一种具有力感知功能柔性活检针机器人及其肺部导航方法
文献发布时间:2024-01-17 01:28:27
技术领域
本发明涉及肺部疾病诊疗领域,具体涉及一种具有力感知功能柔性活检针机器人及其肺部导航方法。
背景技术
目前,肺部疾病已经成为世界上最严重的健康问题之一,肺癌成为主要的死亡疾病之一。早期准确诊断可以防止肺部疾病的进一步恶化,提高疾病治愈率。然而,由于肺部固有的复杂结构,肺部疾病诊断是一个世界难题。
目前主要有两种检查肺周围结节的方法:经皮活检和经支气管镜活检。经皮活检是将针从体外穿入肺胸膜,采集组织标本进行组织病理学分析,但小的恶性结节难以诊断,诊断准确率不高。此外,经皮活检存在术中并发症的风险,包括气胸或肺萎陷。相比之下,经支气管镜活检通过灵活的支气管镜将活检工具送到病变区域,由外科医生通过口腔操作支气管镜进入肺部,并利用解剖学知识和相机导航到病变区域,使用活检针等工具进行组织取样,经支气管镜活检的风险更小。
为了扩大经支气管镜活检的能力,出现了一批可控的活检机器人。然而,大多数机器人的运动方法仍不够灵活,并缺乏力感知能力。
发明内容
针对现有的活检针机器人不够灵活、缺乏力感知能力的不足,本发明提供一种具有力感知功能、全向可控的柔性活检针机器人及其肺部导航方法,通过柔性针杆传递的推力间接测量活检穿刺力,提高肺部活检操作的安全性以及可靠性。
本发明采用如下技术方案:
一种具有力感知功能柔性活检针机器人,具有轴向进给与全向偏转的运动能力,所述的机器人包括可动支架、驱动系统和柔性活检针导管;
所述的驱动系统通过电动滑台安装在可动支架上,柔性活检针导管安装在驱动系统上,所述的可动支架用于粗调节柔性活检针导管的位姿,电动滑台用于粗调节柔性活检针导管的轴向进给运动,所述的驱动系统包括偏转驱动机构和进给机构,分别用于精调节柔性活检针导管的全向偏转运动和轴向进给运动。
进一步地,所述的驱动系统外部设有保护壳。
进一步地,所述的偏转驱动机构包括导线座、电机安装架、直线电机、电机安装块、肌腱固定块、电机法兰和套筒;
所述的电机安装架位于驱动系统外部的保护壳内,其主体结构呈中空柱状,导线座同轴安装并固定在电机安装架内;所述的电机安装块位于导线座的末端,四个直线电机通过电机安装块均布在导线座外围,直线电机的电机轴平行于导线座中轴线;所述的肌腱固定块通过电机法兰固定在每一个直线电机的电机轴端部,用于连接从柔性活检针导管引出的四根肌腱;所述的套筒安装在导线座的尾部,套筒内设有滑槽。
进一步地,所述的导线座由头部的导线块和尾部的同轴中空芯轴构成;所述的导线块包括连接盘、扇形板、导管连接器和线槽;所述的导管连接器安装在连接盘前侧的中心,用于固定柔性活检针导管;四对扇形板均布在导管连接器的外围,每一对扇形板之间形成线槽,从柔性活检针导管引出的四根肌腱一端经过线槽后分别连接四个肌腱固定块;所述的中空芯轴同轴安装在连接盘后侧的中心,从柔性活检针导管引出的柔性针杆依次贯穿导线块、中空芯轴、套筒后与进给机构连接。
进一步地,所述的进给机构包括舵机安装座、力传感器、压线块、传感器法兰、舵机、滑轮和推杆;
一对舵机相向安装在舵机安装座的后侧,两个舵机轴上均安装有带滚轮的滑轮,一对滑轮的两个滚轮上下错位安装,且两个滚轮间夹有推杆,通过一对舵机的正转和反转控制推杆轴向前进和后退;
舵机安装座上设有中孔,推杆的前端通过传感器法兰安装有力传感器和压线块,所述的力传感器安装在两个传感器法兰之间,压线块安装在前端的传感器法兰上;所述的压线块穿过舵机安装座上的中孔,位于舵机安装座的前侧,用于夹紧从柔性活检针导管引出的柔性针杆。
