一种智能攀爬外骨骼系统
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及电力辅助设备,尤其涉及一种适用高空作业的智能攀爬外骨骼系统。
背景技术
随着经济高速发展和环保力度加强,架空工程设备的对地距离高度越来越高,施工、安装、运检等工作人员在架空设备上攀爬的工作强度也越来越大。
工作人员在铁塔、脚手架、构架和悬梯等设备上徒手攀爬进行高空作业具有如下缺点:
一是登高作业人员在高空设备上进行徒手攀爬过程中,攀爬作业危险性大,缺少后备保险,一旦操作失误会危及作业人员生命安全;
二是攀爬登高作业极度消耗登高作业人员体力,作业劳动强度大;
三是人工徒手攀爬单日作业次数受登高作业人员个人体力限制,连续作业劳动效率低。
发明内容
本发明针对以上问题,提供了一种方便穿戴,节省人力,提高安全性的智能攀爬外骨骼系统。
本发明的技术方案为:包括上肢外骨骼和下肢外骨骼,所述上肢外骨骼包括机箱和一对机械手套,
所述机箱的顶部两端分别设有肩关节组件、底部设有U形管架,
所述肩关节组件与机械手套一一对应,所述肩关节组件内伸出用于连接机械手套的钢丝绳,所述机箱内设有控制器,所述控制器用于控制钢丝绳的收放动作;
所述下肢外骨骼包括一对下肢组件,一对下肢组件分别连接在所述管架的两端,所述下肢组件用于通过腿束带连接人体腿部。
所述机械手套包括依次设置的指端、指间、指根和掌骨,所述指端为T形块,所述指间的前端中间设有卡槽一,所述指端的中间垂直段活动位于指间的卡槽一内;
所述指根的前端中间设有卡槽二,所述指间的后端活动位于卡槽二内,
所述掌骨为方块体,所述掌骨的前端设有卡槽三,所述指根的后端活动位于卡槽三内;
所述掌骨上活动设有拇指和背挡,所述拇指位于掌骨的正面,所述背挡位于掌骨的背面;
所述拇指为指状板,所述拇指具有一对,一对拇指对称设在掌骨的两侧,一对拇指之间设有连杆,所述拇指的两侧分别设有拇指束带固定环;
所述背挡呈U形,所述背挡的两端活动连接在掌骨的两侧,所述背挡通过尼龙吊带连接钢丝绳连接管,所述钢丝绳连接管连接钢丝绳;
所述指根的两侧分别设有掌束带固定环,所述掌束固定环用于连接掌束带;
所述指根的内侧设有压力感应器,所述压力感应器用于连接控制器,
所述指根的后端设有机械手套行程开关,所述机械手套行程开关用于连接控制器。
还包括电磁器,所述电磁器设在掌骨内,所述背挡的一侧设有开关,所述开关用于控制电磁器。
还包括电磁继电器和一对指端卡笋,所述指端的水平段内设有容置槽,所述电磁继电器设在容置槽的中间,一对指端卡笋位于容置槽内且位于电磁继电器的两侧,所述指端卡笋通过弹簧连接电磁继电器,所述电磁继电器连接控制器;
所述拇指上设有拇指卡槽,所述拇指卡槽与指端卡笋一一对应,所述指端卡笋用于连接在拇指卡槽内。
还包括腕骨,所述掌骨的后端设有卡槽四,所述腕骨活动连接在掌骨的卡槽四内,所述腕骨呈板状,所述腕骨的两端分别设有侧挡,所述侧挡上设有腕骨束带固定孔,所述腕骨束带固定孔用于连接束带。
还包括腕骨行程开关,所述腕骨行程开关设在腕骨上,所述腕骨行程开关连接控制器。
