基于编队卫星的空间电磁消旋地面模拟实验系统及方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及一种基于编队卫星的空间电磁消旋地面模拟实验系统及方法,属于空间目标操控及其地面试验模拟技术领域。
背景技术
目前的外层空间中存在着大量空间碎片。这些空间碎片极度占用轨道资源,大大压缩了太空活动空间,严重威胁在轨航天器的安全,因此有必要进行主动移除。在主动移除空间碎片之前,需要先对其进行消旋操作,以防止空间碎片较为复杂的翻滚运动对航天器可能造成的破坏。
利用电磁作用进行消旋的方法由于风险小且受环境影响小成为了目前的研究热点。然而,电磁作用会随着作用距离的增加出现快速衰减,想要实现理想的消旋效果需要强大的电磁场发生器。而使用超导线圈能够较好的解决这个问题。申请人于2021年08月01日提出的一件申请号为202110724030.7的发明专利申请,其公开了一种基于双星电磁编队卫星的空间翻滚目标非接触消旋方法,使用双星携带超导线圈编队对空间碎片进行电磁消旋。但由于目前的技术限制,该专利申请中提及的方法的在轨验证还较为困难,需要在地面上搭建平台来进行消旋试验模拟。
地面模拟实验有落塔、抛物飞行、悬吊、水浮试验、气浮试验等方法。其中气浮试验环境造价低,建造维护周期短,具有较高的模拟精度,是空间碎片清除任务模拟试验采用的主要模拟方法。现有技术中涉及旋转目标的模拟和电磁消旋的原理验证(如申请号为202010665541.1的发明专利,其公开了一种空间失控翻滚卫星单自由度非接触式消旋模拟测试平台及方法),但均未考虑服务卫星的运动,因此,亟需一种模拟整个电磁编队电磁消旋过程的地面试验模拟系统。
发明内容
本发明是为了解决上述技术问题,进而提供了一种基于编队卫星的空间电磁消旋地面模拟实验系统及方法。
本发明为解决上述技术问题所采用的技术方案是:
基于编队卫星的空间电磁消旋地面模拟实验系统,包括空间目标模拟装置、对称布置在空间目标模拟装置两侧的两个三自由度电磁模拟气浮平台、用于放置空间目标模拟装置及三自由度电磁模拟气浮平台的大理石平台以及分别与控制空间目标模拟装置及三自由度电磁模拟气浮平台信号连接的上位机,其中,通过空间目标模拟装置模拟空间目标在真空条件下的旋转,通过三自由度电磁模拟气浮平台模拟服务卫星对空间目标的消旋动作,以及模拟服务卫星的运动及姿态。
进一步地,所述空间目标模拟装置包括真空罩、外壳体、模拟目标、角度测量装置、轴组件、轴承组件及电机,其中真空罩与外壳体上下连通固接,真空罩外部连接有真空泵,模拟目标安装在真空罩内,角度测量装置安装在外壳体上,轴组件及电机由上到下依次设置在外壳体内,模拟目标与电机的输出轴之间通过轴组件连接,轴组件与外壳体内壁之间通过轴承组件转动连接,轴组件与电机的输出轴之间连接设置有离合器及联轴器。
进一步地,所述轴组件包括由上到下同轴固接的目标安装轴及目标法兰轴,所述模拟目标的底端与目标安装轴固接,所述轴承组件安装在目标法兰轴与外壳体内壁之间;所述轴承组件包括上下同轴布置的两组角接触球轴承及安装在两组角接触球轴承之间的轴承支架。
进一步地,所述外壳体包括由上到下依次连通固接的上部外壳、中部外壳及下部外壳,轴承组件安装在上部外壳内壁与轴组件之间,且轴承组件的下端通过安装在上部外壳内的轴承盖板限位,离合器及联轴器均位于中部壳体内,中部壳体内的底部固装有连接法兰,电机位于下部壳体内且通过连接法兰固定位置。
