马达
文献发布时间:2023-06-19 19:38:38
技术领域
本公开涉及一种马达。
背景技术
以往,已知一种具备用于供给电力的一对端子的马达(例如,参照专利文献1)。
一般来说,期望马达的端子数量较少。因此,在能够动态地切换旋转状态互不相同的多个动作模式的马达中,存在想要抑制用于动态地切换动作模式的端子的数量这样的需求。
现有技术文献
专利文献
专利文献1:国际公开第2020/008924号
发明内容
因此,本公开是能够动态地切换旋转状态互不相同的3种动作模式的马达。本公开的目的在于提供一种具备用于供给电力的一对端子以外的另一个端子的马达。
本公开的一个方式所涉及的马达具备:被输入单相交流的第一端子和第二端子;第三端子;AC/DC转换器,其与所述第一端子和所述第二端子连接,将所述单相交流转换为直流;逆变器,其通过脉宽调制信号(PWM信号)而被进行脉宽调制控制(PWM控制),由此将所述直流转换为三相交流;绕组,其被供给所述三相交流;转子,其通过所述绕组产生的磁场而进行旋转;控制部,其向所述逆变器输出所述PWM信号;以及检测电路,其与所述第三端子连接,其中,在所述第一端子和所述第二端子被输入所述单相交流的状态下,(1)在所述第三端子与所述第一端子短路的情况下,所述检测电路输出第一检测信号,(2)在所述第三端子与所述第二端子短路的情况下,所述检测电路输出第二检测信号,(3)在所述第三端子为开放状态的情况下,所述检测电路输出第三检测信号,所述控制部以在所述检测电路输出所述第一检测信号的情况下使所述转子成为第一旋转状态、在所述检测电路输出所述第二检测信号的情况下使所述转子成为第二旋转状态、在所述检测电路输出所述第三检测信号的情况下使所述转子成为第三旋转状态的方式输出所述PWM信号。
根据上述结构,能够提供一种能够动态地切换旋转状态互不相同的3种动作模式的、具备用于供给电力的一对端子以外的另一个端子的马达。
附图说明
图1是示出实施方式1所涉及的马达驱动系统的结构例的框图。
图2A是从单相交流电源供给的单相交流的波形图。
图2B是检测信号线的波形图。
图3A是从单相交流电源供给的单相交流的波形图。
图3B是第三端子与第二端子短路的状态下的、检测信号线的波形图。
图4A是从单相交流电源供给的单相交流的波形图。
图4B是第三端子为开放状态的情况下的、检测信号线的波形图。
图5是示出实施方式2所涉及的马达驱动系统的结构例的框图。
图6A是从单相交流电源供给的单相交流的波形图。
图6B是检测信号线的波形图。
图7A是从单相交流电源供给的单相交流的波形图。
图7B是第三端子与第二端子短路的状态下的、检测信号线的波形图。
图8是示出实施方式3所涉及的马达驱动系统的结构例的框图。
图9A是从单相交流电源供给的单相交流的波形图。
图9B是第三端子13为开放状态下的、检测信号线的波形图。
图10A是从单相交流电源供给的单相交流的波形图。
图10B是第三端子与第一端子短路的状态下的、检测信号线的波形图。
图11A是从单相交流电源供给的单相交流的波形图。
图11B是检测信号线的波形图。
具体实施方式
(获得本公开的一个方式的经过)
以往,在处理冷却状态的商品的冷链(cold chain)用途的冷却装置(例如,冷柜等)中利用马达。
在冷却装置中,为了实现风量的强弱切换动作、向除霜运转切换的切换动作等,需要动态地切换马达的动作模式。例如,风量的强弱切换动作通过动态地切换马达的旋转速度互不相同的动作模式来实现。另外,例如,向除霜运转切换的切换动作通过动态地切换马达的旋转方向互不相同的动作模式来实现。
另一方面,期望冷却装置中利用的马达的端子数量较少。
因此,发明人们对于在能够动态地切换互不相同的动作模式的马达中能够抑制用于供给电源的一对端子以外的端子的数量的结构专心地进行了实验、讨论。其结果,想到了下述马达。
本公开的一方式所涉及的马达具备:被输入单相交流的第一端子和第二端子;第三端子;AC(Alternating Current:交流)/DC(Direct Current:直流)转换器,其与所述第一端子和所述第二端子连接,将所述单相交流转换为直流;逆变器,其通过PWM(PulseWidth Modulation:脉宽调制)信号而被进行PWM控制,由此将所述直流转换为三相交流;绕组,其被供给所述三相交流;转子,其通过所述绕组产生的磁场而进行旋转;控制部,其向所述逆变器输出所述PWM信号;以及检测电路,其与所述第三端子连接,其中,在所述第一端子和所述第二端子被输入所述单相交流的状态下,(1)在所述第三端子与所述第一端子短路的情况下,所述检测电路输出第一检测信号,(2)在所述第三端子与所述第二端子短路的情况下,所述检测电路输出第二检测信号,(3)在所述第三端子为开放状态的情况下,所述检测电路输出第三检测信号,所述控制部以在所述检测电路输出所述第一检测信号的情况下使所述转子成为第一旋转状态、在所述检测电路输出所述第二检测信号的情况下使所述转子成为第二旋转状态、在所述检测电路输出所述第三检测信号的情况下使所述转子成为第三旋转状态的方式输出所述PWM信号。
