弹跳机器人及其动量轮组件和姿态控制方法
文献发布时间:2023-06-19 13:51:08
技术领域
本发明属于机器人技术领域,具体的为一种弹跳机器人及其动量轮组件和姿态控制方法。
背景技术
弹跳机器人的研究也得到广泛的关注和迅猛的发展。弹跳是弹跳机器人最主要和最擅长的运动特征。公开号为CN110466635B的中国专利公开的一种电磁释放弹跳机器人及羽毛球机器人和电磁释放弹跳机构。现有的弹跳机器人在起跳后,整个机器人的质心沿起跳方向呈抛物线运动,在机器人完成捕捉、击打等任务后,机器人的姿态会发生偏离。如果着陆时的姿态不当,导致机器人的重心偏移或者过于侧倾,在着陆冲击力作用下,机器人会发生侧翻,极不利于系统的安全性和稳定性。
发明内容
有鉴于此,本发明的目的在于提供一种弹跳机器人及其动量轮组件和姿态控制方法,可以调整弹跳机器人着陆姿态,避免因着陆点精度差、易侧翻等危险情况。
为达到上述目的,本发明提供如下技术方案:
本发明首先提出了一种动量轮组件,包括轮臂,所述轮臂上设有与其转动配合的轮轴,所述轮轴上设有与其同步转动的动量轮,所述轮臂上还设有用于驱动所述轮轴转动的动量轮驱动机构。
进一步,所述动量轮驱动机构包括伺服电机,所述伺服电机的输出轴与所述轮轴之间设有传动机构。
进一步,所述传动机构包括相互啮合的涡轮和蜗杆,所述涡轮的转轴与所述伺服电机的输出轴之间传动连接,所述蜗杆套设在所述轮轴上并与所述轮轴同步转动。
进一步,所述轮轴的两端分别设有所述动量轮。
本发明还提出了一种弹跳机器人,包括机器人本体,所述机器人本体包括基座,所述基座上环形均布设有至少两个如上所述的动量轮组件,所述轮臂与所述基座固定连接。
进一步,所述基座上环形均布设有两个或三个所述的动量轮组件。
进一步,所述基座和用于执行动作的执行连杆。
本发明还提出了一种适用于如上所述弹跳机器人的姿态控制方法,包括如下步骤:
1)以所述弹跳机器人的质心以及所述弹跳机器人各关节的旋转角构建广义坐标;
2)计算弹跳机器人的总动能E
3)根据拉格朗日函数得到弹跳机器人的动力学方程:
其中,τ
将动力学方程改写为状态方程形式:
其中,
X为系统状态变量,且:
U是控制参数向量;且U(t)∈R
t表示时间;
4)确定状态方程的初始条件和终端条件;当终端时刻固定时,自由终点的横截条件为:
5)定义性能指标:
其中,J是性能泛函;
6)确定控制作用的容许范围,并以各关节最大驱动力为控制约束τ
7)将求解得到的最优控制施加于用状态方程描述的弹跳机器人。
进一步,所述步骤2)中,弹跳机器人的总动能E
其中,E
其中,v
其中,a
进一步,所述步骤2)中,弹跳机器人的总势能E
其中,E
本发明的有益效果在于:
本发明的弹跳机器人,通过伺服电机控制驱动反作用动量轮旋转,本质上形成对基座质心的角动量,动量轮产生的角动量与基座自身的角动量之间产生所需的交换,使得机器人基座在着陆之前的瞬间有合适的姿态和小的角速度,最终为机器人着陆的安全性和可靠性提供保障,具有计算量小、结构简单、便于安装等特点,所需相关参数可通过内置传感器或低成本外设传感器测得。