所述机箱内设有隔板,所述隔板的上部为控制装置、下部为电池,所述控制器位于隔板的下部,所述控制器通过控制装置进而控制钢丝绳动作,所述电池用于对控制装置供电;
所述机箱的顶部两端分别设有穿孔,所述穿孔用于钢丝绳穿过;
所述机箱的两端位于穿孔下方分别设有胸束带固定环和腰束带固定环;
所述机箱的表面设有总开关,所述总开关用于电池的启闭动作。
所述控制装置包括驱动电机、电机齿轮、一对中间齿轮和一对收放组件,所述收放组件包括绞盘、绞盘齿轮、传动轴和离合器,
所述驱动电机用于驱动电机齿轮,所述电机齿轮位于一对中间齿轮之间,一对中间齿轮位于一对收放组件之间,所述中间齿轮与绞盘齿轮啮合,
所述传动轴水平设置且活动连接在机箱的上部,所述传动轴的一端伸入绞盘内,另一端伸入绞盘齿轮内,所述绞盘用于绕设钢丝绳;
所述传动轴具有两段,所述离合器设在传动轴的中间,用于将传动轴分离和接合,所述控制器用于控制离合器。
还包括刹车器,所述刹车器通过支座连接在隔板上,所述绞盘上设有刹车盘,所述刹车器连接控制器,所述刹车器用于刹住刹车盘。
所述肩关节组件包括肩关节支座、肩关节滑轮支座、肩关节滑轮轴和肩关节滑轮,所述肩关节支座和肩关节滑轮支座从内而外依次连接在机箱的穿孔外侧,所述肩关节滑轮轴垂直设置,
所述肩关节滑轮通过肩关节滑轮轴连接在肩关节滑轮支座内,所述钢丝绳绕肩关节滑轮动作。
还包括肩关节防尘罩,所述肩关节防尘罩连接在肩关节滑轮支座的外部。
还包括一对肩关节滚杆,一对肩关节滚杆平行且活动连接在肩关节防尘罩内,所述钢丝绳位于一对肩关节滚杆之间。
还包括肩关节行程开关,所述肩关节行程开关设在肩关节支座上,所述肩关节行程开关用于接触机箱,
所述肩关节行程开关连接控制器。
所述下肢组件包括支撑环、大腿管和小腿管,所述支撑环连接在管架上,所述支撑环的上端设有用于放置机械手套的挂钩、下端设有连板;
所述大腿管活动连接支撑环的连板,所述大腿管和小腿管之间活动连接,所述小腿管的底部连接脚踏;
所述大腿管和/或小腿管上设有腿束带固定环。
还包括大腿调节螺母,所述大腿管包括上下设置且具有外螺纹的管体一、二,所述管体一和管体二分别通过螺纹连接在大腿调节螺母内。
还包括缓冲器,所述缓冲器包括安置筒、缓冲弹簧和紧固帽,所述安置筒的上端活动连接连板,下端设有开口,
所述安置筒的开口内设有定位筒,所述缓冲弹簧套设在定位筒上、且位于开口内,
所述管体一的顶端设有台阶圆,所述台阶圆的直径小于安置筒的内径,所述台阶圆用于接触缓冲弹簧,所述定位筒用于伸入管体一内,
所述紧固帽具有上大下小的阶梯孔,所述管体一位于紧固帽的小阶梯孔内,所述安置筒通过螺纹连接在紧固帽的大阶梯孔内。
还包括挡圈,所述挡圈设在台阶圆的顶部,所述挡圈的内径等于管体一的内径,所述挡圈伸入开口内,所述缓冲弹簧套设在挡圈上,所述定位筒伸入挡圈内。
还包括小腿杆,所述小腿管通过小腿杆连接脚踏,所述小腿管具有内螺纹,所述小腿杆具有外螺纹,所述小腿管和小腿杆通过螺纹连接。