进一步地,位于前端的传感器法兰安装在偏转驱动机构的导线座尾部的套筒内,且位于前端的传感器法兰上设有与套筒内的滑槽相匹配的滑块。
进一步地,所述的推杆表面设有加大摩擦力的齿,推杆与一对滑轮的两个滚轮之间通过摩擦力传动。
进一步地,所述的柔性活检针导管包括活检针头、柔性针杆、铰链结构、弹性管和肌腱;所述的弹性管一端固定在偏转驱动机构的导线座上,弹性管另一端连接铰链结构;所述的柔性针杆贯穿弹性管和铰链结构,且柔性针杆的头部安装有活检针头,柔性针杆的尾部连接进给机构;所述肌腱的一端固定在铰链结构前端,肌腱的另一端固定在偏转驱动机构的肌腱固定块上。
进一步地,所述的肌腱数量为4。
上述的一种具有力感知功能柔性活检针机器人的肺部导航方法,包括如下步骤:
1)准备阶段
通过可动支架粗调节柔性活检针导管的位姿,使得柔性活检针导管位于合适的手术体位;将柔性活检针导管插入支气管镜的工作通道,使其刚好伸出支气管镜的头部;调节偏转驱动机构中的直线电机,使得柔性活检针导管的铰链结构复位;检查直线电机与力传感器的运行情况,确保气管镜机器人系统的正常运行;
2)操作阶段
在内镜图像的导引下,通过电动滑台粗调节柔性活检针导管的轴向进给,通过直线电机精调节柔性活检针导管的全向偏转,通过进给机构精调节柔性活检针导管的轴向进给,使得柔性活检针导管的活检针头进入期望区域取样,力传感器实时监测穿刺力的变化。
本发明具备的有益效果是:本发明提供的具有力感知功能的柔性活检针机器人解决了现有技术无法实现的气管镜导管的缺少力觉感知所导致的灵活性差、安全性不足等问题,通过柔性针杆传递的推力间接测量活检穿刺力,提高肺部活检操作的安全性以及可靠性、全向可控;本发明具有结构紧凑、灵活性好等优点,可在胸外科疾病的诊断方面发挥巨大的作用。
附图说明
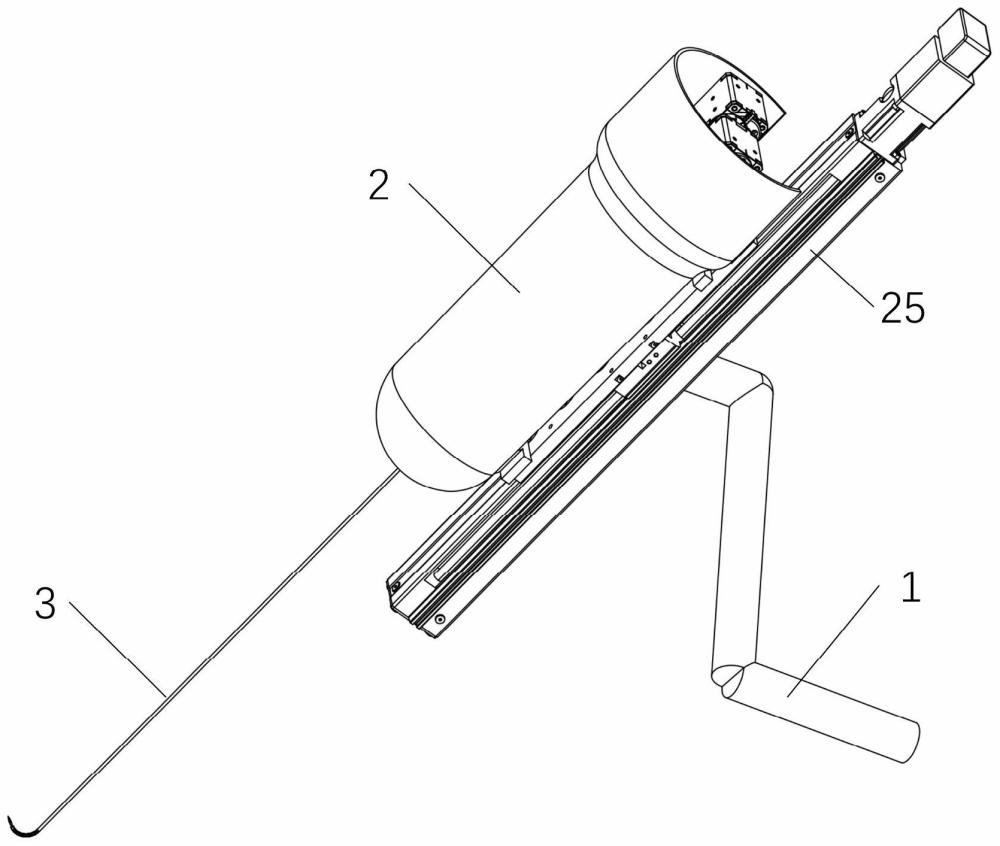
图1为一种具有力感知功能、全向可控的柔性活检针机器人示意图;
图2为驱动系统正视图与侧视图;
图3为导偏转驱动机构结构图;
图4为导偏转驱动机构的局部放大图;
图5为导线座零件结构图;
图6为电机安装块零件结构图;
图7为进给机构结构图;
图8为进给机构的部分结构图;
图9为滑轮与推杆之间的位置关系示意图;
图10为滑轮零件结构图;
图11为柔性活检针导管结构图;
图中:1.支架,2.驱动系统,3.柔性活检针导管,21.外壳,22.滑台安装板,23.偏转驱动机构,24.进给机构,25.电动滑台,231.导线座,2311连接盘,2312扇形板,2313导管连接器,2314线槽,2315.中空芯轴,232.电机安装架,233.直线电机,234.电机安装块,235.肌腱固定块,236.电机法兰,237.套筒,241.舵机安装座,242.力传感器,243.压线块,244.传感器法兰,245.舵机,246.滑轮,2461.滚轮,247.推杆,31.活检针头,32.柔性针杆,33.铰链机构,34.弹性管,35.肌腱。
具体实施方式
下面结合附图对本发明做进一步的说明。
如图1所示,一种具有力感知功能、全向可的柔性活检针机器人,具有轴向进给与全向偏转的运动能力,包括可动支架1、驱动系统2、柔性活检针导管3三部分。
所述的驱动系统2安装在可动支架1上,所述的可动支架1可以在大范围空间下调整柔性活检针导管的姿态,进而改变机器人的手术体位。
