一种平面结构三自由度微纳定位平台及使用方法
文献发布时间:2023-06-19 10:35:20
技术领域
本发明涉及微纳定位平台领域,尤其是一种平面结构三自由度微纳定位平台及使用方法。
背景技术
本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
随着纳米技术和微机电系统的不断发展,精密定位技术逐渐成为目前一个活跃的研究热点。超高精度的柔性微纳定位平台作为精密定位技术的关键装置,与基于刚性连杆、齿轮、铰链的传统机构相比具有无摩擦、无磨损、无间隙、无需润滑、制造简便等优点,并且已经在扫描探针显微镜、生物细胞操作、微纳制造、光纤校准等领域广泛应用。特别是由于三自由度微纳定位平台多轴定位的优势,使得其拥有更广的前景。
然而现有的三自由度微纳定位平台存在许多不足。发明人发现,由于现有的三自由度微纳定位平台多采用垂直设计Z向定位平台的形式,导致整个定位平台过于冗长,结构不够紧凑,占用较大的安装空间。此外,定位平台还存在着Z向行程较小、Z向运动与XY向运动易发生耦合等不足。
发明内容
针对现有技术存在的不足,本发明的目的是提供一种平面结构三自由度微纳定位平台,具有结构紧凑,占用空间小,能够实现Z向较大行程,多个自由度运动相互配合,互不干涉。
为了实现上述目的,本发明是通过如下的技术方案来实现:
一种平面结构三自由度微纳定位平台,包括:
底板;
XY向上层定位机构,XY向上层定位机构包括安装于底板的基体,基体设置设于Y向的Y向放大机构和设于X向的X向放大机构,Y向放大机构和X向放大机构的输出末端侧向及二者的对立侧分别设有第一级导向机构,多组第一级导向机构设于腔室顶部边缘,腔室内支撑多组第二级导向机构,多组第二级导向机构交叉设置,第二级导向机构的其中一端与Y向放大机构或X向放大机构连接,且多组第二级导向机构的交叉处连接上层末端位移输出平台;
Z向下层定位机构,安装于底板,且Z向下层定位机构嵌套安装在XY向上层定位机构内,Z向下层定位机构的下层末端输出平台位于上层末端位移输出平台的正下方。
上述的维纳定位平台,采用XY向上层定位机构和Z向下层定位机构串联的结构,Z向定位平台则采用嵌套安装的形式,大幅降低了整体结构的高度,增加了平台的紧凑性,各个自由度运动相互配合、互不干涉,使平台能够实现大行程、高精度的XYZ三自由度纳米定位。
如上所述的一种平面结构三自由度微纳定位平台,所述Y向放大机构和X向放大机构均为桥式放大机构,各桥式放大机构的连接处均采用直角柔性铰链;
所述Y向放大机构和X向放大机构的内部均设置第一压电陶瓷驱动器,通过桥式放大机构对输出位移进行放大,实现大行程的X、Y向运动。
如上所述的一种平面结构三自由度微纳定位平台,所述第一级导向机构和第二级导向机构均采用柔性梁构成。
如上所述的一种平面结构三自由度微纳定位平台,所述第二级导向机构设有两组,两组第二级导向机构呈十字形对称布置,第二级导向机构用于将X向和Y向的运动传递至上层末端位移输出平台,第一级导向机构设于腔室的周侧顶部边缘,同时再通过第二级导向机构,实现了多方向的运动解耦,使得平台具有极高的解耦特性,提高了定位的精确性。
如上所述的一种平面结构三自由度微纳定位平台,所述Y向放大机构和X向放大机构的输出末端侧向的所述第一级导向机构均为两条相互平行的柔性梁;
Y向放大机构和X向放大机构的输出末端对立侧的第一级导向机构均为单条柔性梁。
如上所述的一种平面结构三自由度微纳定位平台,每一组所述第二级导向机构均包括四条相互平行的单柔性梁,可有效增大第二级导向机构的设置刚度。
