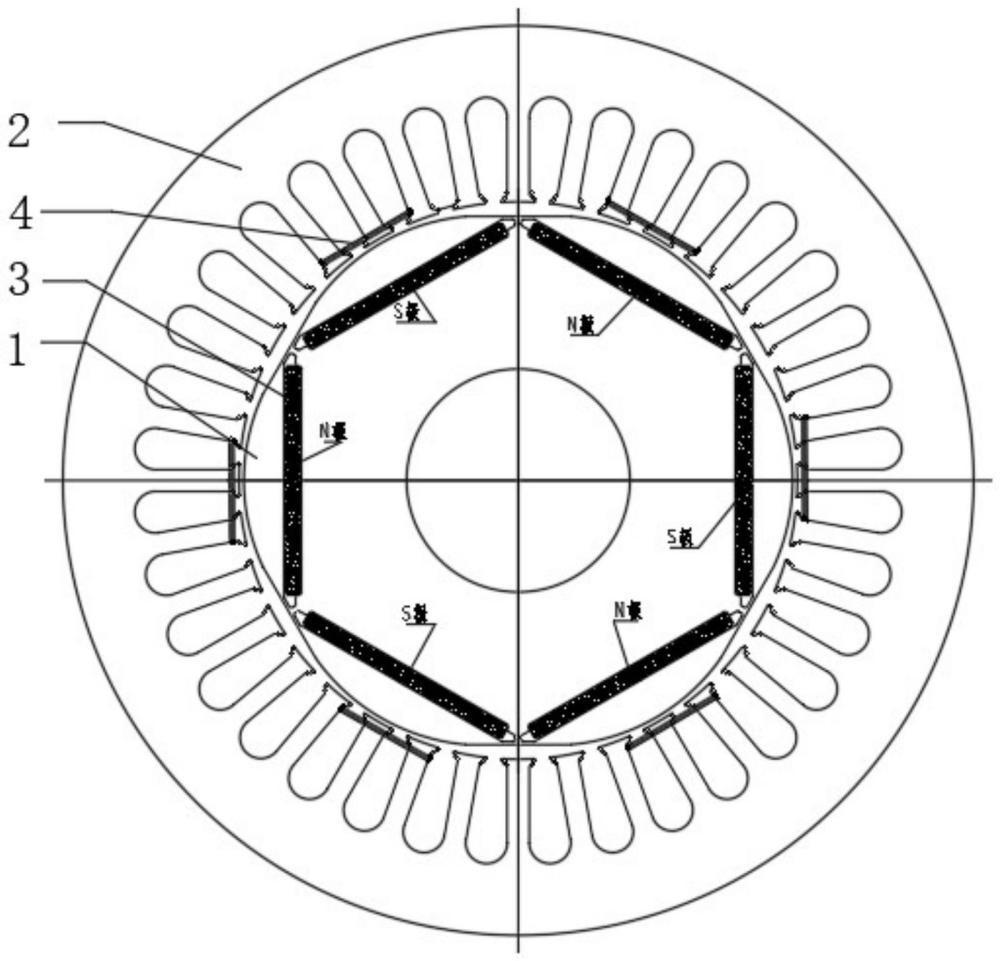
图1为实施例中辅助线圈分布示例图;
图2为实施例中控制模块对辅助线圈的控制示例图。
附图标记:1、转子;2、定子;3、磁钢;4、辅助线圈;5、控制模块。
具体实施方式
以下结合附图,对本发明的具体实施方式作进一步详述,以使本发明技术方案更易于理解和掌握。
实施例:
本发明的设计在检测电机的电压电流的基础上,增加辅助线圈4。永磁同步电机中包括转子1、定子2。在转子1包括磁钢3,以及形成的如图1所示的6个磁极,交替的N极和S极。作用一:定位定转子1的相对位置,作用二:让电机轻负载时,电压电流波形检测依然准确。
具体的,在定子2上分别添加对称的辅助线圈4,线圈的组数根据电机的极对数来确定。定子2的极对数和辅助线圈4的数量一致,定子2分几极,辅助线圈4数量根据定子2极数的数量和位置制定。参考图1所示的示例理解。辅助线圈4的工作保持和定子2同步和同等均匀分布。参考图2所示,控制模块5提供单向电流示例波形图、直流电的示例波形图。
控制模块5的电路用于控制这辅助线圈4。通入单相电流或改变方向的直流电,可以和普通三相主电路相同。控制频率是保证和主电路同步,控制电流大小是改变磁链大小,也就是改变磁拉力大小。
状态一:当电机定位时,单独给这组辅助线圈4通入不改变方向的电流(可以单相电流或交变的直流电流),以确定、转子1的相对位置。单独给辅助线圈4通电,因为辅助线圈4不能改变转子1方向,只能吸引转子1的主磁场,保持转子1唯一的电角度(任意一个极)。
状态二:当电机在空载或过小的负载状态下,普通检查电流的控制方式,由于电流过小,造成检查不准确,导致电机运行不稳定出现抖动、功率不稳等不良现象,而添加了辅助线圈4后,通过控制模块5向辅助线圈4通入电机运行的同频率变化但不参与运行的电流(可以单相电流或交变的直流电流)。工作的主线圈和辅助线圈4保持同时同一个电位角和同个频率,就可以保持同步,同频率变化可以保证辅助线圈4的工作不干扰主线圈的正常工作。增加定子2的磁链φ=I*Ld,I为电流,Ld为d轴电感,电感由导电线圈匝数N和铁芯材料等决定。这个磁链只增加定子2对转子1的磁拉力,不参与电机工作。
状态三:当电动机达到一定的功率(一定的转矩或足够的电流),控制模块5就断开辅助线圈4电路,辅助线圈4不通电不参与电机的正常工作。预设的功率值为额定功率的40%以上为优选方案。
状态四:当电机的转速达到一定值后,反电动势已经很高,不弱磁已经无法再增加转速的状态下,控制模块5可以向辅助线圈4增加反向电流,增加定子2的反向磁链-φ=-I*Ld,用于减弱转子1永磁磁场,在辅助线圈4可增减足够磁场的状态下,控制模块5不需改变定、转子1相对角度的情况下,就可以达到弱磁的效果,让控制方案变得非常简单。
状态五:在状态四情况下,还不能满足转速提高的要求,可以让辅助线圈4和改变定子2磁场和转子1磁场相对角度的控制方案同时工作,大大提高弱磁范围,提高转速运行范围。改变定子2磁场和转子1磁场相对角度的方法就是普通的弱磁方式,i=cos(2π*f*t+α)其中f是频率t是时间,α是角度,改变α,就可以改变定子2电流和转子1磁场的相对角度,从而改变定子2磁场和转子1磁场的相对角度。
控制模块5就是根据不同的电机工况和功能需求,标记了五个状态,分为为上述的状态一-状态五。可以根据状态记号,状态一-状态五进行有序巡查运行。
本发明通过在定子2上增加辅助线圈4方案,通过在控制模块5上新增加一组简单的控制电路,两者共同工作,简单化了电机的定位问题,解决了低负载状态下电机工作不稳定的问题,增大了转速调整范围,并且增大了电机稳定工作范围(低速下和高速下都能正常工作)。
当然,以上只是本发明的典型实例,除此之外,本发明还可以有其它多种具体实施方式,凡采用等同替换或等效变换形成的技术方案,均落在本发明要求保护的范围之内。
- 无线电能传输的收发线圈相对位置检测装置及方法
- 无线电能传输的收发线圈相对位置检测装置及方法