爬行式焊接增材机器人
文献发布时间:2024-04-18 19:44:28
技术领域
本发明属于增材焊接领域,尤其涉及一种爬行式焊接增材机器人。
背景技术
目前国内外的焊接机器人可以归为两大类,一是采用直角坐标复合机构携带焊枪实现三至四自由度的焊接作业;二是采用多自由度机械臂携带焊枪实现三至四自由度的焊接作业。但现有焊接机器人组件部分结构固定,无法进行结构变换,不能满足狭小空间或复杂环境中的焊接需求。在对管道、特种车辆构件内部、箱体内部、轮船内部等内部空间狭小处进行焊接作业时,无法实现机器人焊接,需要人工作业。并且很多焊缝需要多种姿势焊接,例如平-侧-仰,焊接难度大。当管道、特种车辆构件、箱体、轮船等狭小内部空间出现损坏,必须进行修复。机器人进入狭窄空间运动位置受限,内部可达性差,必须要人工进入狭窄空间进行修复,操作非常困难。
当管道、特种车辆构件、箱体、轮船等内部空间出现损坏,需要修复时,必须要人工进入狭窄空间进行修复。由于狭小箱体内空间仄蔽,人员持焊枪也难以达到修复区域。并且修复的位置不同,需要人员进行仰焊、侧焊、立焊等高难度操作,人员操作环境非常恶劣,难以保证焊接工作高效进行。同时,增材修复时在狭小空间中弥漫大量粉尘,容易造成操作人员呼吸困难,危险性大。
发明内容
本发明目的在于提供一种爬行式焊接增材机器人,以解决狭小空间内人员操作难、可达性差、危险性大的技术问题。
为实现上述目的,本发明的爬行式焊接增材机器人的具体技术方案如下:
一种爬行式焊接增材机器人,其特征在于,包括丝盘、焊枪基座3、移动支撑腿4、主体箱5、能源装置7、支撑板8、万向轮9和驱动装置10;
所述机器人以四条移动支撑腿4运动,每条支撑腿由伸缩拉杆11和关节舵机12控制运动;所述移动支撑腿4安装在支撑板8四周;所述支撑板8上安装机器人主体箱5,所述机器人主体箱5内部设置空腔;所述机器人主体箱5内部空腔中设置能源装置7;所述支撑板8下方安装驱动装置10;所述机器人主体箱5上方设置有万向轮9;所述焊枪基座3安装在万向轮上,可通过万向轮进行旋转;所述丝盘安装在焊枪基座3上部,为焊枪供应丝材。
其中,所述能源装置7为电池。
其中,所述能源装置7为油箱和发电机组成的供电装置。
进一步地,所述机器人增材的能量方式包括氩弧、二氧化碳弧、PMIG、等离子弧、激光和电子束。
其中,所述焊枪基座3前端设置有焊丝及送丝机构6。
其中,所述机器人的背部装载激光器及水冷机。
进一步地,机器人的前端装载伸出操作机构,用于固定送丝机构和焊枪。
进一步地,机器人前端固定设置激光头和送丝装置。
进一步地,所述机器人上布置各个方向的摄像头。
进一步地,所述机器人的尺寸为10mm*10mm*10mm~30m*30m*30m之间的任意尺寸。
本发明的爬行式焊接增材机器人具有以下优点:可以替代操作人员进入管道、特种车辆构件、箱体、轮船等内部狭小空间进行增材焊接,解决狭小空间内人员操作难、可达性差、危险性大等风险,提高焊接、增材修复的效率和质量。
附图说明
图1为本发明的爬行式焊接增材机器人结构示意图;
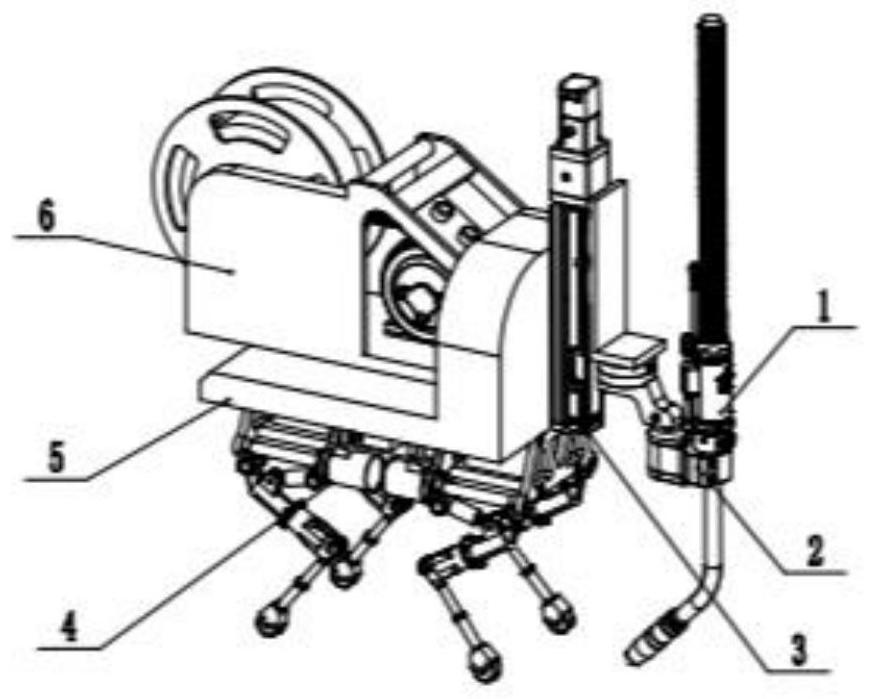
图2为本发明的爬行式焊接增材机器人轴测图;
图3为本发明的爬行式焊接增材机器人平面示意图;
图中标记说明:1.焊枪线缆,2.焊枪,3.焊枪基座,4.移动支撑腿,5.主体箱,6.焊丝及送丝机构,7.能源装置,8.支撑板,9.万向轮,10.驱动装置,11.伸缩拉杆,12.关节舵机。
具体实施方式
为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明一种爬行式焊接增材机器人做进一步详细的描述。
如图1-图3所示,本发明的爬行式焊接增材机器人,包括丝盘、焊枪2、焊枪基座3、移动支撑腿4、主体箱5、焊丝及送丝机构6、能源装置7、支撑板8、万向轮9、驱动装置10。
