一种用于景区清理垃圾的无人机吸取装置
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及旋翼无人机技术领域,尤其是指一种用于景区清理垃圾的无人机吸取装置。
背景技术
随着旅游业的快速发展,带来环境问题需要得到重视,游客们带来的垃圾对景区的环境造成了不小的影响。景区上的垃圾不仅会影响风景,而且会对景区环境造成危害,例如食品包装袋以及塑料瓶丢弃在路边甚至悬崖边,这类垃圾容易掉落到难以拾取的地方。在实际中,目前清理垃圾大多是依靠人工拾取方式来完成,这类方法不仅效率低而且危险。
一般采用搭载机械臂的无人机完成清理工作,但使用机械爪拾取垃圾存在较大的缺点。其一:机械爪在对垃圾进行抓取时,需要考虑机械爪抓取垃圾的角度是否合适,机械臂的活动范围会受到无人机起落架的限制,而且一般机械臂的长度会大于脚架,起降时必须通过特定的起落装置来实现无人机的起降;其二:机械爪自身的结构决定了机械爪无法抓取体积较小、厚度薄的垃圾以及一些卡在缝隙里的垃圾,同时机械爪无法调整自身爪子的大小,无法在狭窄的空间内对垃圾进行抓取;其三:机械爪拾取垃圾是通过加大两侧爪子的力度,加大爪子与垃圾之间的压力,从而通过增大摩擦力来实现抓取垃圾。这方法在抓取光滑垃圾时容易打滑,或抓取后容易掉落,导致垃圾脱落而造成二次污染。现有的技术问题成了相关领域技术人员急需解决的。
发明内容
本发明的目的在于提供一种用于景区清理垃圾的无人机吸取装置,吸取装置中的部分构件为空心结构,装置整体较为轻便;采用真空吸取方法根据目标物体的大小来调整吸取口径的面积,来实现吸取较大垃圾或一些处在缝隙中的垃圾,并从根本上防止了垃圾脱落造成的二次污染。
本发明一种用于景区清理垃圾的无人机吸取装置,包括无人机机体、图像采集模块以及吸气式主杆。图像采集模块包括摄像头和无线图传发射端;摄像头固定于无人机底部且不可移动;控制器安装于无人机机体内部。
所述的吸气式主杆包括水平转轴、连接柱、第一竖直转轴、可伸缩机械臂、第二竖直转轴以及可调吸气装置。水平转轴安装于无人机底部的中心位置。水平转轴的底部和第一竖直转轴的顶部用连接柱相连接。
所述的可伸缩机械臂包括从上至下依次设置的第一伸缩杆、第二伸缩杆和第三伸缩杆。可伸缩机械臂的第一伸缩杆和第二伸缩杆左右两侧内部均设有滑槽,第二伸缩杆和第三伸缩杆左右两侧外部均设有凸出轨道。第二伸缩杆的凸出轨道安装在第一伸缩杆的滑槽内,第三伸缩杆的凸出轨道安装在第二伸缩杆的滑槽内。
所述的第一竖直转轴与可伸缩机械臂的第一伸缩杆的顶部连接,第二竖直转轴和可伸缩机械臂的第三伸缩杆的底部连接。