本发明在工作中,将上肢外骨骼通过熊束带和腰束带连接在作业人员背后,将下肢外骨骼通过腿束带连接在作业人员的腿部,易于穿戴和脱卸;
其中,上肢外骨骼包括机箱和一对机械手套,作业人员戴上机械手套后,通过机械手套动作,进而控制器控制调节钢丝绳长度,使之与人体手臂长度吻合,便于开展作业。
下肢外骨骼包括一对下肢组件,用于作业人员行走时,通过下肢组件承担机箱的重量,减轻人体背负重量。
本发明利用机械手套等帮助登高作业人员节省攀爬作业消耗体力问题、解决作业人员徒手攀爬过程中的后备安全保险问题。
附图说明
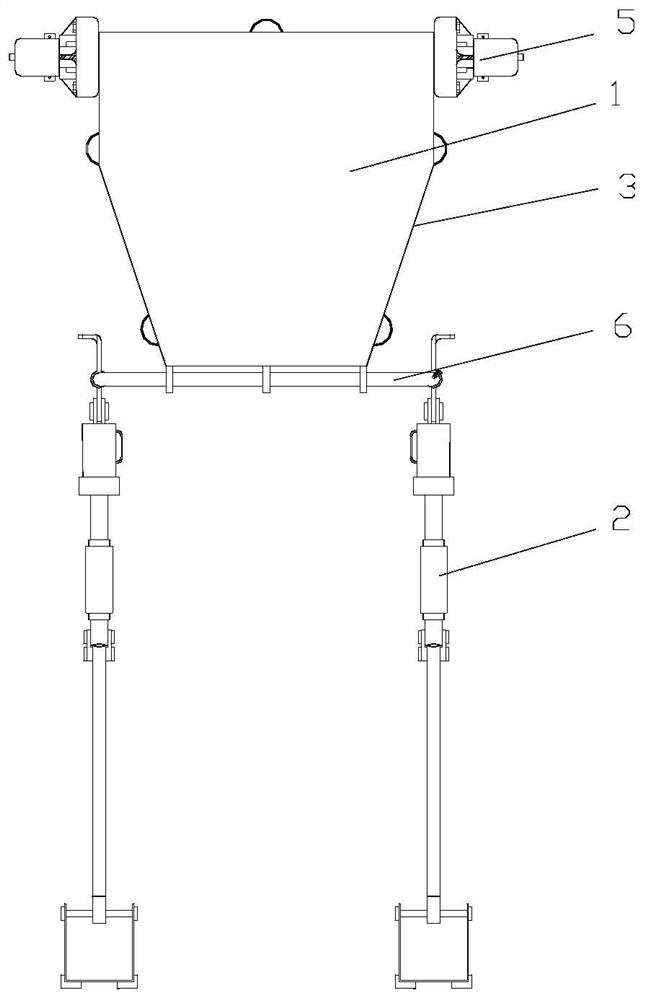
图1是本发明的结构示意图,
图2是图1的左视图,
图3是上肢外骨骼的结构示意图,
图4是图3的左视图,
图5是机箱的内部结构示意图,
图6是下肢外骨骼的结构示意图,
图7是图6中A-A面的剖视图,
图8是图6中B-B面的剖视图,
图9是机械手套的连接结构示意图,
图10是图9的左视图,
图11是图9的右视图,
图12是图9的弯曲状态图,
图13是指端的内部结构示意图,
图14是机械手套的立体结构示意图一,
图15是机械手套的立体结构示意图二,
图16是下肢外骨骼的折叠状态图一,
图17是下肢外骨骼的折叠状态图二,
图18是下肢外骨骼的折叠动作图,
图19是缓冲器的结构示意图,
图20是作业人员的穿戴示意图;
图中1是上肢外骨骼,
2是下肢外骨骼,20是下肢组件,21是支撑环,211是挂钩,212是连板,22是大腿管,221是管体一,2210是台阶圆,222是管体二,23是小腿管,24是脚踏,25是腿束带固定环,26是大腿调节螺母,27是缓冲器,271是安置筒,2710是定位筒,272是缓冲弹簧,273是紧固帽,28是挡圈,29是小腿杆;
3是机箱,31是隔板,32是电池,33是穿孔,34是胸束带固定环,35是腰束带固定环,36是下肢固定环,
4是机械手套,41是指端,42是指间,420是卡槽一,43是指根,430是卡槽二,44是掌骨,441是卡槽三,442是卡槽四,45是拇指,450是拇指卡槽,46是背挡,47是连杆,48是拇指束带固定环,49是尼龙吊带,410是钢丝绳连接管,411是掌束带固定环,412是压力感应器,413是机械手套行程开关,414是电磁器,415是开关,416是电磁继电器,417是指端卡笋,418是容置槽,419是弹簧,
5是肩关节组件,51是肩关节支座,52是肩关节滑轮支座,53是肩关节滑轮轴,54是肩关节滑轮,55是肩关节防尘罩,56是肩关节滚杆,57是肩关节行程开关,58是固定螺栓,
6是管架,7是钢丝绳,
8是腕骨,81是侧挡,82是腕骨束带固定孔,83是腕骨行程开关,
9是控制装置,91是驱动电机,92是电机齿轮,93是中间齿轮,94是收放组件,941是绞盘,942是绞盘齿轮,943是传动轴,944是离合器,95是刹车器,96是支座,97是刹车盘。
具体实施方式
本发明如图1-20所示,包括上肢外骨骼1和下肢外骨骼2,所述上肢外骨骼包括机箱3和一对机械手套4,
