一种超热中子产生系统及操作方法
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及硼中子俘获治疗技术领域,具体涉及一种超热中子产生系统及操作方法。
背景技术
硼中子俘获治疗(Boron Neutron Capture Therapy,BNCT)是通过静脉或其它给药方式,将含硼药物注入癌症病人体内,当含硼药物选择性地富集在癌细胞中时,用热中子或超热中子照射患癌部位,硼(
目前,医院环境利用加速器中子源来实现BNCT已经日渐成为世界性的共识。有许多不同类型的加速器被考虑应用于BNCT。但这些加速器产生的高能中子束对人体正常组织有很大的损伤作用,不能直接照射人体,必须通过中子慢化体将快中子转化成对人体损伤较小的热中子或超热中子才能用于硼中子俘获治疗。热中子能区小于0.5eV,其穿透力较弱,主要用于人体较浅部位癌症。超热中子能区在0.5eV到40keV之间,其穿透力较强,则用于人体较深部位癌症,如脑胶质瘤、头颈部癌症、乳腺癌、肺癌和肝癌等的治疗。
在基于加速器中子源的BNCT系统中,现有的中子俘获治疗系统或中子束整形装置都混淆了铍靶和锂靶的使用条件。超热中子的注量率是中子俘获治疗最关键的参数,国际原子能机构推荐标准是大于等于1×10
并且,在基于加速器的BNCT过程中,存在一个共性的问题是:在高能中子产生过程,靶附件的材料出现中子活化现象,停机后几天之内,靶附近的剂量率仍大于99mSv/min。
在
对人体较深部位的癌症治疗,不同的个体,患癌位置也有所不同,因而需要不同的超热中子能量分布,才能达到最好的治疗效果。但是,现有的中子俘获治疗系统或中子整形装置还不能有效地调节超热中子的能量分布。
发明内容
本发明的目的在于提供一种超热中子产生系统,不仅能够实现调节超热中子的能量分布,且能避免工作人员受到辐照剂量。
此外,本发明还提供上述超热中子产生系统的操作方法。
本发明通过下述技术方案实现:
一种超热中子产生系统,包括加速器漂移管和中子整形系统,所述加速器漂移管一端与高能质子加速器连接,另一端与中子整形系统连接,还包括移动滑台、控制单元、伸缩组件和机器人;
所述中子整形系统包括靶组件、慢化体组件和反射体组件;
所述反射体组件由第一反射体和第二反射体组成,所述靶组件和慢化体组件分别可拆卸式设置在第一反射体和第二反射体内;
所述移动滑台用于实现第一反射体和第二反射体在质子运行方向移动,以实现第一反射体和第二反射体连接或分离;
所述伸缩组件一端与第一反射体连接,另一端与加速器漂移管连接;
所述机器人用于更换靶组件和慢化体组件;
所述控制单元用于控制机器人动作以及控制第一反射体和第二反射体移动。
本发明所述反射体组件为分体式结构,由第一反射体和第二反射体组成,通过移动滑台用于实现第一反射体和第二反射体在质子运行方向移动,以实现第一反射体和第二反射体连接或分离,以便于实现对靶组件和慢化体组件的更换,通过更换不同厚度或材料的慢化体组件,能够实现调节超热中子的能量分布。
本发明所述伸缩组件用于配合第一反射体第一反射体的移动。
并且,本发明第一反射体和第二反射体的连接和分离,以及更换靶组件和慢化体组件都无需人工操作,采用控制单元控制第一反射体和第二反射体移动,并且可通过控制单元控制机器人操作更换靶组件和慢化体组件,有效避免了工作人员受到辐照剂量。
进一步地,移动滑台包括第一滑车、第二滑车和滑轨;
所述第一滑车和第二滑车由控制单元驱动在滑轨上移动;
所述第一反射体和第二反射体分别安装在第一滑车和第二滑车上。
进一步地,控制单元包括控制器、注量率测量仪、束流测量仪、第一驱动机构和第二驱动机构;
所述注量率测量仪用于采集中子整形系统出口处的超热中子注量率,并将采集的超热中子注量率传递给控制器;
所述束流测量仪用于采集流入伸缩组件中的高能质子束流强度,并将采集的高能质子束流强度传递给控制器;