所述的可调吸气装置包括真空吸气装置、电动伸缩杆、支撑杆、吸取气路和弹性尼龙布。真空吸气装置包括电机、风扇、排气口、进气口和过滤网。真空吸气装置的电机上下位置均设有风扇。电机下方的风扇进气口安装过滤网,下层过滤网在真空吸气装置工作时,防止吸入灰尘异物堵塞。电机上方的风扇出气口安装过滤网,上层过滤网在真空吸气装置未工作时,防止灰尘异物从真空吸气装置的排气口进入风扇中,避免风扇堵塞停转的发生。所述的真空吸气装置上端设有六个等距排列的圆形排气口,真空吸气装置工作时所需排出的气体由排气口排出。所述的真空吸气装置的电机使用导线与控制器连接,接收控制器发送的控制指令。
所述的电动伸缩杆为空心结构,电动伸缩杆顶部与真空吸气装置底部的进气口相连接。六根支撑杆的顶部设有固定环与电动伸缩杆的底部等距铰接。
所述的六根支撑杆上紧密覆盖弹性尼龙布,形成封闭的吸取口。
所述的吸取气路包括吸取口、电动伸缩杆以及真空吸气装置。吸取口顶部与空心的电动伸缩杆底部气口连接。真空吸气装置的进气口与空心的电动伸缩杆顶部气口连接。
进一步地,所述的水平转轴、第一竖直转轴和第二竖直转轴使用导线与控制器连接,接收控制器发送的控制指令,实现控制各自旋转角度。
进一步地,所述的可伸缩机械臂的第一伸缩杆、第二伸缩杆和第三伸缩杆都配有独立电机控制伸缩杆伸长的距离,各自的独立电机使用导线与控制器连接,由控制器发送控制指令给各自的电机实现控制伸缩杆伸长的距离。
进一步地,电动伸缩杆与支撑杆铰连接,支撑杆展开面积随电动伸缩杆伸长的距离改变,从而使吸取口更加契合要吸取的目标垃圾。
无人机吸取景区垃圾方法,包括以下步骤:
步骤一、无人机从地面起飞,在空中飞行。通过摄像头观察到要吸取的目标垃圾,将无人机飞行至目标垃圾的斜上方。
步骤二、缓慢下降无人机靠近目标垃圾至一定距离,通过摄像头捕捉到目标垃圾的图像,判断无人机与目标垃圾之间的位置关系,控制器发送控制指令给水平转轴和第一竖直转轴。水平转轴和第一竖直转轴接收到控制指令后旋转适当的角度,令吸取口对准目标垃圾。
步骤三、控制器发送控制指令给可伸缩机械臂伸长的第二伸缩杆和第三伸缩杆的电机,令第二伸缩杆和第三伸缩杆伸长适当的距离,吸取口靠近目标垃圾,保证无人机机体在安全的空间内完成对目标垃圾的吸取工作。
步骤四、再次通过摄像头观察目标垃圾的方位,控制器发送控制指令给第二竖直转轴,第二竖直转轴接收到指令后旋转相应的角度,令可调吸气装置底部的吸取口对准目标垃圾。
步骤五、控制器根据目标垃圾尺寸的不同,控制电动伸缩杆的伸长距离,来控制吸取口的面积,令吸取口更加契合目标垃圾的形状。
步骤六、目标垃圾与吸取口紧密接触后,真空吸气装置开始工作,通过空心电动伸缩杆和真空吸气装置的排气口将支撑杆与目标物体之间的空气排出,形成真空环境来吸取目标垃圾。
步骤七、收到吸紧目标垃圾的信号后,控制器先控制水平转轴、第一竖直转轴、第二竖直转轴都回归原位,再发送控制指令给可伸缩机械臂的第二伸缩杆和第三伸缩杆的电机,令第二伸缩杆和第三伸缩杆归位,完成吸取工作。