移动支撑腿4,机器人以四条移动支撑腿4运动,每条支撑腿由伸缩拉杆11和关节舵机12控制运动。
支撑板8,所述移动支撑腿4安装在支撑板8四周。
机器人主体箱5,所述支撑板8上安装机器人主体箱5,所述机器人主体箱5内部设置空腔。
能源装置7,所述机器人主体箱5内部空腔中设置能源装置7。
驱动装置10,所述支撑板8下方安装驱动装置10。
万向轮9,所述万向轮9设置在机器人主体箱5上部。
焊枪基座3,所述焊枪基座3安装在万向轮上,可通过万向轮进行旋转。
丝盘,所述丝盘安装在焊枪基座3上部,为焊枪供应丝材。
焊丝及送丝机构6,所述焊丝及送丝机构6设置在焊枪基座3前端。
机器人的供电方式可以自主选择,一种是内部供电,即电池供电或者发电机供电。机器人主体箱5内部空腔可装备电池,电池包括锂电池、酸电池或者铅电池。也可装备为油箱,携带发电机进行燃油供电。另一种为外部供电,即使用电线电缆连接机器人供电。
增材的能量方式包括氩弧、二氧化碳弧、PMIG、等离子弧、激光、电子束等。
使用氩弧、二氧化碳弧、MIG、等离子弧作为热源时,机器人背部装载焊机电源及送丝机,使用激光为热源时机器人的背部装载激光器及水冷机,当激光器为风冷型时则只装载激光器及相应光纤。
机器人的前端装载伸出操作机构,用于固定送丝机构和焊枪。当使用激光作为热源时,机器人前端用于固定激光头和送丝装置。
焊枪可选择包括MIG、TIG、CMT、单丝及双丝等离子等多种焊枪。
增材及焊接装置可以送丝或者送粉。可以焊接或的丝材直径为0.1mm-5mm。送丝速率为0-30m/min。送粉的直径包括5-1000μm。送粉效率为0-10kg/h。
送材料的方式包括同轴送丝、同轴送粉、旁轴送丝、旁轴送粉。
焊机的驱动电源设为5V-380V,可以增材的材料包括金属及非金属,包括纯铁、铁基合金、纯铝、铝合金、铜基合金、纯镁、镁合金、钴基合金、镍基合金、钨基合金等多种金属材料,非金属材料包括尼龙、树脂、陶瓷等。
爬行焊接增材机器人以移动支撑腿4进行运动,可以是金属也可以是非金属。
针对不同的应用环境,机器人设计及制造时尺寸变化,从10mm*10mm*10mm,可以扩展到30m*30m*30m之间的任意尺寸。
机器人上布置各个方向的摄像头,用于对空间上多角度的形貌进行实时观察。
其工作原理为:驱动装置可以驱动伸缩拉杆11与关节舵机12,使机器人移动支撑腿4可以前后摆动和弯曲。行进时,机器人关节舵机12运作,先将一条前支撑腿弯曲离地,伸缩拉杆11运动使支撑腿向前摆动至前方,关节舵机12随之运作使支撑腿伸直触地。随后将另一侧的后支撑腿弯曲离地,向前摆动至前方后伸直触地,之后依次将另外两条支撑腿移动至前方,完成行进动作。完成跳跃动作时,四条支撑腿的关节舵机12同时运作使四条支撑腿弯曲,随后前支撑腿关节舵机12率先运作,使机器人前支撑腿悬空,此时后支撑腿关节舵机12运作,将后支撑腿迅速伸直,此时由于惯性机器人可以向前跃起,在落地时四条支撑腿的关节舵机12相互协作使支撑腿弯曲,以缓冲机器人落地时对支撑腿的冲击力,防止损坏支撑腿。针对复杂崎岖不平场景,爬行机器人具备翻较大跃障碍及蹬梯等能力。行进至增材位置后按照增材模型进行增材作业,如在交叉面作业,可将部分支撑腿收起,以避免与工件的干涉。行进至增材位置后按照增材模型进行增材作业,通过旋转万向轮移动增材焊枪基座3,将焊枪送至增材起始坐标位置。增材开始后,焊丝经焊丝及送丝机构6和焊枪线缆1送至焊枪头,实现同步送丝。
虽然结合了附图描述了本发明的实施方式,但是对于本领域技术人员来说,在不脱离本发明原理的前提下,还可以做出若干变形和改进,这些也应视为属于本发明的保护范围。
- 一种履带式焊接增材机器人
- 一种履带式焊接增材机器人