一种二级反扭距弯螺杆定向工具
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及石油与天然气钻井工程领域,尤其涉及一种二级反扭距弯螺杆定向工具。
背景技术
水平井技术是开发深层和非常规油气资源的主体技术,水平井钻井需要进行井眼轨迹导向控制,目前水平井导向钻井包含旋转导向和弯螺杆滑动导向两种。
1)现有旋转导向技术费用高昂:日费15-20万元,按平均单井导向周期45天计算,仅旋转导向服务费达675-900万元,约占整个钻井费用的10-20%。
2)卡埋风险大:旋转导向工具外径尺寸较大,目前生产井井眼直径多数为215.9mm,旋转导向最大直径达210mm,间隙不到6mm,极易发生岩屑卡死埋钻。
基于以上因素,我国水平井导向依然以弯螺杆滑动导向为主,例如在2020年,川渝页岩气弯螺杆滑动导向占比超过50%,长庆致密油气占比甚至高达93%。在弯螺杆滑动导向过程中,钻柱不旋转,钻柱摩阻大极易“托压”,导致钻压不能有效传递,机械钻速通常仅为旋转钻井的1/10~1/5;“托压”导致工具面不易调整和控制,钻井时效降低超过30%。
钻柱旋转是解决“托压”最有效手段之一,如基于钻柱往复旋转的钻柱扭摆系统,提速超过30%,但该系统无法应用于深井,3000m以上井深提速有限。加拿大Hy上roClutch公司研发了双螺杆离合器,该工具中一支螺杆为钻头提供破岩扭矩,另一支螺杆抵抗钻头破岩传递到钻杆的反扭矩,但工具压耗较常规钻具组合高5-10MPa,无法满足现场工况需求,且工具面无法精确控制,尚未见工程应用试验。国内川庆钻探、成都理工大学(本项目组)等开展了隔离钻柱旋转技术研究,实现了钻柱“离”与“合”的功能,然而依然存在工具面不可控和下部静止钻具过长的问题(超过700米),弯螺杆滑动导向依然存在井眼轨迹控制困难、钻速和纯钻时效低、卡钻风险高三大技术瓶颈。
专利CN201910386427.2、US9109402B1等发明了双螺杆定向结构,其中一个螺杆用于破岩,另一个螺杆用于抵抗反扭矩,此种方案双螺杆耗能,压耗大,地面泥浆泵性能受限,未见应用;且属于纯机械式定向,工具面控制难度极大。专利CN201710028105.1、US5458208、 CN 2651413Y、CN105525875A等发明了离合机构,但这些离合机构执行离合作业一次旋转角度较大,超过30°,工具面控制精度较低;由于机械性能的限制,离合时间较长,因此钻杆转速小,难以适应高转速需求。
因此,亟待发明一种工具面角可控且控制精度高、转速大、卡钻风险小、成本低的定向系统,有效解决钻柱“托压”、井眼轨迹控制困难等技术瓶颈,显著降低定向作业难度。
发明内容
为了克服现有技术的不足,发明了一种二级反扭距弯螺杆定向工具,由一级离合机构(100)和二级离合机构(200)组成,其中一级离合机构(100)和二级离合机构(200)均由1-固定螺钉A(1)、电池堵头(2)、盖板(3)、电路板(4)、电池(5)、电池仓(6)、压力传感器(7)、电磁阀(8)、本体(14)、堵头(15)、固定螺钉B(17)、活塞(18)外齿筒(20)、内齿筒(21)、传递筒(22)、轴承A(23)、限位筒(24)、轴承B(25)、下接头(26)、连接筒(27)、金刚石复合片(28);
所述:一级离合机构(100)的下接头(26)与二级离合机构(200)的电池仓(6)通过螺纹连接;
所述:电池仓(6)与本体(14)螺纹连接,本体(14)与内齿筒(21)上端螺纹连接,内齿筒(21)下端与限位筒(24)螺纹连接;
所述:堵头(15)与外齿筒(20)上端螺纹连接,外齿筒(20)下端的花键A(2002)与传递筒(22)上端的花键B(2201)进行花键连接,传递筒(22) 下端与连接筒(27)上端螺纹连接,连接筒(27)下端与下接头(26)螺纹连接;
所述:内齿筒(21)加工台阶A(2101),用于限制外齿筒(20)位置;
所述:外齿筒(20)加工台阶B(2003),用于与台阶A(2101)配合限位;
所述:所述连接筒(27)和限位筒(24)之间装配轴承A(23);
所述:本体连接筒(27)和本体(14)之间装配轴承B(25);