根据上述结构的马达,(1)通过使第三端子为与第一端子短路的状态,来使转子成为第一旋转状态,(2)通过使第三端子为与第二端子短路的状态,来使转子成为第二旋转状态,(3)通过使第三端子为开放状态,来使转子成为第三旋转状态。这样,根据上述结构的马达,能够提供一种能够动态地切换旋转状态互不相同的3种动作模式的、具备用于供给电力的一对端子(也就是第一端子和第二端子)以外的另一个端子(也就是第三端子)的马达。
另外,也可以是,所述第一旋转状态、所述第二旋转状态以及所述第三旋转状态至少包括所述转子向第一旋转方向进行旋转的旋转状态、以及所述转子向与所述第一旋转方向相反的第二旋转方向进行旋转的旋转状态。
由此,上述结构的马达能够以转子的旋转方向彼此相反的动作模式进行动作。
也可以还具备:存储部,其存储用于规定所述PWM信号的波形的PWM信息;更新部,其更新所述PWM信息;以及操作受理部,其受理来自所述马达的用户的操作,所述控制部基于所述PWM信息来输出所述PWM信号,所述更新部基于由所述操作受理部受理到的来自所述用户的操作来更新所述PWM信息。
由此,上述结构的马达能够以由用户设定的动作模式进行动作。
以下,参照附图来说明本公开的一个方式所涉及的马达的具体例。这里所示的实施方式均示出本公开的一个具体例。因而,以下的实施方式中示出的数值、形状、构成要素、构成要素的配置及连接方式、以及步骤(工序)及步骤的顺序等为一例,不是旨在限定本公开。另外,各图是示意图,未必严格地进行了图示。
此外,本公开的概括性的或具体的方式可以通过系统、方法、集成电路、计算机程序或者计算机可读的CD-ROM(Compact Disk Read Only Memory:光盘只读存储器)等记录介质来实现,也可以通过系统、方法、集成电路、计算机程序以及记录介质的任意的组合来实现。
(实施方式1)
<结构>
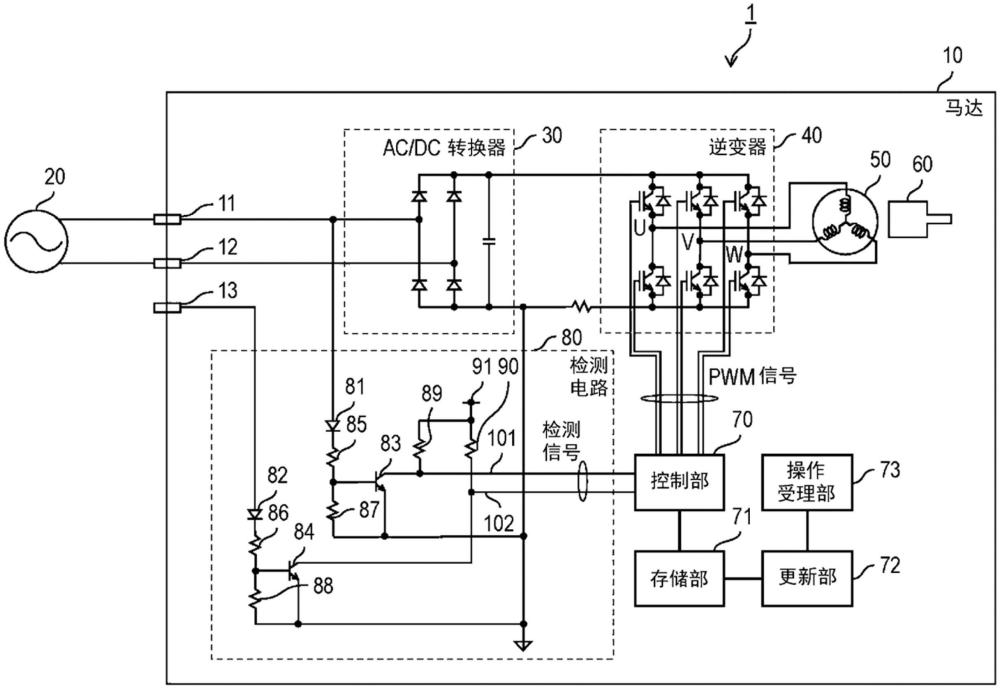
图1是示出实施方式1所涉及的马达驱动系统1的结构例的框图。
如图1所示,马达驱动系统1具备马达10和单相交流电源20。
单相交流电源20向马达10供给单相交流。单相交流电源20供给的单相交流例如是有效电压为100V、频率为60Hz的单相交流。单相交流电源20例如可以是商用电源。
马达10将由单相交流电源20供给的单相交流作为电力源而进行驱动。马达10例如可以是感应电动机。
如图1所示,马达10具备第一端子11、第二端子12、第三端子13、AC/DC转换器30、逆变器40、绕组50、转子60、控制部70、存储部71、更新部72、操作受理部73以及检测电路80。
第一端子11和第二端子12是被输入从单相交流电源20供给的单相交流的端子,与AC/DC转换器30连接。
第三端子13是会变为(1)与第一端子11短路的状态、(2)与第二端子12短路的状态、或者(3)开放状态的端子,第三端子13与检测电路80连接。第三端子13也可以变为这些状态以外的状态。第三端子13例如也可以通过在马达10的外部连接的继电器(未图示)来选择性地实现这些状态。
第一端子11、第二端子12以及第三端子13分别由具有导电性的材质来实现。第一端子11、第二端子12以及第三端子13例如可以分别由金属制的连接器来实现,也可以分别由引线来实现。
AC/DC转换器30将由单相交流电源20供给的单相交流转换为直流。更具体而言,AC/DC转换器30具备一个以上的二极管(这里为4个二极管)以及一个以上的电容器(这里为一个电容器),由一个以上的二极管对单相交流进行整流,并由一个以上的电容器使进行整流所得到的脉动电流平滑化,由此将单相交流转换为直流。
