一种具有过滤篮自清洁功能的泳池清洁机器人
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及泳池清洁设备技术领域,具体涉及一种具有过滤篮自清洁功能的泳池清洁机器人。
背景技术
游泳池是人们从事游泳运动的场地,在使用过程中难免出现垃圾或浮游生物,因而要及时对池水进行清洁以免影响使用或影响人们的身体健康。为节省人工,现常用泳池清洁机器人进行泳池清洁工作,泳池清洁机器人搭载有过滤篮和水泵,池水经过过滤篮后被水泵抽出,垃圾则留在过滤篮内;泳池清洁机器人普遍存在一个问题,过滤篮容易被垃圾堵塞,使得池水难以通过滤网,从而使机器人清洁效能大打折扣,甚至失效。
发明内容
为解决上述问题,本发明提供了一种具有过滤篮自清洁功能的泳池清洁机器人,能够自动清洁过滤篮,大幅延长了泳池机器人的水下工作时间。
本发明技术方案如下:一种具有过滤篮自清洁功能的泳池清洁机器人,包括:机器人主体,在所述机器人主体内设有第一容腔和第二容腔,在所述机器人主体上开设有连通所述第一容腔的第一开口和连通所述第二容腔的第二开口,所述第一容腔和所述第二容腔通过第一单向阀连通,所述第一单向阀只能向所述第二容腔内打开;垃圾仓,设置在所述第一容腔内,所述垃圾仓包括过滤篮和位于所述过滤篮上方的垃圾收集区;所述第一开口通过连通所述过滤篮从而连通所述第一容腔,所述第一开口与所述过滤篮通过第二单向阀连通,所述第二单向阀只能向所述过滤篮打开;所述垃圾收集区密封于所述第一容腔且与所述过滤篮通过第三单向阀连通,所述第三单向阀只能向所述垃圾收集区打开;所述过滤篮以竖直方向为轴心转动连接于所述机器人主体;水泵,包括电机和由所述电机驱动的叶轮,所述叶轮位于所述第二容腔和所述第二开口之间,所述电机具有第一转动方向和第二转动方向,当所述电机以第一转动方向转动时,所述叶轮带动所述第二容腔内的水流向所述第二开口,当所述电机以第二转动方向转动时,所述叶轮带动所述第二开口处的水流向所述第二容腔;及喷水装置,包括喷嘴和水管,所述喷嘴设置在所述第一容腔内且位于所述过滤篮的外部,所述水管一端连通所述喷嘴而另一端连通所述第二容腔;从所述喷嘴喷出的水流能够冲击所述过滤篮并驱动所述过滤篮转动;
作为本发明进一步的方案,所述过滤篮为圆柱形滤网,所述过滤篮绕自身轴心旋转。
作为本发明进一步的方案,所述喷水装置设置有两个,两所述喷水装置相对所述过滤篮对角设置。
作为本发明进一步的方案,所述喷嘴包括呈条状的且以竖直方向设置的喷嘴主体以及沿所述喷嘴主体的高度方向间隔分布的多个喷水口。
作为本发明进一步的方案,所有所述喷水口截面的总面积小于所述第二开口的截面面积。
作为本发明进一步的方案,在所述第二开口处设置有滤网。
作为本发明进一步的方案,所述电机以所述第二转动方向转动第一预定时间后,将以所述第一转动方向转动。
作为本发明进一步的方案,所述电机以所述第一转动方向转动第二预定时间后,将以所述第二转动方向转动。
作为本发明进一步的方案,所述第一预定时间为10至30秒内的任一值。
作为本发明进一步的方案,所述第二预定时间为8分钟至15分钟内的任一值。
本发明技术方案,具有如下优点:电机具有第一转动方向和第二转动方向,当所述电机以第一转动方向转动时,泳池清洁机器人实现对池水的清洁,当所述电机以第二转动方向转动时,池水倒灌后通过喷水装置冲击所述过滤篮,从而使垃圾脱离所述过滤篮的滤网,此时第三单向阀打开,水流携带垃圾进入垃圾收集区,所述电机再次以第一转动方向转动,第三单向阀关闭,垃圾留在垃圾收集区,从而实现过滤篮的清洁;通过将所述过滤篮转动连接于所述机器人主体,使水流冲击所述过滤篮时过滤篮能够转动,从而使过滤篮表面尽可能都得到水流的冲击,从而实现过滤篮的全面清洁;本发明技术方案不需要增设额外的动力,通过自带的水泵就可以实现对过滤篮的清洁;本发明通过自动清洁过滤篮,大幅延长了泳池清洁机器人水下工作的时间,提高了清洁效率。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