所述:活塞(18)装配在堵头(15)与内齿筒(21)形成的腔体中,活塞 (18)通过固定螺钉B(17)固定在本体(14)上;
所述:压力传感器(7)、压力传感器(8)通过螺纹连接在本体(14) 上。
所述:工具由2~4个一级离合机构(100)或二级离合机构(200)构成,满足不同控制精度和钻杆转速需求。
所述:电池仓(6)上加工4~8个电池安装孔,并安装4~8个电池(5),以满足不同电能需求。
所述:盖板(3)由信号通道(3001)和盖板本体(3002)组成,信号通道(3001)为陶瓷材料,烧结在盖板本体(3002)上,为无线电磁波传输提供信号通道。
所述:内齿筒(21)上加工1~3个径向通孔,用于平衡内齿筒(20) 和本体(14)形成的空腔的内部压力;限位筒(24)加工1~3个径向通孔(29),用于润滑轴承组(13)和平衡限位筒(24)和本体(14)形成的空腔的内部压力。
所述:活塞(18)内外侧均安装了防尘圈(1801)+密封圈(1802)+支撑环(1803)的组合密封系统,用于隔离活塞上液压腔(16)和活塞下液压腔(19)压力。
所述:本体(14)下端和下接头(26)上端烧结金刚石复合片(28),以减小本体(14)和下接头(26)之间的摩擦系数,增加本体(14)和下接头 (26)的耐磨性。
所述:限位筒(24)上端与外齿筒(20)接缝处焊接固定,起到限位筒(24)防掉作用,避免限位筒(24)松动导致传递筒(22)、下接头(26)掉落风险,进而避免其他钻具掉落。
所述:电磁阀(8)为二位四通电磁阀,或可实现相同功能的电磁阀组。
所述:内齿筒(21)轴向和周向均加工矩形齿A(2102),外齿筒(20) 轴向和周向均加工矩形齿B(2001),矩形齿A(2102)和矩形齿B(2001) 数量相同。
本发明与现有技术相比,具有的优点有:
(1)工具面角控制精度高,利用二级离合模块对不同角度的控制,可使一级离合模块的20~30°的工具面角控制精度减小到5°以内。
(2)钻杆转速高,本发明具有二级甚至更多的离合模块,工具总的离合频率较高,理论上多一级离合模块,转速高一倍。可提供钻杆的转速更大。
(3)卡钻风险小,如215.9mm井眼本发明最小外径可为165mm,而常规旋转导向工具外径210mm,相比常规旋转导向,本发明卡钻风险显著降低。
(4)成本低,本发明结构简单,不涉及高温高压电机、泵、压力补偿短节等零部件,成本更低。
附图说明
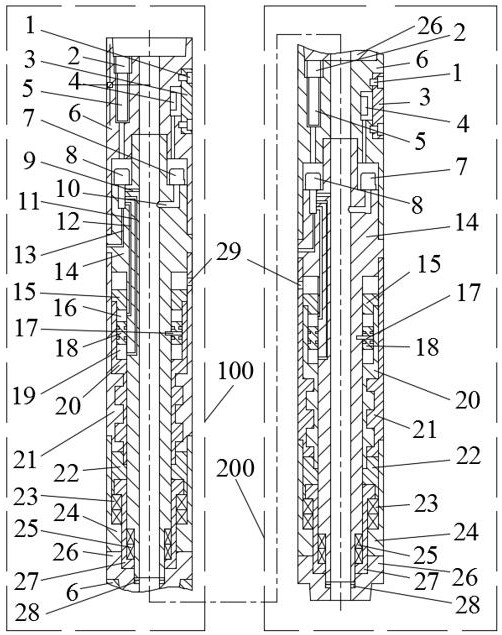
图1为二级反扭距弯螺杆定向工具装配图;
图2为内齿筒全剖图;
图3为外齿筒结构示意图;
图4为外齿筒全剖图;
图5为传递筒结构示意图;
图6为活塞全剖图;
图7为二级反扭距弯螺杆定向工具钻井原理图。
图中:1-固定螺钉A,2-电池堵头,3-盖板,3001-信号通道,3002- 盖板本体,4-电路板,5-电池,6-电池仓,7-压力传感器,8-电磁阀, 9-电磁阀P口液压通道,10-压力传感器液压通道,11-电磁阀A口液压通道,12-电磁阀B口液压通道,13-电磁阀T口液压通道,14-本体,15-堵头,16-活塞上液压腔,17-固定螺钉B,18-活塞,1801-防尘圈,1802-密封圈,1803-支撑环,19-活塞下液压腔,20-外齿筒, 2001-矩形齿B,2002-花键A,2003-台阶B,21-内齿筒,2101-台阶 A,2102-矩形齿A,22-传递筒,2201-花键B,23-轴承A,24-限位筒,25-轴承B,26-下接头,27-连接筒,28-金刚石复合片,29-径向通孔,30-钻杆,31-弯螺杆,32-钻头,100-一级离合机构,200-二级离合机构。
具体实施方式
为了对本发明的技术特征、目的效果有更加清楚的理解,现结合附图说明本发明的具体实施例。
由图1~图3所示,本实施例提供一种二级反扭距弯螺杆定向工具,由一级离合机构(100)和二级离合机构(200)组成,其中一级离合机构(100)和二级离合机构(200)均由1-固定螺钉A(1)、电池堵头(2)、盖板(3)、电路板(4)、电池(5)、电池仓(6)、压力传感器(7)、电磁阀(8)、本体(14)、堵头(15)、固定螺钉B(17)、活塞(18)外齿筒(20)、内齿筒(21)、传递筒(22)、轴承A(23)、限位筒(24)、轴承B(25)、下接头(26)、连接筒(27)、金刚石复合片(28);
