一种用于悬浮纳米微粒的真空光镊系统
文献发布时间:2024-01-17 01:15:20
技术领域
本发明属于真空光镊领域,具体涉及一种用于悬浮纳米微粒的真空光镊系统。
背景技术
真空光镊,也称真空光阱,是光镊技术在真空环境中的发展而来的一种技术,即利用聚焦激光构建光镊系统在真空环境下悬浮微纳尺寸的微粒,将其束缚在焦点附近区域,形成敏感外场信息的谐振子。此类真空光镊系统中的谐振子不仅能够摆脱机械固连,规避传统谐振子的机械耗散问题,也能通过真空环境实现与外界热环境的良好隔离,极大地降低谐振子的热噪声水平,同时具有高灵敏度、高可靠性且易于集成等优点,因此在小型化和高精度的极弱力和加速度测量以及基础物理研究领域具有独特的优势。
近几年真空光镊面向惯性导航等重点领域应用需求的高精度加速度计和极弱力测量已经形成了较为成熟的技术路线,可为深空深地探测、大型舰船导航以及其他自主导航领域提供新的技术手段。目前,在实验室环境中,室温下真空光镊传感系统已经实现了10
真空光镊系统中的直接探测量是俘获在光镊中心微球的位移量,加速度等力学传感量都由微球的位移量标定而来。微球所处环境中的热噪声是位移探测的主要噪声来源,而热噪声由真空度(压强P)表征。研究表明,真空度越高,最小可探测量越小,测量精度越高。以加速度传感为例,最小可测加速度的值与P
现有技术中存在很多真空光镊系统的实际应用,例如专利CN114414905B,公开一种基于悬浮微粒测量电场的方法及装置,是利用真空光镊系统进行电场测量;专利CN114826851B,公开一种基于悬浮微粒的信号通讯方法和装置,是利用真空光镊系统进行信号通讯;专利CN111913230B,公开一种基于真空光镊的绝对重力仪和测量方法,是利用真空光镊系统进行重力测量;专利CN109814165B,公开一种光力冷却小型化高精度光学重力仪。这些系统中,真空度是提升这类仪器性能的关键。
真空光镊实验中一般利用真空腔体给被激光捕获的微粒提供真空环境。利用真空泵对腔体进行抽气能够提升或维持腔体的真空度。研究表明真空度越高,基于真空光镊的精密传感系统的灵敏度越好,介观物体的量子基态冷却也越容易实现。因此改善真空光镊系统设计来提高实验系统的真空度一直是真空光镊系统亟需解决的难题,该问题的解决将进一步提升基于真空光镊的精密传感系统的灵敏度指标,同时也将推动宏观量子态等基础物理研究快速发展。
目前有报道的真空光镊系统的极限真空度为5e-9mbar量级(FundamentalResearch 3, 57-62, 2023; https://doi.org/10.1038/s41567-023-01956-1),由于生成真空光阱的镜组工作距离短,且无法校正厚腔镜产生的像差,所以真空光镊系统所需的真空光阱生成模块和信号收集模块中包含的光路器件均放置在真空腔内,如图1所示,这导致现有方案有两个缺点:
1、腔体体积大,内部表面积大,腔体放弃量高,另外真空光阱生成模块和信号收集模块中的器件放气率也很高,所以真空泵设备很难将气压往下抽,腔体极限真空受限,目前只能达到5e-9mbar;
2、腔体积大,重量大,是真空光镊系统中最为笨重的部分,严重限制了真空光镊系统的小型化发展,不利于系统未来的集成化应用。
简单的将真空光阱生成模块和信号收集模块放置在真空腔外虽然可以解决上述两个缺点,但厚腔镜引入的像差会使光阱剧烈恶化,导致无法捕获纳米粒子。也有科学家尝试过将真空光阱生成模块和信号收集模块放置在真空腔外的方案,为了避免腔镜引入的像差,其窗口厚度只有150μm,太薄无法承载高真空,他们达到的极限真空只有1e-3mbar(Optics Letters 40(20), 4751-4754, 2015)。
发明内容
针对现有的真空腔体极限真空度低,真空腔体体积庞大的问题,本发明将原有真空腔体内部的真空光阱生成模块和信号收集模块全部放到真空腔体外,并且设计真空光阱生成模块具有可调节功能,通过移动真空光阱生成模块中的某一光学镜组可校正真空腔镜引入的像差,并选择合适的真空腔镜的厚度,在大幅提升装置的极限真空度的同时,减小真空腔体的体积,满足未来的集成化应用需求。
