联接器控制系统
文献发布时间:2023-06-19 09:47:53
技术领域
本发明涉及用于控制将附件联接到挖掘机的挖掘机臂上的联接器或从其分离的控制系统。这样的附件之一可以是挖掘机铲斗。
背景技术
本领域中已知用于将附件联接到挖掘机的挖掘机臂的联接器,也称为快速联接器、快速钩或挖掘机联接器。联接器通常包括顶部和底部,顶部可使用两个附接销(通过针对附接销设置的两对孔)联接至挖掘机臂,而底部用于与附件上的另外两个附接销接合。在现代联接器中,下半部通常包括两个卡爪而不是孔。这些卡爪与附件的另外两个附接销中的相应销接合,并且设置用于那些卡爪中的至少一个的闭合机构,该闭合机构通常从挖掘机的驾驶室由诸如螺丝驱动器或液压缸的可远程操作的致动器经由联接器控制系统内驱动,以致动闭合机构在闭合和打开位置之间移动。闭合位置通过锁定到卡爪中的销固定附件至联接器。
许多这种联接器的常见特征在于所述两个卡爪之一通常被称为前卡爪。它的开口(用于容纳附件的两个联接销中的第一个或前一个)通常从联接器的第一端引出。该第一端通常被称为前端,因为它是首先被引导到附件销上的端部。开口面向的方向(向前方向)通常平行于连接联接器顶部的两对孔的假想线,该顶部用于将联接器附接到挖掘机臂的末端,即相对于其处于零度角。有时,开口面向的方向相对于该线稍微向上倾斜,可能与平行线成高达15°的角度,从而倾斜底壁趋于将第一销保持在其中,但通常直接平行于该线。
第二卡爪通常被称为后卡爪,因为它位于联接器的相对的(后或前)端部附近,尽管其位于联接器的底壁中。它通常向下开口,即沿大体垂直于前卡爪的方向开口的线,或沿在联接器上半部的两对孔之间的假想线开口。如前卡爪,后卡爪也可能偏离垂直方向,可能会偏离15°。
从联接器侧面看卡爪显示为单个,但通常卡爪是分叉的,尤其是后卡爪,因为联接器内部有工作机构,因此经常需要维修,由此两个部件允许它们之间的间隙用以触达可维修部件。
通常所述卡爪与联接器的主体一体形成,此外,它们可以由比联接器主体更硬的钢制成,并且在制造联接器期间将它们联接至联接器的主体。
为了本申请目的,我们在后文将所述卡爪称之为后卡爪和前卡爪,即使每个卡爪可能具有多个元件。
后卡爪通常具有闭合机构,该闭合机构包括闩锁构件和致动器。对于大多数联接器,闩锁构件被描述为钩或闭合板。闩锁构件可以通过使用致动器在闩锁位置和解锁位置之间滑动或枢转。在闩锁位置中,后卡爪的开口至少部分地被闩锁构件闭合。在解锁位置中,闩锁构件从闩锁位置缩回,以便根据需要使卡爪的开口保持打开状态,以允许将附件的第二附接销放置在其中。这可能是完全缩回以完全遮蔽后卡爪的开口,或者是不完全缩回,其中卡爪的开口仅部分被遮盖,比闩锁给定附件的第二销所需的程度遮挡更少(不同的附件可能具有不同的销间距,因此在使用联接器时,闩锁位置经常会有一定程度的变化)。
解锁位置既允许第二附接销向上插入后卡爪,也允许先前卡住的第二附接销从后卡爪向下移除。
第二附接销相对于后卡爪的插入(或移除)通常是在前卡爪中捕获第一附接销之后(之前),并且通过旋转联接器以相对于前卡爪下降(提升)后卡爪来实现。在附件的附接或分离过程中,最好是附件在地面或固体表面上,这样它不太可能相对于联接器意外移动。然而,许多闩锁机构需要一定程度的联接器反转来释放联接器内的阻挡构件,这种反转状态通常是“收起(crowd)”位置——该术语在本领域中指臂和联接器在驾驶室下方并朝向驾驶室卷曲以将附件的第一附接销定位在第二附接销上方的位置,即前卡爪通常指向上方。参见例如GB2330570、GB2441332和WO2008/029112。然而,这种操作的困难包括需要训练操作者,通常需要将附件放置在地面上,并且通常需要将吊臂指向空中相当高的位置,以允许附件在挖掘机臂下旋转,因此在低高度隧道中很难实现。
