一种智能驾驶线控底盘及其控制方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及汽车技术领域,具体是一种智能驾驶线控底盘及其控制方法。
背景技术
汽车底盘通常由传动系统、行驶系统、转向系统和制动系统及底盘附件等组成。底盘作用是支承、安装汽车发动机及其各部件、总成,形成汽车的整体造型,并接受发动机的动力,使汽车产生运动,保证正常行驶。随着人们生活水平的不断提高,对车辆的舒适性,智能性等要求也越来越高,近几年市场对局部封闭特定场所下提供观光与接驳服务的巴士需求量较大,此类巴士多应用于度假村、旅游景区、工业园区、大学园区等场景。现有线控底盘多集中在乘用车领域,由于技术路线与乘用车有差异,因乘用车总质量比较低,可以不借助液压辅助助力系统即可实现电控转向,或者电机直接控制制动器就可以实现行车制动,商用车转向系统如果采用此方案,会导致转向保险丝乃至电机会出现过载烧坏现象,商用车的制动力也无法保证。并且商用车体量较小,目前商用车领域采用线控底盘的技术较少。针对商用车采用线控系统转向保险丝乃至电机会出现过载烧坏现象,本方案在纯电控转向基础上开发了电液复合线控转向系统,借助液压助力系统以保证电机输出力矩满足载荷的需求,针对制动力不足制动距离过长现象,加装了电机柱塞泵和液压制动组合实现制动力满足载荷大的需求。
发明内容
本发明的目的在于提供一种智能驾驶线控底盘及其控制方法,以解决现有技术中的问题。
为实现上述目的,本发明提供了一种智能驾驶线控底盘,包括底盘本体、电池和整车控制器,还包括线控转向系统、线控制动系统和电子驻车系统,所述线控转向系统包括助力电动机和转向管柱,所述助力电动机与电池和整车控制器电性连接,所述助力电动机固定连接至转向管柱,所述转向管柱下端设置有转向器,所述转向器下端设置有转向横拉杆,所述转向器与转向横拉杆通过齿轮齿条传动连接,所述转向器与底盘本体固定连接,助力电机替代传统商用车的方向盘,在线控电子控制单元和整车控制器VCU的控制下,实现自动驾驶;
所述线控制动系统包括制动压力调节器、柱塞泵和制动器总成,所述制动压力调节器与电池和整车控制器VCU电性连接,所述制动压力调节器与柱塞泵电性连接,所述柱塞泵通过油管连接至制动油罐,所述柱塞泵与制动器总成通过制动液压油管连接;
所述电子驻车系统包括电子驻车执行器,所述电子驻车执行器与底盘本体固定连接,所述电子驻车执行器与整车控制器VCU电性连接,所述电子驻车执行器通过驻车拉丝与制动器总成连接。
进一步的,所述线控转向系统中,还包括转向油罐和转向助力泵,所述转向油罐通过转向低压油管连接至转向助力泵,所述转向助力泵通过转向高压油管连接至转向器,转向助力泵通过高压油管驱动转向器,辅助带动整车转向,避免了转向保险丝或电机过载烧坏。
进一步的,所述线控制动系统中,所述制动液压油管管体上设有压力传感器,所述压力传感器与制动压力调节器电性连接,所述压力传感器与整车控制器VCU电性连接,压力传感器能够实时反馈整车当前的制动压力,制动电子控制单元与整车控制器VCU综合目标制动压力和当前整车制动压力,驱动柱塞泵,对制动器总成进行控制。
进一步的,所述线控转向系统中,所述助力电动机通过蜗轮蜗杆连接至转向器。
进一步的,所述底盘本体还包括车轮,所述车轮内侧设置有节臂,所述转向横拉杆与节臂转动连接。
进一步的,所述线控制动系统中,所述制动器总成包括制动泵和制动盘,所述制动盘与车轮固定连接。