所述控制器根据接收的超热中子注量率和高能质子束流强度判断是否需要更换靶组件和慢化体组件;
所述第一驱动机构和第二驱动机构与控制器电连接,分别用于驱动第一滑车和第二滑车移动。
本发明设置束流测量仪用于测量轰击靶组件上的高能质子束流强度,注量率测量仪用于测量超热中子注量率,两者联合使用以判断整个系统运行是否正常并决定是否需要更换靶组件或者更换慢化体组件。提高了整个系统的运行效率。
进一步地,伸缩组件与加速器漂移管的连接处设置有真空系统,所述控制器用于控制真空系统,当超热中子产生系统运行时,加速器漂移管和伸缩组件均处于高真空状态;当超热中子产生系统停机时,加速器漂移管处于高真空状态,伸缩组件处于大气环境状态。
控制器用于控制真空系统的具体操作为:
系统运行时,控制真空阀开通,真空泵为伸缩组件与加速器漂移管内部抽真空;系统停机时,控制真空阀关闭,伸缩组件被放气直至大气环境状态。
进一步地,伸缩组件为波纹管;
所述波纹管一端与加速器漂移管连接,另一端设置在第一反射体的轴向通孔内,所述靶组件设置在波纹管内,当第一反射体和第二反射体分离时,波纹管处于压缩状态。
进一步地,第一反射体和第二反射体连接时,所述第一反射体和第二反射体之间的连接处形成阶梯状的反射体分界面。
上述阶梯状的反射体分界面能够提高第一反射体和第二反射体连接界面的密封效果,避免快中子由分界面泄漏,相当于提高了超热中子注量率。
进一步地,靶组件包括钛密封防护层、铍靶和冷却结构;
所述钛密封防护层包裹在铍靶外侧;
所述冷却结构用于对铍靶进行冷却处理。
钛密封防护层紧密包封铍靶,使铍材料在运输过程、存储过程和使用过程中,铍毒都不会散发出来,体现了系统的安全性。同时,钛密封防护层也能防止铍靶的质子入射面表面产生氧化而降低中子产额,增加铍靶的工作寿命。
进一步地,慢化体组件包括沿着质子运行方向依次相邻设置的高能段慢化体、中能段慢化体、低能段慢化体和整形体;
所述高能段慢化体与靶组件相向设置或接触;
所述整形体为圆台结构,所述整形体的大端与低能段慢化体相邻设置,所述整形体的小端与热中子吸收层连接;
所述第二反射体远离第一反射体一端呈内腔为圆锥体状,形成准直器。
即本发明的慢化体组件采用以中子能量分段慢化,提高了慢化效率。
进一步地,第一反射体和第二反射体的外壁上均设置有屏蔽层,所述屏蔽层用于屏蔽快中子。
如上述超热中子产生系统的操作方法,包括以下步骤:
S1、组装完成超热中子产生系统并运行,用于产生超热中子;
S2、在超热中子产生系统运行过程中,注量率测量仪实时采集中子整形系统出口处的超热中子注量率,并将采集的超热中子注量率传递给控制器;束流测量仪实时采集流入伸缩组件中的高能质子束流强度,并将采集的高能质子束流强度传递给控制器;
当设置有真空系统时,在超热中子产生系统运行过程中,由控制器控制真空系统使加速器漂移管和伸缩组件均处于高真空状态;
S3、控制器根据接收的超热中子注量率和高能质子束流强度判断超热中子产生系统是否正常:
当判断结果为正常时,超热中子产生系统继续运行;
当判断结果为非正常时,由控制器控制超热中子产生系统停机更换靶组件和慢化体组件;
S4、由控制器控制第一驱动机构工作,或由控制器控制第一驱动机构和第二驱动机构工作,使第一滑车和第二滑车相互远离,实现第一反射体和第二反射体分离;
S5、由控制器控制机器人更换靶组件和慢化体组件;
S6、靶组件和慢化体组件更换完成后,由控制器控制第一驱动机构工作,或由控制器控制第一驱动机构和第二驱动机构工作,使第一滑车和第二滑车相互靠近,直到第一反射体和第二反射体连接;
当设置有真空系统时,在超热中子产生系统停机过程中,由控制器控制真空系统使加速器漂移管处于高真空状态,伸缩组件处于大气环境状态。
本发明与现有技术相比,具有如下的优点和有益效果:
1、本发明通过将反射体组件为分体式结构,通过控制单元和移动滑台的配合即可实现第一反射体和第二反射体的连接和分离,且可通过控制单元控制机器人操作更换靶组件和慢化体组件,不仅能够实现调节超热中子的能量分布,且能避免工作人员受到辐照剂量。
2、本发明按快中子能量进行分段,分别设置高能段慢化体、中能段慢化体、低能段慢化体和整形体,使系统的慢化效率大大提高,且阶梯状的反射体分界面放防止泄漏,提高了中子注量率。
3、本发明靶组件的使用寿命长,避免铍毒泄漏,安全性高。
附图说明
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
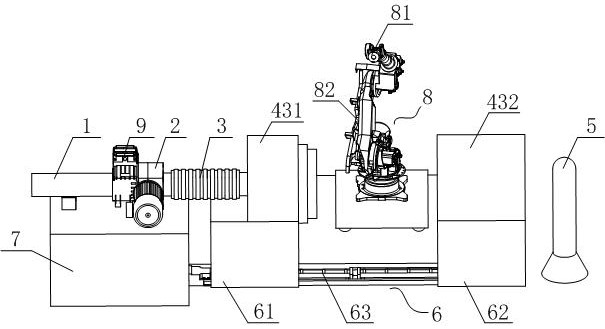
图1为本发明超热中子产生系统反射体分开的示意图;
图2为本发明超热中子产生系统反射体合拢的示意图;
图3为本发明中子整形系统的结构示意图;
图4为本发明靶组件的结构示意图;
图5为本发明慢化体组件的结构示意图;
图6为本发明超热中子产生系统的结构框图。
附图中标记及对应的零部件名称:
1-加速器漂移管;2-真空系统;3-波纹管;4-中子整形系统;5-注量率测量仪;6-移动滑台;7-控制箱;8-机器人;9-束流测量仪;41-靶组件,42-慢化体组件,43-反射体组件;44-屏蔽层;45-热中子吸收层;46-准直器;61-第一滑车;62-第二滑车;63-滑轨; 81-机械手;82-机身;411-钛密封防护层;412-铍靶;413-铜衬底层;414-冷却水通道;415-进水口;416-出水口;421-高能段慢化体;422-中能段慢化体;423-低能段慢化体;424-整形体;431-第一反射体;432-第二反射体;433-反射体分界面。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
实施例1:
如图1-图6所示,一种超热中子产生系统,包括加速器漂移管1、中子整形系统4、移动滑台6、控制单元、伸缩组件和机器人8,所述加速器漂移管1一端与高能质子加速器连接,另一端与中子整形系统4连接。
中子整形系统4包括靶组件41、慢化体组件42和反射体组件43;
反射体组件43由第一反射体431和第二反射体432组成,第二反射体432远离第一反射体431一端呈内腔为圆锥体状,形成准直器46,反射体组件43的材料为铅,整体形成一个空心圆柱体,空心圆柱体的外径、内径、长度等需根据入射高能质子束流的能量和流强参数通过模拟计算确定,所述靶组件41和慢化体组件42分别可拆卸式设置在第一反射体431和第二反射体432内,能实现靶组件41和慢化体组件42的安装与拆卸,便于更换操作,靶组件41用于受到质子束流轰击产生快中子;慢化体组件42包括慢化体和整形体424,慢化体和整形体424分别用于对快中子进行慢化和整形产生治疗用的超热中子;靶组件41中的靶材料优选采用铍靶412;慢化体的材料可以根据实际能量分布需要进行确定。
移动滑台6用于实现第一反射体431和第二反射体432在质子运行方向相同或相反的方向移动,以实现第一反射体431和第二反射体432连接或分离,质子运行方向如图3中的水平虚线箭头所指方向。在更换靶组件41和慢化体组件42时,可使第二反射体432相对固定,使第一反射体431相对第二反射体432移动。
伸缩组件一端与第一反射体431连接,另一端与加速器漂移管1连接,伸缩组件的设置是为了配合第一反射体431的移动,伸缩组件可以是任何可实现伸缩的管道,既能满足形成质子通道,又能伸缩方便,例如伸缩组件可以是波纹管3。
机器人8用于更换靶组件41和慢化体组件42;机器人8包括机身82和机械手81,所述机身82能在地面上任意移动,所述机械手81设置在机身82上,用于操作更换靶组件41和慢化体组件42,机器人8为现有技术。