本发明的目的通过如下的技术方案来实现:
一种用于悬浮纳米微粒的真空光镊系统,包括真空光阱生成模块、真空腔模块、信号收集模块和起支模块;
所述真空光阱生成模块和信号收集模块均位于所述真空腔模块的外部,且分别位于真空腔模块沿光路的两侧;所述真空光阱生成模块由多个透镜组合而成,其焦距可调节,用于补偿腔镜引入的像差,保证准直光束在真空腔内发生紧聚焦,且焦点无像差;
所述真空腔模块包括真空腔体,设置在所述真空腔体两侧的前腔镜和后腔镜,以及放气阀;所述放气阀用于微粒起支和破空;
所述真空光阱生成模块、真空腔模块、信号收集模块满足如下条件:
所述真空光阱生成模块的工作距离>前腔镜的光学厚度,从而保证安装在真空腔模块外的真空光阱生成模块的紧聚焦焦点处于真空腔体内部;
所述前腔镜的光学厚度、后腔镜的光学厚度,加上前腔镜、后腔镜之间的间距,三者之和,小于所述真空光阱生成模块的工作距离与所述信号收集模块的工作距离之和;
所述起支模块包括起支容器、雾化器、连接管道,所述雾化器用于将微粒雾化,所述连接管道用于起支时连接所述起支容器和放气阀;通过起支容器和真空腔模块的压力差将雾化后的微粒输入到真空腔体中,完成微粒捕获。
进一步地,所述真空光阱生成模块为带有校正环的显微物镜。
进一步地,所述前腔镜和后腔镜采用微晶玻璃材质,且表面镀有对应波长激光的增透膜。
进一步地,所述真空腔模块的真空腔体上设置有真空规接口、真空泵组接口;所述真空规接口用于连接真空规,测量真空腔内的真空度;所述真空泵组接口用于连接带有阀门的真空泵组,从而抽真空。
进一步地,还包括光源模块,用于产生设定波长的激光,并对光束进行扩束和准直。
进一步地,所述光源模块包括激光器、第一平凸透镜、第二平凸透镜、第一反射镜、第二反射镜,所述激光器产生用于捕获微粒的激光,出射激光通过第一平凸透镜和第二平凸透镜组成的扩束系统扩束,之后利用第一反射镜和第二反射镜调节光束方向射入后方的真空光阱生成模块。
进一步地,所述信号收集模块包括收集透镜、聚束透镜和四象限探测器,微粒的散射光经过所述收集透镜收集后经由聚束透镜聚束,照射在四象限探测器上,完成微粒运动信号的探测与采集。
进一步地,所述起支模块的连接管道内径与所述放气阀的内径相当。
进一步地,所述起支模块的连接管道的材料为透明树脂,所述连接管道起支时通过采用O圈密封方式与放气阀相连,方便连接和拆卸。
进一步地,所述起支模块的具体起支方法为:起支时,利用连接管道连接起支容器和真空腔模块的放气阀,将真空腔模块内的真空抽至低真空环境;打开雾化器使雾化微粒充满起支容器,之后关闭雾化器,缓慢打开放气阀,通过内外压差将雾化微粒压入真空腔体中,完成起支;捕获成功后,关闭放气阀,移开起支模块。
本发明的有益效果如下:
(1)本发明的真空腔的体积不再受限于腔内光路器件,可以做到很小,具有小型化和集成化的优势。
(2)真空腔体内部无光路器件,放气源大幅度减少,可大幅度提升腔体所能达到的极限真空度,极限真空度可达10
(3)本发明可应用于现有的真空光镊系统中。在真空光镊系统里,真空腔体作为系统体积最为庞大的一环,其体积的显著降低有利于系统在集成芯片等其他小型化设备上的应用。另外腔体极限真空度的提高不仅能够大幅提升真空光镊在传感测量领域内的灵敏度指标,而且有利于纳米微球的量子基态冷却。
附图说明
下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本申请相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本申请的一些方面相一致的装置和方法的例子。
附图中所示的方框图仅仅是功能实体,不一定必须与物理上独立的实体相对应。即,可以采用软件形式来实现这些功能实体,或在一个或多个硬件模块或集成电路中实现这些功能实体,或在不同网络和/或处理器装置和/或微控制器装置中实现这些功能实体。