更进一步的,所述电子驻车系统中,所述电子驻车执行器包括驻车电机和拉力传感器,所述电子驻车执行器与驻车电机固定连接,所述拉力传感器通过驻车拉丝与制动器总成连接。
一种智能驾驶线控底盘的控制方法,包括线控转向系统控制方法和线控制动系统控制方法,所述线控转向系统控制方法包括以下步骤:
S1:整车采集当前所需转向角度,并将转角信号传输至转向电子控制单元;
S2:转向电子控制单元接收到转向角度后,通过CAN总线与整车控制器VCU进行数据传输,并调节助力电动机的转速,并输出至转向器;
S3:转向器在接收到助力电动机的转角传递后,通过齿轮齿条驱动转向横拉杆,实现转向;
进一步的,所述线控制动系统控制方法包括以下步骤:
A1:当需要对整车进行制动时,整车控制器VCU通过CAN总线向制动电子控制单元发出制动信号,制动电子控制单元驱动柱塞泵;
A2:柱塞泵运转后,控制调节制动液压油管内的油压,进而驱动制动器总成,对整车进行制动;
A3:当整车制动后,制动液压油管上的压力传感器向制动电子控制单元反馈跟踪制动系统的压力;
进一步的,所述线控制动系统控制方法还包括驻车控制系统控制方法,所述驻车控制系统控制方法包括以下步骤:
B1:整车控制器VCU向驻车电子控制单元发出驻车要求;
B2:电子驻车执行器在接收到驻车要求后,驱动电子驻车执行器内的电机运转,通过驻车拉丝控制制动器总成;
B3:驻车电子控制单元通过电子驻车执行器实时检测拉力传感器数值,拉力达到控制目标要求后,就停止对电机的控制,减速机构自动锁紧。
进一步的,所述步骤S2中,转向电子控制单元接收到转向角度后,通过CAN总线与整车控制器VCU进行数据传输,对转向助力泵内电机转速进行调节,转向助力泵将转向油罐内的液压油通过高压油管输入至转向器。
更进一步的,所述步骤S3中,所述转向横拉杆带动车轮内的节臂,实现转向。
与现有技术相比,本发明的有益效果为:
1、本发明在线控转向系统中,添加助力电动机,替代了传统的整车方向盘,实现了自动驾驶,同时在线控转向系统中添加转向助力泵,转向助力泵通过转向高压油管将高压油输入转向器,协助转向管柱带动转向器运转,避免单线控转向引起的转向保险丝或转向电机烧坏;
2、本发明在线控制动系统中,添加柱塞泵,替代了传统的脚踩制动踏板,柱塞泵通过油管连接至制动器总成,柱塞泵控制油管内的油压,实现对制动器总成的控制,同时油管上设置的压力传感器能够实时反馈当前整车的制动压力,制动电子控制单元和整车控制器VCU能够根据目标制动压力和当前整车制动压力,对整车制动进行精准控制;
3、本发明在电子驻车系统中,电子驻车系统在驻车电子控制单元和整车控制器VCU的控制下,整车启动或停止时,驻车电子控制单元根据整车控制器VCU发送的驻车命令,对整车进行驻车或启动,进一步保障了整车运行的安全。
附图说明
图1为一种智能驾驶线控底盘的线控转向系统结构示意图;
图2为一种智能驾驶线控底盘的线控制动系统结构示意图;
图3为一种智能驾驶线控底盘的线控制动系统柱塞泵放大示意图;
图4为一种智能驾驶线控底盘的线控转向系统与车轮的装配示意图;
图5为一种智能驾驶线控底盘的底盘本体结构示意图;
图6为一种智能驾驶线控底盘的底盘本体立体结构示意图;
图7为一种智能驾驶线控底盘的电子驻车系统结构示意图;
图8为一种智能驾驶线控底盘的控制方法的线控转向系统控制方法框图;
图9为一种智能驾驶线控底盘的控制方法的线控制动系统控制方法框图;
图10为一种智能驾驶线控底盘的控制方法的电子驻车系统控制方法框图。