因此,希望提供一种用于在联接或分离过程中操作联接器的系统,以及一种用于该过程的联接器,其中附接和/或分离的方法更加简单,但是保持了防止不正确的附接和分离。
发明内容
根据本发明,提供了一种用于挖掘机的挖掘机臂上联接器的联接器控制系统,该联接器包括液压致动器,挖掘机包括用于控制联接器的液压致动器的操作的电磁阀,以及挖掘机臂至少包括由第一液压挖掘机致动器操作的吊臂,联接器控制系统包括控制系统,状态指示器和位于挖掘机驾驶室中的联接器控制开关,控制系统通常包括控制器或控制箱,用于直接地或经由电缆或以无线方式附接至挖掘机的电磁阀,其中联接器控制开关和状态指示器连接至控制器,其特征在于,联接器控制系统包括:压力传感器,用于连接至吊臂液压致动器的液压系统,该压力传感器布置为在吊臂液压致动器的液压流体压力低于50barg时进行感测,控制器连接到压力传感器以检测所感测的状态,并且作为对其的响应被布置成通过状态指示器向操作员提供指示。
控制器可以是单个控制器的形式。它可以直接连接到联接器致动器的电磁阀上,或者可以通过无线方式连接。
压力传感器不是查看吊臂液压流体的压力,而是查看斗杆的液压致动器的液压流体压力,或铲斗致动器的液压流体压力(用于使附件相对于斗杆旋转)。如果其中任何一个在0到60barg之间,这再次表示挖掘机臂在臂的端部处没有装载重物,表示附件落地。这个动作可以称为触碰地面。
在优选配置中,挖掘机臂包括所有三个致动器——用于吊臂、斗杆和铲斗致动器,以及每个致动器的电磁阀的歧管。歧管还可以具有用于联接器的致动器的电磁阀。所观察的压力是驱动相关致动器的主压力,最好是吊臂、斗杆致动器或铲斗致动器。
通常,压力传感器安装在致动器上或通过电磁阀安装。它可能是在一馈送线上。
代替被监控的压力低于50barg,用于任何特定挖掘机致动器的被监控压力可能低于任何预定压力,替代预定压力可能是吊臂缸提升挖掘机臂自由端离开地面所需的吊臂缸液压系统中的最小压力,无论是否带有连接器和附件。最小压力将随挖掘机臂的尺寸或斗杆的位置而变化,并且可以为任何给定的挖掘机臂/联接器/附件配置进行自定义设置——例如,较小的挖掘机臂可能需要较小的预定压力作为触发器。然而,一个远低于这个最小值的数字是有用的,因为它将直接用于操作范围更广的挖掘机臂。最好是50barg,或10barg和60barg之间的预定压力。
优选地,状态指示器是视觉指示器。它可以是音频指示器,也可以是音频和视觉指示器二者。
优选地,压力传感器通过有线连接而连接到控制器。或者,也可以是无线连接。开关和传感器同样可以无线或有线连接到控制系统。
在优选系统中,传感器、开关、状态指示器和控制器都是无线连接在一起的离散单元。
优选地,挖掘机的电磁阀是电磁阀歧管,其还包括用于吊臂致动器的电磁阀。因此,压力传感器可以是控制器的一部分。或者,压力传感器可以与之分离,例如附接到吊臂致动器的电磁阀上,例如在吊臂的基部。
优选地,控制器具有一插头插座,以安装在电磁阀或歧管上的控制插座中,控制器还具有第二控制插座,以接收连接到驾驶室控制电缆的OEM插头插座,这样控制器就可以在OEM插头插座和电磁阀或歧管之间连接到挖掘机上。
在一个实施例中,状态指示器设置在挖掘机臂上,并且在操作员对挖掘机臂的视线范围内具有视觉指示器。