进一步地,中部外壳上开设有若干通孔,且每个通孔上均对应通过中部盖板密封。
进一步地,外壳体的底部沿周向布置有若干支撑足。
进一步地,所述三自由度电磁模拟气浮平台包括支撑架及安装在支撑架上的超导线圈、线圈控制组件、传感器组件、高压气瓶、飞轮与推进装置,支撑架的底端布置有若干气足,高压气瓶通过气管与若干气足相连,通过线圈控制组件为超导线圈供电及控制超导线圈动作,通过传感器组件测量三自由度电磁模拟气浮平台的姿态和位置以及三自由度电磁模拟气浮平台相对于模拟目标的相对姿态位置,通过飞轮控制三自由度电磁模拟气浮平台的姿态,通过推进装置控制三自由度电磁模拟气浮平台的位置和姿态。
进一步地,所述线圈控制组件包括线圈电源及控制模块。
进一步地,所述传感器组件包括视觉传感器及惯性传感器。
一种采用上述系统的地面模拟实验方法,包括如下步骤:
步骤一、将空间目标模拟装置及三自由度电磁模拟气浮平台放置在大理石平台上;
步骤二、对三自由度电磁模拟气浮平台中的气足通气,对大理石平台进行调平,直至正常通气状态下三自由度电磁模拟气浮平台不产生位移;
步骤三、启动真空泵,对空间目标模拟装置内部抽真空,直至气压表达到指定数值;
步骤四、启动空间目标模拟装置内部的电机,带动模拟目标开始旋转并达到指定转速;
步骤五、上位机发出指令,通过离合器切断电机动力,使模拟目标自由旋转;
步骤六、测量无电磁作用下的模拟目标转速衰减曲线,然后还原空间目标模拟装置;
步骤七、重复执行步骤三及步骤四,同时,上位机向两个三自由度电磁模拟气浮平台发出到达位置指令和位置姿态保持指令,三自由度电磁模拟气浮平台通过推进装置移动到指定位置,并通过飞轮调整至合适的姿态后,进行位置与姿态保持;
步骤八、重复执行步骤五,在切断电机动力的同时,上位机发出指令,使两个超导线圈开始工作,通过飞轮控制三自由度电磁模拟气浮平台的姿态,使超导线圈恒定指向模拟目标;
步骤九、通过推进装置辅助三自由度电磁模拟气浮平台保持正确的规划路径,控制两个超导线圈的电流变化直至消旋结束,并测量有电磁作用下的模拟目标转速衰减曲线;
步骤十、得到数据后,还原空间目标模拟装置及三自由度电磁模拟气浮平台,实验结束。
本发明与现有技术相比具有以下效果:
采用两个对称布置在空间目标模拟装置两侧的三自由度电磁模拟气浮平台,能够更加贴近编队卫星在轨道空间中的消旋任务的真实情况,通过空间目标模拟装置模拟空间目标在真空条件下的旋转,通过三自由度电磁模拟气浮平台模拟服务卫星对空间目标的消旋动作,以及模拟服务卫星的运动及姿态。
附图说明
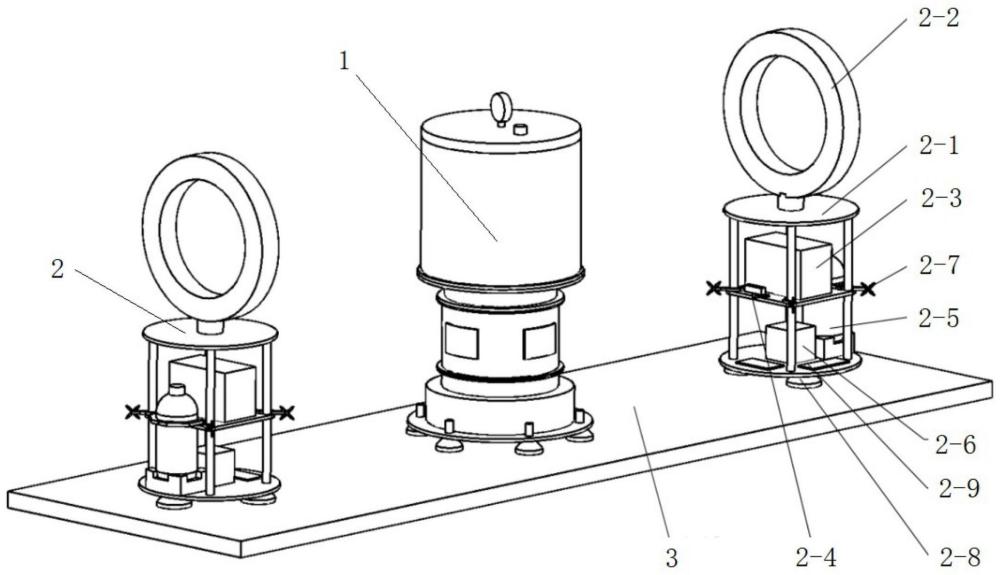
图1为本发明的基于编队卫星的空间电磁消旋地面模拟实验系统的立体结构示意图;
图2为空间目标模拟装置的主剖视示意图;
图3为旋翼推进装置的组成示意图(+x为向前);
图4为喷管推进装置的组成示意图(+x为向前)。
图中:1、空间目标模拟装置;1-1、真空罩;1-1-1、罩主体;1-1-2、密封盖;1-2、外壳体;1-2-1、上部外壳;1-2-2、中部外壳;1-2-3、下部外壳;1-2-4、中部盖板;1-3、模拟目标;1-4-1、目标安装轴;1-4-2、目标法兰轴;1-5-1、角接触球轴承;1-5-2、轴承支架;1-5-3、轴承盖板;1-6、电机;1-7、角度测量装置;1-7-1、光电传感器;1-7-2、光电码盘;1-8、离合器;1-9、联轴器;1-10、第一压力表;1-11、连接法兰;1-12、支撑足