作业平台控制系统和高空作业平台设备
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及工程机械技术领域,尤其涉及一种作业平台控制系统和高空作业平台设备。
背景技术
自行走式高空作业平台主要应用于建筑施工、钢结构、场馆、船厂及租赁等领域,随着我国基础设施建设的快速发展,高空作业平台的需求量和保有量也在快速增长,与此同时,同行业的相互竞争以及客户对性能的要求越来越高,使得高空作业平台具有高安全性、高可靠性、高智能化、高操控性的要求,其中高操控性就意味着动作的平稳性及快速响应性。
目前自行走式高空作业平台的平台控制系统一般采用恒压系统或定量负载敏感系统。恒压系统的优点是动作平稳、响应快速,但存在较大的压力损失,容易造成能量浪费。定量负载敏感系统的压力可以跟随负载变化,能够极大地降低压力损失,但因其引入了三通压力补偿阀,又会降低系统的稳定性,使得系统容易产生振动,从而引起系统的压力波动,而为了解决压力波动造成的动作抖动问题,常在负载反馈油路增加蓄能器以对系统压力进行滤波,然而蓄能器的充能需要时间,这将造成系统建压缓慢,从而导致系统的响应性降低,尤其在平台摆动等小流量动作中的表现极为明显,平台摆动容易出现启动延时的现象。综上所述,目前亟需一种兼顾平稳性和响应性的系统解决方案。
需要说明的是,公开于本发明背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
发明内容
本发明提供一种作业平台控制系统和高空作业平台设备。
根据本发明的一个方面,提供一种作业平台控制系统,包括恒流源、第一执行装置、第二执行装置和流量控制阀,恒流源被配置为提供预设流量的液压油,第一执行装置包括第一执行机构和第一主控阀,第二执行装置包括第二执行机构和第二主控阀,流量控制阀与恒流源连接,流量控制阀用于控制恒流源向第一执行机构和第二执行机构的供油;在第一主控阀处于工作位时,流量控制阀被配置为在第一执行机构的进油油路的压力小于第一执行机构的负载压力与预设压力之和的情况下使恒流源向第一执行机构供油;在第二主控阀处于工作位时,流量控制阀被配置为在第一执行机构的进油油路的压力大于或等于第一执行机构的负载压力与预设压力之和或第一主控阀处于非工作位的情况下使恒流源向第二执行机构供油。
在一些实施例中,第一主控阀被配置为在处于工作位时连通流量控制阀和第一执行机构之间的油路,以及在处于非工作位时切断流量控制阀和第一执行机构之间的油路。
在一些实施例中,流量控制阀包括位于阀一端的第一液控口以及位于阀另一端的第二液控口和弹簧,第一液控口被配置为获取第一执行机构的进油油路的压力,第二液控口被配置为在第一主控阀处于工作位的情况下获取第一执行机构的负载压力,预设压力为流量控制阀的弹簧的弹簧力所对应的压力。
在一些实施例中,流量控制阀包括与恒流源连通的第一油口、与第一执行机构的进油油路连通的第二油口以及与第二执行机构的进油油路连通的第三油口;第一油口与第二油口之间的油道为常通油道,流量控制阀被配置为在第一液控口的压力大于第二液控口的压力和弹簧的弹簧力所对应的压力之和时使第一油口与第三油口之间的油道连通。
在一些实施例中,第一执行装置还包括可调节流阀,可调节流阀设置于流量控制阀和第一主控阀之间,可调节流阀被配置为控制其所在油路的液压油流量,进而控制第一执行机构的速度。
在一些实施例中,第一执行装置还包括可调节流阀,可调节流阀设置于流量控制阀和第一主控阀之间,可调节流阀被配置为控制其所在油路的液压油流量,进而控制第一执行机构的速度,第一液控口被配置为获取可调节流阀的进油油路的压力。