控制单元用于控制机器人8动作以及控制第一反射体431和第二反射体432移动。
本实施例的超热中子产生系统和质子加速器一起安装在加速器大厅。
本实施例的工作原理为:
当超热中子束的产生系统运行时,来源于质子加速器并进入伸缩组件的质子束流轰击中子整形系统4中的带防护靶组件41中的靶材料,产生快中子,快中子通过中子整形系统4中的慢化体组件42进行慢化和整形,产生治疗用的超热中子。中子整形系统4的反射体组件43设置在慢化体组件42的外围,主要用于对快中子进行反射,将偏离系统轴线的快中子导回主轴位置处,提高快中子产额,进而提高超热中子的注量率;反射体组件43也用于屏蔽γ射线。
本实施例通过将反射体组件43为分体式结构,通过控制单元和移动滑台6的配合即可实现第一反射体431和第二反射体432的连接和分离,且可通过控制单元控制机器人8操作更换靶组件41和慢化体组件42,不仅能够实现调节超热中子的能量分布,且能避免工作人员受到辐照剂量。
在一个具体案例中:
移动滑台6包括第一滑车61、第二滑车62和滑轨63;
滑轨63的长度方向为质子运行方向;
第一滑车61和第二滑车62由控制单元驱动在滑轨63上移动,其中,第一滑车61和第二滑车62均在滑轨63上沿着质子运行相同或相反方向移动;
第一反射体431和第二反射体432分别安装在第一滑车61和第二滑车62上,通过第一滑车61和第二滑车62相向或相背移动实现第一反射体431和第二反射体432相向或相背移动,进而实现第一反射体431和第二反射体432连接或分离,
控制单元包括控制器、注量率测量仪5、束流测量仪9、第一驱动机构和第二驱动机构,其中,为了便于保护控制器,将控制器安装在控制箱7内,为了便于监控,控制器与控制中心采用有线方式通信连接。
注量率测量仪5设置在中子整形系统4的出口处,用于采集中子整形系统4出口处的超热中子注量率,并将采集的超热中子注量率传递给控制器;
束流测量仪9设置在伸缩组件与加速器漂移管1连接处,用于采集流入伸缩组件中的高能质子束流强度,并将采集的高能质子束流强度传递给控制器;
控制器根据接收的超热中子注量率和高能质子束流强度判断是否需要更换靶组件41和慢化体组件42;
第一驱动机构和第二驱动机构与控制器电连接,分别用于驱动第一滑车61和第二滑车62移动;第一驱动机构用于驱动第一滑车61沿着质子运行相同或相反方向移动;第二驱动机构用于驱动第二滑车62沿着质子运行相同或相反方向移动。
伸缩组件为波纹管3;所述波纹管3一端与加速器漂移管1连接,另一端设置在第一反射体431的轴向通孔内,所述靶组件41设置在波纹管3内。
在一个优选案例中,为了避免第一反射体431和第二反射体432连接处中子泄漏,第一反射体431和第二反射体432连接时,所述第一反射体431和第二反射体432之间的连接处形成阶梯状的反射体分界面433。
示例性的:
如图3所示,反射体组件43的整体外形等径的圆柱体,其中,第一反射体431与第二反射体432连接的一端端面为向外凸出的阶梯结构,第二反射体432与第一反射体431连接的一端端面为向内凹陷的阶梯结构,当第一反射体431与第二反射体432连接时,第一反射体431端面的阶梯结构与第二反射体432端面的阶梯结构相互嵌合。
在一个优选案例中,第一反射体431和第二反射体432的外壁上均设置有屏蔽层44,所述屏蔽层44用于屏蔽快中子。屏蔽层44为含硼聚乙烯层,能够达到屏蔽快中子的作用,避免快中子对被治疗人员造成辐射伤害。
本实施例的操作方法,包括以下步骤:
S1、组装完成超热中子产生系统并运行,用于产生超热中子;
S2、在超热中子产生系统运行过程中,注量率测量仪5实时采集中子整形系统4出口处的超热中子注量率,并将采集的超热中子注量率传递给控制器;束流测量仪9实时采集流入伸缩组件中的高能质子束流强度,并将采集的高能质子束流强度传递给控制器;