本发明的弹跳机器人的姿态控制方法,通过在弹跳机器人的基座上设置动量轮组件,使动量轮的旋转面位于铅垂面,即动量轮的旋转面均位于铅垂面,从而形成以扭矩为控制量以调整基座姿态;具体的,首先取广义坐标,计算系统动能、势能和拉格朗日函数,得到系统的动力学方程并整理为状态方程,确定初始条件和末端条件,以基座着陆时刻角速度和姿态控制总能量为性能泛函,根据关节电机最大驱动力确定控制容许范围,利用极小值原理求解优化问题,得到各关节所需的驱动控制力。
附图说明
为了使本发明的目的、技术方案和有益效果更加清楚,本发明提供如下附图进行说明:
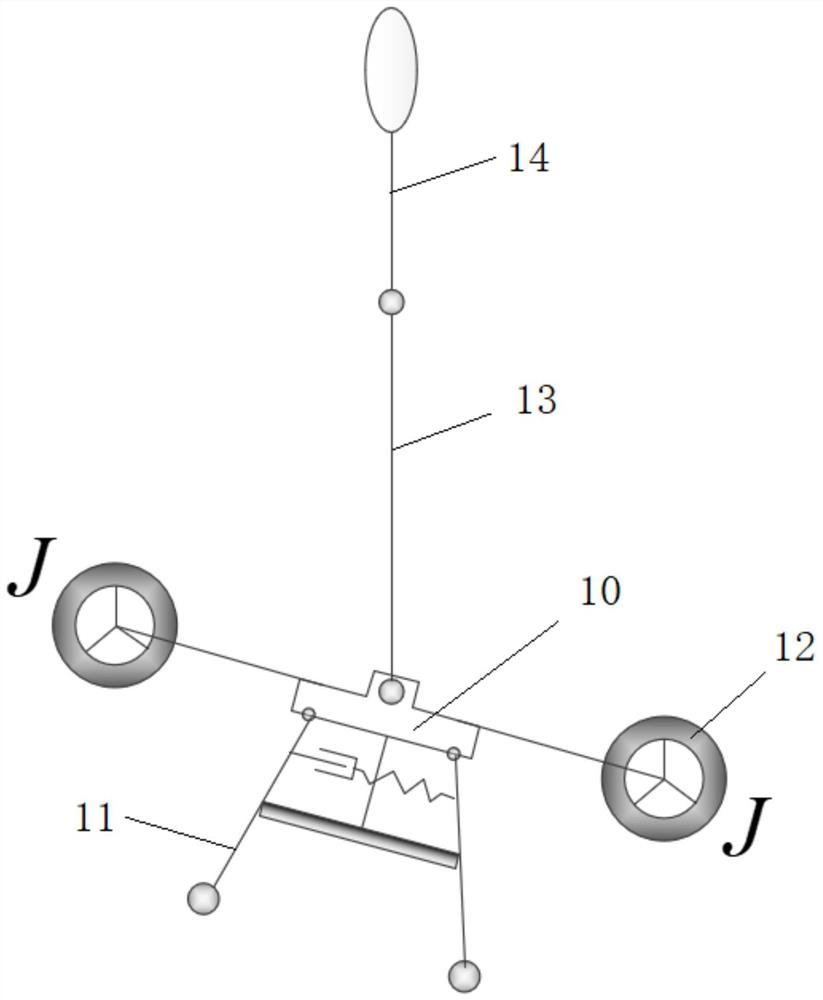
图1为本发明弹跳机器人实施例的结构示意图;
图2为动量轮组件的结构示意图;
图3为平面弹跳机器人的动量轮组件安装结构示意图;
图4为空间弹跳机器人的动量轮组件安装结构示意图;
图5为平面弹跳机器人的力学建模示意图;
图6为ADAMS软件环境中平面弹跳机器人动力学模型图;
图7为ADAMS软件环境中平面弹跳机器人基座姿态控制仿真结果示意图。
附图标记说明:
1-轮臂;2-轮轴;3-动量轮;4-伺服电机;5-涡轮;6-蜗杆;7-转轴;8-轮轴座;9-涡轮座;10-基座;11-弹跳腿;12-动量轮组件;13-大臂;14-小臂。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好的理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
如图1所示,为本发明弹跳机器人实施例的结构示意图。本实施例的弹跳机器人,包括机器人本体,机器人本体包括基座10,基座10上环形均布设有至少两个动量轮组件。如图2所示,本实施例的动量轮组件,包括轮臂1,轮臂1上设有与其转动配合的轮轴2,轮轴2上设有与其同步转动的动量轮3,轮臂1上还设有用于驱动轮轴2转动的动量轮驱动机构。轮臂1与基座10固定连接。
进一步,本实施例的动量轮驱动机构包括伺服电机4,伺服电机4的输出轴与轮轴2之间设有传动机构。本实施例的传动机构包括相互啮合的涡轮5和蜗杆6,涡轮5的转轴7与伺服电机4的输出轴之间传动连接,蜗杆6套设在轮轴2上并与轮轴2同步转动。本实施例的轮轴2的两端分别设有动量轮3,轮臂1上设有轮轴座8和涡轮座9,轮轴2转动配合安装在轮轴座8上,涡轮5的转轴7转动配合安装在涡轮座9上。本实施例的涡轮5的转轴7与伺服电机4的输出轴之间通过联轴器传动相连。
进一步,基座10上环形均布设有两个或三个的动量轮组件。具体的,当基座10上环形均布设有两个动量轮组件12时,此时的弹跳机器人为平面弹跳机器人,如图3所示;当当基座10上环形均布设有三个动量轮组件12时,此时的弹跳机器人为空间弹跳机器人,如图4所示。
进一步,基座10上设有弹跳腿11和用于执行动作的执行连杆。以公开号为CN110466635B的中国专利公开的一种电磁释放弹跳机器人为例,该电磁释放弹跳机器人的基座10上环形均布设有3根弹跳腿11,执行连杆构成羽毛球击球机构,包括固定设置在基座10上的大臂转轴,大臂转轴上套装设有与其同步转动的大臂13,大臂13内套装设有与其同轴的小臂14,小臂14的顶部设有手腕,手腕上设有手腕转轴,手腕转轴上套装设有与其转动配合的拍柄固持器,拍柄固持器上安装设有球拍。
