一种智慧型双层组合立体停车设备
文献发布时间:2023-06-19 09:35:27
技术领域
本发明属于停车设备领域,具体涉及一种智慧型双层组合立体停车设备。
背景技术
立体停车设备一般用于建设单位专门设计的立体停车场或大型公共管理、经营的地下立体停车库等。现有的停车设备一般都有上下两层并采用升降横移式的结构将汽车运到上层,例如说上层有三个停车位和三个载车板时,下层对应有三个停车位和两个载车板,空出一个车位没有载车板,以供上层载车板升降,使用时,下层两个停车位上的载车板通过横移能够使任一一个停车位空出,然后该停车位上方停车位上的载车板下降到地面,汽车驶入载车板,载车板再上升,完成存车,之后再通过下层两个载车板的横移使另一个停车位空出,再进行存车,以此类推,当上层停车位存满时,再存下层停车位,取车时,下层停车位的汽车很容易取出,上层停车位的汽车在取车时,需要通过下层两个载车板的横移时使所取汽车下方的停车位空出,然后该汽车的载车板下降到地面,取出汽车。
总的来说,上述这种升降横移类的停车设备在存取上层车辆时操作繁琐,上下层车辆存取存在需要避让的问题,费劲费时。
发明内容
为了弥补现有技术的不足,本发明提供一种智慧型双层组合立体停车设备的技术方案。
所述的一种智慧型双层组合立体停车设备,其特征在于包括
机架,所述机架包括弓形梁;
载车组件,所述载车组件支撑设置于机架上,其用以载车;
动力牵引梁,所述动力牵引梁用以牵引载车组件沿弓形梁移动,使载车组件能够从弓形梁顶部下降至地面,从地面上升至弓形梁顶部;
驱动组件,所述驱动机构用以驱动动力牵引梁沿弓形梁活动;以及
活动支撑臂组件,所述活动支撑臂组件用以在载车组件升降过程中对载车组件进行支撑,使载车组件在沿弓形梁升降过程中保持水平。
所述的一种智慧型双层组合立体停车设备,其特征在于所述活动支撑臂组件位于机架前端,其包括多连杆机构和斜撑杆,多连杆机构一端与机架转动安装,另一端与载车组件转动安装,其包括若干根依次转动安装的连杆,斜撑杆用以对所述多连杆机构进行支撑,多连杆机构中,至少部分相邻连杆之间具有角度限位,使多连杆机构在随着车载组件升降而进行翻转折叠的过程中对车载组件进行支撑。
所述的一种智慧型双层组合立体停车设备,其特征在于所述多连杆机构包括依次转动安装的第一连杆、第二连杆、第三连杆、第四连杆、第五连杆和第六连杆,第一连杆与机架转动安装,第六连杆与载车组件转动安装,所述第一连杆与第二连杆之间夹角最大能够转动到180°,第二连杆与第三连杆之间夹角最大能够转动到180°,第三连杆与第四连杆之间夹角最大能够转动到180°,第四连杆与第五连杆之间能够转动的最小角度为120-170°,能够转动的最大角度为180°,动力牵引梁与载车组件之间夹角最大能够转动到180°。
所述的一种智慧型双层组合立体停车设备,其特征在于所述斜撑杆一端能够沿第二连杆滑动,另一端与第四连杆转动安装。
所述的一种智慧型双层组合立体停车设备,其特征在于所述第五连杆靠近第六连杆一端设置用以与弓形梁滑动配合的第一滑轮。