如图2所示,所述的驱动系统包括外壳21、滑台安装板22、偏转驱动机构23、进给机构24、电动滑台25;所述的电动滑台25安装在支架1上,偏转驱动机构23以及进给机构24通过螺栓固接到滑台安装板22上,且位于外壳内,所述外壳起保护作用;所述滑台安装板22安装在电动滑台25上,能够在电动滑台25上沿导轨滑动。
如图3所示,所述的偏转驱动机构23包括导线座231、电机安装架232、直线电机233、电机安装块234、肌腱固定块235、电机法兰236、套筒237;所述的电机安装架位于驱动系统2外部的保护壳内,其主体结构呈中空柱状,导线座231同轴安装并固定在电机安装架内;所述的电机安装块234位于导线座231的末端,四个直线电机233通过电机安装块234均布在导线座231外围,直线电机233的电机轴平行于导线座231中轴线;如图4所示,所述的肌腱固定块235通过电机法兰236固定在每一个直线电机233的电机轴端部,用于连接从柔性活检针导管引出的四根肌腱;所述的套筒安装在导线座231的尾部,套筒内设有滑槽。
所述的导线座如图5所示,由头部的导线块和尾部的同轴中空芯轴2315构成;所述的导线块包括连接盘2311、扇形板2312、导管连接器2313和线槽2314;所述的导管连接器安装在连接盘前侧的中心,用于固定柔性活检针导管;四对扇形板均布在导管连接器的外围,每一对扇形板之间形成线槽,从柔性活检针导管引出的四根肌腱一端经过线槽后分别连接四个肌腱固定块235;所述的中空芯轴同轴安装在连接盘后侧的中心,从柔性活检针导管引出的柔性针杆依次贯穿导线块、中空芯轴、套筒后与进给机构24连接。
所述的电机安装块如图7所示,电机安装块的中孔套设在导线座的中空芯轴尾部,沿中孔外布置有四个直线电机安装孔,用于固定四个直线电机。本实施例中,电机安装块与导线座的中空芯轴螺栓固定,在电机安装块和中空芯轴上均设有螺纹孔。
如图7所示,所述进给机构24包括舵机安装座241、力传感器242、压线块243、传感器法兰244、舵机245、滑轮246、推杆247;一对舵机245相向安装在舵机安装座241的后侧;如图8所示,两个舵机轴上均安装有带滚轮的滑轮246,一对滑轮的两个滚轮上下错位安装,且两个滚轮间夹有推杆247,通过一对舵机245的正转和反转控制推杆247轴向前进和后退。
如图9所示,以其中一个舵机为例,在舵机轴上安装滑轮246,使得滑轮246的滚轮2461位于推杆247下方且与推杆247摩擦接触;同理,另一个舵机上的滑轮的滚轮位于推杆上方且与推杆摩擦接触,这样,一对滑轮的两个滚轮上下错位安装,推杆夹在两个滚轮之间,通过控制舵机正反转,由摩擦力带动推杆前进和后退。本实施例中,所述的推杆247表面设有加大摩擦力的齿。
此外,舵机安装座241上设有中孔,推杆247的前端通过传感器法兰244安装有力传感器242和压线块243,所述的力传感器242安装在两个传感器法兰244之间,压线块243安装在前端的传感器法兰244上;所述的压线块243穿过舵机安装座241上的中孔,位于舵机安装座241的前侧,用于夹紧从柔性活检针导管引出的柔性针杆。
本实施例中,位于前端的传感器法兰244安装在偏转驱动机构23的导线座231尾部的套筒237内,且位于前端的传感器法兰244上设有与套筒237内的滑槽相匹配的滑块。
所述的滑轮如图10所示,滑轮右侧用于连接舵机轴,其上设有螺纹孔;滑轮左侧带有滚轮,所述滚轮为柱形凸台,在舵机的驱动下能够顺时针和逆时针转动。