当然,本实施例的弹跳机器人的基座10上还设有姿态传感器、电源、运动控制器等,不再累述。
本实施例的弹跳机器人,通过伺服电机控制驱动反作用动量轮旋转,本质上形成对基座质心的角动量,动量轮产生的角动量与基座自身的角动量之间产生所需的交换,使得机器人基座在着陆之前的瞬间有合适的姿态和小的角速度,最终为机器人着陆的安全性和可靠性提供保障,具有计算量小、结构简单、便于安装等特点,所需相关参数可通过内置传感器或低成本外设传感器测得。
下面以公开号为CN110466635B的中国专利公开的一种电磁释放弹跳机器人为例,对本实施例的弹跳机器人的姿态控制方法的具体实施方式进行详细说明。
本实施例的弹跳机器人的姿态控制方法,包括如下步骤:
1)以弹跳机器人的质心以及弹跳机器人各关节的旋转角构建广义坐标。具体的,取弹跳机器人的质心(x
2)计算弹跳机器人的总动能E
具体的,弹跳机器人的总动能E
其中,E
其中,v
其中,a
弹跳机器人的总势能E
其中,E
具体的,本实施例中:
其中,E
3)根据拉格朗日函数得到弹跳机器人的动力学方程:
其中,τ
具体的:
其中,τ
将动力学方程改写为状态方程形式:
其中,X是系统状态向量,且:
即X(t)∈R
U表示控制参数向量;且U(t)∈R
t表示时间。
本实施例中:
U(t)=[0,0,0,0,0,0,0,τ
4)确定状态方程的初始条件和终端条件。
具体的,状态方程的初始条件为:X(t
状态方程的终端条件为:X(t
当终端时刻固定时,自由终点的横截条件为:
5)定义性能指标:
其中,J是性能泛函;
6)确定控制作用的容许范围,并以各关节最大驱动力为控制约束|τ
以极小值原理求解最优控制,本实施例根据庞特里亚金极小值原理求解最优控制
7)将求解得到的最优控制施加于用状态方程描述的弹跳机器人,具体的,将最优控制
本实施例通过在动力学仿真软件ADAMS中仿真,验证本实施例弹跳机器人姿态控制方法的有效性,如图5所示,为在ADAMS中建立的平面弹跳机器人动力学模型,如图6所示,为依本发明所提出的方法进行的平面弹跳机器人基座姿态控制仿真。
本实施例弹跳机器人的姿态控制方法,通过在弹跳机器人的基座上设置动量轮组件,使动量轮的旋转面位于铅垂面,即动量轮的旋转面均位于铅垂面,从而形成以扭矩为控制量以调整基座姿态;具体的,首先取广义坐标,计算系统动能、势能和拉格朗日函数,得到系统的动力学方程并整理为状态方程,确定初始条件和末端条件,以基座着陆时刻角速度和姿态控制总能量为性能泛函,根据关节电机最大驱动力确定控制容许范围,利用极小值原理求解优化问题,得到各关节所需的驱动控制力。
以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
- 弹跳机器人及其动量轮组件和姿态控制方法
- 一种磁力线圈结合动量轮的航天器姿态联合控制方法