所述的一种智慧型双层组合立体停车设备,其特征在于所述驱动组件包括环绕弓形梁布置的传动带机构和用以驱动传动带机构工作的电机传动模块,动力牵引梁一端与传动带机构的传动带配合连接,传动带能够带动动力牵引梁沿着弓形梁行走,动力牵引梁另一端与载车组件转动安装,当动力牵引梁转动至与载车组件水平时,动力牵引梁与载车组件挡接,使两者能保持水平。
所述的一种智慧型双层组合立体停车设备,其特征在于所述动力牵引梁与传动带配合的一端通过设置的行走轮在工形梁上行走。
所述的一种智慧型双层组合立体停车设备,其特征在于所述机架还包括配合安装于弓形梁前部上并用以导向支撑载车组件平移的支撑杆,支撑杆上设置用以与载车组件滑动配合的第二滑轮。
所述的一种智慧型双层组合立体停车设备,其特征在于所述载车组件包括下层载车板和上层载车板,上层载车板能够相对下层载车板转动。
所述的一种智慧型双层组合立体停车设备,其特征在于所述弓形梁、动力牵引梁、活动支撑臂组件左右分别设置一个,两个活动支撑臂组件之间固定安装联结杆。
与现有技术相比,本发明设置了机架、载车组件、动力牵引梁、驱动组件和活动支撑臂组件,能实现上下两层停取车无须避让,独立存取的功能,大大简化了存取车的操作,实用性非常强。
附图说明
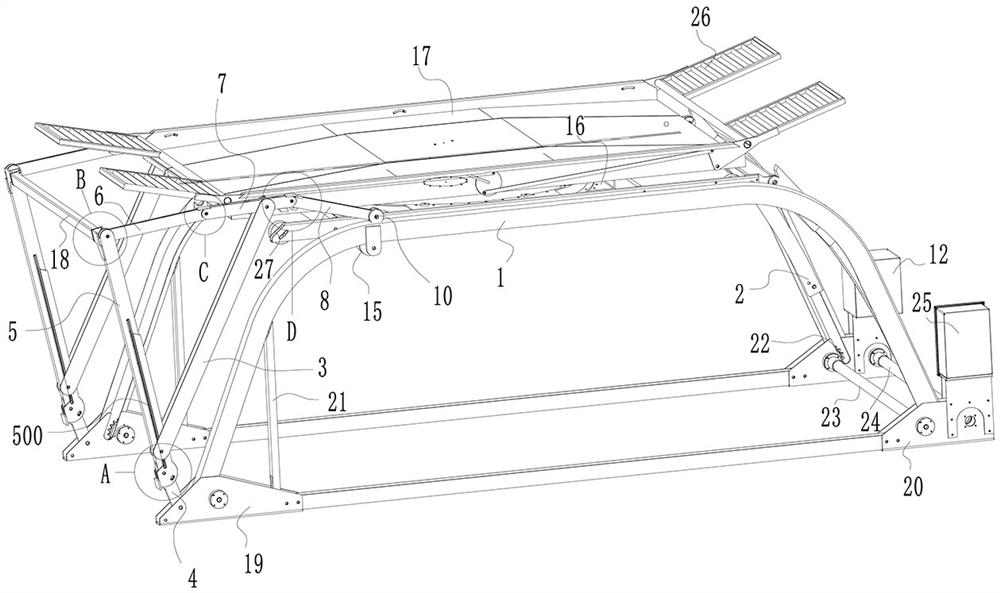
图1为本发明结构示意图之一,其中载车组件处于弓形梁顶部;
图2为图1中A处放大图;
图3为图1中B处放大图;
图4为图1中C处放大图;
图5为图1中D处放大图;
图6为本发明结构示意图之二,其中载车组件处于弓形梁顶部;
图7为本发明结构示意图之三,其中载车组件横移至弓形梁顶部前端;
图8为图7中E处放大图;
图9为图7中F处放大图
图10为本发明结构示意图之四,其中载车组件处于地面;
图11为本发明中机架结构示意图。
具体实施方式
在本发明的描述中,需要理解的是,术语“一端”、“另一端”、“外侧”、“上”、“内侧”、“水平”、“同轴”、“中央”、“端部”、“长度”、“外端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
下面结合附图对本发明作进一步说明。
如图所示,一种智慧型双层组合立体停车设备,包括
机架,所述机架包括左右两个弓形梁1,弓形梁1的结构近似上窄下宽的等腰梯型,其顶部前后两端均采用圆弧过渡,其底部前侧固定安装第一定位架19,其底部后侧固定安装第二定位架20,弓形梁1的前端还固定安装支撑加强杆21;
载车组件,所述载车组件支撑设置于机架上,其用以载车;
动力牵引梁2,所述动力牵引梁2有两个,分别位于两个弓形梁1上,用以牵引载车组件沿弓形梁1移动,使载车组件能够从弓形梁1顶部下降至地面,从地面上升至弓形梁1顶部;
驱动组件,所述驱动机构用以驱动动力牵引梁2沿弓形梁活动;以及
活动支撑臂组件,所述活动支撑臂组件有两组,分别位于两个弓形梁1上,用以在载车组件升降过程中对载车组件进行支撑,使载车组件在沿弓形梁1升降过程中保持水平。
作为优化:所述活动支撑臂组件位于机架前端,其包括多连杆机构和斜撑杆3,多连杆机构一端与弓形梁1转动安装,另一端与载车组件转动安装,其包括若干根依次转动安装的连杆,斜撑杆3用以对所述多连杆机构进行支撑,多连杆机构中,至少部分相邻连杆之间具有角度限位,使多连杆机构在随着车载组件升降而进行翻转折叠的过程中对车载组件进行支撑。