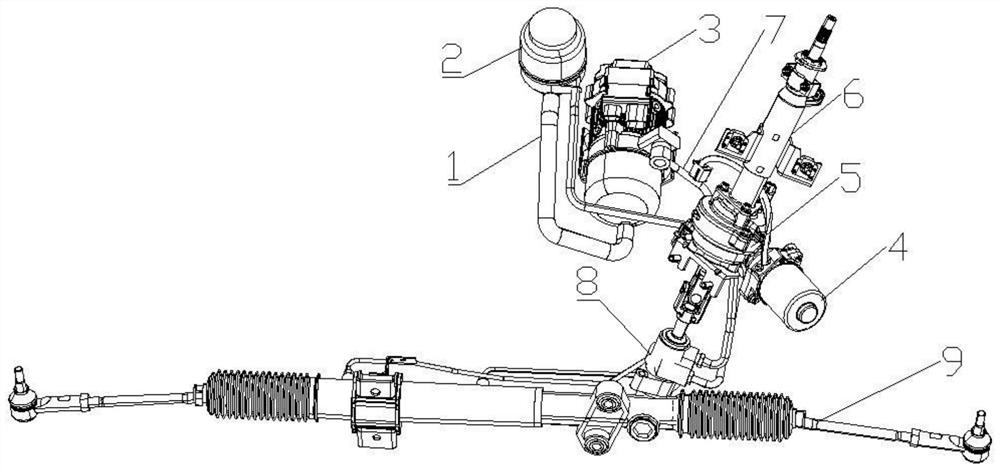
图中:1、转向低压油管,2、转向油罐,3、转向助力泵,4、助力电动机,5、转角传感器,6、转向管柱,7、转向高压油管,8、转向器,9、转向横拉杆,10、制动器总成,11,真空桶、12,制动油罐、13,真空助力器、14,电动真空助力泵、15,压力传感器、17,制动液压油管、18,制动压力调节器、19,柱塞泵、20,节臂、21,底盘本体、22,电池、23,车轮、24,驱动电机、25,制动盘、26,制动泵、27,驻车拉丝、28,电子驻车执行器。
具体实施方式
下为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中的技术方案进行清楚、完整地描述。实施例中未注明具体条件者,按照常规条件或制造商建议的条件进行。所用试剂或仪器未注明生产厂商者,均为可以通过市售购买获得的常规产品。
实施例:如图5所示,一种智能驾驶线控底盘,包括底盘本体21、电池22和整车控制器VCU,还包括线控转向系统、线控制动系统和电子驻车系统,如图1所示,线控转向系统包括转向管柱6和助力电动机4,转向管柱6与底盘本体21固定连接,转向管柱6固定连接有助力电动机4,助力电动机4与电池22和整车控制器VCU电性连接,转向管柱6下端设置有转向器8,助力电动机4连接至转向器8,转向器8下端设置有转向横拉杆9,转向器8与转向横拉杆9通过齿轮齿条传动连接,助力电动机4接通电池22后,在整车控制器VCU的控制下,驱动转向管柱7带动转向器8运转;
如图2和图3所示,线控制动系统包括制动压力调节器18、柱塞泵19和制动器总成10,制动压力调节器18与电池22和整车控制器VCU电性连接,制动压力调节器18与柱塞泵19电性连接,柱塞泵19通过油管连接至制动油罐12,柱塞泵19与制动器总成10通过制动液压油管17连接,制动压力调节器18接通电池22后,在整车控制器VCU的控制下,驱动制动电机,从而驱动柱塞泵19,控制制动液压油管17内的油压,从而控制制动器总成10;
如图7所示,电子驻车系统包括电子驻车执行器28,如图6所示,电子驻车执行器28与底盘本体21固定连接,电子驻车执行器28与整车控制器VCU电性连接,电子驻车执行器28通过驻车拉丝27与制动器总成10连接,电子驻车执行器28从整车控制器VCU获得制动指令后,驱动驻车电机,驻车电机通过驻车拉丝27控制制动器总成10。
线控转向系统中,还包括转向油罐2和转向助力泵3,转向油罐2通过转向低压油管1连接至转向助力泵3,转向助力泵3通过转向高压油管7连接至转向器8,转向助力泵3通过低压油管1将转向油罐2内的低压油吸入,借助转向助力泵3内的电机带动内部的转向叶片泵来控制阀体,实现低压油转换为高压油,高压油通过高压油管7进入转向器8内的转阀。
线控制动系统中,制动液压油管17管体上设有压力传感器15,压力传感器15与制动压力调节器18电性连接,压力传感器15与整车控制器VCU电性连接。
线控转向系统中,助力电动机4通过蜗轮蜗杆连接至转向器8。
如图4所示,底盘本体21还包括车轮23,车轮23内侧设置有节臂20,转向横拉杆9与节臂20转动连接。
线控制动系统中,制动器总成10包括制动泵26和制动盘25,制动盘25与车轮23固定连接。
电子驻车系统中,电子驻车执行器28包括驻车电机和拉力传感器,电子驻车执行器28与驻车电机固定连接,拉力传感器通过驻车拉丝27与制动器总成10连接。
