直线往复式多RGV死锁避免和冲突实时控制方法、系统、介质、终端
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及自动化控制的技术领域,特别是涉及一种直线往复式多轨道式自动导引车(Rail Guided Vehicle,RGV)死锁避免和冲突实时控制方法、系统、介质、终端。
背景技术
当前,发达国家将智能制造作为提升制造业整体竞争力的核心技术。美国智能制造领导联盟提出实施21世纪“智能过程制造”的技术框架和路线,德国提出了以智能制造为主导的第四次工业革命发展战略,英国宣布“英国工业2050战略”,日本和韩国也分别提出“I-Japan战略”和“制造业创新3.0战略”。面对第四次工业革命带来的全球产业竞争格局,抢占未来产业竞争制高点,中国宣布实施“中国制造2025”。智能制造的关键是实现制造流程智能化。厂内物流作为制造流程中承上启下重要环节,实现物流智能化和无人化可以提高运转效率、降低生产和运输成本、降低安全事故发生率,成为众多行业推进智能制造的重要方向。
RGV又称为有轨穿梭小车,是一种实现厂内物流智能化和无人化的运输设备,可在固定轨道上自动运行并自动完成取货、卸货任务。按照轨道布局形式,可分为直线往复式、分段式和环形三种。直线往复式空间占用最小,搬运效率介于分段式和环形式之间。因此,在大多数无人车间和无人仓库,直线往复式往往成为空间限制和效率要求下的折中选择。
在直线往复式轨道中,每辆RGV可沿轨道双向往复行驶,并能停靠中间任意地点。因此多RGV调度过程中会面临大量路径重叠而引发的避碰问题,以及相邻两车相互等待而引发的死锁问题。
例如,申请公布号为CN110727275A的中国发明专利《基于PLC的RGV动态避碰控制系统及方法》公开了一种在PLC层实时计算具有相邻关系的RGV相向或同向时,减速和停车制动的控制方法,以避免相邻两车碰撞。虽然该方法可以避免两车路径冲突时的相撞问题,但无法解决当相邻两RGV相向运行时,在减速和停车制动后可能引起两车相互等待而无法运行的死锁问题。
再例如,申请公布号为CN102663574A的中国发明专利《基于遗传算法的多RGV动态调度方法》提出一种针对环形轨道上单向运行多个RGV的调度方法,运用遗传算法建立模型并求解,得到多个RGV的运送任务优化方案,可减少RGV的堵塞和空跑,提高运送效率。但是,该方法有效性限于所提出的环形轨道上RGV单向运行场景,不适用于直线往复式轨道上RGV双向运行场景,且实时性不高。
再例如,申请公布号为CN110837950A的中国发明专利《一种RGV的动态调度方法》公开了一种RGV的动态调度方法,通过公平竞争原则对运输请求进行排序,针对整体效益最佳建立RGV动态调度模型,采用遗传算法对模型进行求解,经过仿真得出RGV的动态调度策略。然而,该方法也不适于解决直线往复式轨道上多RGV的死锁和冲突问题,实时性也不高。
发明内容
鉴于以上所述现有技术的缺点,本发明的目的在于提供一种直线往复式多RGV死锁避免和冲突实时控制方法、系统、介质、终端,通过进行RGV的潜在死锁和冲突的检测控制,有效避免了直线往复式轨道上多RGV的死锁和冲突问题,最大限度了保证了RGV的运行效率。
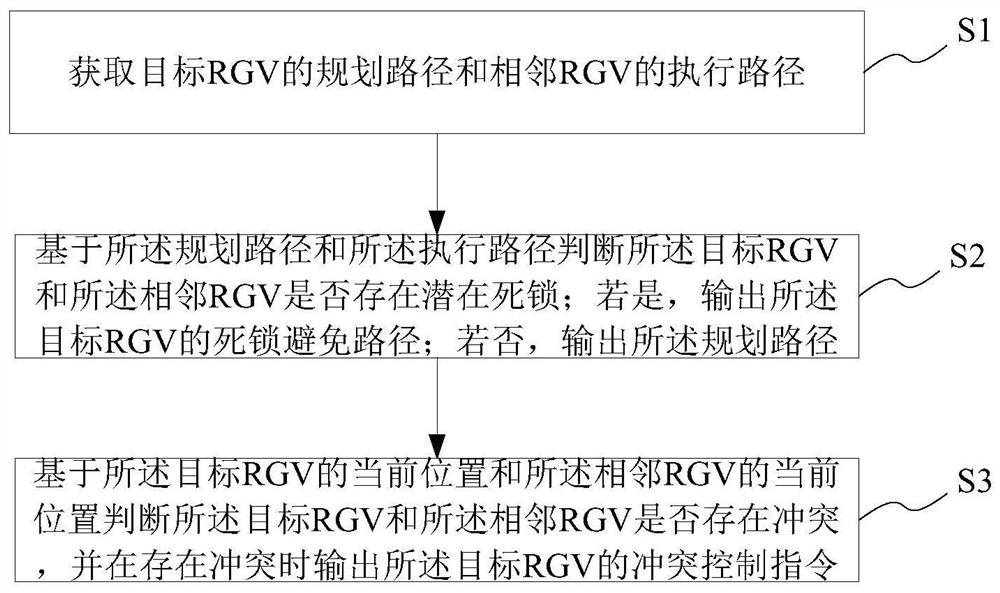
为实现上述目的及其他相关目的,本发明提供一种直线往复式多RGV死锁避免和冲突实时控制方法,包括以下步骤:获取目标RGV的规划路径和相邻RGV的执行路径;基于所述规划路径和所述执行路径判断所述目标RGV和所述相邻RGV是否存在潜在死锁;若是,输出所述目标RGV的死锁避免路径;若否,输出所述规划路径;基于所述目标RGV的当前位置和所述相邻RGV的当前位置判断所述目标RGV和所述相邻RGV是否存在冲突,并在存在冲突时输出所述目标RGV的冲突控制指令。
于本发明一实施例中,在以下任一情况下判断所述目标RGV和所述相邻RGV存在潜在死锁:
1)所述规划路径和所述执行路径相向而行,没有重合点,且所述规划路径的终点和所述执行路径的终点之间的距离小于安全距离;
2)所述规划路径和所述执行路径相向而行,且有重合点。
