一种基于后视摄像头的盲区监测方法
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及车辆盲区监测技术领域,尤其涉及一种基于后视摄像头的盲区监测方法。
背景技术
在当前汽车行业,随着汽车技术的快速发展,无论是传统汽车还是新能源汽车的安全配置都越来越高,在原有被动安全的基础上,汽车会开发出越来越多的主动安全提醒功能,例如360度影像、并道辅助、前后碰撞预警、盲区监测等。
目前全景项目中BSD(盲区监测)功能的实现原理为,利用后视摄像头对侧后方车辆进行识别,主要对目标车辆前脸的特征点进行提取并进行识别,判断目标车辆的位置,从而在其变道时进行安全预警。因此,BSD在车辆识别和车辆跟踪时极为重要。
但是,现有的车载BSD功能,在侧后方的目标车辆的超车过程中,当目标车辆的车身前半部分超过本车的后尾门时,由于后视摄像头无法识别到目标车辆的汽车前脸,特征目标消失,将出现误报的情况。
发明内容
本发明提供一种基于后视摄像头的盲区监测方法,解决了现有的盲区监测技术算法复杂、盲区车辆识别准确率低,导致盲区监测效率低的技术问题。
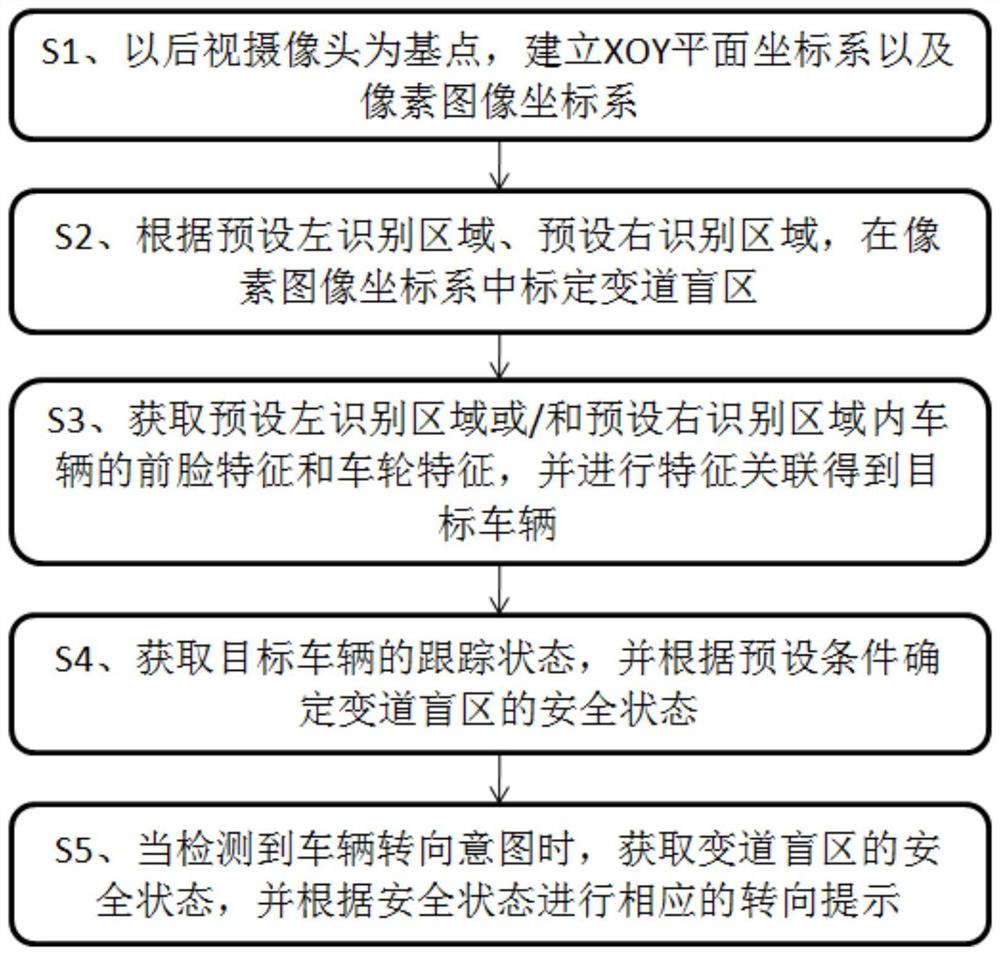
为解决以上技术问题,本发明提供一种基于后视摄像头的盲区监测方法,包括步骤:
S1、以后视摄像头为基点,建立XOY平面坐标系以及像素图像坐标系;
S2、根据预设左识别区域、预设右识别区域,在所述像素图像坐标系中标定变道盲区;
S3、获取所述预设左识别区域或/和所述预设右识别区域内车辆的前脸特征和车轮特征,并进行特征关联得到目标车辆;
S4、获取所述目标车辆的跟踪状态,并根据预设条件确定所述变道盲区的安全状态。
本基础方案以后视摄像头为监测核心建立XOY平面坐标系,利用后视摄像头采集后方来车的路面图像,根据像素图像坐标系与XOY平面坐标系的对应关系,进行图像转换,并标定出预设左识别区域、预设右识别区域和变道盲区;当目标车辆进入变道盲区时,其车身前半部分超过车辆尾部后,此时采用车轮特征识别,车辆特征明显且容易训练,可进一步提高目标车辆的识别准确率;根据预设条件与目标车辆当前的跟踪状态,直接确定变道盲区的安全状态,通过提升车辆盲区监测目标车辆的跟踪能力,提高车辆的安全性能。
在进一步的实施方案中,所述步骤S1包括:
S11、以当前车辆的后视摄像头为坐标原点,以车辆径向、车辆轴向为横轴、纵轴建立XOY平面坐标系;
S12、获取路面图像,并根据所述XOY平面坐标系建立对应的像素图像坐标系。
在进一步的实施方案中,所述步骤S2包括:
S21、根据所述后视摄像头的视场角,确定所述预设左识别区域、所述预设右识别区域与左变道盲区、右变道盲区的分界线;
S22、根据预设车辆长度、预设车辆宽度、所述当前车辆的边缘线以及所述分界线,在所述像素图像坐标系中标定所述预设左识别区域、所述预设右识别区域;
S23、根据驾驶员的有效视角确定的所述左变道盲区、所述右变道盲区的终止线,并结合所述分界线,在所述像素图像坐标系中标定所述左变道盲区、所述右变道盲区。
本方案立足于实际的车辆性能,根据当前车辆后视摄像头的视场角范围,明确车辆变道盲区的实际起始位置(即分界线),以此提高对目标车辆进入变道盲区的检测精度;预先设置预设车辆长度、预设车辆宽度,划分出预设左识别区域、所述预设右识别区域,可提前识别出对当前车辆左右两侧存在变道干扰因素的目标车辆。
在进一步的实施方案中,所述步骤S3包括:
S31、获取所述预设左识别区域或/和所述预设右识别区域内的道路图像;
S32、识别所述道路图像,提取出车轮特征以及车辆前脸特征并进行特征关联,得到目标车辆。
本方案通过后视摄像头实时地采集当前的道路图像,对目标车辆进行识别、监测;有针对性地从道路图像中提取出车轮特征以及车辆前脸特征,可有效降低目标车辆的识别难度。
在进一步的实施方案中,在所述步骤S4中,所述获取所述目标车辆的跟踪状态具体为:
从所述后视摄像头中获取当前路面图像并进行图像识别,依次判断所述目标车辆的所述车辆前脸特征以及所述车轮特征是否存在;
若所述车辆前脸特征存在,则判断所述目标车辆未进入所述变道盲区;
若所述车辆前脸特征消失、所述车轮特征存在,则判断所述目标车辆进入所述变道盲区。
本方案根据车辆的前进时,在后视摄像头采集到的道路图像中的变化趋势,设计了对应于目标车辆当前跟踪状态的判断条件,首先是确定车辆前脸特征的存在与否,若存在则代表目标车辆还未进入变道盲区,若辆前脸特征消失、所述车轮特征存在则表示目标车辆进入变道盲区,通过简单的特征识别和条件判断即可确定出当前车辆后方来车(目标车辆)的跟踪状态,算法简单、准确率高。
在进一步的实施方案中,在所述步骤S4中,所述根据预设条件确定所述变道盲区的安全状态具体为:
当判断到所述左变道盲区存在所述目标车辆时,将所述变道盲区的安全状态标记为QL;当判断到所述右变道盲区存在所述目标车辆时,将所述变道盲区的安全状态标记为QR;
当判断到所述左变道盲区/右变道盲区不存在所述目标车辆时,将所述变道盲区的安全状态,标记为NQL/NQR。
在进一步的实施方案中,本发明还包括步骤:
S5、当检测到车辆转向意图时,获取所述变道盲区的安全状态,并根据所述安全状态进行相应的转向提示。
本方案通过后视摄像头实时地跟踪后方来车(目标车辆)的行进状态,根据是否变道盲区划定安装状态并进行标记,从而在车辆转向时,可快速向车载控制中心反馈两侧道路安全,随后发出转向提示以提醒驾驶员变道,从而进一步提高车辆驾驶的安全性。
在进一步的实施方案中,在所述步骤S21中,所述分界线为平行于Y轴的直线:
当所述后视摄像头的视场角小于180°时,所述分界线的横坐标为:C=D*tanβ;否则,C=0,其中:C为所述分界线的横坐标,D为所述预设车辆宽度,β为所述后视摄像头的视场角。
本方案根据后视摄像头的视场角大小,结合预设车辆宽度,将变道盲区的区域范围数据化的呈现在像素图像坐标系中,不仅有利于变道盲区的安全状态的精确性检测,还可在必要时进行图像显示,方便驾驶员直观地获取目标车辆的行进状态,从而作出适应性的驾驶策略(例如是否变道)。
在进一步的实施方案中,在所述步骤S3中:所述车轮特征包括轮胎特征、轮眉特征、轮毂特征。
附图说明
图1是本发明实施例提供的一种基于后视摄像头的盲区监测方法的工作流程图;
图2是本发明实施例提供的像素图像坐标系中预设左识别区域、预设右识别区域和变道盲区的标定示意图;
图3是本发明实施例提供的后方来车示意图;
其中:预设左识别区域A、预设右识别区域B,左变道盲区L、右变道盲区R,当前车辆F0、目标车辆Fi,后视摄像头Q。
具体实施方式
下面结合附图具体阐明本发明的实施方式,实施例的给出仅仅是为了说明目的,并不能理解为对本发明的限定,包括附图仅供参考和说明使用,不构成对本发明专利保护范围的限制,因为在不脱离本发明精神和范围基础上,可以对本发明进行许多改变。
本发明实施例提供的一种基于后视摄像头Q的盲区监测方法,如图1~图3所示,在本实施例中,包括步骤S1~S5:
S1、以后视摄像头Q为基点,建立XOY平面坐标系以及像素图像坐标系,包括步骤S11~S12:
S11、以当前车辆F0的后视摄像头Q为坐标原点,以车辆径向、车辆轴向为横轴、纵轴建立XOY平面坐标系;
S12、获取路面图像,并根据XOY平面坐标系建立对应的像素图像坐标系。
S2、根据预设左识别区域A、预设右识别区域B,在像素图像坐标系中标定变道盲区,包括步骤S21~S23:
S21、根据后视摄像头Q的视场角,确定预设左识别区域A、预设右识别区域B与左变道盲区L、右变道盲区R的分界线;
分界线为平行于Y轴的直线:
当后视摄像头Q的视场角小于180°时,分界线的横坐标为:C=D*tanβ;否则,C=0,其中:C为分界线的横坐标,D为预设车辆宽度,β为后视摄像头Q的视场角。
S22、根据预设车辆长度、预设车辆宽度、当前车辆F0的边缘线以及分界线,在像素图像坐标系中标定预设左识别区域A、预设右识别区域B;
在本实施例中,预设车辆长度、预设车辆宽度可根据目前上市的车辆最长长度、宽度进行设置,也可根据实际需求进行设置。
预设左识别区域A与预设右识别区域B之间的间距为当前车辆F0的宽度W,此时:
预设左识别区域A为如下4个顶点连接而成的区域:A1(C,W/2),A2(C,D+W/2),A3(C+L,D+W/2),A4(C+L,W/2);
预设右识别区域B为如下4个顶点连接而成的区域:B1(C,-W/2),B2(C+L,-W/2),B3(C+L,-W/2-D),B4(C,-W/2-D)。
在车辆相对静止状态下,根据以上坐标数据在XOY平面坐标系中画线标记变道盲区,并通过后视摄像头对其进行标定,同时映射到像素图像坐标系中,完成标定。
S23、根据驾驶员的有效视角确定的左变道盲区L、右变道盲区R的终止线,并结合分界线,在像素图像坐标系中标定左变道盲区L、右变道盲区R。
左变道盲区L、右变道盲区R的起始线即为上述分界线;其终止线过驾驶员的有效视角与预设左识别区域A、预设右识别区域B外侧边缘线的交点,与Y轴平行。
本实施例立足于实际的车辆性能,根据当前车辆F0后视摄像头Q的视场角范围,明确车辆变道盲区的实际起始位置(即分界线),以此提高对目标车辆Fi进入变道盲区的检测精度;预先设置预设车辆长度、预设车辆宽度,划分出预设左识别区域A、预设右识别区域B,可提前识别出对当前车辆F0左右两侧存在变道干扰因素的目标车辆Fi。
本实施例根据后视摄像头Q的视场角大小,结合预设车辆宽度,将变道盲区的区域范围数据化的呈现在像素图像坐标系中,不仅有利于变道盲区的安全状态的精确性检测,还可在必要时进行图像显示,方便驾驶员直观地获取目标车辆Fi的行进状态,从而作出适应性的驾驶策略(例如是否变道)。
S3、获取预设左识别区域A或/和预设右识别区域B内车辆的前脸特征和车轮特征,并进行特征关联得到目标车辆Fi,包括步骤S31~S32:
S31、获取预设左识别区域A或/和预设右识别区域B内的道路图像;
S32、对道路图像进行图像处理(例如灰度处理)后进行识别,提取出车轮特征以及车辆前脸特征并进行特征关联,得到目标车辆Fi。
具体的,将提取出的车辆前脸P1到P2之间的车轮目标标记为R1f、R1r,并关联P1、R1f、R1r组成目标车辆F1,依此类推,得到目标车辆F2、目标车辆F3等。