附图中所示的流程图仅是示例性说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解,而有的操作/步骤可以合并或部分合并,因此实际执行的顺序有可能根据实际情况改变。
图1为背景技术中的现有真空光镊系统。
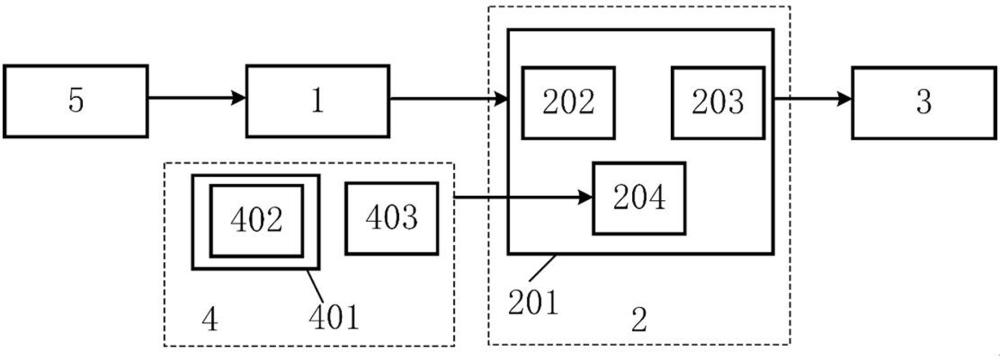
图2为本发明的真空光镊系统的其中一个示意图。
图3为本发明的真空光镊系统的另一个示意图。
图4为本发明其中一个实施例的真空光镊系统的示意图。
图5为本发明中实施例中微粒起支模块的示意图。
图中,真空光阱生成模块1、真空腔模块2、信号收集模块3、起支模块4、光源模块5、真空规6、带有阀门的真空泵组7、显微物镜101、校正环102、真空腔体201、前腔镜202、后腔镜203、放气阀204、收集透镜301、聚束透镜302、四象限探测器303、起支容器401、雾化器402、连接管道403、激光器501、第一平凸透镜502、第二平凸透镜503、第一反射镜504、第二反射镜505。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本申请相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本申请的一些方面相一致的装置和方法的例子。
在本申请使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本申请。在本申请和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
应当理解,尽管在本申请可能采用术语第一、第二、第三等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本申请范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。取决于语境,如在此所使用的词语“如果”可以被解释成为“在……时”或“当……时”或“响应于确定”。
还需要说明的是:在本申请中提及的“多个”是指两个或者两个以上。“和/或”描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B可以表示:单独存在A,同时存在A和B,单独存在B这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。
本发明的用于悬浮纳米微粒的真空光镊系统,通过将原有真空光镊系统中的真空光阱生成模块和信号收集模块移至真空腔外,设计可承受极高真空的小型真空腔,减小腔内放气源和腔体本身的放气量,来提高真空光镊系统的真空度。并调节真空光阱生成模块的部分镜组,从而调整聚焦光束形成焦点的焦距,以此以此来校正厚腔镜引入的像差,在腔体内部形成可用于稳定捕获纳米微球的光阱。
如图2所示,本发明的用于悬浮纳米微粒的真空光镊系统包括真空光阱生成模块1、真空腔模块2、信号收集模块3、起支模块4,与图1所示的现有真空光镊系统相比,本发明中的真空光阱生成模块1和信号收集模块3均位于真空腔模块2的外部,且分别位于真空腔模块2的两侧;真空光阱生成模块1由多个透镜组合而成,其焦距可调节,用于补偿腔镜引入的像差,保证准直光束在真空腔内发生紧聚焦,且焦点无像差。如图3所示,真空腔模块2包括真空腔体201,和设置在真空腔体201内部两侧的前腔镜202和后腔镜203,以及安装在真空腔体201上的放气阀204,用于破空和微粒起支;本发明中起支模块4在起支过程中与真空腔体201通过放气阀204相连,利用压差将雾化颗粒压入真空腔模块2中,微粒捕获成功后,可关闭放气阀,移走起支模块4。
真空光阱生成模块1、真空腔模块2、信号收集模块3满足如下条件:
(1)真空光阱生成模块1的工作距离>前腔镜202的光学厚度,从而保证安装在真空腔模块2外的真空光阱生成模块1的紧聚焦焦点处于真空腔体201内部。
(2)前腔镜202的光学厚度、后腔镜203的光学厚度,加上前腔镜202、后腔镜203之间的间距,三者之和小于真空光阱生成模块1的工作距离与信号收集模块3的工作距离之和。
另外,作为优选,前腔镜202和后腔镜203尽量选择透过率高的镜片,如透过率均大于99.9%,且镜片大小与入射和出射的散射光大小匹配。另外,前腔镜202和后腔镜203采用耐高压的真空材料,使其可承受超高真空,例如微晶玻璃、高硼硅,石英的JGS1,石英的K9。腔镜材料可在保证极高真空的环境下尽可能的薄,以满足超高真空和显微物镜工作距离的要求。
如图4所示,真空腔体201上还设置有真空规接口和真空泵组接口。真空规接口连接真空规,实时监测腔内真空度。真空泵组接口通过真空阀与真空泵组相连,用于为真空腔体201抽真空。
由于真空腔体体积大幅度减小,没有直接向腔体内喷射雾化颗粒的窗口,此外直接向腔体喷射雾化颗粒容易导致雾化气体在小腔体表面凝结,污染腔内环境,起支变得困难,所以设计了如图5所示的专门用于本发明中真空光镊系统的起支模块4,其包括起支容器401、雾化器402,连接管道403,起支过程中,利用连接管道403连接起支容器401和真空腔模块2的放气阀204,将真空腔模块2的真空抽至低真空环境,打开雾化器402使雾化粒子充满起支容器401,之后关闭雾化器402,缓慢打开放气阀204,通过内外压差将雾化颗粒压入真空腔体201中完成起支。捕获成功后,关闭放气阀204,移开起支模块4。连接管道403内径为6mm,采用透明树脂材料,应避免使用金属材料,因为金属材料表面温度更低,会使雾化颗粒在管道处凝结,除此之外连接管道和放气阀连接处采用o圈密封方式,方便连接和拆卸。
下面给出本发明的一个具体应用实例,如图4和图5所示,该实施例的用于悬浮纳米微粒的真空光镊系统包括由激光器501、第一平凸透镜502、第二平凸透镜503、第一反射镜504、第二反射镜505组成的光源模块5,真空光阱生成模块1、真空腔模块2,由收集透镜301、聚束透镜302、四象限探测器303组成的信号收集模块3,以及由起支容器401、雾化器402、连接管道403组成的起支模块4。
其中,激光器501是捕获光路的核心器件,能够产生波长为1064nm的低噪声高功率高稳定性的激光,出射激光通过第一平凸透镜502和第二平凸透镜503组成的扩束系统扩束,之后利用第一反射镜504和第二反射镜505调节光束方向射入后方的真空光阱生成模块1。该实施例中的真空光阱生成模块1为带有校正环102的显微物镜101,显微物镜的工作距离为4.5mm,校正环用于校准后方的前腔镜202导致的像差。真空腔体201紧贴显微物镜放置,其前腔镜202和后腔镜203采用微晶玻璃材质,厚度为2mm,可承受1e-10mbar高真空,且镀有1064nm的增透膜,使得1064nm激光的透过率大于99.9%。
真空腔体201通过真空泵组接口连接带有阀门的真空泵组7,用于抽真空;真空腔体201连有放气阀204,用于真空腔破空和微粒起支。真空规6与真空腔体201相连,用于测量腔内真空度。微粒的散射光经过收集透镜301收集后经由聚束透镜302聚束,照射在四象限探测器303上,完成微球运动信号的探测与采集。
起支模块4如图5所示。
综上所述,基于本发明提出的一种用于悬浮纳米微粒的真空光镊系统,真空光镊系统中真空腔体的极限真空度相比传统方案可大幅度提升,有助于提升基于真空光镊的极弱力测量和加速度传感系统的灵敏度和测量精度等各项指标,同时真空度提升后可以减小背景气体对纳米微粒的加热效应,使得纳米微粒的量子基态冷却更易实现。另外腔体尺寸可以做到很小,有助于系统小型化发展应用。
本发明的一种用于悬浮纳米微粒的真空光镊系统的光源模块5中激光器501用于产生捕获微粒的激光,除了应用实施例1中提到的低噪声高功率高稳定性的1064nm激光器外,也可采用低噪声高功率高稳定性的1550nm激光器,之后光路中相关器件均需改为1550nm镀膜。