或者,状态指示器可以位于挖掘机驾驶室中,例如,挖掘机遮阳板中或遮阳板上的视觉指示器,或挖掘机的屏幕柱中或屏幕柱上的视觉指示器。或者,视觉指示器可并入联接器控制开关或挖掘机仪表板中或其上,或在操作员使用挖掘机期间可见的其他位置。
甚至可以为状态指示器提供触觉反馈。
优选地,状态指示器包括LED阵列。
优选地,状态指示器是视觉指示器,其可以显示多种颜色,第一种颜色表示检测到吊臂缸液压系统低于50barg的状态。
优选地,指示为琥珀色。
优选地,第二种颜色表示联接器控制开关对联接器致动器的操作。优选地是红色指示器。
优选地,联接器控制系统还包括计数器,优选地作为控制器的一部分。使用计数器,联接器控制系统可以计数并指示在预定时间段内检测到低于50barg的压力。优选地,联接器控制系统禁用联接器控制开关的操作,直到该预定时间段已经过去。
优选地,预定时间段是至少2秒、更优选3秒、4秒或5秒的周期。然而,它可以是任何预定的时间段,尽管优选为非零。它可以是操作员设置的时间段。毕竟,操作员可能更喜欢更长的时间段,尤其是在他操作挖掘机的经验不足的情况下。
优选地,存在至少两秒的最短时间段。
本发明的联接器控制系统可在挖掘机生产期间被提供给挖掘机,以便将其部件合并到挖掘机的制造中。或者,它们也可以作为改装套件提供。
优选地,视觉指示器具有一个背胶,用于在挖掘机操作员的视线内附接到挖掘机上。优选地,视觉指示器附接在挖掘机臂朝向驾驶室的一侧。
优选地,控制器包括插头插座,其适于匹配电磁阀或电磁阀歧管中设置的控制插座。
优选地,由联接器控制系统控制的联接器包括用于接收附件的第一附接销的前卡爪、用于接收附件的第二销的后卡爪、与后卡爪相关联的闩锁和与闩锁相关联的液压油缸。优选地,闩锁是一闩锁钩。闩锁可相对于联接器壳体枢转。液压油缸将经由电磁阀连接到控制器。
优选地,在联接器中没有阻挡机构,其用于选择性地卡住闩锁以防止在操作液压油缸时从闭锁状态缩回。因此,在没有联接器控制系统的情况下,联接器将执行分离过程,而不管其取向如何。因此,联接器控制系统通过停用联接器的控制开关来提供阻挡功能。
联接器也可包括用于前卡爪的闩锁构件。优选地,也可以通过直接地或经由释放机构来操作液压油缸,从而操作用于前卡爪的闩锁。优选地,用于前卡爪的闩锁构件也响应于液压油缸而操作,而不管联接器的取向如何。
用于前卡爪的联接构件可以具有伸展状态,在该状态下,它与开口机构分离。
本发明还提供了一种将附件从挖掘机的挖掘机臂上的联接器上分离的方法,该方法包括提供如上所述的联接器控制系统,其中,如果挖掘机臂、联接器和附件保持不与地面接触,则无法开始分离程序,因为联接器控制开关被停用,而在与地面接触至少两秒的预定时间段后,联接器控制系统检测到在该预定时间段吊臂缸的液压系统中的压力小于50barg,然后,视觉指示器提供分离准备就绪的指示,在重新激活联接器控制开关后,允许在操作员将联接器控制开关从第一状态切换到不同的附件分离状态时发生分离过程。
同样,代替被监控的压力低于50barg,被监控的压力可以低于任何预定压力,因为替代预定压力可能是吊臂缸的液压系统中用于吊臂缸提升挖掘机臂自由端离开地面所需的最小压力,无论是否有联接器和附件。最小压力将随挖掘机臂的尺寸或斗杆的位置而变化,并且可以为任何给定的挖掘机臂/联接器/附件配置进行自定义设置,例如,较小的挖掘机臂可能需要较小的预定压力作为触发器。然而,一个远低于这个最小值的数字是有用的,因为它将直接操作范围更广的挖掘机臂。最好是50barg,或10barg和60barg之间的预定压力。
优选地,当所述联接器控制开关从第一状态切换到不同的附件分离状态时,通过以某种方式向联接器致动器供电的系统自动地执行分离程序,以撤回联接器的闩锁机构。