于本发明一实施例中,所述死锁避免路径为所述目标RGV的起点至等待位置之间的路径,所述等待位置Location_Wait=Location_Next+Direction_existing×Distance_safety,其中Location_Next表示所述执行路径的终点,Distance_safety表示安全距离,Direction_existing取1表示与基准方向同向,取-1表示与基准方向反向。
于本发明一实施例中,当abs(Location_Now-Location_Now_neighbour) 于本发明一实施例中,在存在冲突时输出所述目标RGV的冲突控制指令包括以下步骤: 当abs(Location_Now-Location_Now_neighbour) 否则,输出所述目标RGV减速制动指令。 对应地,本发明提供一种直线往复式多RGV死锁避免和冲突实时控制系统,包括获取模块、死锁处理模块和冲突处理模块; 所述获取模块用于获取目标RGV的规划路径和相邻RGV的执行路径; 所述死锁处理模块用于基于所述规划路径和所述执行路径判断所述目标RGV和所述相邻RGV是否存在潜在死锁;若是,输出所述目标RGV的死锁避免路径;若否,输出所述规划路径; 所述冲突处理模块用于基于所述目标RGV的当前位置和所述相邻RGV的当前位置判断所述目标RGV和所述相邻RGV是否存在冲突,并在存在冲突时输出所述目标RGV的冲突控制指令。 本发明提供一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述的直线往复式多RGV死锁避免和冲突实时控制方法。 本发明提供一种直线往复式多RGV死锁避免和冲突实时控制终端,包括:处理器及存储器; 所述存储器用于存储计算机程序; 所述处理器用于执行所述存储器存储的计算机程序,以使所述直线往复式多RGV死锁避免和冲突实时控制终端执行上述的直线往复式多RGV死锁避免和冲突实时控制方法。 本发明提供一种直线往复式多RGV死锁避免和冲突实时控制系统,包括上述的直线往复式多RGV死锁避免和冲突实时控制终端和RGV; 所述RGV用于在所述直线往复式多RGV死锁避免和冲突实时控制终端的控制下进行直线往复式行驶。 本发明提供一种直线往复式多RGV死锁避免和冲突实时控制系统,包括工控机和RGV车载控制器; 所述工控机用于获取目标RGV的规划路径和相邻RGV的执行路径,基于所述规划路径和所述执行路径判断所述目标RGV和所述相邻RGV是否存在潜在死锁;若是,输出所述目标RGV的死锁避免路径;若否,输出所述规划路径; 所述RGV车载控制器设置在目标RGV上,用于基于所述目标RGV的当前位置和所述相邻RGV的当前位置判断所述目标RGV和所述相邻RGV是否存在冲突,并在存在冲突时输出所述目标RGV的冲突控制指令。 如上所述,本发明的直线往复式多RGV死锁避免和冲突实时控制方法、系统、介质、终端,具有以下有益效果: (1)通过进行RGV的潜在死锁的检测、控制,避免了死锁时两RGV相互等待的情况发生; (2)通过进行RGV的冲突的检测、控制,避免了两RGV相撞的情况发生; (3)具有极高实时性高,最大限度地保证了RGV的运行效率,实用性强。 附图说明 图1显示为本发明的直线往复式多RGV死锁避免和冲突实时控制方法于一实施例中的框架示意图; 图2显示为本发明的直线往复式多RGV死锁避免和冲突实时控制方法于一实施例中的流程图; 图3显示为本发明的直线往复式多RGV死锁避免和冲突实时控制方法于一实施例中的场景示意图; 图4显示为本发明的直线往复式多RGV死锁避免和冲突实时控制方法于另一实施例中的场景示意图; 图5显示为本发明的直线往复式多RGV死锁避免和冲突实时控制系统于一实施例中的结构示意图; 图6显示为本发明的直线往复式多RGV死锁避免和冲突实时控制终端于一实施例中的结构示意图; 图7显示为本发明的直线往复式多RGV死锁避免和冲突实时控制系统于另一实施例中的结构示意图; 图8显示为本发明的直线往复式多RGV死锁避免和冲突实时控制系统于又一实施例中的结构示意图。 元件标号说明 51 获取模块 52 死锁处理模块 53 冲突处理模块 61 处理器 62 存储器 71 直线往复式多RGV死锁避免和冲突实时控制终端 72 RGV 81 工控机 82 RGV车载控制器 具体实施方式 以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。 