本发明具有的有益效果是:
(1)能够根据目标垃圾的大小来调整吸取口径的面积,实现更精确有效的吸取目标垃圾。通过吸取方法来实现捕获目标垃圾,可吸取的垃圾可为表面积较大的垃圾、厚度小的垃圾以及光滑的垃圾,也可以缩小吸取口径来吸取到一些处在缝隙中的垃圾,从根本上防止了垃圾脱落造成的二次污染,这是体积较大的机械爪无法实现的。
(2)在无人机上安装了一个水平转轴,两个竖直转轴和可伸缩机械臂,可伸缩机械臂能够有效的增加无人机的工作距离,通过控制器发送的控制指令控制可伸缩机械臂的第二伸缩杆和第三伸缩杆各自的电机,实现对第二伸缩杆和第三伸缩杆伸长距离的精确控制,从而使得机械臂在无人机下方有更大的操作空间,配合水平转轴和竖直转轴的旋转,能够实现大范围的吸取,增加了无人机吸取目标垃圾的灵活性;在较为陡峭的岩壁边缘工作时,也可保证无人机机体在安全空间内完成对目标垃圾的吸取工作,降低了吸取目标垃圾的工作难度。
(3)吸取装置中的连接杆、可伸缩机械臂中的伸缩杆以及真空吸气装置中的电动伸缩杆均为空心结构,减少了装置整体的重量;相较于传统的机械爪,本发明的无人机吸取装置具备轻便以及在无人机载荷相同情况下能吸取更重垃圾的优势。
附图说明
图1是无人机吸取装置整体结构图;
图2是无人机吸取装置中吸取装置的结构图;
图3是无人机吸取装置中可伸缩机械臂的截面图;
图4是无人机吸取装置中支撑杆的结构图;
图5是无人机吸取装置中可调吸气装置的截面图;
图6是无人机吸取装置吸取方法中步骤一的示意图;
图7是无人机吸取装置吸取方法中步骤二的示意图;
图8是无人机吸取装置吸取方法中步骤三的示意图;
图9是无人机吸取装置吸取方法中步骤四的示意图;
图10是无人机吸取装置吸取方法中步骤五情况一的示意图;
图11是无人机吸取装置吸取方法中步骤五情况二的示意图;
图12是无人机吸取装置吸取方法中步骤七的示意图;
图13是无人机吸取装置的流程图。
具体实施方式
下面结合附图对本发明的具体实施方式进行进一步说明。
如图1所示,本发明提供一种用于景区清理垃圾的无人机吸取装置,包括无人机机体、图像采集模块以及吸气式主杆。图像采集模块包括摄像头和无线图传发射端;摄像头固定于无人机底部且不可移动;控制器安装于无人机机体内部。
如图2所示,吸气式主杆包括水平转轴1、连接柱2、第一竖直转轴3、可伸缩机械臂4、第二竖直转轴5以及可调吸气装置6。无人机底部中心处与水平转轴1的顶部相连接。水平转轴1的底部和第一竖直转轴3的顶部与连接柱2相连接。第一竖直转轴3和第二竖直转轴5之间用可伸缩机械臂4连接。可调吸气装置6的顶部与第二竖直转轴5的底部连接。水平转轴1、第一竖直转轴3和第二竖直转轴5使用导线与控制器连接,接收控制器发送的控制指令,实现控制各自旋转角度。
