一种大型望远镜主镜室的跨地形可爬升安装及运输系统
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及光学仪器技术领域,具体涉及一种大型望远镜主镜室的跨地形可爬升安装及运输系统。
背景技术
在空间探测、天文观测中,为了提升观测质量,提高分辨率,需要增大光学探测设备的口径,口径的增大,导致安装反射镜的主镜室重量巨大尺寸庞大,其安装、运输和定位成为难题。一般来说,主镜室的安装和测试平台和主镜室最后用于观测的观测平台,受制于观测需求和现场需要,通常不在一个平面上,存在地形差异。观测需要其观测平台可自由旋转,因此望远镜的基座周围需要设计出供其旋转的深坑。主镜室要安装到望远镜系统上,需跨越地形的差异,越过深坑,并顺利爬升至基座平面,然而受制于结构布局,一般无法采用吊车和起重机械,望远镜上端的次镜和四通都会对起吊过程产生干涉。由于上述种种因素,传统的利用起吊运输安装的方式不再适用于大口径望远镜的主镜室系统,迫切需要研发出一种可克服地形高度差异、可跨越深坑障碍、且可以自由升降的移动装置,用于实现主镜室的运输和定位安装,保证其和望远镜系统正常对接组装。
发明内容
本发明实施例所要解决的技术问题在于,提供一种大型望远镜主镜室的跨地形可爬升安装及运输系统。可实现主镜室的移动、提升、运输和定位安装的工作。
为了解决上述技术问题,本发明实施例提供了一种大型望远镜主镜室的跨地形可爬升安装及运输系统,包括运输框架组件(2)、轮组切换组件(3)、爬升和下降组件(7)、安装和测试平台(8)、望远镜基座(5),所述轮组切换组件(3)包括外圈轮组(3.1)和内圈轮组(3.2),所述运输框架组件(2)表面具有与内圈轮组承载配合的通道,所述通道与所述运输框架组件(2)表面的高度差与所述外圈轮组(3.1)和内圈轮组(3.2)的高度差相同,所述爬升和下降组件(7)用于使所述运输框架组件(2)从所述安装和测试平台(8)运行至所述望远镜基座(5)上。
其中,所述外圈轮组(3.1)和内圈轮组(3.2)均为两行设置。
其中,还包括主镜室安装组件(1),所述运输框架组件(2)上部圆周均布设置若干组主镜室升降组件(9),用于顶升所述主镜室安装组件(1)。
其中,所述主镜室安装组件(1)包含:主镜室(1.1)、楔形块(1.2)、固定螺钉(1.3)和固定块(1.4),所述主镜室(1.1)和所述运输框架组件(2)中心圆盘同心定位,通过所述楔形块(1.2)、固定螺钉(1.3)和固定块(1.4)实现和所述运输框架组件(2)固定。
其中,所述爬升和下降组件(7)包含所述通道(7.7)、通道横向型材(7.13)以及两组伺服电机(7.5)、重载丝杠(7.10)、丝杠螺母(7.9)、,所述通道横向型材(7.13)组成所述爬升和下降组件(7)的主体,所述通道(7.7)固定设置于所述通道横向型材(7.13)上,所述伺服电机(7-5)用于为所述重载丝杠(712)旋转提供动力,所述丝杠螺母(7-9)带动所述通道横向型材(7.13)升降。
实施本发明实施例,具有如下有益效果:保证主镜室运输和升降过程的安全,比如主镜室和运输框架组件中心圆盘同心定位,通过连接组件实现主镜室和运输框架组件固定,保证运输过程稳定可靠;当主镜室升降组件开始升降控制时,把连接组件和运输框架组件分离。当爬升和下降组件提供升降控制时设置了限位块限制运输框架组件水平方向的移动,防止在升降过程中出现危险。内外圈轮组相互配合,通过合理切换并设置一定的防护,也大大减小了运输和升降过程的危险性,可安全高效的实现跨地形爬升控制。本发明可以实现同类光学检测仪器多个自由度的平移、升降和倾斜控制,具有较高的应用价值和广泛的适用性。本发明结构可靠,功能性强大,适应性广泛,可以实现各种尺寸光学仪器和重要设备的运输和安装工作。
附图说明
图1是本发明的整体结构示意图 ;
图2是本发明的运输框架组件在爬升时的结构示意图;
图3是本发明的运输框架组件在望远镜基座进行作业的结构示意图;
图4是爬升和下降组件的正视的结构示意图;
图5是主镜室安装组件的结构示意图;
图6是运输框架组件和轮组切换组件的结构示意图;
图7是轮组切换组件的结构示意图;
图8是爬升和下降组件的正视的结构示意图之二;
图9是爬升和下降组件的俯视结构示意图;
图10是主镜室升降组件的结构示意图。
其中,图中各附图标记为:
主镜室安装组件;2、运输框架组件;3、轮组切换组件;4、望远镜顶部系统;5、望远镜基座;6、望远镜观测平台;7、爬升和下降组件;8、安装和测试平台;9、主镜室升降组件;1.1、主镜室;1.2、楔形块;1.3、固定螺钉;1.4、固定块;2.1、斜角方钢;2.2、中心圆盘;2.3、加强方钢;2.4、外框方钢;2.5、横向方钢;2.6、三角板;3.1、外圈轮组;3.2、内圈轮组;7.1、安装螺钉;7.2、斜齿轮;7.3、联轴器;7.4、传动轴;7.5、伺服电机;7.6、锁紧螺母;7.7、通道;7.8、通道方钢;7.9、丝杠螺母;7.10、重载丝杠;7.11、底板;7.12、通道纵向型材;7.13、通道横向型材;7.14、通道斜向型材;9.1、过渡板;9.2、顶升光轴;9.3、液压缸;9.4、顶升底板。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
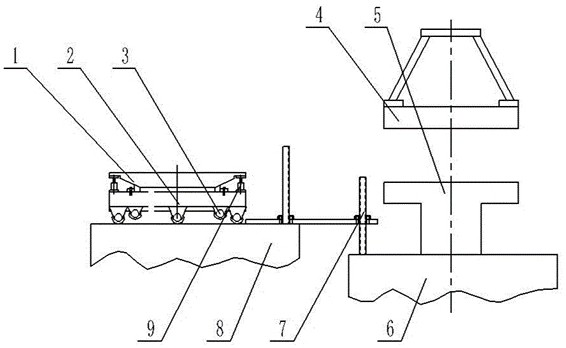
结合图1、图2和图3,本发明实施例提供的一种大型望远镜主镜室的跨地形可爬升安装及运输系统,用于实现大尺寸高重量高成本的主镜室的运输安装过程。从图中可以看出,主镜室的安装和测试平台8是用于安装主镜室组件的,相对空间较高,位于图中左侧;用于观测的观测平台6则用于安装望远镜系统,一般需考虑视宁度和地表湍流等因素,因此一般设计的相对较低,位于图中右侧,且观测平台周围要设置一圈深坑用于隔绝外部大气的影响,因此,主镜室的安装过程需跨越空间上的障碍,克服安装和测试平台8和观测平台6之间的高度差异还需跨越二值之间的深坑。本发明借助于运输框架组件2实现整个装置的刚度支撑,其上部安装着主镜室安装组件1,二者在运输过程借助于圆周均布的六组楔形块1.2和固定螺钉1.3实现完全锁紧;下部设置着轮组切换组件3,利用内圈轮组和外圈轮组的相互切换,配合爬升和下降组件,用于平地运输和跨地形可爬升安装及运输。
将爬升和下降组件7设置在深坑的两端,其支腿共有四组,两组分布在安装和测试平台8上,另外两组设置在观测平台6上。支腿上部安装着重载丝杠和丝杠螺母,通过前期反复调试,将连接在四组丝杠螺母上的通道组件完全调整至水平状态,用于支撑运输框架组件2和主镜室安装组件1。通过高度的精确调整和外圈轮组和内圈轮组的切换过程,可以实现动力轮的切换,保证运输框架组件2成功越过深坑并爬升至望远镜基座5平面上,实现跨地形的运输和安装。
整个安装和运输的过程可参考图1、图2和图3三个过程。这三个过程分别为:
1、首先主镜室安装组件1和运输框架组件2在安装和测试平台8组装和检测完毕,开始运输的过程,此时外圈轮组和安装和测试平台8接触提供动力;
2、主镜室安装组件1和运输框架组件2前进至爬升和下降组件7处,内圈轮组和通道7.7平面接触,开始提供动力,前部外圈轮组悬空,此时动力轮为位于前端的内圈轮组和位于后端的外圈轮组,继续前进直至动力轮全部由内圈轮组承担并接触限位块处,主镜室安装组件1和运输框架组件2完全位于爬升和下降组件7上;此时四组私服电机开动带动丝杠螺母调整,带动爬升和下降组件7直至外圈轮组底部至望远镜基座5平面处停止,第二过程结束;
3、内圈轮组提供动力前进,悬空的外圈轮组逐渐走入望远镜基座5平面上,此时动力系统逐渐由内圈轮组向外圈轮组切换,直至全部由外圈轮组承担并走入望远镜基座5上,同样设置限位装置停车;由位于运输框架组件2和主镜室安装组件1之间的主镜室升降组件9提供升力控制直至主镜室贴近上端的望远镜顶部系统4,完成整个过程的运输和定位安装。整个过程在无需重型起重吊车和不影响上端结构的前提下,实现主镜室的运输和安装,完成了跨越观测平台和安装测试平台之间的深坑和高度障碍,实现跨地形跨越障碍的安全可靠的运输和安装。
结合图4,该图所示为上述过程2,所述主镜室安装组件1和运输框架组件2前进至全部位于爬升和下降组件7上。所述外圈轮组共包含六个运输轮,成两行,每行3个分布在运输框架组件外围处;所述内圈轮组共包含六个运输轮,成两行,每行3个分布在运输框架组件内圈处。通道与所述运输框架组件2表面的高度差与所述外圈轮组3.1和内圈轮组3.2的高度差相同,从侧视视图来看,只能看到最后段的两个外圈轮组和两个内圈轮组。可以观察到此时内圈轮组和底部的通道7.7接触,动力轮全部由内圈轮组承担,外圈轮组位于内圈轮组之外,虽然其高度比内圈轮组低,但由于通道7.7位于整个爬升和下降组件7的高点,导致此时六组外圈轮组全部悬空,不提供动力。采用该设计方法的原因在于:在没有起重机械的帮助下,将重量较大的主镜室安装组件1重量切换到爬升和下降组件7是比较论难的;而在爬升完毕后,还需将重量再切换给望远镜基座5。借用两组轮组之间的巧妙切换可以实现上述重量的切换。
