钻孔装置及相关的方法
文献发布时间:2023-06-19 09:54:18
相关申请的交叉引用
本申请根据35U.S.C.§119(e)要求2018年2月20日提交的标题为“DrillingDevices and Related Methods”的美国临时专利申请号62/632,554的权益,所述美国临时专利申请的全部内容通过引用结合于本文中。
技术领域
本文描述的某些实施方案总体上涉及钻孔装置,并且进一步的实施方案更具体地涉及诸如可以被用于例如钻孔进入骨中的医疗钻孔装置。
背景技术
医疗钻用于包括例如骨科手术和牙科手术在内的多种医疗手术。然而,已知的装置、系统和方法存在一个或多个缺点和/或可能不适合于提供进入骨内部的通道,诸如不适用于骨内脉管进入。而且,许多这样的医疗钻需要电能来进行操作,这在某些情形(诸如在偏远地区或长时间储存之后)下可能是不容易获得的。已知的医学钻和方法的这些和/或其他限制可以通过本文描述的某些实施方案来解决、补救、改善或避免。而且,本文在示意性医疗手术背景中公开的某些实施方案可以在包括医疗领域之外的背景的其他背景下使用。
附图说明
本文的书面公开文本描述了非限制性且非穷举性的说明性实施方案。参考附图中描绘的某些这样的说明性实施方案,在附图中:
图1是包括进入组件和驱动器的骨内进入系统的实施方案的分解正视图,所述驱动器被构造为与所述进入组件联接并且驱动所述进入组件的一部分进入患者的骨中。
图2是图1的进入组件的闭孔器组件部分的实施方案的透视图;
图3是闭孔器组件的又一个透视图;
图4是图1的进入组件的针组件部分的实施方案的透视图;
图5是针组件的沿着图4中的视线5-5截取的截面视图;
图6是图1的驱动器的透视图;
图7是驱动器的沿着图6中的视线7-7截取的透视截面视图;
图8是驱动器的壳体部分的实施方案的分解透视图,所述壳体部分包括两个分离的壳体部件;
图9是图8中描绘的壳体部件中的一个的透视图;
图10是图13的壳体部件的正视图;
图11是驱动器的近侧盖件部分的实施方案的顶部透视图,所述近侧盖件部分也可以称为卷绕盖件(winding cap);
图12是图11的近侧盖件的底部透视图;
图13是图11的近侧盖件的正视图;
图14是图11的近侧盖件的从上方观察时绕其纵向轴线沿顺时针方向旋转90度的又一个正视图;
图15是驱动器的远侧盖件部分的实施方案的底部透视图,所述远侧盖件部分在本文中也被称为手柄;
图16是远侧盖件的顶部透视图;
图17是与驱动器兼容的止挡件(stop)的实施方案的顶部透视图;
图18是与图1的驱动器兼容的驱动轴的实施方案的底部透视图;
图19是驱动轴的顶部透视图;
图20是可联接至驱动轴的闩锁构件的实施方案的顶部透视图;
图21是可联接至驱动轴的轴承的实施方式的顶部透视图;
图22是被构造为将驱动轴与偏置构件连接的联接器的实施方案的顶部透视图;
图23是被构造为将近侧盖件与偏置构件连接的联接器的实施方案的顶部透视图;
图24是处于组装状态的进入组件的截面视图;
图25A描绘了示意性方法的阶段,其中驱动器的远端被联接至进入组件;
图25B描绘了所述示意性方法的另一个阶段,并且是驱动器的远端和进入组件的在它们已经被用于刺穿患者的皮肤以使切割针的远侧尖端与所述患者的骨的外部表面接触之后的截面视图;