逆变器40通过PWM(Pulse Width Modulation:脉宽调制)信号而被进行PWM控制,由此将通过AC/DC转换器30进行转换所得到的直流转换为三相交流。更具体而言,逆变器40具备进行开关动作的多个开关元件(这里为6个开关元件),这些多个开关元件通过从后述的控制部70输出的PWM信号而被进行PWM控制,由此逆变器40将通过AC/DC转换器30进行转换所得到的直流转换为由U相、V相以及W相构成的三相交流。
绕组50被供给通过由逆变器40进行变换所得到的三相交流,来产生使转子60旋转的磁场。更具体而言,绕组50具备被相互进行了Y连接的、与U相连接的线圈、与V相连接的线圈以及与W相连接的线圈。通过改变在这三个线圈中流动的电流,能够产生使转子60旋转的磁场。绕组50例如也可以是Δ连接。
转子60通过绕组50产生的磁场而进行旋转。转子60能够以旋转轴为中心向第一旋转方向和与第一旋转方向相反的第二旋转方向中的任一旋转方向旋转。转子60的旋转速度和旋转方向根据绕组50产生的磁场而变化。即,转子60的旋转速度和旋转方向根据通过逆变器40进行转换所得到的三相交流而变化。
在第一端子11和第二端子12被输入单相交流的状态下,(1)在第三端子13与第一端子11短路的情况下,检测电路80输出第一检测信号,(2)在第三端子13与第二端子12短路的情况下,检测电路80输出第二检测信号,(3)在第三端子13为开放状态的情况下,检测电路80输出第三检测信号。
以下,参照附图来说明检测电路80的具体的电路结构例。
如图1所示,检测电路80具备二极管81、二极管82、NPN型晶体管83(以下,也简称为晶体管83)、NPN型晶体管84(以下,也简称为晶体管84)、电阻元件85、电阻元件86、电阻元件87、电阻元件88、电阻元件89、电阻元件90、控制电源91、检测信号线101以及检测信号线102。
二极管81其阳极与第一端子11连接,二极管81对从单相交流电源20输入到第一端子11的单相交流进行整流。
电阻元件85和电阻元件87串联地连接于二极管81的阴极与地之间,用于对二极管81的阴极的电位进行分压。
控制电源91供给用于将检测信号线101和检测信号线102上拉的电位。这里,作为一例,电位为5V。控制电源91例如也可以具备DC/DC转换器(未图示),并且由DC/DC转换器对通过AC/DC转换器30进行转换所得到的直流的电位进行转换,由此供给电位。
电阻元件89与控制电源91和检测信号线101连接,将检测信号线101上拉至控制电位。
晶体管83为开集输出,晶体管83的基极和发射极分别与电阻元件87的一方的端子和另一方的端子连接,晶体管83的集电极与检测信号线101连接。在电阻元件87的一方的端子与另一方的端子之间的电位差、即二极管81的阳极的电位的分压电位大于阈值(例如,0.6V)的情况下,晶体管83使检测信号线101与地之间为导通状态,在该分压电位小于阈值的情况下,晶体管83使检测信号线101与地之间为非导通状态。
这里,导通状态的晶体管83的电阻值为相比于电阻元件89的电阻值而言足够小的值。因此,在晶体管83为导通状态的情况下,检测信号线101的电位实质上变为地电位(即,实质上变为0V)。因而,在晶体管83为截止状态的情况下,检测信号线101的电位变为通过电阻元件89而上拉到的电位,在晶体管83为导通状态的情况下,检测信号线101的电位实质上变为地电位。
因而,在通过二极管81进行整流而得到的脉动电流的分压电位小于阈值的情况下,检测信号线101的电位变为高电平(即,控制电位),在该脉动电流的分压电位大于阈值的情况下,检测信号线101的电位变为低电平(即,实质上变为地电位)。
图2A是从单相交流电源20供给的单相交流的波形图。图2B是检测信号线101的波形图。
如图2B所示,检测信号线101的电位为以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号。
二极管82是与二极管81同样的元件。二极管82其阳极与第三端子13连接,(1)在第三端子13为与第一端子11短路的状态的情况下,二极管82对从单相交流电源20输入到第一端子11的单相交流进行整流,(2)在第三端子13为与第二端子12短路的状态的情况下,二极管82对从单相交流电源20输入到第二端子12的单相交流进行整流。
电阻元件86和电阻元件88是分别与电阻元件85和电阻元件87同样的元件。电阻元件86和电阻元件88串联地连接于二极管81的阴极,用于对二极管81的阴极的电位进行分压。
电阻元件90是与电阻元件89同样的元件。电阻元件90与控制电源91和检测信号线102连接,将检测信号线102上拉至控制电位。
