智能服务机器人充电底座
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及机器人技术领域,具体为一种智能服务机器人充电底座。
背景技术
随着近年来经济的发展和科技的进步,机器人得到了大规模地推广和应用,服务机器人是一种半自主或全自主工作的机器人,它能完成有益于人类健康的服务工作,但不包括从事生产的设备。服务机器人的应用范围很广,主要从事维护保养、修理、运输、清洗、保安、救援、监护等工作。在服务机器人的工作区域内配置充电座,以方便其在完成工作后返回充电座进行充,然而,现有技术中实现机器人自动充电的装置结构相对复杂,成本较高,充电接头长期裸露在外容易沾染灰尘,导致充电效果不好,充电时如果有外力作用,容易导致充电中断,影响充电质量,为此,我们提出一种智能服务机器人充电底座解决上述缺陷。
发明内容
本发明要解决的技术问题是克服现有的缺陷,提供一种智能服务机器人充电底座,自动化程度高,保证了充电质量,使用方便,可以有效解决背景技术中的问题。
为实现上述目的,本发明提供如下技术方案:一种智能服务机器人充电底座,包括底座本体、防尘组件、触发组件和夹持组件;
底座本体:其顶端设有第一切槽,第一切槽的左侧面固定连接有电动推杆,电动推杆的推杆右端固定连接有连接柱,连接柱的右侧面固定连接有磁吸充电器,底座本体的中部设有空腔,底座本体的下端设有第二切槽;
防尘组件:设置于第一切槽的上端;
触发组件:包括第一接触片、弹簧、第二接触片、滑板和导杆,所述第一接触片和弹簧均固定连接于空腔的左侧面,第一接触片位于弹簧的内部,弹簧的右侧端头固定连接有滑板,滑板的外弧面与空腔的内壁面滑动连接,滑板的中部固定连接有导杆,导杆的外弧面与空腔右侧壁设置的通孔内壁滑动连接,导杆的左侧端头固定连接有第二接触片,第二接触片与第一接触片位置对应;
夹持组件:设置于第二切槽的内部;
其中:还包括单片机,所述单片机固定连接于底座本体的前侧面,单片机的输入端电连接外部电源,单片机的输出端分别电连接电动推杆和磁吸充电器的输入端,第一接触片与单片机的正极通过导线连接,第二接触片与单片机的负极通过导线连接,通过外部触发信号对智能服务机器人进行充电,自动化程度高,而且避免在充电的过程中由于外力导致充电中断,另外,还能有效防止磁吸充电器沾染灰尘,保证了充电质量,使用方便。
进一步的,所述防尘组件包括配合槽、连杆和盖板,所述配合槽设置于连接柱的弧面上端,配合槽的侧壁左端通过销轴与连杆的下端转动连接,所述盖板的左端第一切槽的上端左侧通过销轴转动连接,连杆的上端与盖板的水平部分下表面通过销轴转动连接,避免磁吸充电器的表面覆盖灰尘影响充电性能,保证磁吸充电器表面的清洁。
进一步的,所述夹持组件包括转轴、齿轮、夹爪和电机,所述转轴的外弧面两端分别与第二切槽的上表面和下表面内部转动连接,转轴有两个且对称分布,转轴侧中部固定连接有齿轮,两个齿轮啮合连接,齿轮的侧面固定连接有夹爪,两个夹爪位置对应,所述电机固定连接于底座本体的底部,电机的输出轴与后侧的转轴下端固定连接,电机的输入端电连接单片机的输出端,对智能服务机器人夹持固定,避免受到外力作用偏移而影响充电效果。
进一步的,还包括燕尾槽,所述燕尾槽对称设置于第一切槽的侧壁,燕尾槽的内壁与连接柱侧面设置的滑块外表面滑动连接,提高磁吸充电器移动使的稳定性。
进一步的,所述导杆的右侧端头设有缓冲球,避免对智能机器人的表面造成损伤,提高防护性能。