;2、三自由度电磁模拟气浮平台;2-1、支撑架;2-2、超导线圈;2-3、线圈控制组件;2-4、传感器组件;2-5、高压气瓶;2-6、飞轮;2-7、推进装置;2-8、气足;2-9、控制系统;2-7-1、锂电池;2-7-2、稳压模块;2-7-3、电子调速器;2-7-7、第一旋翼;2-7-8、第二旋翼;2-7-9、第三旋翼;2-7-10、第四旋翼;2-7-12、第二压力表;2-7-13、减压阀;2-7-14、手动截止阀;2-7-15、电磁阀;2-7-16、第一喷管;2-7-17、第二喷管;2-7-18、第三喷管;2-7-19、第四喷管;2-7-20、第五喷管;2-7-21、第六喷管;2-7-22、第七喷管;2-7-23、第八喷管;3、大理石平台。
具体实施方式
具体实施方式一:结合图1~图4说明本实施方式,,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式,基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
需要说明的是,本发明关于“前”、“后”、“左”、“右”、“内”、“外”、“左侧”、“右侧”、“上部”、“下部”“顶部”“底部”等方向上的描述均是基于附图所示的方位或位置的关系定义的,仅是为了便于描述本发明和简化描述,而不是指示或暗示所述的结构必须以特定的方位构造和操作,因此,不能理解为对本发明的限制。在本发明的描述中,“多个”的含义是两个以上,除非另有明确具体的限定。
在本发明的描述中,除非另有明确规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
一种基于编队卫星的空间电磁消旋地面模拟实验系统,包括空间目标模拟装置1、对称布置在空间目标模拟装置1两侧的两个三自由度电磁模拟气浮平台2、用于放置空间目标模拟装置1及三自由度电磁模拟气浮平台2的大理石平台3以及分别与控制空间目标模拟装置1及三自由度电磁模拟气浮平台2信号连接的上位机,其中,通过空间目标模拟装置1模拟空间目标在真空条件下的旋转,通过三自由度电磁模拟气浮平台2模拟服务卫星对空间目标的消旋动作,以及模拟服务卫星的运动及姿态保持。每个三自由度电磁模拟气浮平台2上均搭载有一个超导线圈2-2,其搭载的超导线圈2-2轴线在空间重合,且经过空间目标模拟装置1的几何中心。
三自由度电磁模拟气浮平台2位置控制精度为±5mm;姿态控制精度为±2°;连续工作时间≥0.5h;负载≥85kg;其携带的超导线圈2-2磁矩大小≥7000Am
大理石平台3级别为00级,其带有调平装置,水平度为0.02mm,区域直线度为0.007mm。
采用两个对称布置在空间目标模拟装置1两侧的三自由度电磁模拟气浮平台2,能够更加贴近编队卫星在轨道空间中的消旋任务的真实情况,通过空间目标模拟装置1模拟空间目标在真空条件下的旋转,通过三自由度电磁模拟气浮平台2模拟服务卫星对空间目标的消旋动作,以及模拟服务卫星的运动及姿态。
所述空间目标模拟装置1包括真空罩1-1、外壳体1-2、模拟目标1-3、角速度测量装置1-7、轴组件、轴承组件及电机1-6,其中真空罩1-1与外壳体1-2上下连通固接,真空罩1-1外部连接有真空泵,模拟目标1-3安装在真空罩1-1内,角速度测量装置(1-7)安装于外壳体(1-2)上,轴组件及电机1-6由上到下依次设置在外壳体1-2内,模拟目标1-3与电机1-6的输出轴之间通过轴组件连接,轴组件与外壳体1-2内壁之间通过轴承组件转动连接,轴组件与电机1-6的输出轴之间连接设置有离合器1-8及联轴器1-9。
