一种大场景SAR图像目标位置快速定位的方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明属于SAR图像处理领域,特别涉及该领域中的一种大场景SAR图像目标位置快速定位的方法。
背景技术
合成孔径雷达(Synthetic Aperture Radar-SAR)是一种主动式的对地观测系统,可全天候、全天时进行实时观测,因此在环境监测、资源勘查、军事侦察等方面的应用上具有独特的优势。随着SAR成像技术的不断提高,成像覆盖面积越来越广,为了提高大场景SAR图像目标检测与识别的效率和准确率,快速、准确的确定目标位置显得尤为重要。距离-多普勒方法是目前SAR图像定位最常用的方法,该方法可以建立SAR斜距图像坐标和地理坐标之间的函数关系,实现机载SAR图像的目标定位,但该方法没有充分利用SAR图像辅助数据,且在求解距离-多普勒方程组时需要选择迭代的初值,初值的选择与定位精度相关,使得该方法的使用受到一定的限制;利用深度学习进行目标定位时,需要一定的样本进行训练学习,无法满足小样本需求。
发明内容
本发明所要解决的技术问题就是提供一种大场景SAR图像目标位置快速定位的方法,先利用SAR图像辅助数据和目标经纬度计算出目标区域,再对目标区域进行形态学滤波,实现目标位置的自动定位。
本发明采用如下技术方案:
一种大场景SAR图像目标位置快速定位的方法,其改进之处在于,包括如下步骤:
首先读取大场景SAR图像,解析得到图像方位向航线起始点A、航线终止点B′以及目标C的经纬度坐标,经过坐标系转换得到平面坐标,转换公式为:
X=(N+H)*cos(B)*cos(L)
Y=(N+H)*cos(B)*sin(L)
Z=[N*(1-e*e)+H]*sin(B)
其中,B为纬度,L为经度,H为高度,N为椭球面的曲率半径,e为椭球的第一偏心率,N和e分别由下述公式得到:
e=sqrt(a*a-b*b)/a
上式中,a为椭球的长半径,其值为6378137.0米,b为椭球的短半径,其值为6356752.3142米;
经过坐标系转换得到图像方位向航线起始点A、航线终止点B′以及目标C的平面坐标,算出目标C到图像距离向中心C′的距离CC′,得出目标C在SAR图像上的距离向坐标;
将目标C方位向坐标与航线起始点A方位向坐标做差值并转换成像素点数,得到目标C在SAR图像中的方位向坐标;
以上述计算的距离向和方位向共同组成的坐标为中心,截取边长为400*400的矩形,该区域为目标区域,
对目标区域图像进行图像增强,采用对数变换的灰度级对比度拉伸,假设原图像为f(x,y),变换后的图像为g(x,y),公式为:
上式中,s,m,k都是可选择的参数,
对图像增强后的目标区域图像进行二值化,再利用开运算对目标区域二值图像进行形态学图像处理,最后利用100*100的窗口遍历上述图像,选取像素总和最大的窗口为目标位置。
本发明的有益效果是:
本发明所公开的方法,充分考虑了SAR的成像特点,充分利用了辅助数据和实测目标的经纬度,可在SAR图像中准确找到目标区域。
本发明所公开的方法,通过形态学滤波,并结合100*100的窗口遍历目标区域图像,像素和总值最大的区域为目标位置。
本发明所公开的方法,可根据输入的原始SAR图像及其辅助数据、目标实测经纬度自动完成目标位置选取。
附图说明
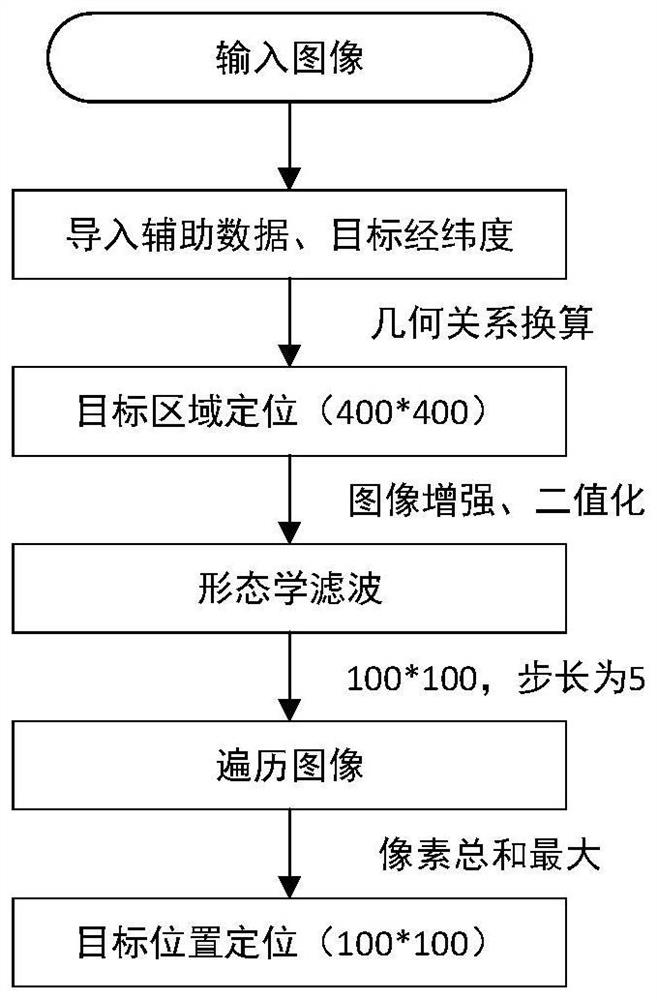
图1是本发明方法的流程图;
图2是目标车辆的光学图像;
图3是截取的局部大场景SAR图像;
图4是SAR成像的几何关系图;
图5是在截取的大场景SAR图像中的目标区域位置图;
图6是目标区域图像;
图7是图像增强后的目标区域图像;
图8是二值化后的目标区域图像;
图9是形态学图像处理后的目标区域图像;
图10是在目标区域中的目标位置图;
图11是在截取的大场景SAR图像中的目标位置图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
本发明方法主要由目标区域定位和目标位置定位两个步骤组成。