晶体管84是与晶体管83同样的元件。晶体管84为开集输出,晶体管84的基极和发射极分别与电阻元件88的一方的端子和另一方的端子连接,晶体管84的集电极与检测信号线102连接。在电阻元件88的一方的端子与电阻元件88的另一方的端子之间的电位差、即二极管82的阳极的电位的分压电位大于阈值(例如,0.6V)的情况下,晶体管84使检测信号线102与地之间为导通状态,在该分压电位小于阈值的情况下,晶体管84使检测信号线102与地之间为非导通状态。
这里,导通状态的晶体管84的电阻值为相比于电阻元件90的电阻值而言足够小的值。因此,在晶体管84为导通状态的情况下,检测信号线102的电位实质上变为地电位(即,实质上变为0V)。因而,在晶体管84为截止状态的情况下,检测信号线102的电位变为控制电位,在晶体管84为导通状态的情况下,检测信号线102的电位实质上变为地电位。
因而,在通过二极管82进行整流所得到的脉动电流的分压电位小于阈值的情况下,检测信号线102的电位变为高电平(即,控制电位),在该脉动电流的分压电位大于阈值的情况下,检测信号线102的电位变为低电平(即,实质上为地电位)。
在第三端子13为与第一端子11短路的状态下,检测信号线102的电位变为与检测信号线101的电位同样的、以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号。这是因为由于第三端子13与第一端子11短路而二极管82的阴极的电位变为与二极管81的阴极的电位同样的电位。
因而,第三端子13为与第一端子11短路的状态的情况下的、检测信号线102的电位变为与检测信号线101的电位同样的波形。因此,图2B也是第三端子13为与第一端子11短路的状态的情况下的、检测信号线102的波形图。
图3A是从单相交流电源20供给的单相交流的波形图。图3B是第三端子13与第二端子12短路的状态下的、检测信号线102的波形图。
如图3B所示,在第三端子13与第二端子12短路的状态下,检测信号线102的电位变为相位与检测信号线101的电位的相位相反的以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号。这是因为由于第三端子13与第二端子12短路而二极管82的阴极的电位变为相位与二极管81的阴极的电位的相位相反的电位。
图4A是从单相交流电源20供给的单相交流的波形图。图4B是第三端子13为开放状态的情况下的、检测信号线102的波形图。
如图4B所示,在第三端子13为开放状态的情况下,检测信号线102的电位变为保持高电平而不变化的信号。这是因为第三端子13为开放状态。这是因为由于电阻元件88的一方的端子和电阻元件88的另一方的端子均变为地电位从而电阻元件88的一方的端子与电阻元件88的另一方的端子变为相同电位使得晶体管84保持截止状态而不变化。
检测电路80通过上述结构从检测信号线101和检测信号线102这两条检测信号线输出第一检测信号、第二检测信号以及第三检测信号。这里,第一检测信号具体而言是检测信号线101和检测信号线102为彼此相同相位的、以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号。第二检测信号具体而言是检测信号线101和检测信号线102为相位彼此相反的以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号。第三检测信号具体而言是检测信号线101变为以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号、且检测信号线102变为保持高电平而不变化的信号。
再次回到图1,继续说明马达10。
控制部70向逆变器40输出PWM信号。更具体而言,控制部70以在检测电路80输出第一检测信号的情况下使转子60成为第一旋转状态、在检测电路80输出第二检测信号的情况下使转子60成为第二旋转状态、在检测电路80输出第三检测信号的情况下使转子60成为第三旋转状态的方式输出PWM信号。