所述机箱3的顶部两端分别设有肩关节组件5、底部设有U形管架6,管架6连接在机箱底面的下肢固定环36内,方便后续旋转动作;
所述肩关节组件5与机械手套4一一对应,所述肩关节组件5内伸出用于连接机械手套的钢丝绳7,所述机箱内设有控制器,所述控制器用于控制钢丝绳的收放动作;
所述下肢外骨骼2包括一对下肢组件20,一对下肢组件20分别连接在所述管架6的两端,所述下肢组件用于通过腿束带连接人体腿部。
本发明在工作中,如图20所示,将上肢外骨骼通过胸束带和腰束带连接在作业人员背后,将下肢外骨骼通过腿束带连接在作业人员的腿部,易于穿戴和脱卸;
其中,上肢外骨骼包括机箱和一对机械手套,作业人员戴上机械手套后,通过机械手套动作,进而控制器控制调节钢丝绳长度,使之与人体手臂长度吻合,便于开展作业。
下肢外骨骼包括一对下肢组件,用于作业人员行走时,通过下肢组件承担机箱的重量,减轻人体背负重量。
本发明利用机械手套等帮助登高作业人员节省攀爬作业消耗体力问题、解决作业人员徒手攀爬过程中的后备安全保险问题。
如图9-15所示,所述机械手套4包括依次设置的指端41、指间42、指根43和掌骨44,所述指端41为T形块,所述指间42的前端中间设有卡槽一420,所述指端41的中间垂直段活动位于指间的卡槽一420内;
所述指根43的前端中间设有卡槽二430,所述指间42的后端活动位于卡槽二420内,
所述掌骨44为方块体,所述掌骨44的前端设有卡槽三441,441所述指根43的后端活动位于卡槽三441内;指端、指间、指根和掌骨之间两两连接可通过销轴进行连接,方便活动。
所述掌骨44上活动设有拇指45和背挡46,所述拇指位于掌骨的正面,所述背挡位于掌骨的背面;
所述拇指45为指状板,所述拇指具有一对,一对拇指对称设在掌骨的两侧,一对拇指之间设有连杆47,所述拇指的两侧分别设有拇指束带固定环48;
设置通过连杆连接的一对拇指,便于对攀爬物进行抓紧,动作可靠;
拇指束带固定环便于连接拇指束带,方便对作业人员的拇指进行固定;
所述背挡46呈U形,所述背挡的两端活动连接在掌骨的两侧,所述背挡通过尼龙吊带49连接钢丝绳连接管410,所述钢丝绳连接管连接钢丝绳7;
所述指根的两侧分别设有掌束带固定环411,所述掌束固定环用于连接掌束带;设置掌束带,方便对作业人员手掌固定;应用中,指间的两侧也可以设置掌束带固定环。
所述指根的内侧设有压力感应器412,所述压力感应器用于连接控制器,
所述指根的后端设有机械手套行程开关413(如按钮式行程开关,在作业人员伸平手掌时,机械手套行程开关进入卡槽三内,进行挤压,触发后续动作),所述机械手套行程开关用于连接控制器。
机械手套在工作中,通过将指端、指间、指根和掌骨依次两两连接,配合人体手掌动作,方便拆装;
其中,通过压力感应器感知人体攀爬动作,智能分析人体在攀爬过程中的动作,进而控制驱动电机控制钢丝绳产生与人体同步动作,助力人体攀爬。
通过机械手套行程开关,便于感知手掌的动作(伸平或握紧),进而通过控制器智能控制;
利用与钢丝绳连接管相连的尼龙吊带来缓冲钢丝绳作用力,避免造成对作业人员的损伤。