进一步地,所述多连杆机构包括依次转动安装的第一连杆4、第二连杆5、第三连杆6、第四连杆7、第五连杆8和第六连杆9,第一连杆4与第一定位架19转动安装,第六连杆9与载车组件转动安装,所述第一连杆4与第二连杆5之间夹角最大能够转动到180°,最小角度为0°,第二连杆5与第三连杆6之间夹角最大能够转动到180°,最小角度为0°,第三连杆6与第四连杆7之间夹角最大能够转动到180°,最小角度为0°,第四连杆7与第五连杆8之间夹角最小能够转动到145°,最大能够转动到180°,动力牵引梁2与载车组件之间夹角最大能够转动到180°,最小角度为0°。
更具体地,第一连杆4与第二连杆5连接一端、背向弓形梁1一侧设置第一挡块400,当第二连杆5相对第一连杆4转动到180°时,第二连杆5与第一挡块400挡接。第二与第三连杆6连接一端、背向弓形梁1一侧设置第二挡块500,当第三连杆6相对第二连杆转动到180°时,第三连杆6与第二挡块500挡接。第三连杆6连接第四连杆7一端、背向弓形梁1一侧设置第三挡块600,当第四连杆7相对第三连杆6转动到180°时,第四连杆7与第三挡块挡接。第四连杆7与第五连杆8连接一端、背向弓形梁1一侧设置第四挡块701,第四连杆7与第五连杆8连接一端、面向弓形梁1一侧设置第五挡块700,第五连杆8与第四连杆7连接一端、背向弓形梁1一侧设置第六挡块801,第五连杆8与第四连杆7连接一端、面向弓形梁1一侧设置第七挡块800,当第五连杆8相对第四连杆7转动到180°时,第四挡块701与第六挡块801挡接,第五连杆8相对第四连杆7转动到145°时,第五挡块700与第七挡块800挡接。
更进一步地,所述第二连杆5上开设滑槽500,斜撑杆3一端与该滑槽500滑动配合,使得斜撑杆3该端能够沿第二连杆5滑动,斜撑杆3另一端与第四连杆7转动安装。
更进一步地,所述第五连杆8靠近第六连杆9一端设置用以与弓形梁1滑动配合的第一滑轮10。
作为优化:所述驱动组件包括环绕弓形梁1布置的传动带机构11和用以驱动传动带机构11工作的电机传动模块12,动力牵引梁2一端与传动带机构11的传动带配合连接,传动带能够带动动力牵引梁2沿着弓形梁1行走,动力牵引梁2另一端与载车组件转动安装,当动力牵引梁2转动至与载车组件水平时,动力牵引梁2与载车组件挡接,使两者能保持水平。其中,电机传动模块12包括电机、动力传动箱和传动轮等结构,动力传动箱的输出轴通过链条与传动轮传动配合,传动轮与驱动轮22同轴,驱动轮22能够带动传动带机构11的传动带沿弓形梁1运转。传动带机构11优选为链条机构,驱动轮优选为链轮,链条机构的链条沿弓形梁1内部铺设,弓形梁1内还设置若干用以引导链条的链轮。
进一步地,两个弓形梁1均带有驱动轮22,两个驱动轮22通过联动轴连接,联动轴外罩设联动轴保护管23。
进一步地,本发明还配置动力控制箱25,动力控制箱25与动力传动箱相对设置,动力控制箱25与动力传动箱之间配合设置电线和罩设于电线外的线路保护管24。
进一步地,所述动力牵引梁2与传动带配合的一端通过设置的行走轮13在工形梁1上行走。
作为优化:所述机架还包括配合安装于弓形梁1前部上并用以导向支撑载车组件平移的支撑杆14,支撑杆14上设置用以与载车组件滑动配合的第二滑轮15。