一种智能驾驶线控底盘的控制方法,包括线控转向系统控制方法和线控制动系统控制方法,如图8所示,线控转向系统控制方法包括以下步骤:
S1:整车采集当前所需转向角度,并将转角信号传输至转向电子控制单元;
S2:转向电子控制单元接收到转向角度后,通过CAN总线与整车控制器VCU进行数据传输,并调节助力电动机4的转速,并输出至转向器8;
S3:转向器8在接收到助力电动机4的转角传递后,通过齿轮齿条驱动转向横拉杆9,实现转向;
步骤S1中,车载雷达摄像头对转角数据进行采集,对数据进行滤波、降噪处理,并将转角信号传输至转向电子控制单元,传感器与转向器8电性连接,对整车当前转角信息进行采集;
步骤S2中,转向电子控制单元将采集的转角信号与当前线控转向系统传感器反馈的转角信息进行比对,按照整车控制器VCU内的转向控制算法,计算出对转向电机的控制电流,进而驱动助力电动机4,助力电动机驱动转向管柱7,带动转向器8运转;
步骤S2中,转向电子控制单元接收到转向角度后,通过CAN总线与整车控制器VCU进行数据传输,对转向助力泵9内电机转速进行调节,转向助力泵9将转向油罐2内的液压油通过高压油管7输入至转向器8,转向器8通过齿轮齿条带动转向横拉杆9,实现车轮相应的转角运动,从而对线控转向系统助力,当转角数据达到目标转角指令时,转向电子控制单元停止对转向电机的控制,转向器8内的转阀归位,停止输出液压。
步骤S3中,转向横拉杆9带动车轮23内的节臂20,实现转向。
汽车行驶过程中难免碰到复杂的工况如侧向风、低附着路面等,汽车在转向过程中容易出现失稳,通过电子控制单元和整车控制器VCU采集到的整车其他方面的状态,当有失稳趋势时,通过对助力电动机4的控制,补偿合理的前轮转角使车辆恢复到稳定状态。
如图9所示,线控制动系统控制方法方法包括以下步骤:
A1:当需要对整车进行制动时,整车控制器VCU通过CAN总线向制动电子控制单元发出制动信号,制动电子控制单元驱动柱塞泵19;
A2:柱塞泵19运转后,控制调节制动液压油管17内的油压,进而驱动制动器总成10,对整车进行制动;
A3:当整车制动后,制动液压油管17上的压力传感器15向制动电子控制单元反馈跟踪制动系统的压力;
步骤A1中,制动电子控制单元采集整车当前制动压力,通过整车控制器VCU对数据进行滤波、降噪处理,对目标制动压力与当前制动压力进行差值对比,计算得出柱塞泵19的控制压力;
步骤A2中,制动电子控制单元驱动柱塞泵19的制动电机,调节制动电机输出力矩,驱动柱塞泵19控制调节制动液压油管17内的油压,实现对制动器总成10制动压力的控制;
线控制动系统控制方法还包括驻车控制系统控制方法,如图10所示,驻车控制系统控制方法包括以下步骤:
B1:整车控制器VCU向驻车电子控制单元发出驻车要求;
B2:电子驻车执行器28在接收到驻车要求后,驱动电子驻车执行器28内的驻车电机运转,通过驻车拉丝27控制制动器总成10;
B3:驻车电子控制单元通过电子驻车执行器28实时检测拉力传感器数值,拉力达到控制目标要求后,就停止对电机的控制,减速机构自动锁紧。
步骤B2中,驻车电机带动减速机构驱动控制驻车拉丝27,从而控制制动器总成10。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神和基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种智能驾驶线控底盘及其控制方法
- 一种智能驾驶线控底盘