优选地,联接器控制系统额外控制挖掘机臂,以便在完成分离程序后提升联接器离开附件。
优选地,挖掘机臂的提升另外包括联接器的旋转,以使前卡爪脱离附件。
优选地,如果在对预定时间段进行计数时,联接器控制开关处于不同的附件分离状态,则状态指示器在预定时间段之后保持关闭。
优选地,如果在对预定时间段进行计数时,联接器控制开关处于不同的附件分离状态,则在预定时间段之后维持联接器控制开关的停用。
优选地,如果在对预定时间段进行计数时或之后压力超过50barg,则状态指示器在预定时间段后保持关闭。在联接器控制开关切换到不同的附件分离状态后,这可能会超时。
优选地,如果在对预定时间段进行计数时或之后压力超过50barg,则维持联接器控制开关的停用。在联接器控制开关切换到不同的附件分离状态后,这可能会超时。
本发明还提供了一种将本发明的联接器控制系统安装到挖掘机上的方法,该方法包括取下控制器,从挖掘机的电磁阀上拔下挖掘机控制电缆使其端口空置,将控制器插入到现在空置的端口,将联接器控制电缆插入控制器上的端口中,将视觉指示器附接到挖掘机上使其位于挖掘机操作员在其驾驶室内时的视线范围内,以及将联接器控制开关定位在挖掘机驾驶室内供操作员使用。
在一个实施例中,该方法还包括将压力传感器附接到吊臂致动器的电磁阀。但是,通常情况下,吊臂的液压系统的电磁阀合并在电磁阀歧管中,其端口接入挖掘机臂和联接器的所有致动器的控制电缆。
附图说明
现在将参照附图仅举例更详细地描述本发明的这些特征和其他特征,其中:
图1示意性地示出了装有本发明的联接器控制系统的挖掘机;
图2示意性地示出本发明的联接器的示例;
图3示意性地示出了附接在电磁阀上的本发明的示例;
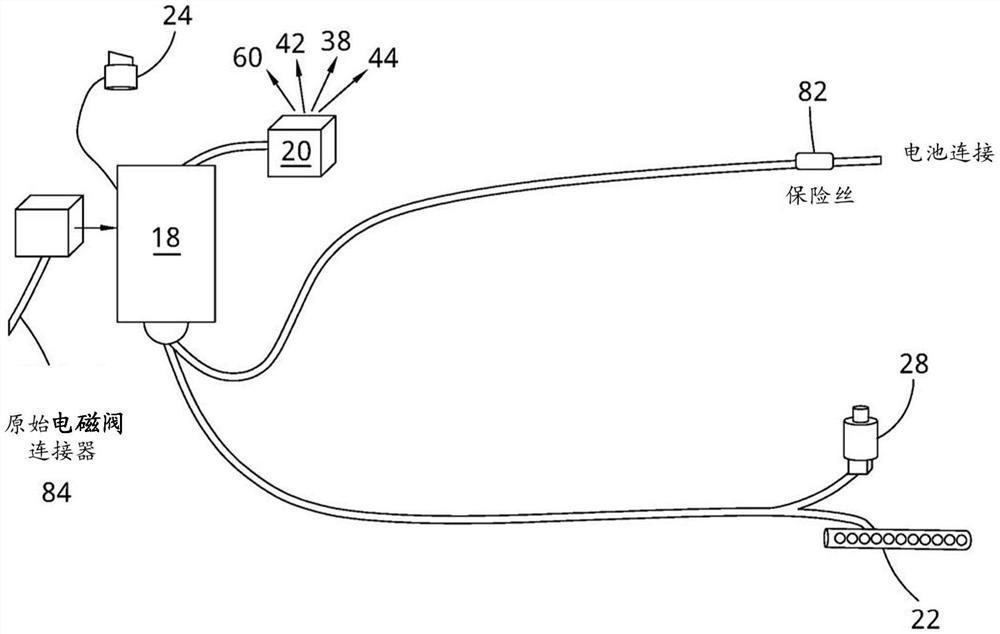
图4示意性地示出了本发明的另一布置,用于在没有主电磁阀歧管的挖掘机上进行改装;
图5至图8示意性地显示了在正常使用中结合本发明的挖掘机的操作,其中由于联接器控制系统的功能,联接器控制开关不可操作;
图9和图10示意性地显示了挖掘机在地面上短暂接触的使用情况,即挖掘机在没有足够长的时间放置在地面上以允许使用分离程序的情况下工作;
图11至图13示意性地显示了一实施例,在该实施例中,联接器控制开关的启用的开始是通过将联接器放置在地面上超过3秒来实现的,但随后通过提升挖掘机臂而终止;
图14至图16示意性地显示了挖掘机的操作方式,以允许执行附件分离;以及
图17显示了优选配置中本发明的联接器控制系统的流程图。
具体实施方式
首先参考图1,图中所示为挖掘机12,其挖掘机臂14在其自由端具有铲斗形式的附件34。挖掘机臂14包括吊臂36,吊臂36的第一侧具有吊臂致动器或缸38。吊臂的另一侧还设有相应的吊臂致动器或缸。挖掘机臂14还包括枢转连接至吊臂36的斗杆40,以便在臂缸42的控制下枢转。臂缸42的收缩使斗杆相对于吊臂伸直。臂缸42的伸展部分反而将斗杆40折叠到吊臂36下方。替代地,吊臂缸38升起或降下吊臂36。
附件34以枢转连接到斗杆40的端部,该连接通过联接器实现,该联接器具有用于控制附件从挖掘机臂释放的致动器。更优选的联接器是如图2的联接器。无论哪种方式,附件34都可以通过铲斗缸44的操作相对于斗杆40旋转,该缸44伸展以将附件34卷曲到收起位置,该铲斗缸44收缩以打开铲斗面46或从中倾出内容物。替代地,附件34可以反向安装到挖掘机臂14上,从而使控制动作反向。然而,用于控制附件释放的致动器仍然通过打开联接器的一个或两个卡爪而以相同的方式工作,附件的附接销可以附接到所述卡爪中或释放,如本领域所知。