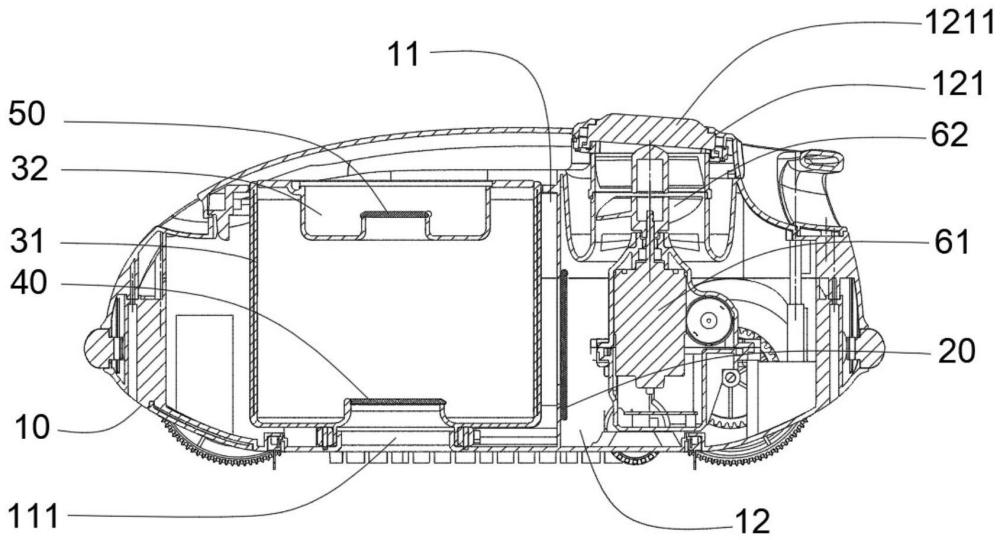
图1为本发明的正剖面示意图;
图2为本发明去除部分机器人主体后的俯视图,示出了第一容腔及第二容腔的内部结构;
图3为本发明中垃圾仓及喷水装置的一种结构示意图;
图4为本发明的外部轴示图。
附图标记说明:
10、机器人主体;11、第一容腔;12、第二容腔;111、第一开口;121、第二开口;1211、滤网;20、第一单向阀;30、垃圾仓;31、过滤篮;32、垃圾收集区;40、第二单向阀;50、第三单向阀;61、电机;62、叶轮;71、喷嘴;711、喷嘴主体;712、喷水口;72、水管。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
参照附图1至附图4,一种具有过滤篮自清洁功能的泳池清洁机器人,包括:机器人主体10,在所述机器人主体10内设有第一容腔11和第二容腔12,在所述机器人主体10上开设有连通所述第一容腔11的第一开口111和连通所述第二容腔12的第二开口121,所述第一容腔11和所述第二容腔12通过第一单向阀20连通,所述第一单向阀20只能向所述第二容腔12内打开;垃圾仓30,设置在所述第一容腔11内,所述垃圾仓30包括过滤篮31和位于所述过滤篮31上方的垃圾收集区32;所述第一开口111通过连通所述过滤篮31从而连通所述第一容腔11,所述第一开口111与所述过滤篮31通过第二单向阀40连通,所述第二单向阀40只能向所述过滤篮31打开;所述垃圾收集区32密封于所述第一容腔11且与所述过滤篮31通过第三单向阀50连通,所述第三单向阀50只能向所述垃圾收集区32打开;所述过滤篮31以竖直方向为轴心转动连接于所述机器人主体10;水泵,包括电机61和由所述电机61驱动的叶轮62,所述叶轮62位于所述第二容腔12和所述第二开口121之间,所述电机61具有第一转动方向和第二转动方向,当所述电机61以第一转动方向转动时,所述叶轮62带动所述第二容腔12内的水流向所述第二开口121,当所述电机61以第二转动方向转动时,所述叶轮62带动所述第二开口121处的水流向所述第二容腔12;喷水装置,包括喷嘴71和水管72,所述喷嘴71设置在所述第一容腔11内且位于所述过滤篮31的外部,所述水管72一端连通所述喷嘴71而另一端连通所述第二容腔12;从所述喷嘴71喷出的水流能够冲击所述过滤篮31并驱动所述过滤篮31转动;及控制器,通信连接所述电机61,用于控制所述电机61以所述第一转动方向或所述第二转动方向转动。
上述技术方案的泳池清洁机器人放入池水中后,当所述控制器控制所述电机61以所述第一转动方向旋转时,所述第一单向阀20和所述第二单向阀40打开,所述第三单向阀50关闭,所述第二容腔12不断产生负压,于是池水不断从第一容腔11进入第二容腔12,此时池水具体的流向为:池水经过第一开口111和所述第二单向阀40后进入所述过滤篮31,经过过滤后,垃圾留在过滤篮31内,池水则继续通过所述第一单向阀20进入所述第二容腔12,然后在叶轮62的带动下从所述第二开口121回到泳池。这是泳池清洁机器人的吸污清洁模式,实现了对池水的清洁,也使得垃圾逐渐堆积在过滤篮31上。
