基于对称光学成像的桥梁挠度、相对位移和相对转角测量传感器及方法
文献发布时间:2024-01-17 01:26:37
技术领域
本发明属于桥梁工程检测及监测技术领域,涉及一种基于对称光学成像的桥梁挠度、相对位移和相对转角测量传感器及方法。
背景技术
桥梁挠度是桥梁结构的一项重要指标,在桥梁运营养护检测(监测)中均需要进行桥梁挠度测量。进行桥梁挠度测量,需要采用精度高、适用性好的桥梁挠度测量传感器。目前,桥梁静动挠度测量所采用的传感器种类较多,但在实际应用中,还存在诸多不足,不能很好地满足和适应桥梁挠度的测量需要。如加速度计传感器,仅能用于桥梁动挠度测量,不能满足桥梁静挠度测量;基于液体连通管的传感器仅能测量竖向挠度,不能进行竖向挠度和横向位移的二维测量;GPS类传感器的检测精度仅在厘米级,传感器测量精度低;加速计传感器、倾角传感器和陀螺仪传感器等惯性类传感器检测误差大、精度低;激光挠度仪、光电挠度仪的传感器,使用时需要一个稳定的安装平台;激光扫描仪、微波干涉仪的传感器,仅能在桥下的岸边使用;各类位移计传感器,需要在桥下搭设稳定的支架,现场使用受到极大限制。
如何直接在桥梁上便捷地实现桥梁静动挠度值的高精度、实时测量,一直是国内外桥梁试验检测和监测工程中急需解决的技术难题。
发明内容
本发明实施例的目的在于提供一种基于对称光学成像的桥梁挠度测量传感器,以解决现有的桥梁挠度测量传感器无法同时实现多功能、高精度测量,无法实现便捷安装的问题。
本发明实施例的另一目的在于提供一种基于对称光学成像的桥梁相对位移和相对转角测量传感器及方法,以解决现有的基于光学成像传感器的桥梁挠度测量传感器无法进行两个测站点之间的相对位移与相对转角测量的问题。
本发明实施例所采用的第一个技术方案是:基于对称光学成像的桥梁挠度测量传感器,包括:
左光学成像组件,左光学成像组件沿其光学成像方向对左侧的物体成像;
右光学成像组件,右光学成像组件沿其光学成像方向对右侧的物体成像;
左定向发光光源,左定向发光光源向左发射定向光束;
右定向发光光源,右定向发光光源向右发射定向光束。
进一步的,所述的左光学成像组件、右光学成像组件、左定向发光光源和右定向发光光源均安装在第一安装座上;
所述的第一安装座包括多功能底座和三脚支撑架,所述的多功能底座包括:
上连接板,左光学成像组件、右光学成像组件、左定向发光光源和右定向发光光源均安装在上连接板上;
水平旋转调节结构,水平旋转调节结构由旋转部分和固定部分转动连接,水平旋转调节结构的旋转部分与上连接板底部固定连接;
高度调节结构,高度调节结构顶部与水平旋转调节结构的固定部分固定连接;
下连接板,下连接板与高度调节结构的底部连接,且下连接板安装在三脚支撑架上。
进一步的,所述的上连接板上安装有测距传感器-倾角传感器-测高传感器模块;
所述的下连接板上安装有数据采集处理器;
所述的第一安装座上的左光学成像组件、右光学成像组件、测距传感器-倾角传感器-测高传感器模块的输出端均与其数据采集处理器的不同输入端电连接。
进一步的,所述的左光学成像组件以及右光学成像组件通过俯仰角度调节装置安装在多功能底座上;
倾角传感器安装在所述的左光学成像组件以及右光学成像组件上。
进一步的,所述的左定向发光光源和右定向发光光源通过俯仰角度调节装置安装在多功能底座。
本发明实施例所采用的第二个技术方案是:基于对称光学成像的桥梁相对位移和相对转角测量传感器,包括:
第一传感器,第一传感器设置在测站点A;
第二传感器,第二传感器设置在测站点B,测站点B位于测站点A右侧;
所述的第一传感器包括右光学成像组件和右定向发光光源;
所述的第二传感器包括左光学成像组件和左定向发光光源;
所述的第一传感器的右光学成像组件与第二传感器的左定向发光光源对应,右光学成像组件对左定向发光光源成像;
所述的第二传感器的左光学成像组件与第一传感器的右定向发光光源对应,左光学成像组件对右定向发光光源成像。
进一步的,所述的第一传感器安装在第二安装座上,第二传感器安装在第三安装座上,第二安装座和第三安装座与如上所述的基于对称光学成像的桥梁挠度测量传感器的第一安装座结构一致;
