一种混合动力汽车驱动系统参数优化方法
文献发布时间:2024-01-17 01:18:42
技术领域
本发明涉及混合动力汽车领域,具体涉及一种混合动力汽车驱动系统参数优化方法。
背景技术
驱动系统参数匹配对混合动力汽车的动力性和经济性影响巨大。合适的参数设计能极大地改善车辆的能量利用效率、降低故障率、提升车辆的综合性能和服役寿命。
目前,应用在车辆上进行动力性和经济性计算的商业软件通常是使用传统方法,通过反复的人工迭代计算选择合适参数,来达到动力性和经济性设计目标。但是,这样的方法需要较大的时间成本、人力成本,且设计的动力性和经济性目标难以达到综合最优;同时,随着混合动力汽车动力源增多,控制策略更加复杂,整车综合性能要求也越来越高,整车产品迭代越来越快,其参数优化匹配非常困难,传统的设计优化匹配方法已无法满足要求。
如何解决这些问题,需要一种实现多目标参数优化,迅速完成动力性和经济性综合性能寻优的混合动力汽车驱动系统参数优化方法。
发明内容
本发明的一个目的是针对现有技术存在的不足,提供一种混合动力汽车驱动系统参数优化方法,通过同时调整多个敏感参数,选择最优的设计优化匹配参数满足车辆期望的动力性和经济型,解决混合动力汽车参数优化匹配困难、时间人力成本高的问题。
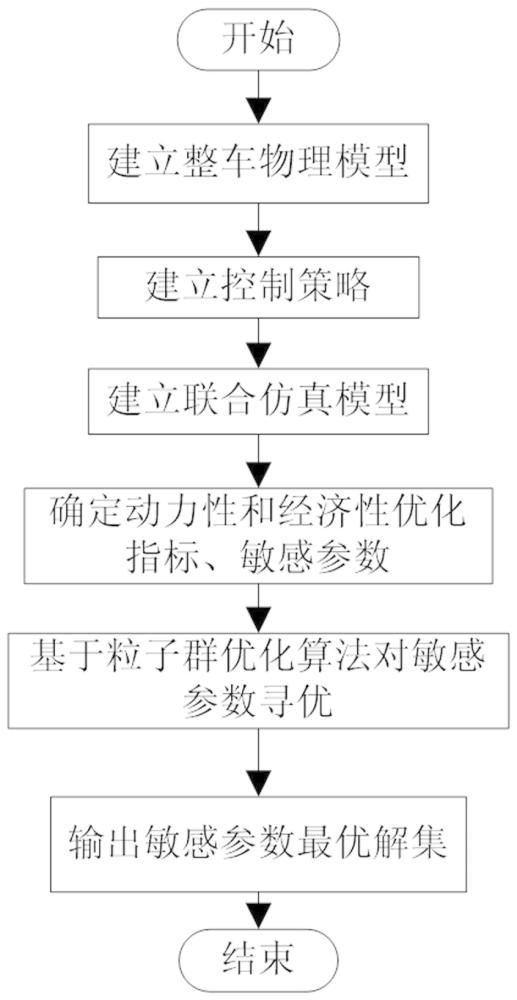
本发明的目的是采用下述方案实现的:一种混合动力汽车电驱动系统参数优化方法,包括以下步骤:
S1:建立混合动力汽车整车物理模型;
S2:建立混合动力汽车整车的控制策略,所述控制策略包括运动模式和切换策略;
S3:将S1建立的整车物理模型、S2建立的控制策略进行联合仿真,得到联合仿真模型;
S4:确定汽车百米能耗、百米加速时间、最高车速、最高爬坡度、NEDC循环工况能耗的优化指标,通过灵敏度分析方法确认敏感参数,所述敏感参数包括机械参数和控制参数;
S5:利用粒子群优化算法,在敏感参数全局范围内进行寻优,得到每个敏感参数优化的匹配参数,形成敏感参数最优解集;
S6:通过专家评判,在敏感参数最优解集内确定综合性能最合适的参数。
所述整车物理模型包括整车车身、发动机、离合器、驱动电机、发电机、动力电池、主减速器、差速器、制动系统、防滑系统、控制台、监视器、发动机特性曲线、电机特性曲线。
所述运动模式包括纯电驱动模式、纯电制动模式、增程驱动模式、发动机启动模式、发动机停止模式、增程制动模式、发动机直驱模式、混合动力驱动模式、混合动力制动模式、停车充电模式、发动机直驱制动模式、并联混动模式。
所述S5中得到敏感参数最优解集的具体步骤为:
S5-1,随机初始化每个敏感参数;
S5-2,将敏感参数带入联合仿真模型中,计算经济性、动力性,判断敏感参数是否符合优化指标;
S5-3,如果符合优化指标就返回当前的敏感参数,如果不符合优化指标就更新敏感参数,返回S5-2。
采用上述技术方案,通过整车物理模型和控制策略计算混合动力汽车动力性和经济性,利用粒子群优化算法综合考虑多个性能目标,得到混合动力汽车敏感参数最优解集,快速选择电机型号,选择最优传动比,使混合动力汽车动力性和经济性最优,解决混合动力汽车驱动系统参数优化匹配效率低,多目标参数优化匹配困难的问题,实现混合动力汽车驱动系统多目标参数优化匹配效率高、综合性能好的目标。