需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。 如图1所示,本发明的直线往复式多RGV死锁避免和冲突实时控制方法向上连接作业调度层。其中,作业调度层提供RGV运输作业的路径规划,作为本发明的直线往复式多RGV死锁避免和冲突实时控制方法的输入。本发明的直线往复式多RGV死锁避免和冲突实时控制方法、系统、介质、终端通过工控机和RGV车载控制器(如RGV车载PLC)分别进行RGV的潜在死锁和冲突的检测控制,从而有效避免了直线往复式轨道上多RGV的死锁和冲突问题,最大限度了保证了RGV的运行效率。其中,死锁是指两个或两个以上的进程由于竞争资源或者由于彼此通信而造成的一种阻塞的现象,若无外力作用,它们都将无法推进下去。此时称系统处于死锁状态或系统产生了死锁,这些永远在互相等待的进程称为死锁进程。潜在死锁是指两个或两个以上的进程未出现死锁,但随着系统的继续运行,有可能出现死锁的状态。 需要说明的是,本发明的直线往复式多RGV死锁避免和冲突实时控制方法可以基于工控机和RGVRGV车载控制器协同合同来实现,也可以基于单一终端来实现。 如图2所示,于一实施例中,本发明的直线往复式多RGV死锁避免和冲突实时控制方法包括以下步骤: 步骤S1、获取目标RGV的规划路径和相邻RGV的执行路径。 本发明的直线往复式多RGV死锁避免和冲突实时控制终端基于所述目标RGV的请求,进行直线往复式多RGV死锁避免和冲突实时控制。具体地,基于作业调度层获取目标RGV的规划路径Path=(Location_Start,Location_End)和相邻RGV的执行路径Path_existing=(Location_Now,Location_Next)。其中,Location_Start、Location_End分别表示目标RGV起点和终点;Location_Now表示相邻RGV的当前位置,Location_Next表示相邻RGV的终点。 步骤S2、基于所述规划路径和所述执行路径判断所述目标RGV和所述相邻RGV是否存在潜在死锁;若是,输出所述目标RGV的死锁避免路径;若否,输出所述规划路径。 于本发明一实施例中,在以下任一情况下判断所述目标RGV和所述相邻RGV存在潜在死锁: 1)所述规划路径和所述执行路径相向而行,没有重合点,且所述规划路径的终点和所述执行路径的终点之间的距离小于安全距离;其中,所述安全距离是指两RGV安全行驶所需的最小距离。 2)所述规划路径和所述执行路径相向而行,且有重合点。 除了以上两种情况,所述目标RGV和所述相邻RGV均不存在潜在死锁。 当存在潜在死锁情况时,为了避免所述目标RGV和所述相邻RGV死锁时互相等待的情况,需要为所述目标RGV重新规划路径,即提供死锁避免路径。在所述死锁避免路径下,所述目标RGV和所述相邻RGV不会发生死锁。于本发明一实施例中,所述死锁避免路径为所述目标RGV的起点至等待位置之间的路径,所述等待位置Location_Wait=Location_Next+Direction_existing×Distance_safety,其中Location_Next表示所述执行路径的终点,Distance_safety表示安全距离,Direction_existing取1表示与基准方向同向,取-1表示与基准方向反向。其中,所述基准方向为预先设置的,可以为直线往复中的任一方向。优选地,所述死锁避免路径表示为Path_new=(Location_Start,Location_Wait,Location_End),其中Location_End用于保存所述目标RGV的规划路径的终点。 当不存在潜在死锁时,所述目标RGV按照所述规划路径进行行驶。 步骤S3、基于所述目标RGV的当前位置和所述相邻RGV的当前位置判断所述目标RGV和所述相邻RGV是否存在冲突,并在存在冲突时输出所述目标RGV的冲突控制指令。 具体地,在所述目标RGV基于死锁避免路径或规划路径进行行进时,需要判断所述目标RGV和相邻RGV之间是否存在冲突,并在存在冲突时及时进行停车或减速控制。 