S3、控制器根据接收的超热中子注量率和高能质子束流强度判断超热中子产生系统是否正常:
当判断结果为正常时,超热中子产生系统继续运行;
当判断结果为非正常时,由控制器控制超热中子产生系统停机更换靶组件41和慢化体组件42;
S4、由控制器控制第一驱动机构工作,或由控制器控制第一驱动机构和第二驱动机构工作,使第一滑车61和第二滑车62相互远离,实现第一反射体431和第二反射体432分离;
S5、由控制器控制机器人8更换靶组件41和慢化体组件42;
S6、靶组件41和慢化体组件42更换完成后,由控制器控制第一驱动机构工作,或由控制器控制第一驱动机构和第二驱动机构工作,使第一滑车61和第二滑车62相互靠近,直到第一反射体431和第二反射体432连接。
示例性的:
当束流测量仪9测得高能质子束流强度处于正常状态,而注量率测量仪5测得超热中子注量率低于正常状态时,则控制器判断应该更换靶组件41,控制器控制超热中子产生系统停机,移动滑台6执行分离移动指令:
第一驱动机构驱动第一滑车61在滑轨63上沿着质子运行方向的反方向移动,波纹管3处收缩状态,第一反射体431远离支撑第二反射体432的第二滑车62,直到第一反射体431和第二反射体432之间的距离能使靶组件41处于便于取出的状态和位置。
同时,机器人8也接收到控制器的换靶指令,完成以下操作:机器人8移动到合适的位置,其机身82转动到合适的方向,其机械手81断开靶组件41与波纹管3和第一反射体431之间的连接,取出旧的靶组件41,把新的靶组件41连接到波纹管3内,并将波纹管3连接到和第一反射体431内,使靶组件41和相关联部件安装到正常工作状态和位置。移动滑台6执行组合移动指令,第一滑车61负载第一反射体431在滑轨63上沿着质子运行方向移动,与负载第二反射体432的第二滑车62合拢,波纹管3处拉伸状态。靶组件41、慢化体组件42和反射体组件43及其相关部件都处于正常运行状态。
执行更换慢化体组件42的指令时,移动滑台6执行组合移动指令同上,区别在于机器人8的操作不同,是根据更换慢化体组件42指令进行相应操作。
高能量质子加速器在停机后的几天内,存在高能中子活化所产生超剂量放射性问题。本实施例利用控制器实现人机对话,通过控制器控制机器人8和移动滑台6,对超热中子产生系统进行维护、维修、更换靶组件41、更换慢化体组件42等操作。最大限度避免工作人员遭受超剂量辐照,同时保证超热中子产生系统不长时间中断运行; 系统的安全性效果更为显著。
本实施例通过设置束流测量仪9用于测量轰击靶组件41上的高能质子束流,注量率测量仪5用于测量超热中子注量率,两者联合使用以判断整个系统运行是否正常并决定是否需要更换靶组件41或者更换慢化体组件42;提高了整个系统的运行效率。
实施例2:
如图1-图6所示,本实施例基于实施例1,波纹管3与加速器漂移管1的连接处设置有真空系统2,所述控制器用于控制真空系统2,当超热中子产生系统运行时,加速器漂移管1和伸缩组件均处于高真空状态;当超热中子产生系统停机时,真空系统2中真空阀关闭,使加速器漂移管1处于高真空状态,伸缩组件处于大气环境状态;以便维持质子加速器与波纹管3之间处于隔离状态,换靶操作不影响质子加速器的状态。
本实施例的操作方法同实施例的区别在于:
当设置有真空系统2时,在超热中子产生系统运行过程中,由控制器控制真空系统2使加速器漂移管1和伸缩组件均处于高真空状态;
当设置有真空系统2时,在超热中子产生系统停机过程中,由控制器控制真空系统2使加速器漂移管1处于高真空状态,伸缩组件处于大气环境状态。
实施例3:
如图1-图6所示,本实施例基于实施例1,靶组件41包括钛密封防护层411、铍靶412、铜衬底层413、冷却结构。
钛密封防护层411包裹在铍靶412外侧,铍靶412的形状为方形片或圆片形;通过设置钛密封防护层411使铍靶412不外露,使其在运输过程、存储过程和使用过程中铍毒都不会散发出来。同时,也防止质子入射面的铍靶412表面产生氧化而降低中子产额。