在一些实施例中,第二执行装置还包括设置于流量控制阀与第二主控阀之间的压力补偿阀。
在一些实施例中,作业平台控制系统还包括油箱,第二液控口被配置为在第一主控阀处于非工作位的情况下与油箱连通。
在一些实施例中,作业平台控制系统还包括设置于第二液控口和第一主控阀之间的油路与油箱之间的溢流阀。
在一些实施例中,作业平台控制系统还包括油箱、设置于流量控制阀的第三油口和油箱之间的调节阀,第二液控口被配置为在第一主控阀处于非工作位的情况下与油箱连通,调节阀包括位于阀一端的第三液控口以及位于阀另一端的第四液控口和弹簧,第三液控口用于获取流量控制阀的第三油口的出口压力,第四液控口用于获取第二执行机构的负载压力,调节阀的阀口开度随其两端压力差的变化而变化。
在一些实施例中,第二执行机构包括与第二主控阀连接的多个油口,第二执行装置还包括与多个油口连接的梭阀,梭阀被配置获取第二执行机构的负载压力并反馈至第四液控口。
在一些实施例中,作业平台控制系统还包括蓄能器,蓄能器的油口与第四液控口连通。
在一些实施例中,作业平台控制系统包括一个以上的第二执行装置。
根据本发明的另一个方面,提供一种高空作业平台设备,包括上述的作业平台控制系统。
基于上述技术方案,本发明提供了包括恒流源、流量控制阀、第一执行机构、与第一执行机构对应的第一主控阀、第二执行机构和与第二执行机构对应的第二主控阀的作业平台控制系统。通过设置流量控制阀、第一主控阀和第二主控阀,能够实现在第一主控阀处于工作位时优先向第一执行机构供油,以及在满足了第一执行机构的液压油需求(即第一执行机构的进油油路的压力大于或等于第一执行机构的负载压力与预设压力之和)后,再向第二执行机构供油,从而可以保障第一执行机构的动作的迅速响应性。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
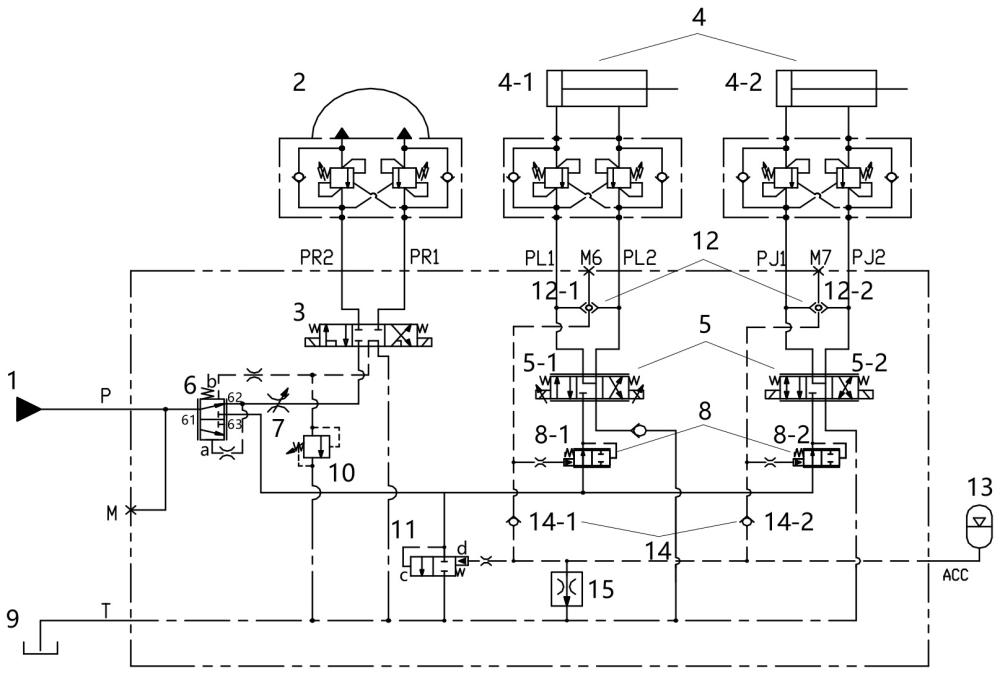
图1示出了本发明作业平台控制系统一个实施例的液压原理图。
图2示出了本发明高空作业平台设备一个实施例的结构示意图。
图3示出了相关技术中高空作业平台控制系统一个实施例的液压原理图。
图中:1、恒流源;2、第一执行机构;3、第一主控阀;4、第二执行机构;4-1、调平油缸;4-2、变幅油缸;5、第二主控阀;5-1、第一比例换向阀;5-2、第二比例换向阀;6、流量控制阀;61、第一油口;62、第二油口;63、第三油口;
7、可调节流阀;8、压力补偿阀;8-1、第一压力补偿阀;8-2、第二压力补偿阀;9、油箱;10、溢流阀;11、调节阀;12、梭阀;12-1、第一梭阀;12-2、第二梭阀;13、蓄能器;14、单向阀;14-1、第一单向阀;14-2、第二单向阀;15、流量阀;
16、作业平台;17、主臂;18、转台;19、安装架;20、液压油源;21、平台摆动油缸;22、平台调平油缸;23、曲臂变幅油缸;24、梭阀;25、换向阀;26、补偿阀;27、单向阀;28、蓄能器;29、三通压力补偿阀;30、流量阀;31、油箱。
具体实施方式
下面将结合本发明实施例中的附图,对实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“中心”、“横向”、“纵向”、“前”、“后”、“左”、“右”、“上”、“下”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