图25C描绘了所述示意性方法的另一个阶段,并且是驱动器的远端和进入组件的示出了偏置构件的截面视图,所述偏置构件已经被压缩了足以将驱动轴转换为旋转状态的量,在所述旋转状态下,所述驱动轴可以旋转以将所述进入组件钻入骨中;
图25D描绘了所述示意性方法的另一个阶段,并且是驱动器的远端和进入组件的在它们已经被用于提供进入患者的骨内部的通道之后的截面视图;
图26是可以例如与进入组件一起使用以用于穿入骨中的驱动器的另一个实施方案的透视图;
图27是图26的驱动器的近侧盖件部分的底部透视图;
图28是可以例如与进入组件一起使用以钻入骨中的驱动器的另一个实施方案的透视图;
图29是可以例如与进入组件一起使用以钻入骨中的驱动器的另一个实施方案的透视图;
图30是与图29的驱动器兼容的手柄的实施方案的透视图;
图31是与图29的驱动器兼容的远侧盖件的实施方案的上部透视图;
图32是远侧盖件的下部透视图;
图33是与图29的驱动器兼容的驱动轴的实施方案的下部透视图;
图34是驱动轴的远侧部分的正视图;
图35是驱动轴的上部透视图;
图36是驱动轴的近侧部分的正视图;
图37是与图29的驱动器兼容的扭转弹簧的实施方案的透视图;
图38是与图29的驱动器兼容的近侧盖件的实施方案的上部透视图;
图39是近侧盖件的下部透视图;
图40是与图29的驱动器兼容的压缩弹簧的实施方案的透视图;
图41是与图29的驱动器兼容的保持器的实施方案的透视图;
图42是与图29的驱动器兼容的轴环的实施方案的透视图;
图43是轴环的沿图42中的视线43-43截取的截面视图;
图44是图29的组装的驱动器的沿图29中的视线44-44截取的截面视图;
图45是驱动器的近端的类似于图44的截面视图的放大截面视图,所述放大截面视图示出了处于使用早期阶段的所述驱动器;
图46是当驱动器处于图45中描绘的相同的使用早期阶段时所述驱动器的远端的剖面正视图;
图47是驱动器的近端的另一个截面视图(诸如图45的视图),其中驱动器被示出处于使用后期阶段;
图48是当驱动器处于图47中描绘的相同的使用后期阶段时所述驱动器的远端的另一个剖面正视图;并且
图49描绘了包括图29的以透视图示出的驱动器,以及以正面图示出的进入组件和使用说明的套件的实施方案。
具体实施方式
本公开文本总体上涉及钻孔装置、系统和方法,并且具体地涉及医疗钻和相关方法。在一些情况下,诸如在骨科手术或牙科手术中,钻被用来钻入或钻穿骨。然而,用于骨钻孔的已知系统可能存在明显的缺点。
而且,某些已知的钻孔系统可能不适用于提供进入骨内部的通道,诸如不适用于骨内脉管进入应用。在至少一些情况下,本发明人已经意识到了期望在钻孔事件期间确保使用者向钻施加指向前方的力或远侧定向的力(例如,插入力),所述力落在预定的最佳范围内或相反超过阈值,以达到最佳钻孔效率。换言之,在至少一些情况下,确保使用者施加在所述预定的最佳范围内的或相反超过所述阈值的指向前方的力或远侧定向的力可以在穿透器尖端产生用于切穿皮质骨最合适的扭矩。本文描述的某些实施方案可以有利地确保钻孔在优化的力和/或扭矩范围内发生,和/或可以实现本文所讨论的或者从本公开文本中以其他方式将是显而易见的其他的和/或进一步的优点。