所述:一级离合机构(100)的下接头(26)与二级离合机构(200)的电池仓(6)通过螺纹连接;
所述:电池仓(6)与本体(14)螺纹连接,本体(14)与内齿筒(21)上端螺纹连接,内齿筒(21)下端与限位筒(24)螺纹连接;
所述:堵头(15)与外齿筒(20)上端螺纹连接,外齿筒(20)下端的花键A(2002)与传递筒(22)上端的花键B(2201)进行花键连接,传递筒(22) 下端与连接筒(27)上端螺纹连接,连接筒(27)下端与下接头(26)螺纹连接;
所述:内齿筒(21)加工台阶A(2101),用于限制外齿筒(20)位置;
所述:外齿筒(20)加工台阶B(2003),用于与台阶A(2101)配合限位;
所述:所述连接筒(27)和限位筒(24)之间装配轴承A(23);
所述:本体连接筒(27)和本体(14)之间装配轴承B(25);
所述:活塞(18)装配在堵头(15)与内齿筒(21)形成的腔体中,活塞 (18)通过固定螺钉B(17)固定在本体(14)上;
所述:压力传感器(7)、压力传感器(8)通过螺纹连接在本体(14) 上。
具体地,将二级反扭距弯螺杆定向工具在地面组装、调试后下入到井底,若需要定向作业,则地面泥浆脉冲发射目标工具角A泥浆脉冲信号。二级离合机构(200)的压力传感器(7)接收到目标工具面角 A泥浆压力脉冲。二级离合机构(200)的电路板(4)实时测量当前工具面角B,根据前工具面角B变化规律计算出钻杆(30)转速,二级离合机构(200)的电路板(4)根据转速为一级离合机构(100)与二级离合机构 (200)分配离合频率N1和N2。二级离合机构(200)的电路板(4)为一级离合机构(100)发射离合频率N1无线电磁波信号,一级离合机构(100) 的电路板(4)接收离合频率N1信号。一级离合机构(100)中的电路板(4) 控制一级离合机构(100)中的电磁阀(8)按照N1通断电,进而控制一级离合机构(100)离合。同时,二级离合机构(200)的电路板(18)控制二级离合机构(200)的电磁阀(8)通断电频率。二级离合机构(200)的电路板 (4)通过比对目标工具面角A和实时测量当前工具面角B的误差,实时调整二级离合机构(200)的电磁阀(8)通断电频率,进而实现目标工具面角A满足钻井需求。
具体地,由于活塞(18)由固定螺钉B(17)固定在本体(14)上,当活塞上液压腔(16)高压和活塞下液压腔(19)低压时,外齿筒(20)下移,当活塞上液压腔(16)低压和活塞下液压腔(19)高压时,外齿筒(20)上移。定向时,电磁阀(8)控制二级反扭距弯螺杆定向工具内的高压泥浆和环空中的低压泥浆交替进入活塞上液压腔(16)和活塞下液压腔(19),在高低压力交替作用下,外齿筒(20)上下来回移动。同时,钻头(32) 破岩产生的逆时针方向的反扭矩通过弯螺杆传递到下接头(26),下接头(26)将逆时针方向的扭矩传递连接筒(27)上,连接筒(27)将逆时针方向的扭矩传递到传递筒(22)上,传递筒(22)将逆时针方向的扭矩传递到外齿筒(20)上,外齿筒(20)在逆时针方向的扭矩和上下移动的共同作用下,反复与内齿筒(21)啮合和离开,啮合和离开一次外齿筒(20) 逆时针旋转一定角度,进而抵消钻杆(30)顺时针旋转的角度,实现工具面角的动态控制。
具体地,若不需要定向钻井,则地面泥浆脉冲发射“停止定向”泥浆脉冲信号,二级离合机构(200)的压力传感器(7)接收到“停止定向”泥浆压力脉冲信号。二级离合机构(200)的电路板(4)为一级离合机构 (100)发射“停止定向”无线电磁波信号,一级离合机构(100)的电路板 (18)接收到“停止定向”无线电磁波信号。一级离合机构(100)的电路板(18)控制电磁阀(8)断电,停止定向。同时,二级离合机构(200)的电路板(4)控制二级离合机构(200)的电磁阀(8)断电,停止定向。
以上所述仅为本发明示意性的具体实施方式,并非用以限定本发明的范围。任何本领域的技术人员,在不脱离本发明的构思和原则的前提下所做出的等同变化和修改,均应属于本发明的保护范围。