这里,关于第一旋转状态、第二旋转状态以及第三旋转状态,只要转子60的旋转状态互不相同,则可以是任何转子60的旋转状态。例如,也可以是,第一旋转状态是转子60向第一旋转方向以第一旋转速度进行旋转的状态,第二旋转状态是转子60向第一旋转方向以比第一旋转速度快的第二旋转速度进行旋转的状态,第三旋转状态是转子60向与第一旋转方向相反的第二旋转方向进行旋转的状态。另外,例如,也可以是,第一旋转状态是转子60向第一旋转方向以第一旋转速度进行旋转的状态,第二旋转状态是转子60向第一旋转方向以比第一旋转速度快的第二旋转速度进行旋转的状态,第三旋转状态是转子60向第一旋转方向以比第二旋转速度快的第三旋转速度进行旋转的状态。控制部70例如也可以通过由内置于马达10的微计算机(未图示)执行内置于马达10的存储器(未图示)中存储的程序来实现。
存储部71存储用于规定控制部70输出的PWM信号的波形的PWM信息。即,控制部70基于存储部71存储的PWM信息来输出PWM信号。存储部71例如也可以通过内置于马达10的存储器(未图示)来实现。
操作受理部73受理来自利用马达驱动系统1的用户的操作。操作受理部73受理的操作包括用于更新PWM信号的操作。操作受理部73例如也可以通过触摸面板、键盘、开关等来实现。另外,也可以是,操作受理部73例如包括能够与外部设备(例如,个人计算机)进行通信的接口电路,通过从外部设备接收由外部设备生成的、基于由用户进行的用于更新PWM信号的操作的信号,来受理来自用户的操作。
更新部72基于由操作受理部73受理到的来自用户的操作,来更新存储部71存储的PWM信号。更新部72例如也可以通过由内置于马达10的微计算机(未图示)执行内置于马达10的存储器(未图示)中存储的程序来实现。
如上所述,本实施方式的马达10具备:被输入单相交流的第一端子11和第二端子12;第三端子13;AC/DC转换器30,其与第一端子11和第二端子12连接,将单相交流转换为直流;逆变器40,其通过脉宽调制信号(PWM信号)而被进行脉宽调制控制(PWM控制),由此将直流转换为三相交流;绕组50,其被供给三相交流;转子60,其通过绕组50产生的磁场而进行旋转;控制部70,其向逆变器输出PWM信号;以及检测电路80,其与第三端子连接,其中,在第一端子11和第二端子12被输入单相交流的状态下,(1)在第三端子13与第一端子11短路的情况下,检测电路80输出第一检测信号,(2)在第三端子13与第二端子12短路的情况下,检测电路80输出第二检测信号,(3)在第三端子13为开放状态的情况下,检测电路80输出第三检测信号,控制部70以在检测电路80输出第一检测信号的情况下使转子60成为第一旋转状态、在检测电路80输出第二检测信号的情况下使转子60成为第二旋转状态、在检测电路80输出第三检测信号的情况下使转子60成为第三旋转状态的方式输出PWM信号。
由此,能够提供一种能够动态地切换旋转状态互不相同的3种动作模式的、具备用于供给电力的一对端子以外的另一个端子的马达。
另外,也可以是,马达10还具备:存储部71,其存储用于规定PWM信号的波形的PWM信息;更新部72,其更新PWM信息;以及操作受理部73,其受理来自马达10的用户的操作,控制部70基于PWM信息来输出PWM信号,更新部72基于由操作受理部73受理到的来自用户的操作来更新PWM信息。
<考察>
根据上述结构的马达10,(1)通过使第三端子13为与第一端子11短路的状态,来使转子60成为第一旋转状态,(2)通过使第三端子13为与第二端子12短路的状态,来使转子60成为第二旋转状态,(3)通过使第三端子13为开放状态,来使转子60成为第三旋转状态。这样,根据马达10,能够提供一种能够动态地切换旋转状态互不相同的3种动作模式的、具备用于供给电力的一对端子(也就是第一端子11和第二端子12)以外的另一个端子(也就是第三端子13)的马达。
第一旋转状态、第二旋转状态以及第三旋转状态至少包括转子60向第一旋转方向进行旋转的旋转状态、以及转子60向与第一旋转方向相反的第二旋转方向进行旋转的旋转状态,由此马达10能够以转子60的旋转方向彼此相反的动作模式进行动作。
马达10能够以通过利用马达驱动系统1的用户对操作受理部73的操作而设定的动作模式进行动作。
(实施方式2)
以下,说明变更实施方式1所涉及的马达驱动系统1的一部分而构成的实施方式2所涉及的马达驱动系统。
以下,关于实施方式2所涉及的马达驱动系统,对于与实施方式1所涉及的马达驱动系统1的构成要素同样的构成要素,视为已经对其进行了说明而标注相同的附图标记并省略其详细说明,以与马达驱动系统1的不同点为中心来进行说明。
图5是示出实施方式2所涉及的马达驱动系统1A的结构例的框图。
如图5所示,马达驱动系统1A构成为,相对于实施方式1所涉及的马达驱动系统1而言,实施方式1所涉及的马达10被变更为马达10A。