参考图1所示,在本发明提供的作业平台控制系统的一些实施例中,该作业平台控制系统包括恒流源1、第一执行装置、第二执行装置和流量控制阀6。第一执行装置包括第一执行机构2和第一主控阀3,第二执行装置包括第二执行机构4和第二主控阀5。
恒流源1被配置为提供预设流量的液压油;流量控制阀6与恒流源1连接,流量控制阀6用于控制恒流源1向第一执行机构2和第二执行机构4的供油;在第一主控阀3处于工作位时,流量控制阀6被配置为在第一执行机构2的进油油路的压力小于第一执行机构2的负载压力与预设压力之和的情况下使恒流源1向第一执行机构2供油;在第二主控阀5处于工作位时,流量控制阀6被配置为在第一执行机构2的进油油路的压力大于或等于第一执行机构2的负载压力与预设压力之和或第一主控阀3处于非工作位的情况下使恒流源1向第二执行机构4供油。
第一主控阀3的结构形式可以有多种选择,在一些实施例中,第一主控阀3为三位五通电磁阀。
参考图1所示,流过该三位五通电磁阀的液压油的流动方向可调,从而可以实现对第一执行机构2的动作方向的控制。
第二主控阀5的结构形式也可以有多种选择,在一些实施例中,第二主控阀5为比例换向阀。
参考图1所示,通过该比例换向阀的液压油的流动方向、流量的多少均可调节,从而可以实现对第二执行机构4的动作的方向和速度的控制。
参考图1所示,第一主控阀3被配置为在处于工作位时连通流量控制阀6和第一执行机构2之间的油路,以及在处于非工作位时切断流量控制阀6和第一执行机构2之间的油路。
具体的,第一主控阀3包括图1所示的左右两侧的工作位以及中间的非工作位,第一主控阀3可通过在上述三个位置之间切换来控制恒流源1向第一执行机构2供油的油路的通断和方向。
在第一主控阀3切换至左侧或右侧的工作位时,流量控制阀6能够使恒流源1优先向第一执行机构供油,在满足第一执行机构2的液压油需求(即第一执行机构2的进油油路的压力大于或等于第一执行机构2的负载压力与预设压力之和)后,再向第二执行机构4供油,从而可以保障第一执行机构2的动作的迅速响应性。
参考图1所示,在一些实施例中,流量控制阀6包括位于阀一端的第一液控口a以及位于阀另一端的第二液控口b和弹簧,第一液控口a被配置为获取第一执行机构2的进油油路的压力,第二液控口b被配置为在第一主控阀3处于工作位的情况下获取第一执行机构2的负载压力,预设压力为流量控制阀6的弹簧的弹簧力所对应的压力。
通过上述设置,流量控制阀6的阀芯的移动能够通过流量控制阀6的两端的压力差来控制。
具体的,参考图1所示,在一些实施例中,流量控制阀6包括与恒流源1连通的第一油口61、与第一执行机构2的进油油路连通的第二油口62以及与第二执行机构4的进油油路连通的第三油口63;第一油口61与第二油口62之间的油道为常通油道,流量控制阀被配置为在第一液控口a的压力大于第二液控口b的压力和弹簧的弹簧力所对应的压力之和时使第一油口61与第三油口63之间的油道连通。
在第一主控阀3处于工作位时,来自于恒流源1的液压油经由第一油口61与第二油口62之间的油道流向第一执行机构2的进油油路,从而实现向第一执行机构2的供油。在上述供油过程中,第一执行机构2的进油油路的压力逐步增大,第一液控口a的压力也逐步增大,在满足第一执行机构2的供油需求后,第一液控口a的压力增大至大于第二液控口b的压力和弹簧的弹簧力所对应的压力之和,从而流量控制阀6两端的压差推动流量控制阀6的阀芯移动,使第一油口61与第三油口63之间的油道连通,将多余的液压油供给下游,进而恒流源1能够向第二执行机构4供油。