具体地,当abs(Location_Now-Location_Now_neighbour) 于本发明一实施例中,在存在冲突时输出所述目标RGV的冲突控制指令包括以下步骤: 31)当abs(Location_Now-Location_Now_neighbour) 32)否则,输出所述目标RGV减速制动指令。 当所述冲突消除后,继续控制所述目标RGV行驶,并实时进行冲突检测。 下面通过具体实施例来进一步阐述本发明的直线往复式多RGV死锁避免和冲突实时控制方法。 实施例一 如图3所示为地面工控机进行潜在死锁检测和死锁避免的过程。由图可知,作业调度层给出作为目标RGV的RGV_control的路径为:Path=(Location_Start,Location_End),其中Location_Start、Location_End分别为起点和终点。与RGV_control相邻的RGV_neighbour作为相邻RGV,其执行路径为Path_existing=(Location_Now,Location_Next),且RGV_control的前进方向为负,RGV_neighbour的前进方向为正,安全距离长度为Distance_safety。可以看出RGV_control和RGV_neighbour相向而行,Path和Path_existing的路径没有交叉点,但其终点Location_End和Location_Next的间隔小于安全距离Distance_safety,因此二者之间存在潜在死锁。由于RGV_neighbour的前进方向为正,因此Direction_existing=1,从而Location_Wait=Location_Next+Distance_safety,即图3中所示位置。 实施例二 如图4所示为RGV车载PLC的冲突检测和冲突控制的过程。由图可知,RGV_control的当前位置为Location_Start,其相邻的RGV_neighbour的当前位置为Location_Now,安全距离长度为Distance_safety。RGV_control的当前速度为v,最大加速度数值为a,其制动距离Distance_braking=v2/(2×a)。从图中可见abs(Location_Start-Location) 如图5所示,于一实施例中,本发明的直线往复式多RGV死锁避免和冲突实时控制系统包括获取模块51、死锁处理模块52和冲突处理模块53。 所述获取模块51用于获取目标RGV的规划路径和相邻RGV的执行路径。 所述死锁处理模块52与所述获取模块51相连,用于基于所述规划路径和所述执行路径判断所述目标RGV和所述相邻RGV是否存在潜在死锁;若是,输出所述目标RGV的死锁避免路径;若否,执行所述规划路径。 所述冲突处理模块53与所述死锁处理模块52相连,用于基于所述目标RGV的当前位置和所述相邻RGV的当前位置判断所述目标RGV和所述相邻RGV是否存在冲突,并在存在冲突时输出所述目标RGV的冲突控制指令。 其中,获取模块51、死锁处理模块52和冲突处理模块53的结构和原理与上述直线往复式多RGV死锁避免和冲突实时控制方法中的步骤一一对应,故在此不再赘述。 需要说明的是,应理解以上装置的各个模块的划分仅仅是一种逻辑功能的划分,实际实现时可以全部或部分集成到一个物理实体上,也可以物理上分开。且这些模块可以全部以软件通过处理元件调用的形式实现;也可以全部以硬件的形式实现;还可以部分模块通过处理元件调用软件的形式实现,部分模块通过硬件的形式实现。例如,x模块可以为单独设立的处理元件,也可以集成在上述装置的某一个芯片中实现,此外,也可以以程序代码的形式存储于上述装置的存储器中,由上述装置的某一个处理元件调用并执行以上x模块的功能。其它模块的实现与之类似。此外这些模块全部或部分可以集成在一起,也可以独立实现。这里所述的处理元件可以是一种集成电路,具有信号的处理能力。在实现过程中,上述方法的各步骤或以上各个模块可以通过处理器元件中的硬件的集成逻辑电路或者软件形式的指令完成。 