如图11所示,所述柔性活检针导管3包括活检针头31、柔性针杆32、铰链结构33、弹性管34、四根肌腱35;所述活检针头31通过柔性针杆32安装在铰链结构33的一端,铰链结构33的另一端连接弹性管34的一端;所述弹性管34的另一端固定在导线座231中心的弹性管安装孔中;所述柔性针杆32依次穿过铰链结构33、弹性管34、导线座231以及套筒237,通过压线块243的夹持连接到进给机构24上。所述肌腱的一端固定在铰链结构33前端,肌腱的另一端固定在偏转驱动机构23的肌腱固定块235上。
本实施例中,所述的可动支架1可以在人类辅助下在较大范围空间下调整驱动系统2及柔性活检针导管3的姿态,进而改变机器人的手术体位。
所述的电动滑台25用于实现驱动系统2,柔性活检针导管3的进给运动;所述的偏转驱动机构23用于实现铰链结构33的全向偏转运动;所述的进给机构24用于实现柔性针杆32的进给运动。
所述弹性管34由聚醚醚酮材料组成,具有较高的刚度;所述铰链结构33由多个铰接的关节组成,具有较低的刚度;所述柔性活检针导管3在肌腱驱动下,铰链结构33主动偏转,弹性管34被动柔顺。
上述偏转驱动机构23精调节柔性活检针导管的全向偏转运动的过程为:由于四根肌腱的一端固定在铰链结构33前端,另一端固定在偏转驱动机构23的肌腱固定块235上,自然状态下四根肌腱松弛,当需要调节柔性活检针导管偏转时,控制四个直线电机运动,通过拉紧/松弛四个肌腱,使得肌腱在驱动下进行主动偏转。
上述进给机构24精调节柔性活检针导管的轴向进给运动的过程为:由于柔性针杆32夹持在进给机构24的压线块243上,当需要调节柔性活检针轴向进给时,控制位于推杆上方的滑轮顺时针转动,控制位于推杆下方的滑轮逆时针转动,则推杆在两个滑轮的滚轮摩擦力下轴向进给;当需要轴向退出时,则按照相反的方向控制两个滑轮。
实施例1
通过该活检针机器人实现肺部病灶组织的活检取样,实时测量穿刺力的大小,具体如下:
基于CT图像确定病人病灶组织的位置,操纵商业气管镜系统经口腔深入到肺部支气管内;当柔性活检针导管达到病灶附近区域,将柔性活检针导管3插入到支气管镜的工作通道中,并伸出气管镜头部;基于远程操作的方法控制活检针导管达到适当的位置,为后续活检操作做准备;推动柔性针杆轴向进给,将活检针头刺入到病灶组织,反复抽插几次,确保获得较多的病灶细胞;在穿刺过程中,实时观测力传感器监测到的穿刺力变化情况,确保活检的安全稳定;活检完成后,将活检针导管逐渐从气管镜的工作通道中撤出,并将采样的细胞组织进行病理分析;
实施例2
连接不同的遥控设备,实现人在回路的半自动化活检操作,具体如下:
将遥控设备如多自由度遥操作器或者遥控手柄接入到活检针机器人系统,并将其驱动控制代码整合到机器人软件系统中;将遥控设备的操作空间与活检针导管的运动空间建立映射关系,基于活检针导管的运动学模型将遥控设备的操作位姿转换为机器人的驱动信息。在气管镜活检教具上,让医生使用遥控设备控制活检针机器人进行模拟穿刺的练习,直至实现较为丝滑的机器人控制。
本技术领域的人员根据本发明所提供的文字描述、附图以及权利要求书能够很容易在不脱离权利要求书所限定的本发明的思想和范围条件下,可以做出多种变化和改动。凡是依据本发明的技术思想和实质对上述实施例进行的任何修改、等同变化,均属于本发明的权利要求所限定的保护范围之内。
- 一种具有力感知功能的水果采摘机器人及操作方法
- 一种具有力感知功能的水果采摘机器人及操作方法