如此设计,采用真空罩1-1对模拟目标1-3与外界空气进行隔离,可以很好的降低空气阻力对模拟目标1-3的影响,提高试验的精度;所述真空罩1-1包括罩主体1-1-1及密封盖1-1-2设在罩主体1-1-1顶端的顶盖,且顶盖上连接设置有第一压力表1-10和抽气孔,通过与真空泵相连接,以实现对真空罩1-1内的空气进行抽离。罩主体1-1-1优选为圆筒形结构。真空罩1-1采用PMMA材料,具有较好的透明性、化学稳定性且不会对磁场产生影响。密封盖1-1-2与罩主体1-1-1的厚度≥8mm,以承受真空环境下外界大气的挤压。真空罩1-1带有第一压力表1-10,当第一压力表1-10到达给定气压时,真空泵停止工作。
模拟目标1-3大小为400mm×400mm,为采用铝蜂窝板制成的方形球壳,可以自由安装太阳帆板,能够较好的模拟太空环境中的真实卫星涡流分布情况。除此之外,还可设计为铝合金球壳或铝合金圆柱壳,可以对电磁消旋理论模型进行验证。
通过电机1-6控制轴组件转动,进而带动模拟目标1-3转动,通过离合器1-8实现电机1-6动力的连接与切断,进而实现模拟目标1-3的被动旋转和自由旋转。采用电机1-6对模拟目标1-3进行起旋,可以使模拟目标1-3轻易快速的达到指定转速,使用离合器1-8装置切断动力传递,操作方便且可靠性高。
所述轴组件包括由上到下同轴固接的目标安装轴1-4-1及目标法兰轴1-4-2,所述模拟目标1-3的底端与目标安装轴1-4-1固接,所述轴承组件安装在目标法兰轴1-4-2与外壳体1-2内壁之间;所述轴承组件包括上下同轴布置的两组角接触球轴承1-5-1及安装在两组角接触球轴承1-5-1之间的轴承支架1-5-2。如此设计,角接触球轴承1-5-1采用背对背安装,中间用轴承支架1-5-2隔开。轴承应选用适合在真空环境下的精密轴承,采用二硫化钼等润滑剂进行固体润滑,尽量减小摩擦。
通过角速度测量装置1-7对模拟目标的角速度进行测量,角速度测量装置1-7包括光电传感器1-7-1与光电码盘1-7-2,其中,光电传感器1-7-2安装于外壳体上,光电码盘安装于目标安装轴1-4-1上。
所述外壳体1-2包括由上到下依次连通固接的上部外壳1-2-1、中部外壳1-2-2及下部外壳1-2-3,轴承组件安装在上部外壳1-2-1内壁与轴组件之间,且轴承组件的下端通过安装在上部外壳1-2-1内的轴承盖板1-5-3限位,离合器1-8及联轴器1-9均位于中部壳体内,中部壳体内的底部固装有连接法兰1-11,电机1-6位于下部壳体内且通过连接法兰1-11固定位置。如此设计,轴承盖板1-5-3顶在角接触球轴承1-5-1的底端。下部壳体内部固装有安装板1-13,通过安装板为设备的电源控制等系统提供安装位置。目标法兰轴1-4-2的下端与离合器1-8相连,再通过联轴器1-9连接到电机1-6的输出轴上。
中部外壳1-2-2上开设有若干通孔,且每个通孔上均对应通过中部盖板1-2-4密封。如此设计,通过中部盖板1-2-4及通孔,便于对空间目标模拟装置1进行安装及调试维修。
外壳体1-2的底部沿周向布置有若干支撑足1-12。如此设计,通过支撑足1-12为空间目标模拟装置1提供支撑并便于调节模拟目标1-3的高度。