挖掘机12包括后端,发动机位于该后端。发动机用于驱动挖掘机的履带,也用于驱动挖掘机臂和联接器的液压系统,以操作各种致动器或缸。发动机还为挖掘机的蓄电池提供维持电量的功率。
挖掘机12还有驾驶室50,操作员坐在其中。
在该驾驶室中,提供了联接器控制开关24。联接器控制开关24用于选择性操作致动器,该致动器控制附件34与挖掘机臂14末端的联接或分离。
最后,挖掘机包括视觉指示器22,操作员可从驾驶室50的座位上看到该视觉指示器,在本实施例中,该指示器位于挖掘机臂的面向操作员的一侧。
在大多数挖掘机中,在联接器的侧面或后部,都设置有朝向挖掘机背部的出入口(access hatch),用于介入挖掘机的电磁阀或电磁阀歧管,该电磁阀或其歧管至少用于控制联接器致动器,该致动器控制附件34与挖掘机臂14的末端的联接或分离。其优选是电磁阀的歧管,以便它也控制吊臂缸、铲斗缸和臂缸。
根据本发明,控制器18连接到用于本发明操作的电磁阀。如果电磁阀位于其他位置,控制器最好也位于其他位置,以便仍然位于电磁阀或电磁阀歧管上,因为这维持了本发明电线束的简单性。
如图2所示,示出了适合与本发明一起使用的联接器的示例。
尽管可将多种形式的联接器用于本发明一起,无论是现有的还是新的,理想情况下,联接器应能够操作致动器,该致动器控制附件34与挖掘机臂14的末端联接或分离,而无需将联接器操纵到不同的取向,以便允许释放联接器中的阻挡构件。因此,与本发明一起使用的优选联接器没有用于阻碍后卡爪的闩锁构件的运动的阻挡装置。在后卡爪中的第二附接销错误释放的情况下,阻止联接器前卡爪的闩锁打开的能力(因此即使后卡爪被释放,也可以确保将附件的第一附接销固定在前卡爪中)仍可以是优选的,以允许保持附件。
可以看出,在图2中,联接器16的顶部部分具有两个孔52,通过孔52,挖掘机臂的斗杆40中的销可以附接到联接器16上。然后,在联接器的底部部分中有前卡爪54和后卡爪56。
后卡爪具有枢转闩锁钩58,但也可以替代地提供滑动闩锁。
还提供了用于控制附件34与挖掘机臂14的端部的联接或分离的致动器60,致动器包括缸,用于驱动活塞62从其进出,从而向前或向后移动该枢转闩锁钩58。
由于闩锁钩通过从前卡爪向后移动闩锁钩来固定后销,并且由于第一销68和第二销66因它们安装在附件34的结构内而相对于彼此固定,所以闩锁钩58可以在其拉紧后卡爪56中的第二销66时将第一销固定在前卡爪中。
还提供前闩锁构件70,以例如在因枢转闩锁钩58的摆动而错过第二附接销66的情况下,即在联接器16被不当使用的情况下,抓住第一连接销68。如图2所示,因为致动器60上的后指状物72能够与安装在活塞62枢轴销上的释放臂74的第一侧接合,所以可将前闩锁构件70从其默认闩锁状态提升至打开位置。然后,该释放臂74的另一侧可以抵靠凸缘76的表面接合,以将前闩锁构件70旋转到打开结构,从而将前销68从前卡爪54中释放。在将附件34附接到联接器16的过程中,在前闩锁构件70被罗斯塔弹簧(Roster spring)78或其他形式的偏压装置弹起到如图2所示的闭合状态时,首先第一销68卡入前卡爪54,然后后卡爪56降到第二附接销66上,此前使活塞62从致动器60中断电,以将枢转闩锁钩58拉紧并紧靠第二销66。
参照图3,提供了示出本发明的联接器控制系统的简化布置的示意图。可以看出,连接器80设置用于将联接器控制系统连接到电磁阀20上的连接点96。该连接器80是本发明的控制器18的一部分。控制器18作为单个部件与连接器80合并。图4是类似的,但是有额外的部件。