结合图5,所述主镜室安装1是旋转对称结构,主镜室1为圆柱件且中心厚度较厚,边缘厚度较薄的结构。中心用于固定主镜和安装主镜支撑结构,边缘则用于安装、对接运输等的需求。为保证其运输过程的稳定和安全,其下部60°圆周均布设置6组楔形块1.2、固定螺钉1.3和固定块1.4;通过固定螺钉1.3安装在下端的运输框架组件的螺纹孔内固定螺钉同时保证固定块位置固定,将紧靠的楔形块固定死,完全限制了主镜室的自由度,避免了运输过程出现晃动、振动等危险干扰。
结合图6和图7,所述跨地形可爬升安装及运输装置包含运输框架组件2,运输框架组件2底部安装着轮组切换组件3。其中,运输框架组件2是整个运输装置的主体结构,承担着主镜室全部的重量,采用如下所述结构保证其刚度。其全部为方钢焊接实现,中心由中心圆盘2.2用于和上端的主镜室同心定位且为外围的结构提供焊接基座;从中心圆盘2.2向外采用45度倾斜状态焊接的是斜角方钢2.1,4组斜角方钢圆周均布,且斜角方钢中间采用加强方钢2.3,主要为运输框架组件2提供刚度支持,同时为内圈轮组3.2提供安装基础;斜角方钢外围采用高度和厚度较大的大型方钢,分别为外框方钢2.4和横向方钢2.5,主要为外圈轮组3.1提供安装基础,采用大型方钢的原因在于为外圈轮组3.1和内圈轮组3.2提供高度差,且上端连接着主镜室,是整个运输框架组件2的主体结构,保证有较高的刚度。在外围还有6组圆周均布的三角板2.6,位于6组圆周均布的主镜室升降组件下部,用于保证主镜室顶升安装过程的刚度需求。从图中也可以看到轮组切换组件3共包含两组高度存在差异的外圈轮组和内圈轮组构成,其空间分布特点。外圈轮组在外端和前端,内圈轮组在内端,用于状态的切换过程。外圈轮组高度较低,负责平行路面上的运输;内圈轮组高度较高,负责跨越地形障碍和爬升下降等。
结合图8和图9,所述跨地形可爬升安装及运输装置包含爬升和下降组件7,爬升和下降组件设置在地形出现高度差异、地形高低不平、存在障碍的位置,通过和所述轮组切换组件3的相互配合,将运输轮从所述外圈轮组3.1切换到所述内圈轮组3.2,实现所述运输框架组件2的升降控制和跨地形运输,把要安装的大型望远镜主镜室提升到望远镜基座上,并实现和望远镜其他结构之间的连接。所述爬升和下降组件7包含4组伺服电机7.5负责提供动力,伺服电机通过传动轴7.4和联轴器7.3将动力传递给斜齿轮7.2,再通过锁紧螺母7.6将动力传递给重载丝杠7.10使其进行旋转,由于4组重载丝杠7.10上端的丝杠螺母7.9,通过安装螺钉7.1固定在通道横向型材7.13,丝杠螺母无法旋转即开始进行升降控制。为保证支撑刚度,通道纵向型材7.12、通道斜向型材7.14、通道方钢7.8均采用方钢结构焊接,其中通道纵向型材7.12共两组,位于主镜室前进的垂直方向;通道纵向型材7.12共四组,用于安装丝杠螺母,位于主镜室前进方向;通道斜向型材7.14共四组,圆周均布提供支撑刚度;通道方钢7.8和通道7.7各两组,位于通道纵向型材和通道斜向型材上部,用于和内圈轮组3.2接触提供支撑。4组底板7.11位于重载丝杠底部,负责和平台支撑,提供稳定的支撑。
结合图10,所述跨地形可爬升安装及运输装置包含主镜室升降组件,6组圆周均布在主镜室底部,每组包含:过渡板9.1、顶升光轴9.2、液压缸9.3和顶升底板9.4。所述主镜室和运输框架组件中心圆盘同心定位,所述过渡板9.1用于连接主镜室升降组件9,用于主镜室安装到望远镜系统。顶升底板9.4安装在运输框架组件上,用于支撑连接。当主镜室需要升降控制和系统对接时,顶升光轴9.2可以在液压缸9.3中上下移动。六组同步移动实现主镜室的顶升控制。拆卸过程为上述过程的逆过程。
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
- 一种大型望远镜主镜室的跨地形可爬升安装及运输系统
- 一种大型望远镜主镜室系统安装定位装置及方法