所述的第二安装座上的右光学成像组件、测距传感器-倾角传感器-测高传感器模块的输出端均与其数据采集处理器的不同输入端电连接;
所述的第三安装座上的左光学成像组件、测距传感器-倾角传感器-测高传感器模块的输出端均与其数据采集处理器的不同输入端电连接。
进一步的,所述的第一传感器和第二传感器采用如上所述的基于对称光学成像的桥梁挠度测量传感器。
本发明实施例所采用的第三个技术方案是:基于对称光学成像的桥梁相对位移和相对转角测量方法,采用如上所述的基于对称光学成像的桥梁相对位移和相对转角测量传感器测量测站点A与测站点B之间的相对位移和相对转角,以测站点A为参考基点,在此基础上测量测站点B相对于测站点A的相对位移和相对转角,具体过程如下:
A
Δ
进一步的,按照以下过程,实现所述的测站点B和测站点A之间的相对转角测量:
(1)当Δ
(2)当Δ
(Δ
(3)当Δ
本发明实施例的有益效果是:
(1)测量功能多:在桥梁挠度测站点布设的基于对称光学成像的桥梁挠度测量传感器,同时具有可以向两个方向反向发射定向光束的定向发光光源和根据两个方向相向发射的定向光束对应的定向发光光源进行成像的光学成像组件;由此可以进行两个测站点之间的相对位移(桥梁挠度)和相对转角测量,不仅可以用于中小跨径桥梁静动挠度测量,也适用于大跨桥梁静动挠度测量;
(2)测量精度高:基于对称光学成像的桥梁挠度测量传感器可以直接布设在相邻两测站点上,通过减小测站点之间的水平距离可以有效减小大气湍流的影响,提高桥梁挠度测量精度,可以满足桥梁挠度不同测量精度的要求;同时高分辨率光电芯片与高分辨率镜头组合,可以进行高分辨高速采样,可用于桥梁静动挠度的高精度测量,测量精度达到0.01mm以上;
(3)使用操作简单:本发明实施例的基于对称光学成像的桥梁挠度测量传感器,集对称的光学成像组件、对称的定向发光光源、倾角传感器、测高传感器、测距传感器、数据采集处理器、可方位调节的多功能底座及精密结构等于一体,进行桥梁静动挠度测量时,可以直接将基于对称光学成像的桥梁挠度测量传感器安装布设在桥梁的桥面上,不需要安装在桥梁以外的稳定平台上,进行桥梁挠度测量时,只需要在桥面上通过简单的布设,即可进行桥梁挠度以及相邻测站点间的相对位移和相对转角测量;
(4)通用性和互换性好:本发明实施例的基于对称光学成像的桥梁挠度测量传感器的通用性和互换性好,进行桥梁挠度测量,可以在桥面上布设通用的基于对称光学成像的桥梁挠度测量传感器,不仅可应用于桥梁静动挠度检测,还可以应用于桥梁挠度的长期监测,同时还可以应用于其它基础设施变形检测和监测,如大坝位移,建筑物结构变形等。
综上所述,本发明实施例的基于对称光学成像的桥梁挠度测量传感器,同时实现了多功能、高精度测量以及便捷安装,解决了现有的桥梁挠度测量传感器无法同时实现多功能、高精度测量、便捷测量的问题;本发明实施例的基于对称光学成像的桥梁相对位移和相对转角测量传感器及方法,可以测量两个测站点之间的相对位移和相对转角,具有较高的应用前景,解决了现有基于光学成像传感器的桥梁挠度测量传感器无法测量两个测站点之间的相对位移和相对转角的问题。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
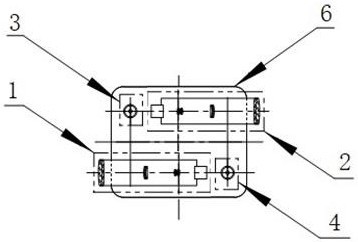
图1是实施例1的基于对称光学成像的桥梁挠度测量传感的俯视结构示意图。
图2是实施例1的基于对称光学成像的桥梁挠度测量传感的主视结构示意图。
图3是多功能底座的结构示意图。
图4是三脚支撑架的结构示意图。
图5是实施例2的基于对称光学成像的桥梁挠度测量传感的结构布设示意图。
图6是实施例2的基于对称光学成像的桥梁挠度测量传感的第一测量状态图。
图7是实施例2的基于对称光学成像的桥梁挠度测量传感的第二测量状态图。
图8是实施例2的基于对称光学成像的桥梁挠度测量传感的第三测量状态图。