还包括电磁器414,所述电磁器设在掌骨内,所述背挡的一侧设有开关415,所述开关用于控制电磁器。
这样,机械手套的掌骨内有电磁器,通过开关可吸附在攀爬的铁件表面(角钢、槽钢、扁铁等铁金属),提高吸附连接的可靠性,从而提高安全性。
还包括电磁继电器416和一对指端卡笋417,所述指端的水平段内设有容置槽418,所述电磁继电器416设在容置槽的中间,一对指端卡笋417位于容置槽内且位于电磁继电器的两侧,所述指端卡笋417通过弹簧419连接电磁继电器,所述电磁继电器连接控制器;
所述拇指45上设有拇指卡槽450,所述拇指卡槽450与指端卡笋417一一对应,所述指端卡笋用于连接在拇指卡槽内。
机械手套可随人手弯曲做成握紧动作,机械手套的指端卡笋插入机械手套姆指卡槽内形成锁紧状态,当人手平伸时,机械手套行程开关触发控制器,控制器指令机械手套的指端卡笋内的电磁继电器动作、缩回指端卡笋,解除锁紧固定状态。
通过设置指端卡笋和拇指卡槽的连接形式,在抓住攀爬物时,提高锁紧可靠性,保护作业人员安全。
还包括腕骨8,所述掌骨44的后端设有卡槽四442,所述腕骨8活动连接在掌骨的卡槽四442内,所述腕骨8呈板状,所述腕骨的两端分别设有侧挡81,所述侧挡上设有腕骨束带固定孔82,所述腕骨束带固定孔用于连接束带。
设置腕骨,便于放置、支撑手腕,再通过束带进行固定,提高支撑稳固性。同时,手掌伸入背挡内,再通过掌束带固定;
还包括腕骨行程开关83,所述腕骨行程开关设在腕骨上,所述腕骨行程开关连接控制器。
通过设置腕骨行程开关(如按钮式行程开关),在作业人员将手与机械手套分离时,腕骨行程开关触发控制器,锁定驱动电机,进而锁定绞盘。
如图3-5所示,所述机箱内设有隔板31,所述隔板的上部为控制装置9、下部为电池32,所述控制器位于隔板的下部,所述控制器通过控制装置9进而控制钢丝绳7动作,所述电池32用于对控制装置供电;应用中,还向如电磁继电器等部件进行供电;
所述机箱的顶部两端分别设有穿孔33,所述穿孔用于钢丝绳穿过;
所述机箱的两端位于穿孔下方分别设有胸束带固定环34和腰束带固定环35;
所述机箱的表面设有总开关,所述总开关用于电池的启闭动作。
机箱在工作时,通过胸束带连接胸束带固定环,腰束带连接腰束带固定环,进而连接在作业人员上;
机箱内通过隔板进行分隔控制装置以及电池等,便于供电操作。
所述控制装置9包括驱动电机91、电机齿轮92、一对中间齿轮93和一对收放组件94,所述收放组件94包括绞盘941、绞盘齿轮942、传动轴943和离合器944,
所述驱动电机91用于驱动电机齿轮92,所述电机齿轮92位于一对中间齿轮93之间,一对中间齿轮93位于一对收放组件94之间,所述中间齿轮93与绞盘齿轮942啮合,
所述传动轴943水平设置且活动连接在机箱91的上部,所述传动轴的一端伸入绞盘941内,另一端伸入绞盘齿轮942内,所述绞盘用于绕设钢丝绳7;
所述传动轴943具有两段,所述离合器944设在传动轴的中间,用于将传动轴分离和接合,所述控制器用于控制离合器。