目标区域定位主要包含以下两步:首先根据SAR图像辅助数据解算出航迹起始点和终止点的经纬度,再通过坐标系转换,得到航迹起始点和终止点的平面坐标,利用现场实测的目标经纬度坐标经过相同的坐标系转换,得到目标的平面坐标;然后根据目标、航迹起始点、航迹终止点的平面坐标,推算出目标在SAR图像中的坐标,并以计算的坐标为中心,边长为400*400的像素点区域作为目标区域。
目标位置定位主要包含以下两步:首先对框选的目标区域进行图像增强,以提高目标的相对亮度,再进行二值化处理;然后对二值化后的图像进行形态学图像处理,再用100*100的滑窗遍历整幅图像,像素值总和最大的区域为目标位置。
实施例1,本实施例公开了一种大场景SAR图像目标位置快速定位的方法,如图1所示,包括如下步骤:
本实施例选用实采目标进行实施方式描述,目标车辆光学图像如图2所示。
首先读取大场景SAR图像,本实施例选取的SAR图像大小为11337*9944,由于图像过大,图3为截取的局部大场景SAR图像(3000*3000)。
导入图像对应的辅助数据,经解析得到图像方位向航线起始点A和航线终止点B′的经纬度坐标,目标C的经纬度坐标通过RTK获得,经过坐标系转换得到平面坐标,选用WGS84球体模型,其转换公式为:
X=(N+H)*cos(B)*cos(L)
Y=(N+H)*cos(B)*sin(L)
Z=[N*(1-e*e)+H]*sin(B)
其中,B为纬度(单位为rad),L为经度(单位为rad),H为高度(单位为m),N为椭球面的曲率半径,e为椭球的第一偏心率,N和e分别由下述公式得到:
e=sqrt(a*a-b*b)/a
上式中,a为椭球的长半径,其值为6378137.0米,b为椭球的短半径,其值为6356752.3142米;
经过坐标系转换得到图像方位向航线起始点A、航线终止点B′以及目标C的平面坐标,算出目标C到图像距离向中心C′的距离CC′,由此可以得出目标C在SAR图像上的距离向坐标;
如图4所示,根据SAR成像几何关系,算出目标C到航线的距离CD′,SAR的航路规划是以目标C为中心,理论上目标C应处于图像的中心位置,图4中C点为目标位置,AB为航路规划时设计的航线,理论上采集的图像区域为实线所示的矩形。但图像采集时无人机由人为控制,且在飞行中受到风速等因素的影响,使得实际的航迹(如图中AB′所示)与规划的航迹出现偏差,造成目标不再处于图像的中心位置,实际采集图像区域为虚线所示的矩形,此时目标距离向的中心为C′,此时CD′的距离为:
由几何关系可知,CD与C′D′相等,根据CD′的值可以求出CC′的距离。
将目标C方位向坐标与航线起始点A方位向坐标做差值并转换成像素点数,得到目标C在SAR图像中的方位向坐标;
以上述计算的距离向和方位向共同组成的坐标为中心,截取边长为400*400的矩形,如图5框内部分和图6所示,该区域为目标区域,
为了增大图像的动态范围,使得图像的特征、纹理更明显,对目标区域图像进行图像增强,采用对数变换的灰度级对比度拉伸,假设原图像为f(x,y),变换后的图像为g(x,y),公式为:
上式中,s,m,k都是可选择的参数,f(x,y)+1是为了避免对0求对数。图7是图像增强后的目标区域图像。
对图像增强后的目标区域图像进行二值化,图8是二值化后的目标区域图像。
再利用开运算对目标区域二值图像进行形态学图像处理,图9是形态学图像处理后的目标区域图像。
形态学图像处理可对图像进行去燥、增强、提取图像分量等,其中膨胀和腐蚀运算是形态学图像处理的基础。膨胀是一个求局部最大值的过程,可将二值图像“加长”或者“变粗”,通常会使边缘更加圆滑。而腐蚀与膨胀的效果正好相反,它可以收缩或者细化二值图像中的对象,线条明显变细,提出图像中对象的骨架。其数学表达式分别为:
开运算是A被B腐蚀后再用B来膨胀后的结果,记作A°B,可以用来去噪,消除一些小的像素点,断开了狭窄的连接,去掉细小的突出部分,数学表达式为:
最后利用100*100的窗口遍历上述图像,选取像素总和最大的窗口为目标位置。图10是在目标区域中的目标位置图;图11是在截取的大场景SAR图像中的目标位置图。
- 一种大场景SAR图像中舰船目标切片快速提取方法
- 一种含非合作目标的大场景SAR图像快速生成方法