与现有技术相比,本发明的有益效果是:本智能服务机器人充电底座,具有以下好处:
智能服务机器人移动至底座本体的右端,缓冲球被向左侧挤压,缓冲球带动导杆向左侧滑动,导杆带动第二接触片向左侧移动,第二接触片与第一接触片接触时,单片机接收到输入信号,控制电动推杆启动,电动推杆的推杆向右侧推动连接柱,连接柱带动磁吸充电器向右侧移动,同时连接柱带动连杆的下端向右移动,连杆的上端带动盖板沿其左端的转轴旋转,第一切槽的右端被打开,磁吸充电器移出第一切槽与智能服务机器人的充电接口接触,对智能服务机器人充电,同时,电机带动后侧的转轴旋转,后侧的转轴带动后侧的齿轮转动,后侧的齿轮带动前侧的齿轮转动,齿轮带动夹爪转动对智能服务机器人进行夹持,避免智能机器人在充电时受到外力影响而移动影响充电效果,充电完成后,根据上述原理,电机反转使夹爪张开,弹簧的弹力带动滑板向右侧移动,第二接触片与第一接触片分开,单片机控制电动推杆收缩,盖板反方向旋转对磁吸充电器遮挡,避免磁吸充电器沾染灰尘影响充电性能,该智能服务机器人充电底座通过外部触发信号对智能服务机器人进行充电,自动化程度高,而且避免在充电的过程中由于外力导致充电中断,另外,还能有效防止磁吸充电器沾染灰尘,保证了充电质量,使用方便。
附图说明
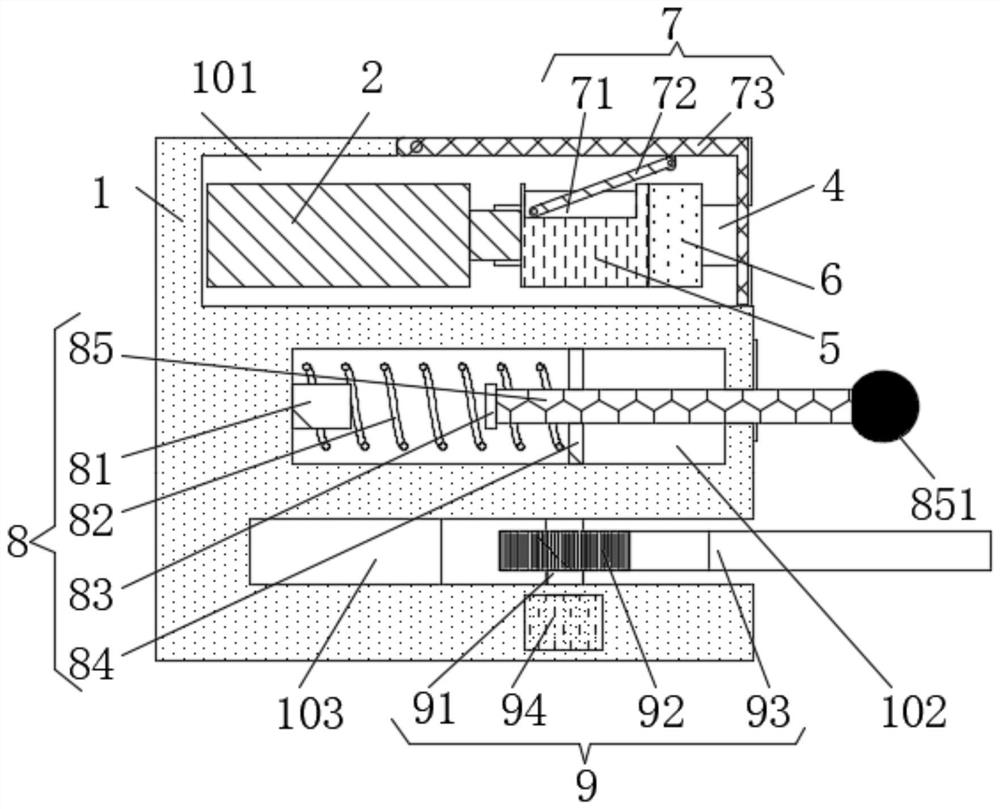
图1为本发明前视剖面结构示意图;
图2为本发明结构示意图。
图中:1底座本体、101第一切槽、102空腔、103第二切槽、2电动推杆、3单片机、4燕尾槽、5连接柱、6磁吸充电器、7防尘组件、71配合槽、72连杆、73盖板、8触发组件、81第一接触片、82弹簧、83第二接触片、84滑板、85导杆、851缓冲球、9夹持组件、91转轴、92齿轮、93夹爪、94电机。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-2,本发明提供一种技术方案:智能服务机器人充电底座,包括底座本体1、防尘组件7、触发组件8和夹持组件9;
底座本体1:其顶端设有第一切槽101,第一切槽101的左侧面固定连接有电动推杆2,电动推杆2的推杆右端固定连接有连接柱5,连接柱5的右侧面固定连接有磁吸充电器6,底座本体1的中部设有空腔102,底座本体1的下端设有第二切槽103,电动推杆2的推杆向右侧推动连接柱5,连接柱5带动磁吸充电器6向右侧移动,同时连接柱5带动连杆72的下端向右移动,连杆72的上端带动盖板73沿其左端的转轴旋转,第一切槽101的右端被打开,磁吸充电器6移出第一切槽101与智能服务机器人的充电接口接触,对智能服务机器人充电;
防尘组件7:设置于第一切槽101的上端,防尘组件7包括配合槽71、连杆72和盖板73,配合槽71设置于连接柱5的弧面上端,配合槽71的侧壁左端通过销轴与连杆72的下端转动连接,盖板73的左端第一切槽101的上端左侧通过销轴转动连接,连杆72的上端与盖板73的水平部分下表面通过销轴转动连接,单片机3控制电动推杆2收缩,盖板73反方向旋转对磁吸充电器6遮挡,避免磁吸充电器6沾染灰尘影响充电性能,保证磁吸充电器6表面的清洁;