下面结合说明书附图和具体实施例对本发明作进一步说明。
附图说明
图1为本发明流程图;
图2为本发明的整车物理模型示意图;
图3为本发明的控制策略示意图;
图4为本发明的纯电制动能量回收模式的策略示意图;
图5为本发明的并联混动模式的策略示意图;
图6为本发明的转速差消除策略示意图;
图7为本发明粒子优化算法流程图。
具体实施方式
参见图1至图7,一种混合动力汽车电驱动系统参数优化方法,包括以下步骤:
S1:通过软件AVL Cruise建立混合动力汽车整车物理模型;所述整车物理模型包括整车车身、发动机、离合器、驱动电机、发电机、动力电池、低功耗部件、主减速器、差速器、制动系统、防滑系统、控制台、监视器、发动机特性曲线、电机特性曲线,还包括第一减速器、第二减速器、常数模块、函数模块。整车物理模型中各部件连接关系具体为,整车车身的右前轮与右前制动器机械连接,右后轮与右后制动器机械连接,左前轮与左前制动器机械连接,左后轮与左后制动器机械连接,所述发动机与离合器、第一减速器互相机械连接,第一减速器与发电机之间机械连接,所述离合器、主减速器、第二减速器之间两两相互机械连接,所述第二减速器与驱动电机之间机械连接,所述主减速器与差速器之间相互机械连接,所述差速器与左、右后制动器分别机械连接,所述发电机与动力电池之间通过电缆连接,动力电池与低功耗部件之间电缆连接,动力电池与驱动电机之间电缆连接。整车物理模型中,各部件通过CAN总线进行信号传输。
S2:通过软件Matlab建立混合动力汽车整车的控制策略,所述控制策略包括运动模式和切换策略;所述运动模式包括纯电驱动模式、纯电制动模式、增程驱动模式、增程制动模式、发动机启动模式、发动机直驱模式、发动机直驱制动模式、发动机停止模式、混合动力驱动模式、混合动力制动模式、停车充电模式、行车充电模式、怠速充电模式、停车发电模式、并联混动模式。所述纯电驱动模式下,车辆的所有驱动功率均来自动力电池,动力电池的功率经驱动电机转化成机械能之后通过汽车的动力传动系统传递到车身的各轮端;所述行车充电模式下驱动功率均来自发动机,发动机输出功率经过发电机转换为电能,一部分电能经驱动电机转换为机械能,通过汽车传动系统传递到车身的各轮端,另一部分电能输入到动力电池中储存起来;所述怠速充电模式下,传动系统与车轮端断开,车辆处于静止状态,发动机工作驱动发电机发电,电能输入到动力电池存储。如图3所示,所述控制策略根据车辆当前的行驶速度、当前的动力电池的电池荷电量、车辆的需求功率及扭矩并结合驾驶员意图来确定最优的工作模式,并将最优工作模式对应的控制信号输出给整车模型。所述控制策略能够实现数据类型转换、功率计算、档位计算、切换混合动力系统不同运动模式、切换混合动力系统模式状态机以及转矩限制及信号输出的功能。