当控制器控制所述电机61以所述第二转动方向旋转时,所述第一单向阀20和所述第二单向阀40关闭,所述第三单向阀50打开,所述第二容腔12不断升压,于是池水从所述水管72流向所述喷嘴71并从所述喷嘴71喷出,从所述喷嘴71喷出的水流从所述过滤篮31的外部冲击所述过滤篮31,于是垃圾受到水流冲击而脱离所述过滤篮31,此时所述过滤篮31内的水压升高,池水裹挟脱落的垃圾流向所述垃圾收集区32,在一段时间后,所述控制器再次使所述电机61以所述第一转动方向旋转,所述第三单向阀50关闭,从而将垃圾留在所述垃圾收集区32;从所述喷嘴71喷出的水流在冲击所述过滤篮31的同时还能使所述过滤篮31转动,于是所述过滤篮31能较全面地被冲洗,于是实现了对过滤篮31的清洁,这是泳池清洁机器人的过滤篮自清洁模式。
由上可知,本发明通过控制器对水泵中电机61的转向控制即可实现对池水的清洁和对过滤篮的清洁,无需增设额外动力,简单易行;本发明的泳池清洁机器人通过自动清洁过滤篮31,大幅延长了水下工作的时间,减少了被提出池外进行清洁的次数,从而提高了其清洁效率。
所述第一单向阀20、所述第二单向阀40和所述第三单向阀50可以是因水压的变化从而自动打开或关闭的,应注意的是,所述第三单向阀50的打开水压大于所述第一单向阀20、所述第二单向阀40的打开水压;所述第一单向阀20、所述第二单向阀40和所述第三单向阀50也可以分别与所述控制器通信连接从而由所述控制器控制打开或关闭。
所述垃圾收集区32与所述过滤篮31可以是固定连接的,则所述垃圾收集区32可相对所述机器人主体10转动;所述垃圾收集区32与所述过滤篮31也可以是转动连接的,则所述垃圾收集区32固定连接所述机器人主体10。
在一些实施方式中,优选所述过滤篮31为圆柱形滤网,所述过滤篮31绕自身的轴心旋转;圆柱形滤网在各方向所受的喷射力都比较均匀,从而能够实现较全面的清洗。
在一些实施方式中,尤其当所述过滤篮31为圆柱形滤网时,所述喷水装置设置有两个,两所述喷水装置相对所述过滤篮31对角设置。
参考附图3,所述喷水装置中所述喷嘴71的一种实施方式,所述喷嘴71包括呈条状的且以竖直方向设置的喷嘴主体711以及沿所述喷嘴主体711的高度方向间隔分布的多个喷水口712;进一步的,为了使从所述喷水口712喷出的水流的冲击力更强,以使所述过滤篮31达到更好的清洁效果,所有所述喷水口712的总截面面积应该小于所述第二开口121的截面面积。
另外,在一些实施方式中,参考附图4,在所述第二开口121处设置有滤网1211,所述滤网1211用于防止垃圾进入所述第二容腔12,避免所述水管72被堵塞。
所述控制器对所述电机61的一种控制方式,所述控制器控制所述电机61以所述第二转动方向转动,在持续第一预定时间后,控制所述电机61以所述第一转动方向转动,在持续第二预定时间后,控制所述电机61再以所述第二转动方向转动,如此循环,实现对电机61转向的控制,从而可在每间隔第二预定时间后,实现对所述过滤篮31的一次自动清洁,清洁时间为第一预定时间;可选地,所述第一预定时间为10至30秒内的任一值,如10s、13s、18s、21s、25.5s、27s、30s等;所述第二预定时间可选为8分钟到15分钟内的任一值,如10min、11.5min、13min、15min等。
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
- 一种具有AI交互功能的清洁型机器人
- 一种具有自动清洁功能的KTV盒子及自动清洁方法
- 一种应用于清洁机器人的轮胎和清洁机器人
- 一种具有运动状态检测功能的泳池清洁机器人
- 一种具有换向调整功能的泳池清洁机器人