尽管某些实施方案特别地适于医疗钻孔以实现骨内进入,但是本公开文本不限于此。例如,一些实施方案可以适用于其他医疗应用,诸如用于骨活检、骨科手术,或牙科手术的骨钻孔。另外其他或进一步的实施方案可以适用于非医疗应用。
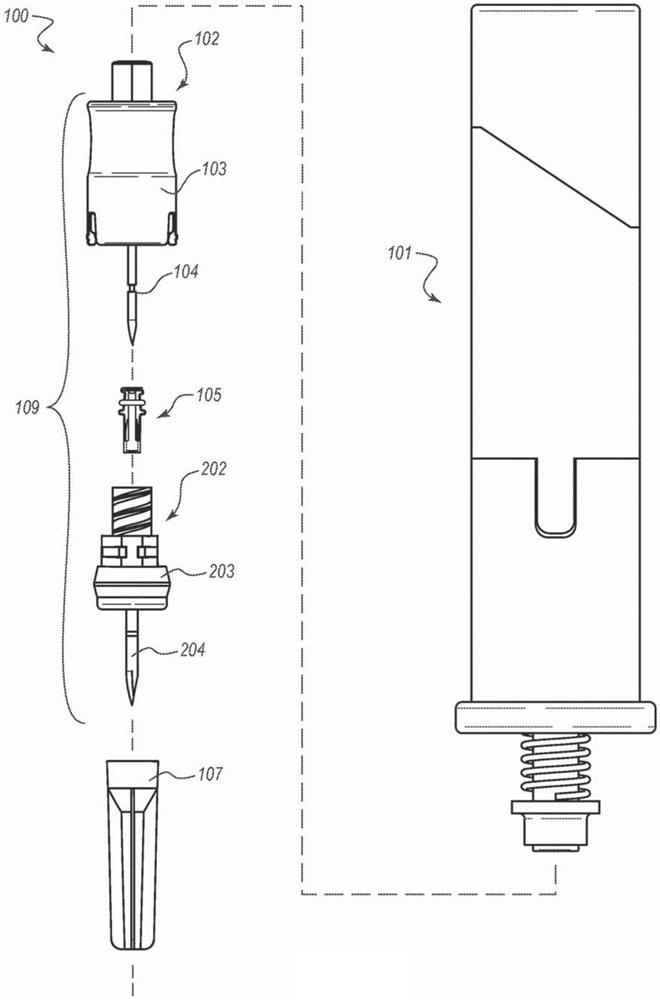
图1是骨内进入系统100的实施方案的分解正视图。骨内进入系统100可用于穿透皮肤和下面的硬骨以进行骨内进入,诸如例如经由穿过骨内部的通路进入患者的骨髓和/或脉管系统。
在各种实施方案中,系统包括驱动器101和进入组件109。驱动器101可以被用于将进入组件109旋转到患者的骨中。如下文进一步讨论的,驱动器101可以被机械地供电,诸如经由将储存的机械势能转换为动能。在进一步情况下,驱动器101可以是自动化的。例如,驱动器101可以被预卷绕、预加载的、预装载,或以其他方式置于储存的机械能的状态,并且当满足某些预定条件时所述储存的能量可被自动释放以将进入组件109钻入骨中。当被供电和/或被自动化时,驱动器101可以实现适合于高效地切穿骨(例如,皮质骨)的转速。在某些情况下,所述转速可以远远超过仅仅通过手动操作钻(例如,仅仅经由手动旋转)可获得的速度。在其他或进一步的实施方案中,驱动器101可以在手动模式下使用,以手动地将进入组件109部分地或完全地插入骨中。例如,驱动器101可以被构造为作为动力钻和/或自动钻使用,但是可以可选地以完全手动模式使用,如下面进一步讨论的。
骨内进入系统100,或更具体地进入组件109可以包括闭孔器组件102、安全护罩105和针组件202。换言之,闭孔器组件102、安全护罩105和针组件202可以统称为进入组件109。进入组件109也可以被称为进入系统、穿透系统或穿透组件、插入系统或插入组件等。
考虑到在展示的实施方案中,闭孔器组件102包括闭孔器104,为方便起见,闭孔器组件102在本文中被称为这样。然而,在各其他实施方案中,可以用不同的细长医疗器械代替闭孔器104。如本文所使用的,术语“细长医疗器械”是在其通常意义上使用的广义术语,包括例如诸如针、插管、套管针、闭孔器、管心针等的装置。因此,闭孔器组件102可以更通常地被称为细长的医疗器械组件,因为任何合适的细长医疗器械被设想用于与闭孔器104结合使用或代替闭孔器104使用。以类似的方式,闭孔器104可以更通常地被称为细长医疗器械。
在展示的实施方案中,封闭器组件102包括以任何合适的方式(例如,一种或多种粘合剂或包覆模制)附接到闭孔器104的联接毂103。联接毂103可以被构造为与驱动器101接口连接,如下面进一步讨论的。可替代地,联接毂103可以被称为闭孔器毂103,或者更通常地,被称为细长器械毂103。
在展示的实施方案中,护罩105被构造为与闭孔器104联接。联接方式在护罩105处于第一操作模式时可以允许闭孔器104与护罩105之间的相对纵向运动,诸如滑动、平移,或沿着伸长轴轴线的其他运动(即,轴向运动),并且在护罩105转换为第二操作模式时可以阻止相同种类的运动。例如,当闭孔器104将护罩105维持在解锁状态时,护罩105可以以允许纵向平移的方式与闭孔器104联接,并且当闭孔器104移动到其不再将护罩105维持在所述解锁状态的位置时,护罩105可以自动转换至锁定状态,在所述锁定状态下,几乎不或不允许护罩105与闭孔器104之间的平移运动。换言之,护罩105可以相对于闭孔器104被纵向锁定到固定的或基本上固定的纵向定向,在所述固定纵向定向中,护罩105禁止或防止与闭孔器的远侧尖端的无意接触。