如图5所示,马达10A构成为,相对于实施方式1所涉及的马达10而言,实施方式1所涉及的检测电路80被变更为检测电路80A。以下,以检测电路80A为中心来进行说明。
如图5所示,检测电路80A相对于实施方式1所涉及的检测电路80而言,实施方式1所涉及的电阻元件89被变更为电阻元件89A和电阻元件89B。实施方式1所涉及的检测信号线101被变更为检测信号线101A。构成为追加了二极管92、二极管93以及检测信号线103。
电阻元件89A和电阻元件89B串联地连接于控制电源91与地之间,用于对控制电位进行分压。这里,作为一例,电阻元件89A的电阻值与电阻元件89B的电阻值相等。因此,进行分压所得到的电位(以下,也称为“分压电位”)为2.5V。
另外,电阻元件89A与电阻元件89B的连接点还与检测信号线101A连接。因此,电阻元件89A和电阻元件89B将检测信号线101A转换为分压电位。
因而,在通过二极管81进行整流所得到的脉动电流的分压电位小于阈值的情况下,检测信号线101A的电位变为中间电平(即,分压电位),在该脉动电流的分压电位大于阈值的情况下,检测信号线101A的电位变为低电平(即,大致为地电位)。
图6A是从单相交流电源20供给的单相交流的波形图。图6B是检测信号线101A的波形图。
如图6B所示,检测信号线101A的电位为以与单相交流的周期相同的周期交替地重复中间电平和低电平的脉冲信号。
二极管92其阳极与检测信号线101A连接,阴极与检测信号线103连接。二极管93其阳极与检测信号线102连接,阴极与检测信号线103连接。即,二极管92和二极管93以阳极彼此连接的方式并联连接。
像这样并联连接的二极管92和二极管93作为以检测信号线101A和检测信号线102为输入且以检测信号线103为输出的线或(wired-OR)电路来发挥功能。即,二极管92和二极管93将检测信号线101A的电位和检测信号线102的电位中的、不小的电位输出到检测信号线103。
如在实施方式1中前述的那样,第三端子13为与第一端子11短路的状态的情况下的检测信号线102的电位变为图2B所示的以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号。因此,第三端子13为与第一端子11短路的状态下的检测信号线103的电位变为图6B所示的以与单相交流的周期相同的周期交替地重复中间电平和低电平的脉冲信号以及图2B所示的以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号中的、不小的电位。因而,第三端子13为与第一端子11短路的状态的情况下的检测信号线103的电位变为图2B所示的以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号。因此,图2B在实施方式2中也是第三端子13与第一端子11短路的状态下的检测信号线102的波形图。
如在实施方式1中前述的那样,第三端子13与第二端子12短路的状态下的检测信号线102的电位变为图3B所示的相位与检测信号线101A的电位的相位相反的以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号。因此,第三端子13与第二端子12短路的状态下的检测信号线103的电位变为图6B所示的以与单相交流的周期相同的周期交替地重复中间电平和低电平的脉冲信号以及图3B所示的相位与检测信号线101A的电位的相位相反的以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号中的、不小的电位。因而,第三端子13与第一端子11短路的状态下的检测信号线103的电位变为相位与检测信号线101A的电位的相位相反的以与单相交流的周期相同的周期交替地重复高电平和中间电平的脉冲信号。
图7A是从单相交流电源20供给的单相交流的波形图。图7B是第三端子13与第二端子12短路的状态下的、检测信号线103的波形图。
如在实施方式1中前述的那样,第三端子13为开放状态的情况下的检测信号线102的电位变为图4B所示的保持高电平而不变化的信号。因此,第三端子13为开放状态下的检测信号线103的电位变为图6B所示的以与单相交流的周期相同的周期交替地重复中间电平和低电平的脉冲信号以及图4B所示的保持高电平而不变化的信号中的、不小的电位。因而,第三端子13为开放状态的情况下的检测信号线103的电位变为图4B所示的保持高电平而不变化的信号。因此,图4B在实施方式2中也是第三端子13为开放状态的情况下的检测信号线103的波形图。