在上述实施例中,在满足第一执行机构2的供油需求后,第一油口61与第二油口62之间的油道、第一油口61与第三油口63之间的油道可以同时处于连通状态。
在一些实施例中,第一执行装置还包括可调节流阀7,可调节流阀7设置于流量控制阀6和第一主控阀3之间,可调节流阀7被配置为控制其所在油路的液压油流量,进而控制第一执行机构2的速度。
在上述实施例中,可调节流阀7的进油口的压力实际上与流量控制阀6的第一液控口a的压力相等,可调节流阀7的出油口的压力实际上与流量控制阀6的第二液控口b的压力(即第一执行机构2的负载压力)相等。则在第一液控口a的压力大于第二液控口b的压力和弹簧的弹簧力所对应的压力之和的情况下,参考图1中所示方向,流量控制阀6的阀芯向上移动,使得第一油口61与第二油口62之间的油道的开口变小,从而使第一油口61与第二油口62之间的油道处损耗的压力增加,进而使可调节流阀7的进油口处的压力降低,在第一液控口a的压力小于第二液控口b的压力和弹簧的弹簧力所对应的压力之和的情况下,参考图1中所示方向,流量控制阀6的阀芯向下移动,使得第一油口61与第二油口62之间的油道的开口增大,从而使第一油口61与第二油口62之间的油道处损耗的压力减小,进而使可调节流阀7的进油口处的压力增大。
经过上述过程,最终使第一液控口a的压力等于第二液控口b的压力和弹簧的弹簧力所对应的压力之和,即可调节流阀7的进油口的压力等于可调节流阀7的出油口的压力和弹簧的弹簧力所对应的压力之和,即可调节流阀7的进出油口两端的压力差最终与流量控制阀6的弹簧的弹簧力所对应的压力相等,也即实现了可调节流阀7的进出油口的压差恒定。也就是说,可调节流阀7的进油口的压力不受可调节流阀7的出油口的压力(即第一执行机构2的负载压力)的影响,一方面可以保证恒流源1至流量控制阀6之间油路的稳定性不受第一执行机构2的负载变化的影响,从而保证供油过程的可靠性和安全性,另一方面是保证通过可调节流阀7的液压油的流量不受第一执行机构2的负载变化的影响,从而保证第一执行机构2的动作的稳定性。
在上述实施例中,通过调节可调节流阀7的流通阻力,可以对流经可调节流阀7的液压油的流量进行控制,从而满足不同工况下对第一执行机构2的速度调节的需求。
在一些实施例中,第一执行装置还包括可调节流阀7,可调节流阀7设置于流量控制阀6和第一主控阀3之间,流量控制阀6包括位于阀一端的第一液控口a以及位于阀另一端的第二液控口b和弹簧,第一液控口a被配置为获取可调节流阀7的进油油路的压力。
在上述实施例中,可调节流阀7设置于流量控制阀6和第一主控阀3之间,则可调节流阀7的进油油路的压力也就是第一执行机构2的进油油路的压力。
参考图1所示,在一些实施例中,第二执行装置还包括设置于流量控制阀6与第二主控阀5之间的压力补偿阀8。
在上述实施例中,压力补偿阀8的一端设有弹簧以及用于获取第二执行机构4的负载压力的液控口,另一端设有用于获取第二执行机构4的进油油路的压力的液控口。
通过上述设置,在第二执行机构4的进油油路的压力大于第二执行机构4的负载压力与弹簧的弹簧力所对应的压力之和的情况下,压力补偿阀8的阀口开度减小,此时压力补偿阀8处损耗的压力增加,从而使第二执行机构4的进油油路的压力降低;在第二执行机构4的进油油路的压力小于第二执行机构4的负载压力与弹簧的弹簧力所对应的压力之和的情况下,压力补偿阀8的阀口开度增大,此时压力补偿阀8处损耗的压力减小,从而使第二执行机构4的进油油路的压力增大。经过上述过程,最终使第二执行机构4的进油油路的压力等于第二执行机构4的负载压力与弹簧的弹簧力所对应的压力之和,即第二执行机构4的进油油路的压力与第二执行机构4的负载压力的差值等于弹簧的弹簧力所对应的压力,也就是实现第二主控阀5进出油口的压差恒定。从而在不同负载的情况下,当第二主控阀5的阀口开度为一定时,均可以使第二执行机构4的动作执行具有相同的响应速度,进而保证系统的稳定性。