触发组件8:包括第一接触片81、弹簧82、第二接触片83、滑板84和导杆85,第一接触片81和弹簧82均固定连接于空腔102的左侧面,第一接触片81位于弹簧82的内部,弹簧82的右侧端头固定连接有滑板84,滑板84的外弧面与空腔102的内壁面滑动连接,滑板84的中部固定连接有导杆85,导杆85的外弧面与空腔102右侧壁设置的通孔内壁滑动连接,导杆85的左侧端头固定连接有第二接触片83,第二接触片83与第一接触片81位置对应,导杆85的右侧端头设有缓冲球851,避免对智能机器人的表面造成损伤,提高防护性能,缓冲球851被向左侧挤压,缓冲球851带动导杆85向左侧滑动,导杆85带动第二接触片83向左侧移动,第二接触片83与第一接触片81接触时,单片机3接收到输入信号控制电动推杆2启动;
夹持组件9:设置于第二切槽103的内部,夹持组件9包括转轴91、齿轮92、夹爪93和电机94,转轴91的外弧面两端分别与第二切槽103的上表面和下表面内部转动连接,转轴91有两个且对称分布,转轴91侧中部固定连接有齿轮92,两个齿轮92啮合连接,齿轮92的侧面固定连接有夹爪93,两个夹爪位置对应,电机94固定连接于底座本体1的底部,电机94的输出轴与后侧的转轴91下端固定连接,电机94的输入端电连接单片机3的输出端,电机94带动后侧的转轴91旋转,后侧的转轴91带动后侧的齿轮92转动,后侧的齿轮92带动前侧的齿轮92转动,齿轮92带动夹爪93转动对智能服务机器人进行夹持,避免智能机器人在充电时受到外力影响而移动影响充电效果;
其中:还包括燕尾槽4,燕尾槽4对称设置于第一切槽101的侧壁,燕尾槽4的内壁与连接柱5侧面设置的滑块外表面滑动连接,提高磁吸充电器6移动使的稳定性。
其中:还包括单片机3,单片机3固定连接于底座本体1的前侧面,单片机3的输入端电连接外部电源,单片机3的输出端分别电连接电动推杆2和磁吸充电器6的输入端,第一接触片81与单片机3的正极通过导线连接,第二接触片83与单片机3的负极通过导线连接。
在使用时:智能服务机器人移动至底座本体1的右端,缓冲球851被向左侧挤压,缓冲球851带动导杆85向左侧滑动,导杆85带动第二接触片83向左侧移动,第二接触片83与第一接触片81接触时,单片机3接收到输入信号,控制电动推杆2启动,电动推杆2的推杆向右侧推动连接柱5,连接柱5带动磁吸充电器6向右侧移动,同时连接柱5带动连杆72的下端向右移动,连杆72的上端带动盖板73沿其左端的转轴旋转,第一切槽101的右端被打开,磁吸充电器6移出第一切槽101与智能服务机器人的充电接口接触,对智能服务机器人充电,同时,电机94带动后侧的转轴91旋转,后侧的转轴91带动后侧的齿轮92转动,后侧的齿轮92带动前侧的齿轮92转动,齿轮92带动夹爪93转动对智能服务机器人进行夹持,避免智能机器人在充电时受到外力影响而移动影响充电效果,充电完成后,根据上述原理,电机94反转使夹爪93张开,弹簧82的弹力带动滑板84向右侧移动,第二接触片83与第一接触片81分开,单片机3控制电动推杆2收缩,盖板73反方向旋转对磁吸充电器6遮挡,避免磁吸充电器6沾染灰尘影响充电性能。
值得注意的是,本实施例中所公开的单片机3具体型号为华大HC32F030单片机,电动推杆2、磁吸充电器6和电机94可根据实际应用场景自由配置,电动推杆2建议选用天津伊帕德科技有限公司出品的TA20系列电动推杆,电机94可选用东莞市摩酷机电有限公司出品的42系列步进电机,单片机3控制电动推杆2、磁吸充电器6和电机94工作采用现有技术中常用的方法。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 智能服务机器人充电底座
- 智能底座控制电子设备充电的方法及其智能底座