如上所述的一种平面结构三自由度微纳定位平台,所述Y向放大机构和X向放大机构的输出末端向下延伸至所述腔室内,且二者的延伸段中部分别与所述第二级导向机构的端部连接;通过Y向放大机构和X向放大机构的输出末端与第二级导向机构的连接,实现了对X、Y向运动的解耦,提高定位的精确性。
如上所述的一种平面结构三自由度微纳定位平台,所述Z向下层定位机构包括平台基座,平台基座一侧设置第二压电陶瓷驱动器,第二压电陶瓷驱动器与设于其两侧的Scott–Russel放大机构连接,Scott–Russel放大机构的一侧与平台基座连接,另一侧连接杠杆放大机构,两侧的杠杆放大机构连接到半桥式放大机构,半桥式放大机构中部设置所述的下层末端位移输出平台;通过多组放大机构以实现对于Z向输出位移的多级放大,达到大行程Z向定位的目的。
如上所述的一种平面结构三自由度微纳定位平台,所述平台基座用于同所述底板连接;杠杆放大机构内侧与Scott–Russel放大机构连接,二者连接位置在杠杆放大机构长度位置的1/3处,且连接位置与平台基座的距离小于连接位置与下层平台位移输出末端之间的距离。
第二方面,本发明还提供了一种平面结构三自由度微纳定位平台的使用方法,包括如下内容:
XY向上层定位机构输入端输入位移,经Y向放大机构和X向放大机构放大,上层末端位移输出平台产生X、Y向位移;
Z向下层定位机构输入端输入位移,使得下层末端位移输出平台产生Z向位移,进而推动上层末端位移输出平台,配合XY向上层定位机构实现三自由度的定位。
上述本发明的有益效果如下:
1)本发明通过一种平面结构三自由度微纳定位平台的提供,采用XY向上层定位机构和Z向下层定位机构串联的结构,Z向定位平台则采用嵌套安装的形式,大幅降低了整体结构的高度,增加了平台的紧凑性,各个自由度运动相互配合、互不干涉,使平台能够实现大行程、高精度的XYZ三自由度纳米定位。
2)本发明Z向下层定位机构采用平面结构设计,水平方式安装,空间尺寸与传统的Z向平台相比大幅减小,结构更加紧凑,降低了三自由度定位平台安装时对于空间的要求。
3)本发明通过Z向下层定位机构采用三级放大机构,实现了对输出位移的多级放大,增加了Z向行程,解决了传统Z向平台输出位移较小的不足。
4)本发明通过两级导向机构的设置,第二级导向机构实现位移的传递,其通过设置第一级导向机构和第二级导向机构,实现了X、Y、Z三个自由度的运动解耦,保证了定位的精确性。
5)本发明整体结构简单,易于加工,成本较低。
附图说明
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
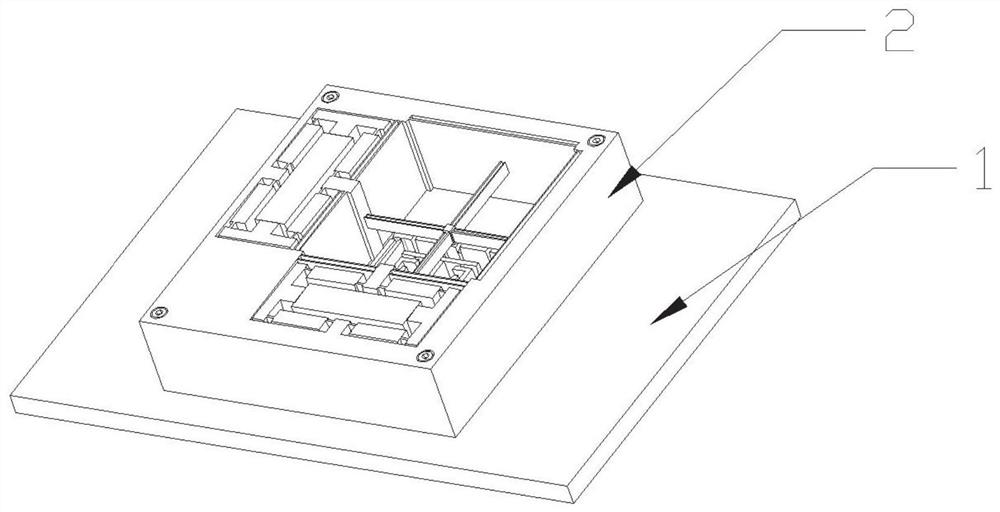
图1为本发明一种平面结构三自由度微纳定位平台示意图。
图2为本发明一种平面结构三自由度微纳定位平台俯视图。
图3为本发明XY向上层定位机构俯视图。
图4为本发明Z向下层定位机构示意图。
图5为本发明Z向下层定位机构俯视图。
图6为本发明Z向下层定位机构主视图。
其中,1-底板,2-XY向上层定位机构,201-Y向桥式放大机构,202-第一压电陶瓷驱动器,203-第一级导向机构,204-第二级导向机构,205-上层末端位移输出平台,206-X向桥式放大机构,207-第一螺栓孔,3-Z向下层定位机构,301-平台基座,302-Scott–Russel放大机构,303-杠杆放大机构,304-半桥式放大机构,305-第二压电陶瓷驱动器,306-下层末端位移输出平台,307-第二螺栓孔,308-预紧螺栓。