控制器18的动力由挖掘机的电池48提供。该电池还连接到联接器控制开关24,以提供由开关24控制的电流。开关24可以改装到挖掘机的驾驶室中,也可以是挖掘机生产期间驾驶室中提供的OEM开关,其导线已经存在。
在本实施例中,联接器控制开关24是翘板开关,但它可以是拨动开关或按钮开关或制造商可能希望的任何其他类型的开关。开关24与控制器18连接,以允许控制器控制开关是被停用还是可用于控制联接器内的致动器。
当连接器80连接到挖掘机的电磁阀20时,它将开关24连接到用于联接器内的致动器的电磁阀。
在挖掘机中,电磁阀是组件或歧管的一部分,该组件或歧管包括传感器,其用于确定挖掘机臂14和联接器16的各种致动器60、42、38、44的控制线路中的液压压力,控制器18通过连接器80可以直接从与其连接的电磁阀组件或歧管20读取吊臂缸38的压力。
然后,在翘板开关中提供视觉指示器22,其控制线路遵循开关24和控制器18之间的连接线。或者,可以从控制器连接单独的状态指示器,例如如图1所示。
参考图4,显示了电磁阀20没有用于吊臂缸压力线路的压力传感器28的替代布置。该布置也适合于改装布置。
在本实施例中,电池48和控制器18之间再次提供电池连接,尽管是通过保险丝(可能为任一实施例提供)。该配置还具有联接器控制开关,其可能是新的或预先存在的,如图所示,它是预先存在的,因此连接到原始电磁阀连接器84,尽管只有一条电缆与之连接,电缆有两条导线,以允许从原始电磁阀连接器供电,开关回路(switched return)同样源自该处。
压力开关28也连接到控制器18上,该压力开关28连接到位于挖掘机上其他地方的吊臂缸液压回路,例如在吊臂36的基部或吊臂缸38的基部处,可以为其提供单独的电磁阀。
此外,提供了视觉指示器22,例如,其可以在挖掘机臂上,如图1所示。如图所示,视觉指示器是LED阵列,但是也可以(或另外)提供其他状态指示器。
在这两种布置的情况下,控制器18通过压力开关28可以确定吊臂缸38的压力是否低于50(五十)barg,这表示附件34置于如地面98这样的表面上,此时计数器94可以确定该压力是否仍然存在(或该压力基本恒定)预定时间段(优选至少2秒,更可能至少3秒)。控制器随后将点亮状态指示器22,并启用开关24。然后,激活开关可以控制联接器内的致动器。
现在将参考图5至图17描述联接器控制系统的进一步优选操作,图5至图16显示挖掘机的操作模式以及联接器控制系统对其的响应,而图17显示了优选操作控制的流程图。
首先参考图5至图8,图中所示为挖掘机12,其包含上述任一联接器控制系统。在图5中,挖掘机臂降到接近(但不是完全)地面接触状态,联接器控制开关24位于“请勿操作油缸”的位置。视觉指示器22不发光,表示联接器控制系统10的开关24处于非工作状态。在这种情况下,由于吊臂36承载自身和斗杆、联接器和附件的重量,吊臂缸38中的压力将高于预定的安全压力,例如上述50barg。
图6显示了吊臂缸30的启动,以提升(向上旋转)吊臂36,而联接器控制开关24保持不变。视觉指示器22仍然没有显示任何光,因此它仍然指示联接器控制系统的开关24处于停用或休眠状态。
图7现在显示挖掘机臂14仍处于提升位置,但联接器控制开关24现在已切换到分离激活位置。然而,联接器控制系统尚未识别压力开关/传感器28的低压状态,因此开关24仍保持在其停用/休眠状态,通过视觉指示器22仍不亮来指示。