作为优化:所述载车组件包括下层载车板16和上层载车板17,上层载车板17能够相对下层载车板16转动,具体是通过旋转机构实现上层载车板17的旋转,此为本领域的公知技术,不再赘述。
在上述结构中,上层载车板17的前后两端均设置下榻板26。下层载车板16的四周安装底轮27。
在上述结构中,所述动力牵引梁2与下层载车板16转动安装,其与下层载车板16连接一端、背向弓形梁1一侧设置第八挡块200,下层载车板16与动力牵引梁2连接的部分设置第九挡块1600,当动力牵引梁2相对下层载车板16转动至水平时,第八挡块200与第九挡块1600挡接。
作为优化:两个活动支撑臂组件之间固定安装联结杆18,联结杆18具体安装于两个第二连杆5之间。
本发明停车时,一开始载车组件停在弓形梁1顶部,先是电机传动模块12带动驱动轮22工作,驱动轮22带动传动带机构11工作,传动带机构11的传动带绕弓形梁1运转,同时带动动力牵引梁2在弓形梁1上往前行走,动力牵引梁2带动车载组件向前平移,当动力牵引梁2的行走轮13移动到弓形梁1的顶部时,动力牵引梁2的第八挡块200与下层载车板16的第九挡块1600挡接,使动力牵引梁2与下层载车板16保持水平,在车载组件向前平移的过程中,多连杆机构开始翻转折叠,转动到如图7所示状态时,第五挡块700与第七挡块800的挡接为支撑载车组件起到重要作用,然后第二连杆5转动至水平并着地,当行走轮13移动到弓形梁1前端过渡段开始下移时,多连杆机构中的第三连杆6、第四连杆7和第五连杆8进一步翻折并最终全部转动至水平并着地,使载车组件平稳地降至地面,在多连杆机构整个翻折过程中,斜撑杆3起到支撑作用,之后旋转机构驱动上层载车板17旋转90°或120°,再进行取车或者存车。
对本发明的工作原理作进一步说明:
1)如图1所示,本发明处于静止状态,第二连杆5与地面呈100°,当使用者需要停泊上层车位时,启动停车设备,设备的电机传动模块12输出动力,通过链轮链条传递给动力牵引梁2,动力牵引梁2将动力传递给下层载车板16,上层载车板17跟着下层载车板16同步移动。
2)如图7所示,载车组件直行平移至机架前方,当载车组件直行平移时,下层载车板16共有四个定位受力点。前面是左右两个第六连杆9与下层载车板16连接,前面是左右两个动力牵引梁2与下层载车板16尾部连接,然后动力牵引梁2头部的行走轮13在弓形梁1内滑动,前后受力都是在弓形梁1上。前面的活动支撑臂组件共有6根连杆,左右对称12根,这些连杆在动力牵引梁2的驱动下,分别按照设计时的角度进行自动调整,实现与载车组件保持平衡与位移速度同步。此时,第二连杆5已落地,与地面平行,而第三连杆6与第二连杆5呈100°夹角。
3)如图10所示,载车组件直行平移至地面,当载车组件直行平移到弓形梁1前端的斜坡段时,有驱动动力继续输送,这是后面动力牵引梁2的行走轮13开始沿着弓形梁1下滑,同时前面的活动支撑臂组件受下层载车板16力量的驱动,第三连杆6与后面行走轮速度同步慢慢角度变大,因此,载车组件第六连杆9的动态调节下同步下降,一直下降至地面,所有连杆均与地面呈180°平行状态时,电机传动模块12停止工作,最后旋转机构驱动上层载车板17旋转90°或120°,在转动角度即将到达设定角度前10°时,上层载车板17前后两端的下榻板26自动下降至路面落地,使得停泊车辆顺利、方便得驾驶到载车组件上。载车组件带着车辆回到弓形梁1顶部的动作原理与上述动作原理相同,不再赘述。