具体实施方式
应该指出,以下详细说明都是例示性的,旨在对本发明提供进一步的说明。除非另有指明,本发明使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非本发明另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合;
为了方便叙述,本发明中如果出现“上”、“下”、“左”、“右”字样,仅表示与附图本身的上、下、左、右方向一致,并不对结构起限定作用,仅仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
术语解释部分:本发明中的术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或为一体;可以是机械连接,也可以是电连接,可以是直接连接,也可以是通过中间媒介间接相连,可以是两个元件内部连接,或者两个元件的相互作用关系,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明的具体含义。
正如背景技术所介绍的,现有技术中存在整个定位平台结构不够紧凑、占用空间大的问题,为了解决如上的技术问题,本发明提出了一种平面结构三自由度微纳定位平台。
本发明的一种典型的实施方式中,如图1-图6所示,提供了一种平面结构三自由度微纳定位平台,包括底板1、XY向上层定位机构2、Z向下层定位机构3。
如图1所示,本实施例中的底板1为一矩形板,底板1上开有螺栓孔,XY向上层定位机构2和Z向下层定位机构3均通过螺栓固定在底板1上,底板的尺寸大于XY向上层定位机构的尺寸,XY向上层定位机构具有设定的高度,XY向上层定位机构包括基体,基体设置腔室,腔室具有设定的高度,腔室的横截面可为矩形如方形;整体结构紧凑,垂直方向上尺寸较小。
进一步地,如图2所示,Z向下层定位机构3嵌套安装在XY向上层定位机构2内,具体安装于腔室内,以上层末端位移输出平台205为基准,左右对称安装。
如图3所示,XY向上层定位机构2基体的四角开有四个第一螺栓孔207,通过螺栓与底板固定。
进一步地,XY向上层定位机构2中设有Y向放大机构和X向放大机构,两放大机构位于两个方向,且二者设置方向相互垂直,具体为Y向桥式放大机构201和X向桥式放大机构206,Y向桥式放大机构201和X向桥式放大机构206设于基体,并设于腔室的一侧;各桥式放大机构连接处均采用直角柔性铰链,各桥式放大机构通过对第一压电陶瓷驱动器202进行上电驱动,经桥式放大机构放大,输出端可以产生大行程的X、Y向位移。
进一步地,在两桥式放大机构输出末端侧向和Y向桥式放大机构201和X向桥式放大机构206的对立侧分别设有第一级导向机构203;本实施例中,第一级导向机构采用柔性梁构成。
其中,Y向桥式放大机构201和X向桥式放大机构206输出末端侧向的第一级导向机构分别靠近Y向桥式放大机构201和X向桥式放大机构206设置,且这两第一级导向机构均采用两相互平行的柔性梁,XY向上层定位机构的其他两侧均采用单柔性梁的导向机构,XY向上层定位机构腔室四周的第一级导向机构203呈正方形分布,且四周的第一级导向机构位于腔室顶部边缘,通过这样的设置可保证第一级导向机构的高纵向刚度。