然后,图8显示了降下吊臂36以使联接器16与地面92接合,但视觉指示器22仍然没有显示任何光,这表示联接器控制系统的开关24保持停用或休眠。这是本发明的优选特征,因为在该优选布置中,当联接器控制开关切换到分离程序激活状态时,如果联接器16被置于地面上,则联接器控制系统的开关保持停用或休眠。这是有益的,因为它在使用挖掘机进行挖掘或运土过程中提供了安全性——只有当开关在非分离位置启动时,它才能进入分离程序。
参考图9和图10,图9显示了位于地板上的联接器16,这样吊臂36处于静止状态,压力传感器28感应到的液压将小于50barg。然而,在将铲斗34放在地面92上后不久,铲斗被再次提起,如图10所示,因此,铲斗在地面上的停留时间小于必要的预定时间段,例如3秒。因此,联接器控制系统10的开关24保持休眠,如视觉指示器22上缺少指示所示。无论联接器控制开关处于分离状态还是保持非分离状态,都是如此。
接下来参考图11,附件34再次被放置在地面92上,但是这一次的计数满足所需的预定时间段,例如至少3秒94。由于开关处于第一(非分离)状态,这表示不希望开始分离程序,联接器控制系统允许视觉指示器和控制器/开关进入分离准备状态,如视觉指示器22上的照明所示。在本实施例中,该指示为琥珀色照明,因为该颜色被广泛认为是一种危险情形(此时可以开始分离程序,这清楚地允许联接器释放附件)。但是,由于附件在地面上,这实际上是将附件从联接器上释放的安全条件。
在优选实施例中,照明是一个以上的灯。优选地,它是单独的照明,提供了更大的机会被操作员看到。
优选地,照明包括一个或多个LED,在这种情况下为沿着照明barg分开的两组LED。如图所示,在每个组中可以有三个LED,但也可以有其他布置,包括可读警告的照明。
但是,如图12所示,操作员对吊臂缸38重新加压,以提升吊臂36,从而将附件34从地面92上提起。这将立即停用开关24,联接器控制系统10关闭视觉指示器22。因此,联接器不能再操作以释放附件,从而保持附件的安全,尽管之前可能会释放它。
在这种情况下,即使如图13所示,随后将开关24切换到其分离激活位置,联接器控制系统24仍保持在其预防分离状态——由于联接器控制系统10已停用开关24,因此不会发生分离过程。
参考图14至16的顺序,图14显示附件34在两秒前被放置在地面92上,因此经过了2秒的计数,如图所示。
此外,联接器控制开关24处于其第一状态,其表示不期望分离,从而允许朝向预定周期计数。
由于预定时间段尚未过去,视觉指示器22保持关闭。
计数过程也可以通过视觉指示器或另一视觉指示器指示给操作员,但是在所示实施例中没有示出,也没有向操作员显示。
图15显示了经过3秒94和琥珀色灯返回后的视觉指示器22。如图所示,附件34仍在地面92上。联接器控制开关24尚未打开以启动分离程序。
参考图16,当琥珀色灯亮起,且附件仍在地面上时,联接器控制开关24现在切换到激活状态,该状态将视觉指示器22切换到其动作警告状态,在这种情况下,视觉指示器是一完整的条带照明,优选是红色,以表示分离正在发生。这可以是闪烁警告或持续警告。还可能提供音频警告。
因此,作为对该激活的响应,警告灯将改变,并开始执行分离程序。
优选地,联接器控制系统自动执行与联接器的分离程序。在优选联接器的情况下,这仅仅是联接器内致动器的启动,以打开联接器的两个卡爪。
当控制器18操作联接器16中的致动器60时,优选也冻结吊臂缸、臂缸和铲斗缸的操作。这样可防止附件34在分离程序中移动。但是,某些分离程序可能需要旋转联接器以释放阻挡杆。如果控制器连接到电磁阀歧管,并因此连接到挖掘机臂致动器的控制电磁阀,则控制器还可以通过控制铲斗缸44,或通过操作铲斗缸和臂缸42和/或吊臂缸38来操作联接器的附加旋转步骤。