如图3所示,可伸缩机械臂4包括第一伸缩杆4-1、第二伸缩杆4-2和第三伸缩杆4-3。第一伸缩杆4-1和第二伸缩杆4-2左右两侧内部均设有滑槽,第二伸缩杆4-2和第三伸缩杆4-3左右两侧外部均设有凸出轨道。第二伸缩杆4-2的凸出轨道安装在第一伸缩杆4-1的滑槽内,第三伸缩杆4-3的凸出轨道安装在第二伸缩杆4-2的滑槽内。第一竖直转轴3与可伸缩机械臂4的第一伸缩杆4-1的顶部连接,第二竖直转轴5和可伸缩机械臂4的第三伸缩杆4-3的底部连接。
可伸缩机械臂4的第一伸缩杆4-1、第二伸缩杆4-2和第三伸缩杆4-3都配有独立电机控制伸缩杆伸长的距离,各个独立电机使用导线与控制器连接,由控制器发送控制指令给各自的电机控制伸缩杆伸长的距离。
如图4所示,支撑杆9包括固定环9-1和空心支撑杆9-2。固定环9-1均设有固定环与电动伸缩杆8底部铰接。
如图5所示,可调吸气装置6包括真空吸气装置7、电动伸缩杆8、支撑杆9、吸取气路和弹性尼龙布。真空吸气装置7包括电机7-1、风扇7-2、排气口7-3、进气口7-4和过滤网7-5。真空吸气装置7的电机7-1上下设有风扇7-2,双风扇令形成的真空环境速度更快更稳定。电机7-1下方的风扇7-2进气口7-4安装过滤网7-5,下层过滤网7-5在真空吸气装置7工作时,防止吸入灰尘异物堵塞。电机7-1上方的风扇7-2出气口安装过滤网7-5,上层过滤网7-5在真空吸气装置7未工作时,防止灰尘异物从真空吸气装置的排气口进入风扇7-2中,避免风扇7-2堵塞停转的发生。真空吸气装置7的顶部设有6个等距排列的圆形排气口7-3,真空吸气装置7工作时所需排出的气体由排气口7-3排出。真空吸气装置7的电机7-1使用导线与控制器连接,接收控制器发送的控制指令。
电动伸缩杆8为空心结构,电动伸缩杆8的顶部与真空吸气装置7的底部的进气口7-4相连接。6根支撑杆9上紧密覆盖弹性尼龙布,形成封闭的吸取口。6根支撑杆9的顶部设有固定环9-1与电动伸缩杆8的底部等距铰接,支撑杆展开面积随电动伸缩杆伸长的距离改变,从而使吸取口更加契合要吸取的目标垃圾。
吸取气路包括吸取口、电动伸缩杆8以及真空吸气装置7。吸取口顶部与空心的电动伸缩杆8的底部气口连接。真空吸气装置7的进气口7-4与空心的电动伸缩杆8的顶部气口连接。
无人机吸取景区垃圾方法,包括以下步骤:
步骤一、如图6所示,吸气式主杆因本身的物理结构长于无人机脚架,当无人机在地面准备起飞或准备降落时,控制器发送控制指令给第一竖直转轴3,第一竖直转轴3接受到指令后,向无人机机尾顺时针旋转90°。第二竖直转轴5保持不变,令可伸缩机械臂4和可调吸气装置6呈一条直线且与连接柱2之间呈90°。该姿态可以保证无人机在地面上安稳的起飞和降落。通过摄像头观察到要吸取的目标垃圾,将无人机飞行至目标垃圾的斜上方。