检测电路80A通过上述结构从1条检测信号线103输出第一检测信号、第二检测信号以及第三检测信号。这里,第一检测信号具体而言是以与单相交流的周期相同的周期交替地重复高电平和低电平的脉冲信号。第二检测信号具体而言是相位与第一检测信号的相位相反的以与单相交流的周期相同的周期交替地重复高电平和中间电平的脉冲信号。另外,第三检测信号具体而言是检测信号线103保持高电平而不变化的信号。
<考察>
根据上述结构的马达10A,能够提供一种与实施方式1所涉及的马达10同样地能够动态地切换旋转状态互不相同的3种动作模式的、具备用于供给电力的一对端子以外的另一个端子的马达。
马达10A与实施方式1所涉及的马达10同样地能够以转子60的旋转方向彼此相反的动作模式进行动作。
马达10A与实施方式1所涉及的马达10同样地能够以通过利用马达驱动系统1A的用户对操作受理部73的操作而设定的动作模式进行动作。
(实施方式3)
以下,说明变更实施方式1所涉及的马达驱动系统1的一部分而构成的实施方式3所涉及的马达驱动系统。
以下,关于实施方式3所涉及的马达驱动系统,对于与实施方式1所涉及的马达驱动系统1的构成要素同样的构成要素,视为已经对其进行了说明而标注相同的附图标记并省略其详细说明,以与马达驱动系统1的不同点为中心来进行说明。
图8是示出实施方式3所涉及的马达驱动系统1B的结构例的框图。
如图8所示,马达驱动系统1B构成为,相对于实施方式1所涉及的马达驱动系统1而言,实施方式1所涉及的马达10被变更为马达10B。
如图8所示,马达10B构成为,相对于实施方式1所涉及的马达10而言,实施方式1所涉及的检测电路80被变更为检测电路80B。以下,以检测电路80B为中心来进行说明。
如图8所示,检测电路80B具备控制电源91、二极管111、二极管112、二极管113、二极管114、电阻元件115、电阻元件116、电阻元件117以及检测信号线120。
二极管111其阳极与第一端子11连接,二极管111对从单相交流电源20输入到第一端子11的单相交流进行整流。
二极管112是与二极管111同样的元件。二极管112其阳极与第三端子13连接,(1)在第三端子13与第一端子11短路的情况下,二极管112对从单相交流电源20输入到第一端子11的单相交流进行整流,(2)在第三端子13与第二端子12短路的情况下,二极管112对从单相交流电源20输入到第二端子12的单相交流进行整流。
电阻元件115的一方的端子与二极管111的阴极连接,另一方的端子与检测信号线120连接。
电阻元件116是与电阻元件115同样的元件。电阻元件116的一方的端子与二极管112的阴极连接,另一方的端子与检测信号线120连接。即,电阻元件115和电阻元件116以另一方的端子彼此连接的方式并联连接。
电阻元件117的一方的端子与检测信号线120连接,另一方的端子接地。即,电阻元件115和电阻元件117串联地连接于二极管111的阴极与地之间。因此,电阻元件115和电阻元件117对二极管111的阴极的电位进行分压。另外,电阻元件116和电阻元件117串联地连接于二极管112的阴极与接之间。因此,电阻元件116和电阻元件117对二极管112的阴极的电位进行分压。因而,检测信号线120的电位为将(1)由电阻元件115和电阻元件117进行分压所得到的二极管111的阴极的电位与(2)由电阻元件116和电阻元件117进行分压所得到的二极管112的阴极的电位合成而得到的电位。
图9A是从单相交流电源20供给的单相交流的波形图。图9B是第三端子13为开放状态下的、检测信号线120的波形图。
在第三端子13为开放状态的情况下,检测信号线120的电位为由电阻元件115和电阻元件117进行分压所得到的二极管111的阴极的电位本身。
因而,在第三端子13为开放状态下,检测信号线120的电位如图9所示那样为通过电阻元件115和电阻元件117对由二极管111进行半波整流而得到的脉动电流的电位进行分压所得到的电位。即,第三端子13为开放状态下的检测信号线120的信号为以与单相交流相同的周期进行脉动的脉动电流。
图10A是从单相交流电源20供给的单相交流的波形图。图10B是第三端子13与第一端子11短路的状态下的、检测信号线120的波形图。