参考图1所示,在一些实施例中,作业平台控制系统还包括油箱9,第二液控口b被配置为在第一主控阀3处于非工作位的情况下与油箱9连通。
在第一主控阀3处于非工作位的情况下,第二液控口b与油箱9连通,此时压力很小,恒流源1向流量控制阀6的第一油口61输入液压油,液压油经由第二油口62流出并流至第一液控口a,流量控制阀6两端的压差推动其阀芯移动,参考图1中所示方向,流量控制阀6的阀芯向上移动,进而使第一油口61与第三油口63之间的油道连通,从而恒流源1输入的液压油可以经由第三油口63流向第二执行机构4,或者经由第三油口63流向下游的回油油路,进而流回油箱9。
在一些实施例中,作业平台控制系统还包括设置于第二液控口b和第一主控阀3之间的油路(即第一执行机构2的负载反馈油路)与油箱9之间的溢流阀10。
通过设置溢流阀10,则在第一主控阀3处于工作位时,可在第一执行机构2的负载压力过大时通过溢流阀10限压。
参考图1所示,在一些实施例中,作业平台控制系统还包括油箱9、设置于流量控制阀6的第三油口63和油箱9之间的调节阀11,第二液控口b被配置为在第一主控阀3处于非工作位的情况下与油箱9连通,调节阀11包括位于阀一端的第三液控口c以及位于阀另一端的第四液控口d和弹簧,第三液控口c用于获取流量控制阀6的第三油口63的出口压力,第四液控口d用于获取第二执行机构4的负载压力,调节阀11的阀口开度随其两端压力差的变化而变化。
在第一主控阀3和第二主控阀5均处于非工作位时,第四液控口d获取到第二执行机构4的负载压力为零,恒流源1输入的液压油克服调节阀11的弹簧压力,使调节阀11的阀口打开,液压油直接回流至油箱9,此时系统处于低压卸荷状态。在第二主控阀5处于工作位时,第二执行机构4的负载压力反馈至第四液控口d,恒流源1输入的液压油需要克服调节阀11的弹簧的弹簧力和第二执行机构4的负载压力作用在调节阀11的阀芯上的推力,调节阀11的阀芯移动,从而使得调节阀11的阀口开度减小。通过上述过程,调节阀11的阀口的开度根据第二执行机构4的负载压力的变化能够实现动态调节,以维持调节阀11的进口压力比第二执行机构4的负载压力高出一个弹簧的弹簧力对应的压力值。
参考图1所示,在一些实施例中,第二执行机构4包括与第二主控阀5连接的多个油口,第二执行装置还包括与多个油口连接的梭阀12,梭阀12被配置获取第二执行机构4的负载压力并反馈至第四液控口d。
在一些实施例中,第二执行装置还包括设置于梭阀12和第四液控口d之间的单向阀14。
参考图1所示,在一些实施例中,作业平台控制系统还包括蓄能器13,蓄能器13的油口与第四液控口d连通。
蓄能器13能够实现对第二执行机构4的负载反馈压力进行滤波的功能,可以减小负载压力的变化对调节阀11的阀芯位移的影响,防止引起系统振荡,保证第二执行机构4的动作执行的平稳性。
在一些实施例中,作业平台控制系统还包括设置于蓄能器13和油箱9之间的油路上的流量阀15。
通过设置流量阀15,则在第二主控阀5由工作位切换至非工作位后,能够通过流量阀15释放蓄能器13和油箱9之间的油路上的负载反馈压力,使调节阀11打开,实现第二执行机构4的进油油路快速卸压。