本发明的一种用于悬浮纳米微粒的真空光镊系统的光源模块5中由第一平凸透镜502和第二平凸透镜503组成的激光扩束系统,还可以通过其它方式实现,例如平凹透镜和平凸透镜组合、其它面型透镜的组合,以及耦合进光纤后从合适的光纤准直器射出完成扩束。
本发明的一种用于悬浮纳米微粒的真空光镊系统的真空光阱生成模块1除了采用应用实施例中的带有校正环的显微物镜外,还可以通过其它的透镜组合实现,只需满足该透镜组中的某些镜组可移动,用于校正后面前腔镜202产生的像差即可。
本发明的一种用于悬浮纳米微粒的真空光镊系统的真空腔模块2中的前腔镜202和后腔镜203除了采用微晶玻璃材质外,也可采用其它耐高压的真空材料,使其可承受超高真空,例如高硼硅,石英的JGS1,石英的K9等。腔镜材料可在保证极高真空的环境下尽可能的薄,以满足超高真空和显微物镜工作距离的要求。
本发明的一种用于悬浮纳米微粒的真空光镊系统的信号收集模块3中的收集透镜可以用高数值孔径的显微物镜代替来收集微粒的前向散射光,只需满足前腔镜202的光学厚度、后腔镜203的光学厚度,加上前腔镜202、后腔镜203之间的间距,三者之和小于真空光阱生成模块1的工作距离与信号收集模块3的工作距离之和。
本发明的一种用于悬浮纳米微粒的真空光镊系统的信号收集模块3中的四象限探测器303可由两组D型镜和平衡探测器的组合代替,测量被光镊系统捕获的微粒的运动信号。
本发明的一种用于悬浮纳米微粒的真空光镊系统的起支模块4用于纳米级粒子的雾化起支。连接管道403的内径不应过粗,应该与放气阀204内径相当,也不宜过细,否则雾化颗粒容易在管壁上沉积,其材料也可选用PVC等其它材料,但应避免使用金属材质,因为金属表面温度更低,雾化颗粒容易在管壁上凝结,从而降低起支的成功率。
本发明的一种用于悬浮纳米微粒的真空光镊系统的起支模块4在起支时与真空腔模块2的放气阀204通过连接管道403相连,连接方式除了采用O圈密封方式外,还可采用其它的可快速拆卸安装的密封方式,如通过卡扣式密封件(专利号:CN213145326U)连接密封。微粒捕获成功后,可快速断开连接管道403和放气阀204的连接,移走起支模块4。
本发明的一种用于悬浮纳米微粒的真空光镊系统的起支模块4需要将雾化后的粒子先存储在一个预先的容器,即起支容器401内,然后利用内外压差使粒子进入真空腔,但是使雾化粒子充满起支容器401的方法可以是多种多样的,除了图5所示起支模块4中将雾化器放置在起支容器401内部的方案外,还可以将雾化器402放置在起支容器401外部,通过其它接口使雾化后的粒子充满起支容器401,然后移走雾化器402,之后开启放气阀204,利用内外压差,将起支容器内的雾化粒子压入真空腔内,完成起支,最后移走起支模块4。
本发明适用于基于真空光镊系统的极弱力传感和电场传感系统,由于将真空腔内的所有光学元件均移动至真空腔外,所以可以大幅度提升真空光镊系统的真空度,又由于装置的真空度越高,极弱力探测和电场传感的灵敏度就越高,所以本发明的一种用于悬浮纳米微粒的真空光镊系统将大幅度提升基于真空光镊系统的传感装置的灵敏度性能指标。
本发明的真空腔的体积不再受限于腔内光路器件,可以做到很小,具有小型化和集成化的优势。
本领域技术人员在考虑说明书及实践这里公开的内容后,将容易想到本申请的其它实施方案。本申请旨在涵盖本申请的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本申请的一般性原理并包括本申请未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本申请的真正范围和精神由权利要求指出。
应当理解的是,本申请并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本申请的范围仅由所附的权利要求来限制。