所述三自由度电磁模拟气浮平台2包括支撑架2-1及安装在支撑架2-1上的超导线圈2-2、线圈控制组件2-3、传感器组件2-4、高压气瓶2-5、飞轮2-6与推进装置2-7,支撑架2-1的底端布置有若干气足2-8,高压气瓶2-5通过气管与若干气足2-8相连,通过线圈控制组件2-3为超导线圈2-2供电及控制超导线圈2-2动作,通过传感器组件2-4测量三自由度电磁模拟气浮平台2的姿态及位置,通过飞轮2-6控制三自由度电磁模拟气浮平台2的姿态,通过推进装置2-7控制三自由度电磁模拟气浮平台2的位置和姿态。如此设计,气足2-8的数量优选为三个,环形均布在支撑架2-1的底端。通过高压气瓶2-5为气足2-8提供高压气体。
所述支撑架2-1为三层架体结构,具体可以为由四根支撑柱连接三层台面结构。为台上其它系统及结构提供支撑与安装接口。超导线圈2-2固定在支撑架2-1的顶端,产生强电磁场;线圈控制组件2-3以及传感器组件2-4均固定在支撑架2-1的中间层台面;高压气瓶2-5及飞轮2-6分别固定在支撑架2-1底层台面,且高压气瓶2-5的上部卡装在支撑架2-1的中间层台面侧部,并采用机械夹手进行夹紧。推进装置2-7安装在支撑架2-1的中间层且沿支撑架2-1周向均部,超导线圈2-2、线圈控制组件2-3、传感器组件2-4、高压气瓶2-5、飞轮2-6与推进装置2-7均与控制系统2-9连接,于支撑架2-1的底层台面安装有控制系统2-9,实现对各部分结构的控制。
三自由度电磁模拟气浮平台2的材料为铝合金,中间层台面为碳纤维板,皆为非磁性材料,避免对空间磁场产生影响。超导线圈2-2为单线双饼线圈,采用YBCO高温超导带材绕制。为保证超导线圈2-2的性能,需要在超导线圈2-2外围注入液氮并使用隔热材料,使超导线圈2-2保持低温环境。
使用推进装置2-7与飞轮2-6相结合,能够模拟多种任务情形。既能够只使用飞轮2-6进行姿态控制模拟电磁编队状态下对目标的消旋过程,又能模拟出现异常状况下采用旋翼进行紧急机动位置控制;
所述推进装置2-7为旋翼推进装置或喷管推进装置。
所述旋翼推进装置包括锂电池2-7-1、稳压模块2-7-2、四个电子调速器2-7-3及四组旋翼,均由控制系统2-9控制,每组旋翼均包括无刷电机及若干桨叶。锂电池2-7-1通过稳压模块2-7-2给四个电子调速器供电,控制系统2-9控制四个电子调速器使四组旋翼转动产生不同推力。通过四组旋翼的推力组合,可以实现三自由度电磁模拟气浮平台2的任意平面运动。四组旋翼分别为第一至第四旋翼,第一旋翼2-7-7与第二旋翼2-7-8同转速工作可以产生净向前的推力;第三旋翼2-7-9与第四旋翼2-7-10同转速工作可以产生净向后的推力;第二旋翼2-7-8与第四旋翼2-7-10同转速工作可以产生净向左的推力;第一旋翼2-7-7与第三旋翼2-7-9同转速工作可以产生净向右的推力。当需要平台旋转时,第一旋翼2-7-7与第四旋翼2-7-10工作可以使平台顺时针转动,第二旋翼2-7-8与第三旋翼2-7-9工作可以使平台逆时针转动。
所述喷管推进装置包括高压气瓶、第二压力表2-7-12、减压阀2-7-13、手动截止阀2-7-14、八个电磁阀2-7-15及八个喷管。其中,八个喷管两两一组沿周向分布在支撑架2-1的外侧,高压气瓶存储高压压缩气体,为喷管推进系统气源,经过手动截止阀2-7-14、减压阀2-7-13和单向阀后,由各电磁阀2-7-15对应控制各喷管喷气。喷管推进装置所采用的高压气瓶与前述三自由度电磁模拟气浮平台2中的高压气瓶可以为同一个,也可以单独设置。