在一些实施例中,第二执行机构4执行动作的流量需求大于第一执行机构2执行动作的流量需求。
例如,第一执行机构2可以是执行平台的摆动动作的摆动油缸,第二执行机构4可以是对平台进行调平的调平油缸,通常摆动动作的流量需求(约1L/min)大概为调平动作的20%。
参考图3所示,在相关技术中,高空作业平台控制系统包括液压油源20、油箱31、蓄能器28、平台摆动油缸21、平台调平油缸22和曲臂变幅油缸23,在液压油源20向上述三个油缸的供油油路上设有补偿阀26和换向阀25,在上述三个油缸向油箱31的回油油路上设有梭阀24、单向阀27、三通压力补偿阀29和流量阀30。
在平台调平油缸22和曲臂变幅油缸23的动作执行的流量需求均大于平台摆动油缸21的动作执行的流量需求的情况下,不区分上述三个油缸液压油的流量分配的优先级,则在对平台调平油缸22或曲臂变幅油缸23供油时,经换向阀25流向平台调平油缸22或曲臂变幅油缸23的液压油的流量较大,液压油经由梭阀24、单向阀27可以快速到达三通压力补偿阀29的负载感应口,同时实现给蓄能器28的快速充能,使得系统建压迅速,而在对平台摆动油缸21供油时,经换向阀25流向平台摆动油缸21的液压油的流量较小,在这种情况下给蓄能器28充能就需要较长时间,这将造成系统建压缓慢,平台摆动油缸21的启动延时。
因此本发明通过设置流量控制阀6,使恒流源1优先向第一执行机构2供油,在满足第一执行机构2的液压油需求后,再向第二执行机构4供油,可以保障第一执行机构2的动作的迅速响应性。
在一些实施例中,作业平台控制系统包括一个以上的第二执行装置。
第二执行装置可以是一个或者多个,第二执行装置的第二执行机构4可以是摆动油缸、调平油缸、变幅油缸、马达等机构,根据实际需求设置即可,多个第二执行装置可采用并联的方式连接,例如,在图1所示的实施例中,作业平台控制系统包括两个第二执行装置,一个第二执行装置包括调平油缸4-1、第一梭阀12-1、第一比例换向阀5-1、第一压力补偿阀8-1和第一单向阀14-1,另一个第二执行装置包括变幅油缸4-2、第二梭阀12-2、第二比例换向阀5-2、第二压力补偿阀8-2和第二单向阀14-2。
下面对本发明作业平台控制系统的一个实施例的具体结构及工作过程进行说明:
参考图1所示,本发明作业平台控制系统包括恒流源1、第一执行装置、第二执行装置、流量控制阀6、油箱9、溢流阀10、调节阀11、蓄能器13和流量阀15,其中,第一执行装置包括第一执行机构2、第一主控阀3和可调节流阀7,第二执行装置包括第二执行机构4、梭阀12、第二主控阀5、压力补偿阀8和单向阀14,压力补偿阀8设置于流量控制阀6与第二主控阀5之间,单向阀14设置于梭阀12和调节阀11之间,溢流阀10设置于第一执行机构2的负载反馈油路与油箱9之间的油路上,调节阀11设置于流量控制阀6的第三油口63和油箱9之间的油路上,流量阀15设置于蓄能器13和油箱9之间的油路上。
在本实施例中,流量控制阀6是两位三通液控阀,流量控制阀6设有第一油口61、第二油口62和第三油口63,其中,第一油口61与恒流源1连通,第二油口62与可调节流阀7的进油口连通,第三油口63用于连接第二执行机构4的进油油路。
在本实施例中,第一执行机构2是摆动油缸,可调节流阀7是液阻可调的节流阀,第一主控阀3是三位五通电磁阀,作业平台控制系统包括两个第二执行装置,两个第二执行装置的第二执行机构4分别是调平油缸4-1和变幅油缸4-2,第二主控阀5是比例换向阀,梭阀12是梭阀。