当联接器致动器60完成其移动,从而释放附件的两个附接销时,控制器18还可以随后启动铲斗缸,促使联接器的后卡爪旋转离开附件的第二附接销,然后促使臂缸42移动斗杆40并因此移动前卡爪,从而从附件上移除联接器。
但是,挖掘机臂的这些后期移动可能由操作员执行。
冻结臂铲斗和吊臂缸的功能是可选的。让操作员操作它们可能有好处,这样操作员就可以抵抗附件的任何移动。或者,对于某些联接器,他可能需要实现用于联接器最终致动的收起位置。
因此,本发明的联接器控制系统仅允许:在通过在吊臂缸38处或在其电磁阀处检测吊臂缸38中低于预定压力而感测到附件的静止、地面状态时,启动分离程序。
此外,优选地,仅当联接器控制开关从不分离位置开始时,才可以发生分离过程。这可以在挖掘过程中如果将附件放在地上且翘板开关(rocker switch)处于错误位置时防止附件意外分离。
最后参考图17,示出了优选联接器控制系统10的流程图。可以看出,定时器或计数器32可以持续地操作,或者可以由控制器选择性地操作。当联接器控制开关24接通时,即在激活(分离)位置,定时器被重置,以便有效地禁用联接控制系统和开关,直到联接器控制开关24被置于不分离(或第一)位置。
假设联接器控制开关24处于不分离(或第一)位置,系统接下来会考虑吊臂缸压力的压力开关或传感器是否打开(即检测到给定挖掘机臂的压力高于预定压力)。此压力开关可以是吊臂36底部的压力传感器28,也可以是控制器18中的压力传感器28,这取决于所使用的挖掘机。在优选实施例中,确定吊臂缸液压系统是否处于超过50barg的压力下(或能表示搁置或落地(grounded)的附件状态的其他预定压力)。
如前所述,不同尺寸的挖掘机可能需要不同的预定压力——较小的挖掘机(具有较小的挖掘机臂)可能需要20或30barg的极限,而不是50barg的极限。
其他压力可以是特定挖掘机的预设。
如果压力开关或传感器28指示的压力超过50barg,或设定的预定压力,例如通过关闭或打开,具体取决于其特定布置,则再次重新设置时间,测试恢复到开始,以检查联接器控制开关是否正确设置为不分离状态。但是,如果压力开关或传感器确定的压力低于50barg,计数器将对压力保持不变且至少达到预定时间段(默认为3秒)的时间长度进行计数。在此期间,状态指示器保持熄灭。
如果已经计数了3秒,则状态指示器会相应地进行指示,例如通过打开琥珀色灯来表示准备好进行分离。
然后可提供固定的时间段,用于将联接器控制开关24移动到分离激活状态,这表示操作员选择分离附件。
如果转动开关24以激活分离程序,则用于控制联接器34中致动器60的电磁阀打开,发出分离警告,例如通过视觉指示器变红,琥珀色灯熄灭,然后开始分离程序。
或者,如果联接器控制开关24没有转到分离激活状态,则联接器34的致动器60的电磁阀20保持关闭,最终琥珀色灯将熄灭,返回查看压力开关28,然后压力开关28可能仍在检测低压,在这种情况下,该过程再次循环以使琥珀色灯闪烁,或者由于挖掘机臂再次被使用,压力再次升高,琥珀色灯保持熄灭。
在挖掘机臂再次被使用之前,警告可能一直保持,而不是闪烁警告。
还可提供另一开关或开关的另一位置,以永久分离联接器控制系统,直到其需要启动为止。为此,可能需要一个三位开关。单独的开关可提供此功能。
因此,以上仅通过示例来描述本发明。可以在所附权利要求的范围内对本发明进行详细的修改。
- 用于输送流体的联接器、用于封闭该联接器的流体通道的方法以及该联接器的优选用途
- 用于联接器中的变形管的脱扣监控装置、用于联接器中的变形管和列车联接器