通过八个喷管的组合,可以实现三自由度电磁模拟气浮平台2任意平面运动。八个喷管分别为第一至第八喷管,第六喷管2-7-21与第七喷管2-7-22同时工作时,可以使平台向前运动;第二喷管2-7-17与第三喷管2-7-18同时工作时,可以使平台向后运动;第四喷管2-7-19与第五喷管2-7-20同时工作时,可以使平台向左运动;第一喷管2-7-16与第八喷管2-7-23同时工作时,可以使平台向右运动;第二喷管2-7-17与第六喷管2-7-21同时工作时,可以使平台顺时针旋转;第三喷管2-7-18与第七喷管2-7-22同时工作时,可以使平台逆时针旋转。
减压阀2-7-13的数量为两个,串联布置在高压气瓶与各电磁阀2-7-15之间的气体管路上,第二压力表2-7-12的数量为三个,间隔布置在两个减压阀2-7-13的前后气体管路上,手动截止阀2-7-14设置在高压气瓶与其相邻的一个减压阀2-7-13之间,且该手动截止阀2-7-14与高压气瓶之间设置有单向阀,两个减压阀2-7-13之间设置有单向阀。
所述线圈控制组件2-3包括线圈电源及控制模块。
所述传感器组件2-4包括视觉传感器及惯性传感器。如此设计,通过视觉传感器测量自身相对于模拟目标1-3的相对姿态和位置,通过惯性传感器测量自身的绝对姿态和位置,两个传感器组合使用使测量的精度更高。
一种采用上述系统的地面模拟实验方法,包括如下步骤:
步骤一、将空间目标模拟装置1及三自由度电磁模拟气浮平台2放置在大理石平台3上;
步骤二、对三自由度电磁模拟气浮平台2中的气足2-8通气,对大理石平台3进行调平,直至正常通气状态下三自由度电磁模拟气浮平台2不产生位移;
步骤三、启动真空泵,对空间目标模拟装置1内部抽真空,直至气压表达到指定数值;
步骤四、启动空间目标模拟装置1内部的电机1-6,带动模拟目标1-3开始旋转并达到指定转速;
步骤五、上位机发出指令,通过离合器1-8切断电机1-6动力,使模拟目标1-3自由旋转;
步骤六、测量无电磁作用下的模拟目标1-3转速衰减曲线,然后还原空间目标模拟装置1;无电磁作用下的模拟目标1-3转速衰减曲线具体可通过光电传感器和光电码盘实现测量。
步骤七、重复执行步骤三及步骤四,同时,上位机向两个三自由度电磁模拟气浮平台2发出到达位置指令和位置姿态保持指令,三自由度电磁模拟气浮平台2通过推进装置2-7移动到指定位置,并通过飞轮2-6调整至合适的姿态后,进行位置与姿态保持;位置移动与保持通过推进装置2-7实现,姿态调整及保持通过飞轮2-6实现。
步骤八、重复执行步骤五,在切断电机1-6动力的同时,上位机发出指令,使两个超导线圈2-2开始工作,通过飞轮2-6控制三自由度电磁模拟气浮平台2的姿态,使超导线圈2-2恒定指向模拟目标1-3;通过控制三自由度电磁模拟气浮平台2的姿态,进而控制超导线圈2-2的姿态。
步骤九、通过推进装置2-7辅助三自由度电磁模拟气浮平台2保持正确的规划路径,控制两个超导线圈2-2的电流变化直至消旋结束,并测量有电磁作用下的模拟目标1-3转速衰减曲线;
步骤十、得到数据后,还原空间目标模拟装置1及三自由度电磁模拟气浮平台2,实验结束。所得到的数据主要包括线圈电流变化数据、模拟目标角速度变化以及视觉传感器和惯性传感器的数据。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种基于双星电磁编队卫星的空间翻滚目标非接触消旋方法
- 一种用于空间非合作目标消旋及捕获的地面模拟实验系统