在第三端子13与第一端子11短路的状态下,二极管111和二极管112双方对从单相交流电源20输入到第一端子11的单相交流进行整流。因此,由二极管111进行半波整流而得到的脉动电流的相位与由二极管112进行半波整流而得到的脉动电流的相位相同。
因而,在第三端子13与第一端子11短路的状态下,检测信号线120的电位如图10A和图10B所示那样变为将(1)通过电阻元件115和电阻元件117对由二极管111进行半波整流而得到的脉动电流的电位进行分压所得到的电位与(2)通过电阻元件116和电阻元件117对由二极管112进行半波整流而得到的脉动电流的电位进行分压所得到的电位以相同相位进行叠加而得到的电位。即,第三端子13为与第一端子11连接的状态的情况下的检测信号线120的信号变为以与单相交流相同的周期进行脉动的脉动电流。
如图9A、图9B、图10A以及图10B所示,第三端子13与第一端子11短路的状态下的检测信号线120的峰值电位(以下也称为“高峰值电位”)高于第三端子13为开放状态下的检测信号线120的峰值电位(以下也称为“中间峰值电位”)。
在第三端子13与第二端子12短路的状态下,二极管111对从单相交流电源20输入到第一端子11的单相交流进行整流。而且,二极管112对从单相交流电源20输入到第二端子12的单相交流进行整流。因此,由二极管111进行半波整流而得到的脉动电流的相位与由二极管112进行半波整流而得到的脉动电流的相位彼此相反。
因而,在第三端子13与第二端子12短路的状态下,如图11A和图11B所示,检测信号线120的电位变为将(1)通过电阻元件115和电阻元件117对由二极管111进行半波整流而得到的脉动电流的电位进行分压所得到的电位与(2)通过电阻元件116和电阻元件117对由二极管112进行半波整流而得到的脉动电流的电位进行分压所得到的电位以彼此相反的相位进行叠加而得到的电位。图11A是从单相交流电源20供给的单相交流的波形图。图11B是检测信号线120的波形图。即,第三端子13与第二端子12连接的状态下的检测信号线120的信号为以单相交流的2倍的周期进行脉动的脉动电流。
检测电路80B通过上述结构从1条检测信号线120输出第一检测信号、第二检测信号以及第三检测信号。这里,第一检测信号具体而言是以与单相交流的周期相同的周期进行脉动且峰值电位为高峰值电位的脉动电流信号。另外,第二检测信号具体而言是以单相交流的周期的2倍的周期进行脉动的脉动电流信号。另外,第三检测信号具体而言是以与单相交流的周期相同的周期进行脉动且峰值电位为中间峰值电位的脉动电流信号。
<考察>
根据上述结构的马达10B,能够提供一种与实施方式1所涉及的马达10同样地能够动态地切换旋转状态互不相同的3种动作模式的、具备用于供给电力的一对端子以外的另一个端子的马达。
马达10B与实施方式1所涉及的马达10同样地能够以转子60的旋转方向彼此相反的动作模式进行动作。
马达10B与实施方式1所涉及的马达10同样地能够以通过利用马达驱动系统1B的用户对操作受理部73的操作而设定的动作模式进行动作。
(其它实施方式)
以上,基于实施方式1、实施方式2以及实施方式3说明了本公开的一个方式所涉及的马达驱动装置,但是本公开不限定于这些实施方式。在不脱离本公开的主旨的范围内对这些实施方式施加本领域技术人员想到的各种变形而得到的方式、或者将不同的实施方式中的构成要素组合而构建的方式也能够包括在本公开的一个或多个方式的范围内。
产业上的可利用性
本公开能够被广泛地应用于马达。
附图标记说明
1、1A、1B:马达驱动系统;10、10A、10B:马达;20:单相交流电源;11:第一端子;12:第二端子;13:第三端子;30:AC/DC转换器;40:逆变器;50:绕组;60:转子;70:控制部;71:存储部;72:更新部;73:操作受理部;80、80A、80B:检测电路;81、82、92、93、111、112、113、114:二极管;83、84:NPN型晶体管(晶体管);85、86、87、88、89、89A、89B、90、115、116、117:电阻元件;91:控制电源;101、101A、102、103、120:检测信号线。
- 三相马达控制电路和三相马达控制方法
- 交流马达测试装置与交流马达测试方法
- 振动波马达和使用振动波马达的电子设备
- 马达控制方法、马达的控制模型的变换方法、马达控制系统、马达的控制模型的变换系统以及马达的控制模型的变换程序
- 马达端子、具有该马达端子的马达端子组件以及使用该马达端子组件组装马达的方法