图中,1.左光学成像组件,2.右光学成像组件,3.左定向发光光源,4.右定向发光光源,5.光学成像方向,6.多功能底座,6-1.上连接板,6-2.测距传感器-倾角传感器-测高传感器模块,6-3.高度调节结构,6-4.水平旋转调节结构,6-5.数据采集处理器,6-6.下连接板,7.三角支撑架,7-1.三角架固定座,7-2.支腿连接座,7-3.支腿,7-4.支腿底座,8.第一传感器,9.第二传感器,10.桥面。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
本实施例提供一种基于对称光学成像的桥梁挠度测量传感器,如图1所示,包括:
左光学成像组件1,左光学成像组件1沿其光学成像方向5对左侧的物体成像;
右光学成像组件2,右光学成像组件2沿其光学成像方向5对右侧的物体成像;
左定向发光光源3,左定向发光光源3向左发射定向光束;
右定向发光光源4,右定向发光光源4向右发射定向光束。
在一些实施例中,如图2~3所示,左光学成像组件1、右光学成像组件2、左定向发光光源3和右定向发光光源4均安装在第一安装座上,第一安装座包括多功能底座6和三脚支撑架7,所述的多功能底座6包括:
上连接板6-1,左光学成像组件1、右光学成像组件2、左定向发光光源3和右定向发光光源4均安装在上连接板6-1上;
水平旋转调节结构6-4,水平旋转调节结构6-4由旋转部分和固定部分转动连接,水平旋转调节结构6-4的旋转部分与上连接板6-1底部固定连接,水平旋转调节结构6-4的旋转部分转动,调节上连接板6-1上的左光学成像组件1、右光学成像组件2、左定向发光光源3和右定向发光光源4的水平方位;
高度调节结构6-3,高度调节结构6-3顶部与水平旋转调节结构6-4的固定部分固定连接,通过高度调节结构6-3调节上连接板6-1上的左光学成像组件1、右光学成像组件2、左定向发光光源3和右定向发光光源4的高度;
下连接板6-6,下连接板6-6与高度调节结构6-3的底部连接,且下连接板6-6安装在三脚支撑架7上;
其中:
上连接板6-1上安装有测距传感器-倾角传感器-测高传感器模块6-2,测高传感器用于测量左光学成像组件1、右光学成像组件2、左定向发光光源3和右定向发光光源4距离桥梁桥面的初始高度,消除在进行桥梁挠度测量初始确定桥梁线型时,相邻两测站点的基于对称光学成像的桥梁挠度测量传感器的安装高度不一致引起的测量误差。倾角传感器用于测量左光学成像组件1、右光学成像组件2与水平面的倾角,校正左光学成像组件1、右光学成像组件2倾斜引起的测量误差。测距传感器用于测量当前测站点与相邻测站点之间的水平距离;
下连接板6-6上安装有数据采集处理器6-5,第一安装座上的左光学成像组件1、右光学成像组件2、测距传感器-倾角传感器-测高传感器模块6-2的输出端均与其数据采集处理器6-5的不同输入端电连接,每个数据采集处理器6-5根据左光学成像组件1、右光学成像组件2、测距传感器-倾角传感器-测高传感器模块6-2的测量数据,计算当前测站点相对于相邻测站点的位移和转角。
在一些实施例中,所述的左光学成像组件1以及右光学成像组件2,和/或左定向发光光源3和右定向发光光源4通过俯仰角度调节装置安装在多功能底座6(上连接板6-1)上,实现左光学成像组件1以及右光学成像组件2,和/或左定向发光光源3以及右定向发光光源4的俯仰角度调节。且此时左光学成像组件1以及右光学成像组件2上,和/或左定向发光光源3和右定向发光光源4上,均安装有倾角传感器,分别测量左光学成像组件1、右光学成像组件2、左定向发光光源3、右定向发光光源4的倾角,校正左光学成像组件1、右光学成像组件2、左定向发光光源3、右定向发光光源4倾斜引起的测量误差。
在一些实施例中,如图4所示,三角支撑架7包括三角架固定座7-1、支腿连接座7-2、支腿7-3和支腿底座7-4,多功能底座6安装在三角架固定座7-1上,支腿7-3通过支腿连接座7-2安装在三角架固定座7-1底部,支腿7-3通过其底部的支腿底座7-4固定在桥面10等需要监测的结构上。
实施例2
本实施例提供一种基于对称光学成像的桥梁相对位移和相对转角测量传感器,如图7所示,包括:
第一传感器8,第一传感器8设置在测站点A;
第二传感器9,第二传感器9设置在测站点B,测站点B位于测站点A右侧;