所述纯电制动模式,动力电池电量充足时不需要回收电能,车速较低时候回收效率较低,因此驱动电机是根据车辆车速、电池容量进行能量回收,多余的制动力由机械刹车提供。本实施例中,纯电制动能量回收模式策略如图4所示,驱动电机请求转矩TmCmdTorque为负数,驱动电机处于发电状态,为了防止电池过充或动力电池能量过低不能及时补充的状况,在能量回收策略中考虑动力电池的电量SOC
所述增程模式为发电机根据动力电池电量情况以及发动机的最优转矩进行自适应发电,驱动电机根据车辆行驶需求转矩大小提供对应的转矩。
本实施例的并联混动模式下控制策略如图5所示,当需求转矩DrvReqTorque大于发动机最优转矩EngineOptTorq和驱动电机最大转矩Tm_Max_Torque之和时,驱动电机工作在最大驱动转矩状态,其剩余力矩由发动机提供。当需求转矩DrvReqTorque小于发动机最优转矩EngineOptTorq和驱动电机最大转矩Tm_Max_Torque之和,而且需求转矩DrvReqTorque大于发动机最优转矩EngineOptTorq时,发动机工作在最优转矩区域,剩余力矩由驱动电机提供。需求转矩DrvReqTorque微小于发动机最优转矩EngineOptTorq时,发动机工作在最优转矩区域附近。
当车速和发动机转速不匹配的时候,模式切换会发生冲击,因此需要消除转速差的策略,在本实施例中发电机带动发动机消除转速差策略如图6所示,根据车速Velocity计算出对应的发动机转速,将计算出的发动机转速与实际发动机转速EngineSpeed做比较,通过发电机GmCmdTorque调整发动机的转速从而达到消除转速误差的目的。
S3:将S1建立的整车物理模型、S2建立的控制策略进行联合仿真,得到联合仿真模型用于对整车的动力性、经济性进行计算;
S4:确定汽车百米能耗、百米加速时间、最高车速、最高爬坡度、NEDC循环工况能耗的优化指标;通过灵敏度分析方法确认敏感参数,所述敏感参数包括机械参数和控制参数,所述机械参数包括电机额定功率、减速比,所述控制参数包括低电量切换阈值、高电量切换阈值、高车速切换阈值、低车速切换阈值;本实施例中,电机额定功率可选择50kW、55 kW、55kW,减速比为 8 S5:利用粒子群优化算法,在敏感参数全局范围内进行寻优,得到每个敏感参数优化的匹配参数,形成敏感参数最优解集;所述S5中得到敏感参数最优解集的具体步骤为: S5-1,随机初始化每个敏感参数; S5-2,将敏感参数带入联合仿真模型中,计算经济性、动力性,判断敏感参数是否符合优化指标; S5-3,如果符合优化指标就返回当前的敏感参数,如果不符合优化指标就更新敏感参数,返回S5-2。 S6:通过专家评判,在参数最优解集内确定综合性能最合适的参数。 以上所述仅为本发明的优选实施例,并不用于限制本发明,本领域的技术人员在不脱离本发明的精神的前提下,对本发明进行的改动均落入本发明的保护范围。
- 一种用于混合动力汽车驱动系统的复合磁性材料及制备方法
- 一种混合动力汽车多模式驱动测试方法与装置
- 一种混合动力汽车驱动系统
- 混合动力汽车的控制方法、动力驱动系统和混合动力汽车
- 一种插电式混合动力汽车传动系统的评价与参数优化方法