在本实施例中,车轮特征包括轮胎特征、轮眉特征、轮毂特征;轮胎特征为大圆弧、轮眉特征为半圆弧、轮毂特征为圆形。在图像识别时,将将识别到的大圆弧、半圆弧、圆形依次标记为轮胎特征、轮眉特征、轮毂特征,根据距离关系和轮廓关系(例如同圆心关系的轮胎特征、轮眉特征、轮毂特征为一个车轮的车轮特征)进行规整,得到一一对应的一个或多个车轮特征。
本方案通过后视摄像头Q实时地采集当前的道路图像,对目标车辆Fi进行识别、监测;有针对性地从道路图像中提取出车轮特征以及车辆前脸特征,可有效降低目标车辆Fi的识别难度。
S4、获取目标车辆Fi的跟踪状态,并根据预设条件确定变道盲区的安全状态。
其中:获取目标车辆Fi的跟踪状态具体为:
从后视摄像头Q中获取当前路面图像并进行图像识别,依次判断目标车辆Fi的车辆前脸特征以及车轮特征是否存在;
若车辆前脸特征存在,则判断目标车辆Fi未进入变道盲区,若否则循环检测车辆前脸特征是否存在;
若车辆前脸特征消失、车轮特征存在,则判断目标车辆Fi进入变道盲区;
若车辆前脸特征、车轮特征均消失,则返回步骤S3。
其中:根据预设条件确定变道盲区的安全状态具体为:
当判断到左变道盲区L存在目标车辆Fi时,将变道盲区的安全状态标记为QL;当判断到右变道盲区R存在目标车辆Fi时,将变道盲区的安全状态标记为QR;
当判断到左变道盲区L/右变道盲区R不存在目标车辆Fi时,将变道盲区的安全状态,标记为NQL/NQR。
本实施例根据车辆的前进时,在后视摄像头Q采集到的道路图像中的变化趋势,设计了对应于目标车辆Fi当前跟踪状态的判断条件,首先是确定车辆前脸特征的存在与否,若存在则代表目标车辆Fi还未进入变道盲区,若辆前脸特征消失、车轮特征存在则表示目标车辆Fi进入变道盲区,通过简单的特征识别和条件判断即可确定出当前车辆F0后方来车(目标车辆Fi)的跟踪状态,算法简单、准确率高。
S5、当检测到车辆转向意图时,获取变道盲区的安全状态,并根据安全状态进行相应的转向提示。
其中,转向提示包括但不限于语音提醒和显示屏图像显示。
参见图3,当前车辆F0打左转向灯,车载ECU将获取左变道盲区L的状态,根据步骤S1~S4,控制后视摄像头Q实时地跟踪后方来车,进行数据处理后,获取变道盲区当前的安全状态。此时,若左变道盲区L的安全状态为NQL,则表示左变道盲区L无车辆目标,可进行变道;如果其安全状态为QL,系统进行预警,警告驾驶员,变道危险。车载ECU持续追踪变道盲区内的目标车辆Fi,直到变道区域安全状态为NQL/NQR,并完成变道工作。
本实施例通过后视摄像头Q实时地跟踪后方来车(目标车辆Fi)的行进状态,根据是否变道盲区划定安装状态并进行标记,从而在车辆转向时,可快速向车载控制中心反馈两侧道路安全,随后发出转向提示以提醒驾驶员变道,从而进一步提高车辆驾驶的安全性。
本发明实施例以后视摄像头Q为监测核心建立XOY平面坐标系,利用后视摄像头Q采集后方来车的路面图像,根据像素图像坐标系与XOY平面坐标系的对应关系,进行图像转换,并标定出预设左识别区域A、预设右识别区域B和变道盲区;当目标车辆Fi进入变道盲区时,其车身前半部分超过车辆尾部后,此时采用车轮特征识别,车辆特征明显且容易训练,可进一步提高目标车辆Fi的识别准确率;根据预设条件与目标车辆Fi当前的跟踪状态,直接确定变道盲区的安全状态,通过提升车辆盲区监测目标车辆Fi的跟踪能力,提高车辆的安全性能。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 一种基于后视摄像头的盲区监测方法
- 一种基于车载后视广角相机的盲区预警系统及方法