冷却结构包括冷却水通道414、进水口415和出水口416,用冷却结构于对铍靶412进行冷却处理,进水口415和出水口416分别设置在冷却水通道414在两端,冷却水通道414、进水口415和出水口416一起构成水冷却室。
铜衬底层413一面紧贴钛密封防护层411,铜衬底层413另一面设置冷却水通道414,冷却室中的水带走高能质子束流轰击铍靶412所产生并传导到铜衬底层413上的热量,以保证铍靶412无损状态下长寿命工作。
实施例4:
如图1-图6所示,本实施例基于实施例1,慢化体组件42包括沿着质子运行方向依次相邻设置的高能段慢化体421、中能段慢化体422、低能段慢化体423和整形体424;
高能段慢化体421与靶组件41相向设置或接触;
所述整形体424为圆台结构,与准直器46的形状相配合,所述整形体424的大端与低能段慢化体423相邻设置,所述整形体424的小端与热中子吸收层45连接。
本实施例按快中子能量进行分段,分别设置高能段慢化体421、中能段慢化体422、低能段慢化体423和整形体424,使系统的慢化效率大大提高,提高了超热中子注量率。
示例性的:
高能段慢化体421的一个端面与靶组件41接触,另一端面紧贴中能段慢化体422安放,中能段慢化体422与低能段慢化体423相邻安放,低能段慢化体423与整形体424相邻安放。高能段慢化体421、中能段慢化体422、低能段慢化体423三者形成圆柱体状;整形体424为一个圆台形状,适配于第二反射体432和准直器46的结构。高能段慢化体421的材料为铅,高能段慢化体421对大于10MeV能量快中子慢化效果好,中能段慢化体422的材料为铁,对几MeV以下能量的快中子慢化作用更佳,低能段慢化体423的材料为铝,成多层块状,其材料也可是氟化铝、氟化锂、石墨等材料,其层块数量可增减,对几百keV能量的快中子慢化效果好。通过对低能段慢化体423材料类型和层块数量的更换,能够调节超热中子能量,以便调节治疗深度。整形体424为聚乙烯外壳包装的二氟化锂,它的另一面紧贴热中子吸收层45,热中子吸收层45的材料为镉,能有效对热中子进行吸收,减少辐射到被照射人体皮肤表面的热中子剂量,提高治疗安全性。
示例性的,本实施例所述超热中子产生系统的操作方法可以是:
医生根据癌症病人肿瘤位置,需要调整超热中子能量,并通过治疗计划确定所要更换低能段慢化体423的材料和层块的数量。操作人员通过控制中心发出自动更换慢化体组件42的指令,远端的控制器执行以下操作:使超热中子产生系统停机,移动滑台6执行分离移动指令:使负载第一反射体431的第一滑车61在滑轨63上沿着质子运行方向的反方向移动,远离支撑第二反射体432的第二滑车62,波纹管3处于收缩状态,直到慢化体组件42处于方便取出的状态和位置。同时,机器人8也接收到控制器发出的更换慢化体组件42的指令,完成以下操作:机器人8移动到合适的位置,其机身82转动到合适的方向,其机械手81断开慢化体组件42与第二反射体432之间的连接,取出旧的慢化体组件42,更换低能段慢化体423,把更换后的慢化体组件42连接第二反射体432上,使慢化体组件42和相关联部件处于正常工作状态和位置。移动滑台6执行组合移动指令,使第一滑车61负载第一反射体431沿着质子运行方向移动,与负载第二反射体432的第二滑车62合拢(连接),波纹管3处拉伸状态。靶组件41、慢化体组件42和反射体组件43及其相关部件都处于正常运行状态。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
需要注意的是,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。