控制装置动作时,驱动电机通过电机齿轮进而驱动一对中间齿轮,再通过中间齿轮与对应的绞盘齿轮啮合动作,绞盘齿轮通过中间轴进而带动绞盘进行收放钢丝绳。
由于传动轴具有两段,便于通过离合器进行分离和接合,适应一对收放组件对应作业人员两个机械手套不同的动作形式,即一个手掌伸平,另一个手掌握住攀爬物;
伸平时,机械手套行程开关向控制器传送信息,使得对应的离合器动作,驱动电机动作,进而实现松钢丝绳;
握住攀爬物时,机械手套行程开关向控制器传送信息,使得对应的离合器动作,驱动电机动作,进而实现收紧钢丝绳。
应用中,向上动作状态,当机械手套中压力感应器的压力值≥5kg,感知人体手部握紧,机械手套锁紧攀爬物,离合器动作,连接驱动电机轴和绞盘轴,驱动电机进而驱动绞盘,通过肩部关节收紧钢丝绳,钢丝绳收紧尼龙吊带,进行向上提拉动作。
还包括刹车器95,所述刹车器通过支座96连接在隔板31上,所述绞盘上设有刹车盘97,所述刹车器连接控制器,所述刹车器95用于刹住刹车盘97。
作业人员在攀爬过程中松开握住攀爬物的手掌,控制器从机械手套压力感应器数值中感知后则认为是人体停止攀爬动作,则指令驱动电机停止转动,刹车器刹住刹盘,提高安全性。
所述肩关节组件5包括肩关节支座51、肩关节滑轮支座52、肩关节滑轮轴53和肩关节滑轮54,所述肩关节支座51和肩关节滑轮支座52从内而外依次连接在机箱3的穿孔33外侧,肩关节支座51和肩关节滑轮支座52通过固定螺栓58连接,
所述肩关节滑轮轴53垂直设置,
所述肩关节滑轮54通过肩关节滑轮轴53连接在肩关节滑轮支座52内,所述钢丝绳7绕肩关节滑轮动作。
在机箱的外部设置肩关节组件,这样,肩关节滑轮绕肩关节滑轮组转动,便于钢丝绳沿着肩关节滑轮移动,保证钢丝绳收放的可靠性。
还包括肩关节防尘罩55,所述肩关节防尘罩55连接在肩关节滑轮支座52的外部。
通过设置肩关节防尘罩,起到防尘、防雨的作用。
还包括一对肩关节滚杆56,一对肩关节滚杆56平行且活动连接在肩关节防尘罩内,所述钢丝绳7位于一对肩关节滚杆之间。
通过设置一对肩关节滚杆,便于对钢丝绳进行定位、定向,提高钢丝绳移动可靠性。
还包括肩关节行程开关57,所述肩关节行程开关设在肩关节支座上,所述肩关节行程开关用于接触机箱,
所述肩关节行程开关连接控制器。
通过设置肩关节行程开关(如按钮式行程开关),在手臂下落垂下时,锁定驱动电机,进而锁定绞盘,进一步提高安全性。
作业人员需背负机箱行走时,可以人工拽出下肢外骨骼,将脚踏踩于人体脚底,用腿束带将下肢外骨骼绑在人体腿上后,在野外自由行走时通过下肢外骨骼支承机箱重量,达到省力效果。
如图16-18所示,下肢外骨骼常规状态下,可进行折叠、携带,
第一种方式为:管架的U形口朝前时,将一对下肢组件绕管架直接向上翻转,使得下肢组件位于人体的两侧,这样,在使用时,下肢组件直接向下进行翻转;
第二种方式为:先将管架进行翻转,使得管架的U形口朝后设置,再将对下肢组件绕管架直接向上翻转,此时,下肢组件位于背后,适应不同的工况要求。
如图6-8所示,所述下肢组件包括支撑环21、大腿管22和小腿管23,所述支撑环21连接在管架上6,所述支撑环21的上端设有用于放置机械手套4的挂钩211、下端设有连板212;