例如,以上这些模块可以是被配置成实施以上方法的一个或多个集成电路,例如:一个或多个特定集成电路(Application Specific Integrated Circuit,简称ASIC),或,一个或多个微处理器(Digital Singnal Processor,简称DSP),或,一个或者多个现场可编程门阵列(Field Programmable Gate Array,简称FPGA)等。再如,当以上某个模块通过处理元件调度程序代码的形式实现时,该处理元件可以是通用处理器,例如中央处理器(Central Processing Unit,简称CPU)或其它可以调用程序代码的处理器。再如,这些模块可以集成在一起,以片上系统(system-on-a-chip,简称SOC)的形式实现。 本发明的存储介质上存储有计算机程序,该程序被处理器执行时实现上述的直线往复式多RGV死锁避免和冲突实时控制方法。优选地,所述存储介质包括:ROM、RAM、磁碟、U盘、存储卡或者光盘等各种可以存储程序代码的介质。 如图6所示,于一实施例中,本发明的直线往复式多RGV死锁避免和冲突实时控制终端包括:处理器61及存储器62。 所述存储器62用于存储计算机程序。 所述存储器62包括:ROM、RAM、磁碟、U盘、存储卡或者光盘等各种可以存储程序代码的介质。 所述处理器61与所述存储器62相连,用于执行所述存储器62存储的计算机程序,以使所述直线往复式多RGV死锁避免和冲突实时控制终端执行上述的直线往复式多RGV死锁避免和冲突实时控制方法。 优选地,所述处理器61可以是通用处理器,包括中央处理器(Central ProcessingUnit,简称CPU)、网络处理器(Network Processor,简称NP)等;还可以是数字信号处理器(Digital Signal Processor,简称DSP)、专用集成电路(Application SpecificIntegrated Circuit,简称ASIC)、现场可编程门阵列(Field Programmable Gate Array,简称FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。 如图7所示,于一实施例中,本发明的直线往复式多RGV死锁避免和冲突实时控制系统包括上述的直线往复式多RGV死锁避免和冲突实时控制终端71和RGV72。 所述RGV72通过无线方式与所述直线往复式多RGV死锁避免和冲突实时控制终端71相连,用于在所述直线往复式多RGV死锁避免和冲突实时控制终端71的控制下进行直线往复式行驶,以避免死锁时两RGV相互等待以及两RGV相撞的情况发生。 于本发明一实施例中,所述RGV72包括RGV车载控制器,所述RGV车载控制器与所述直线往复式多RGV死锁避免和冲突实时控制终端71相通信,从而实现实时控制。 如图8所示,于一实施例中,本发明的直线往复式多RGV死锁避免和冲突实时控制系统包括工控机81和RGV车载控制器82。 所述工控机81用于获取目标RGV的规划路径和相邻RGV的执行路径,基于所述规划路径和所述执行路径判断所述目标RGV和所述相邻RGV是否存在潜在死锁;若是,输出所述目标RGV的死锁避免路径;若否,输出所述规划路径。 所述RGV车载控制器82设置在目标RGV上,用于基于所述目标RGV的当前位置和所述相邻RGV的当前位置判断所述目标RGV和所述相邻RGV是否存在冲突,并在存在冲突时输出所述目标RGV的冲突控制指令。优选地,所述RGV车载控制器82采用RGV车载PLC。 通过所述工控机81和所述RGV车载控制器82的控制,所述目标RGV能够实现有效的死锁避免和冲突控制,保证了其有效行驶。 综上所述,本发明的直线往复式多RGV死锁避免和冲突实时控制方法、系统、介质、终端通过进行RGV的潜在死锁的检测、控制,避免了死锁时两RGV相互等待的情况发生;通过进行RGV的冲突的检测、控制,避免了两RGV相撞的情况发生;具有极高实时性高,最大限度地保证了RGV的运行效率,实用性强。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。 上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 直线往复式多RGV死锁避免和冲突实时控制方法、系统、介质、终端
- 直线感应电机效率优化控制方法、系统、介质、处理终端