在本发明作业平台控制系统的工作过程中,恒流源1向流量控制阀6输入恒定流量的液压油,当第一主控阀3不得电处于中位(即非工作位)时,流量控制阀6的弹簧腔与油箱9连通,流量控制阀6的阀芯会在压差的作用下向上移动,液压油经流量控制阀6的下位全部流向下游。
当第一主控阀3得电时切换至工作位时,流量控制阀6将恒流源1输入的液压油通过第二油口62首先输送给第一执行机构2,用于驱动作业平台摆动,在满足作业平台摆动的流量需求后流量控制阀6再将多余的液压油通过第三油口63供给下游。
以本实施例中两个第二执行装置的其中一个为例,当第一比例换向阀5-1不得电处于中位(即非工作位)时,“无负载压力”信息经第一梭阀12-1和第一单向阀14-1反馈至调节阀11的第四液控口d(即负载感应口),液压油克服调节阀11的弹簧的弹簧力,推动阀芯右移打开调节阀11的阀口,由流量控制阀6供过来的液压油全部经调节阀11流回油箱9,此时系统压力为流量控制阀6的弹簧的弹簧力对应的压力值加上调节阀11对应的压力值(一般为3MPa左右),系统处于低压卸荷状态。
当任何一个第二执行装置的第二主控阀5得电切换至工作位时,以作业平台的调平过程为例,第一比例换向阀5-1切换至工作位,调平负载压力经第一梭阀12-1和第一单向阀14-1反馈至调节阀11的负载感应口,液压油克服调节阀11的弹簧的弹簧力和负载压力作用在调节阀11的阀芯上的推力,推动阀芯右移打开调节阀11的阀口,调节阀11的阀口开度根据负载压力变化动态调节,始终维持调节阀11的进口压力比负载压力高出一个弹簧的弹簧力对应的压力值。
在本实施例中,液压阀件采用薄刃型结构的可调节流阀,薄刃型液阻的压力损失以局部压力损失为主,从而减少油温变化对控制精度的影响,提高控制性能。
通过对本发明作业平台控制系统的多个实施例的说明,可以看到本发明作业平台控制系统至少具有以下优点:1、能够实现优先向第一执行机构供油,在满足第一执行机构的液压油需求后,再向第二执行机构供油,从而可以保障第一执行机构的动作的迅速响应性;2、流经第一主控阀的液压油的流量不受第一执行机构的负载变化的影响,从而保证第一执行机构的动作的稳定性,减少负载的变化对系统带来的冲击;3、能够对第二执行机构的负载反馈压力进行滤波,减小负载压力的变化对调节阀的影响,防止引起系统振荡。
基于上述的作业平台控制系统,本发明还提出一种高空作业平台设备,参考图2所示,该高空作业平台设备包括上述的作业平台控制系统、作业平台16、主臂17、转台18和安装架19等,主臂17连接于转台18和作业平台16之间,调平油缸4-1、变幅油缸4-2和第一执行机构2(摆动油缸)设置于主臂17和作业平台16之间,安装架19安装于作业平台16上,作业平台控制系统中的阀结构安装于安装架19上。
上述各个实施例中作业平台控制系统所具有的积极技术效果同样适用于该高空作业平台设备,这里不再赘述。
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制;尽管参照较佳实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:在不脱离本发明原理的前提下,依然可以对本发明的具体实施方式进行修改或者对部分技术特征进行等同替换,这些修改和等同替换均应涵盖在本发明请求保护的技术方案范围当中。
- 高空作业平台的调平控制系统、调平控制方法及高空作业平台
- 高空作业平台车及高空作业平台车承载重量检测方法
- 自行式高空作业平台的底盘及自行式高空作业平台
- 臂式高空作业平台控制系统及方法、臂式高空作业平台
- 高空作业平台的升降控制系统及高空作业平台