所述的第一传感器8包括右光学成像组件2和右定向发光光源4;
所述的第二传感器9包括左光学成像组件1和左定向发光光源3;
所述的第一传感器8的右光学成像组件2与第二传感器9的左定向发光光源3对应,右光学成像组件2对左定向发光光源3成像;
所述的第二传感器9的左光学成像组件1与第一传感器8的右定向发光光源4对应,左光学成像组件1对右定向发光光源4成像。
在一些实施例中,所述的第一传感器8安装在第二安装座上,第二传感器9安装在第三安装座上,第二安装座和第三安装座与实施例1的第一安装座结构一致;
第二安装座上的右光学成像组件2、测距传感器-倾角传感器-测高传感器模块6-2的输出端均与其数据采集处理器6-5的不同输入端电连接,第二安装座上的数据采集处理器6-5根据右光学成像组件2、测距传感器-倾角传感器-测高传感器模块6-2的测量数据,计算测站点B相对于测站点A的位移和转角;
第三安装座上的左光学成像组件1、测距传感器-倾角传感器-测高传感器模块6-2的输出端均与其数据采集处理器6-5的不同输入端电连接,第三安装座上的数据采集处理器6-5根据左光学成像组件1、测距传感器-倾角传感器-测高传感器模块6-2的测量数据,计算测站点A相对于测站点B的位移和转角。
在一些实施例中,所述的第一传感器8的右光学成像组件2和第二传感器9的左光学成像组件1通过俯仰角度调节装置安装,能够调节使第一传感器8的第一传感器8的右光学成像组件2与第二传感器9的左定向发光光源3对准,使第二传感器9的左光学成像组件1与第一传感器8的右定向发光光源4对准,且测距传感器-倾角传感器-测高传感器模块6-2的倾角传感器安装在第一传感器8的右光学成像组件2和第二传感器9的左光学成像组件1上,测量第一传感器8的右光学成像组件2和第二传感器9的左光学成像组件1的倾角,校正第一传感器8的右光学成像组件2和第二传感器9的左光学成像组件1倾斜引起的测量误差。
在一些实施例中,所述的第一传感器8的右定向发光光源4和第二传感器9的左定向发光光源3通过俯仰角度调节装置安装,能够调节使第一传感器8的右定向发光光源4与第二传感器9的左光学成像组件1对准,使第二传感器9的左定向发光光源3与第一传感器8的右光学成像组件2对准,且测距传感器-倾角传感器-测高传感器模块6-2的倾角传感器安装在第一传感器8的右定向发光光源4和第二传感器9的左定向发光光源3上,测量第一传感器8的右定向发光光源4和第二传感器9的左定向发光光源3的倾角,校正第一传感器8的右光学成像组件2和第二传感器9的左定向发光光源3倾斜引起的测量误差。
在一些实施例中,如图5所示,所述的第一传感器8和第二传感器9采用实施例1所述的基于对称光学成像的桥梁挠度测量传感器。
实施例3
本实施例提供一种基于对称光学成像的桥梁相对位移和相对转角测量方法,采用实施例2提供的基于对称光学成像的桥梁相对位移和相对转角测量传感器测量测站点A与测站点B之间的相对位移和相对转角,以测站点A为参考基点,也就是不考虑测站点A的位移和转角,在此基础上可以测量出测站点B相对于测站点A的相对位移和相对转角,具体过程如下:
A
Δ
(1)当Δ
(2)当Δ
(Δ
(3)当Δ
提出一种集左光学成像组件1、右光学成像组件2、左定向发光光源3、右定向发光光源4、多功能底座6、三角支撑架7于一体的桥梁挠度测量传感器,可以同时测量桥梁静动挠度,可以测量桥梁竖向挠度和桥梁横向位移,实现了多种测量功能,可以直接安装在桥面上的桥梁挠度测站点,通过安装在桥面上相邻测站点的基于对称光学成像的桥梁挠度测量传感器,可以获得相邻桥梁挠度测站点之间的相对位移量和相对转角量。同时测站点之间的水平距离相对小,可以有效减小大气湍流的影响,提高桥梁挠度测量精度,安装布设方便,使用操作简单方便。
以上所述仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进等,均包含在本发明的保护范围内。
- 基于对称激光器的桥梁挠度、相对位移和相对转角测量传感器及方法
- 基于对称成像位移传感器的桥梁挠度及梁端转角测量系统及方法