进一步地,腔室内设有两组第二级导向机构204,两组第二级导向机构交叉布置,具体可呈十字形对称布置,每一组第二级导向机构均包括四条相互平行的单柔性梁,两组第二级导向机构204的中心位置连接上层末端位移输出平台205,上层末端位移输出平台呈方形,通过两级导向机构实现桥式放大机构的位移输出。
而且,Y向放大机构和X向放大机构的输出末端向下延伸至腔室内,且二者的延伸段中部分别与一组第二级导向机构的端部连接,两组第二级导向机构的另一端分别连接至腔室内侧壁,使得第二级导向机构呈十字型。采用对称式的导向结构设计,使得定位平台在X和Y向上的运动相同,在腔室内部设计第二级导向机构204增大了其刚度,对称布置的两级导向机构也减小了上层末端位移输出平台205在非驱动方向上的交叉轴耦合;通过两级导向机构的使得定位平台具有极高的解耦特性,并且提高了定位平台的精确性。
进一步地,Z向下层定位机构嵌套安装在XY向上层定位机构内,使得Z向下层定位机构的输出端位于XY向上层定位机构末端位移输出平台的正下方。
如图4所示,在本实施例中,Z向下层定位机构包括平台基座301,平台基座一侧设置第二压电陶瓷驱动器,第二压电陶瓷驱动器与设于其两侧的Scott–Russel放大机构连接,Scott–Russel放大机构的一侧与平台基座连接,另一侧连接杠杆放大机构,这样在平台基座的两侧均设置杠杆放大机构,两侧的杠杆放大机构连接到半桥式放大机构304,半桥式放大机构304中部设置下层末端位移输出平台;
由此通过多组放大机构以实现对于Z向输出位移的多级放大,达到大行程Z向定位的目的;第二压电陶瓷驱动器水平安装在Z向下层定位机构中,通过半桥式放大机构和下层平台位移输出末端将第二压电陶瓷驱动器产生的水平的位移转化为垂直位移,进而推动XY向上层定位机构的末端位移输出平台实现Z向位移输出。
其中,杠杆放大机构内侧与Scott–Russel放大机构连接,二者连接位置在杠杆放大机构长度位置的1/3处,且连接位置靠近平台基座侧设置,连接位置与平台基座的距离小于连接位置与下层平台位移输出末端之间的距离。
具体地,每一侧的杠杆放大机构均包括两条柔性梁,内侧的柔性梁与Scott–Russel放大机构连接。
如图4所示,Z向下层定位机构3由第二压电陶瓷驱动器305进行驱动,通过Scott–Russel放大机构302、杠杆放大机构303以及桥式放大机构304三级放大机构对输入位移进行放大,并通过半桥式放大机构将水平的Y向输入位移转化为垂直的Z向输出位移。
进一步地,如图5所示,Z向下层定位机构3的平台基座301设置两个第二螺栓孔307,通过螺栓将平台基座301水平安装于底板1。下层末端位移输出平台306安装于上层末端位移输出平台205的正下方,当对第二压电陶瓷驱动器305上电后,下层末端位移输出平台306产生垂直的Z向位移,进而推动上层末端位移输出平台205,最终配合XY向上层定位机构2实现三自由度的定位。由于两末端位移输出平台的尺寸比产生的位移大得多,因此定位过程XY向上层定位机构2与Z向下层定位机构3产生相对运动而造成的偏心可忽略不计,不影响整体定位平台的定位精确性。
进一步地,如图6所示,在平台基座301的中央位置开有用于安装预紧螺栓308的螺纹孔,通过拧预紧螺栓308对第二压电陶瓷驱动器305施加预紧力,从而提高定位精度。
本发明公开的一种平面结构三自由度微纳定位平台,相比传统的三自由度定位平台,具有结构紧凑、输出行程大等优点,可以应用在更多领域。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种平面结构三自由度微纳定位平台及使用方法
- 一种三自由度微纳定位平台