所述大腿管22活动连接支撑环21的连板212,所述大腿管22和小腿管23之间活动连接,所述小腿管23的底部连接脚踏24;
所述大腿管22和/或小腿管23上设有腿束带固定环25。
下肢组件通过支撑环连接在管架上,方便拆装;同时,在支撑环的底部依次活动连接大腿管和小腿管,适应作业人员的动作需要;
设置腿束带固定环,便于连接腿束带,通过腿束带从而连接人体腿部,连接可靠;同时,在小腿管的底部设置脚踏,在作业人员行走时承担机箱的重量,减轻作业人员的背负重量,省力可靠。
应用中,脚踏的底部设有橡皮垫,提高防滑性。
还包括大腿调节螺母26,所述大腿管22包括上下设置且具有外螺纹的管体一、二,所述管体一221和管体二222分别通过螺纹连接在大腿调节螺母26内。
将大腿管设置成分体式(即管体一和管体二),通过螺纹连接在大腿调节螺母内,便于调节大腿管的长度,适应不同作业人员的需求(即对应大腿部)。
如图19所示,还包括缓冲器27,所述缓冲器包括安置筒271、缓冲弹簧272和紧固帽273,所述安置筒271的上端活动连接连板212,下端设有开口,
所述安置筒271的开口内设有定位筒2710,所述缓冲弹簧272套设在定位筒2710上、且位于开口内,
所述管体一221的顶端设有台阶圆2210,所述台阶圆的直径小于安置筒271的内径,所述台阶圆用于接触缓冲弹簧,所述定位筒用于伸入管体一221内,
所述紧固帽273具有上大下小的阶梯孔,所述管体一221位于紧固帽273的小阶梯孔内,所述安置筒271通过螺纹连接在紧固帽273的大阶梯孔内,此时,台阶圆位于紧固帽内。
设置缓冲器,进而缓冲行走时的作用力,提高使用寿命。
缓冲器通过将缓冲弹簧套设在安置筒内的定位筒上,管体一上的台阶圆接触支撑,再通过紧固帽进行锁紧动作,保证缓冲可靠性。
定位筒活动伸入管体一内,保证动作的稳定性。
还包括挡圈28,所述挡圈设在台阶圆的顶部,所述挡圈的内径等于管体一221的内径,所述挡圈伸入开口内,所述缓冲弹簧套设在挡圈上,所述定位筒2710伸入挡圈内。
设置挡圈,即将管体一的长度延长,便于管体一可靠伸入定位筒内;同时,提高管体一和安置筒之间相对移动的可靠性,保证缓冲稳定性。
还包括小腿杆29,所述小腿管23通过小腿杆29连接脚踏,所述小腿管23具有内螺纹,所述小腿杆29具有外螺纹,所述小腿管和小腿杆通过螺纹连接。
这样,便于通过两者的螺纹连接,进而调节长度,适应不同作业人员的需求(即对应小腿部)。
对于本案所公开的内容,还有以下几点需要说明:
(1)、本案所公开的实施例附图只涉及到与本案所公开实施例所涉及到的结构,其他结构可参考通常设计;
(2)、在不冲突的情况下,本案所公开的实施例及实施例中的特征可以相互组合以得到新的实施例;
以上,仅为本案所公开的具体实施方式,但本公开的保护范围并不局限于此,本案所公开的保护范围应以权利要求的保护范围为准。
- 一种智能攀爬外骨骼系统
- 一种智能攀爬机器人用智能电气控制系统及其控制方法