步骤二、如图7所示,缓慢下降无人机靠近目标垃圾至一定距离,通过摄像头捕捉到目标垃圾的图像,判断无人机与目标垃圾之间的位置关系,控制器发送控制指令给水平转轴1和第一竖直转轴3。水平转轴1和第一竖直转轴3接收到控制指令后,水平转轴1顺时针旋转10°,第一竖直转轴3逆时针旋转120°。第二竖直转轴5保持不变,令可伸缩机械臂4和可调吸气装置6呈一条直线,此时且可伸缩机械臂4和可调吸气装置6与连接柱2之间的夹角为120°,令吸取口对准目标垃圾。
步骤三、如图8所示,控制器发送控制指令给可伸缩机械臂4伸长的第二伸缩杆4-2和第三伸缩杆4-3的电机,电机工作令第二伸缩杆4-2和第三伸缩杆4-3伸长适当的距离,吸取口靠近目标垃圾,保证无人机机体在安全的空间内完成对目标垃圾的吸取工作。
步骤四、如图9所示,再次通过摄像头观察目标垃圾的方位后,控制器发送控制指令给第二竖直转轴5,第二竖直转轴5接收到指令后逆时针旋转15°,令可调吸气装置底部的吸取口对准目标垃圾。
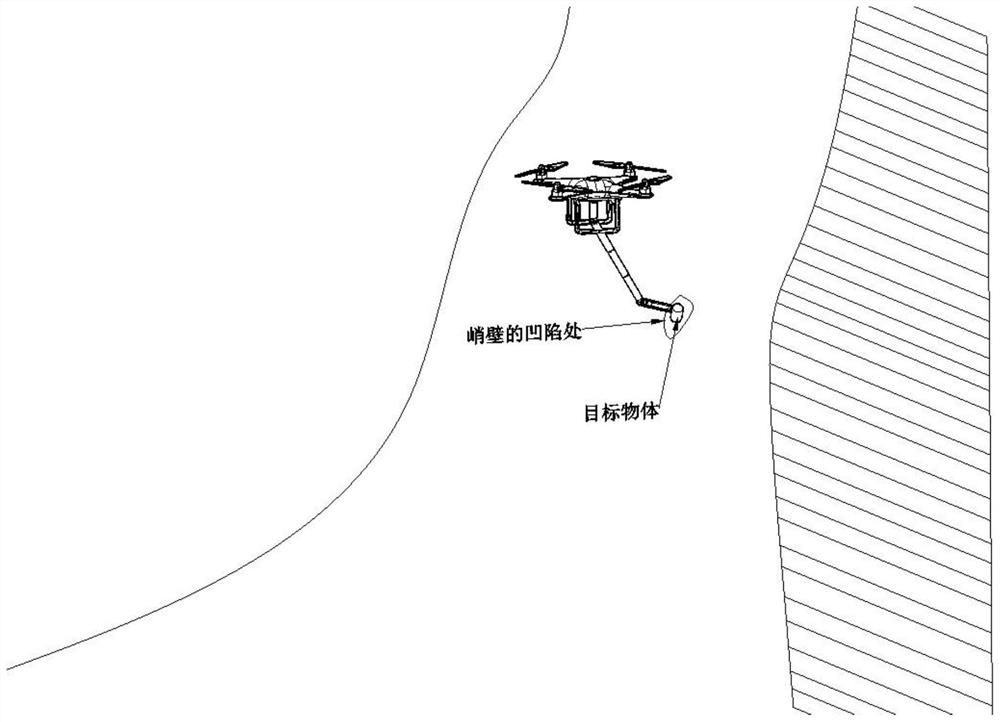
步骤五、控制器根据目标垃圾尺寸的不同,发送相应的控制指令,控制电动伸缩杆8的伸长距离,支撑杆9与电动伸缩杆8的底部铰接,支撑杆9展开面积随电动伸缩杆8伸长的距离改变而改变,来控制吸取口的面积,令吸取口更加契合目标垃圾的形状。如图10所示,当目标垃圾尺寸较大时,电动伸缩杆8伸长的距离增加,增大吸取口的面积。如图11所示,当目标物体处在陡峭的岩壁中时,通过第一竖直转轴3一定的旋转和可伸缩机械臂4伸长适当的距离,保证无人机机体跟岩壁保持安全距离完成对目标垃圾的吸取工作,同时电动伸缩杆8伸长的距离减小,缩小吸取口的面积,便于实现吸取工作。
步骤六、目标垃圾与吸取口紧密接触后,控制器发送控制指令给真空吸气装置7的电机7-1,电机7-1接收到控制器的控制指令后开始工作,带动风扇7-2开始工作,吸取口与目标垃圾之间的空气通过电动伸缩杆8进入真空吸气装置7的进气口7-4,通过2层过滤网滤7-5除灰尘异物再由排气口7-3排出,形成真空环境来吸取目标垃圾,吸紧目标垃圾后反馈给控制器吸紧信号。
步骤七、如图12所示,当目标垃圾尺寸较大时,控制器接受到吸紧信号后,控制器先发送控制指令给水平转轴1、第一竖直转轴3和第二竖直转轴5,水平转轴1、第一竖直转轴3和第二竖直转轴5接收到控制指令后旋转方向改变旋转相同的角度,令吸气式主杆呈竖直状态,控制器再发送控制指令给可伸缩机械臂4的第二伸缩杆4-2和第三伸缩杆4-3的电机,令第二伸缩杆4-2和第三伸缩杆4-3归位,完成吸取工作。
- 一种用于景区清理垃圾的无人机吸取装置
- 一种适用于湖面垃圾清理的小型无人机抓取装置