本发明的停车设备系统可以用于一般房产公司层高3.5米以上的地下车库或公寓房只有1个停车位解决停泊2辆车的技术,设计理念是创造新思维,新空间,专门研发、设计一款进化停车系统设备。其最大优点是①安装场地占地面积小(相当于一个标准停车位置),无需开挖路面和预制基础,直接用铆栓固定在混泥土地面即可,安装工期短;②设计为框架排式组合机架使停车设备受力均匀,结构稳固,安装调试方便;③上、下2层停、取车无须避让,独立存取;④用新能源动力配PWM直流调速电机技术做动力驱动,噪音低、设备运行动作安全、平稳、低碳节能环保等,特别是不受电网停电影响停车或取车等优点;⑤智能化控制系统使得操作简单、所有设备动作由PLC程序控制,动作过程语言提示、闪光警示,用光、电传感技术实时对设备运行状态动作监测、周边环境的检测等,使得设备动作位置精确运行等。
本发明的特点:
1、只要原车位地面是混泥土基础条件,就不需要开挖,可以直接将停车设备用铆栓固定在混泥土地面即可。如果地面新开掘停车位,也只要按一般“室外停车场设计规范”的地面结构做法,无特殊要求。多台停车设备可以单机独立安装,也可以组成排式连接组合安装。
2、用户在停取车过程中,上、下车位无需避让,地面车位与日常车位相同:
当上层车位停泊时,只需简单操控(按停泊键),上层载车板整个平台一体向外移动,等移动到机架终点设定位置后,上层载车板自动下降落地,然后再旋转90度(可以根据实地环境任意设定角度),旋转到达行车道后自动放下载车板下榻板,司机可以将车辆驶入上层载车板,整个过程80秒时间。司机下车后,红外自动检测车辆停泊是否正确(如车辆停泊位置超出检测范围,有语言提示),检测正常时,按操作停泊键,载车板装载着车辆按“原路”返回上层停车位。
当需要取停泊车辆时,只需简单操控(按取车键),上层车辆按停泊时下降过程,自动将车辆移动至地面车道上。使用该立体停车设备,原来1个车位上就能停2部车了,而且2部车在停、取车时互不影响。
3、本发明操控简单、智能,用遥控器操作。存、取车分别一键控制。而且载车板带有自动复位功能选择开关,一旦选择投入,车辆取车离开后,忘记将载车板遥控复位,系统自动检测周边环境无误,自动启动,将载车板自动复位。
4、设备权属清晰:本发明可以安装在独立车位内,因此,产权归属非常清晰,可以从点到面便于推广。
5、对多台组合的立体停车设备场所,存、取车时间快,都可以独立操作,即使有一设备发生故障,也不影响其它停车设备正常使用。
6、利用车位共享停车设备在自身充电外还带新能源汽车充电桩(选配),有利于新能源电动汽车的推广使用。
7、停车设备在明显区域放置紧急停止按钮,运行中只要按下紧急停止按钮设备立即停止运行。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种智慧型双层组合立体停车设备
- 一种双层无避让侧方位机械式立体停车设备