继续参考图1,为方便起见,本文将针组件202称为这样。在展示的实施方案中,针组件202包括针204。然而,在各种其他实施方案中,针204可以用不同的器械(诸如例如,插管、管或鞘)来代替,和/或可以用不同的名称来指代,诸如前述实施例中的一个或多个。因此,针组件202可以更通常地被称为插管组件或被称为管组件。以类似的方式,针204可以更通常地被称为插管。
在展示的实施方案中,针204是切割元件或切割插管,其包括用于切穿骨的一个或多个切割面,如下面进一步讨论的。闭孔器104不是切割器械,而是禁止材料进入由针204限定的内腔。在其他实施方案中,可以用诸如套管针的切割器械代替闭孔器104。可以设想用于进入组件109的任何合适的切割布置。
在展示的实施方案中,针组件202包括以任何合适的方式附接到针204的针毂203。针毂203可以被构造为与闭孔器毂103联接,并且进而可以与驱动器101联接,如下面进一步讨论的。针毂203可以替代地被称为插管毂203。
在展示的实施方案中,护罩105被构造为与针毂203联接。所述联接在护罩105处于第一操作模式时可以防止针毂203与护罩105之间的相对轴向运动或相对纵向运动(诸如滑动、平移等),并且在护罩105转换为第二操作模式时可以允许护罩105与针毂203解联接。例如,当闭孔器104将护罩105维持在解锁状态时,护罩105可以与针毂203联接以便相对于其被维持在基本固定的纵向位置,并且当闭孔器104被移动到其不再将护罩维持在所述解锁状态的位置时,护罩105可以相对于闭孔器104自动转换至锁定状态,在所述锁定状态下,护罩105同样与针毂203解联接。
护罩105可以与闭孔器104联接,闭孔器104可以插入针204中,并且闭孔器毂103可以联接到针毂203以组装进入组件109(参见图24)。在展示的实施方案中,可以提供盖件107以在使用进入组件109之前至少覆盖针204和封闭器104的远侧部分。例如,如下面进一步讨论的,在展示的实施方案中,盖件107的近端可以与闭孔器毂103联接。
参照图2、图3和图24,更详细地示出了包括闭孔器毂103和闭孔器104的闭孔器组件102。在展示的实施方案中,闭孔器毂103包括主体或壳体120。壳体120的近端可以与联接接口122联接(例如,可以附接到或者可以自身限定),以用于与驱动器101的对应的联接接口联接,如下面关于图6和图7进一步讨论的。在展示的实施方案中,联接接口122形成为轴123,轴123被构造为被容纳在由自动驱动器101的驱动轴320限定的插座329的腔内(参见图6和图7)。具体地,轴123可以与插座329接口连接,从而借其旋转。在展示的实施方案中,轴123限定与插座329的六边形截面互补的六边形截面。可以设想任何其他合适的布置。在进一步的实施方案中,插座329和轴123可以颠倒,因为驱动器101可以包括轴,并且闭孔器毂103可以限定插座以用于容纳驱动器101的轴。
闭孔器毂103的联接接口122可以进一步包括磁性构件124,所述磁性构件可以促进分别与闭孔器毂103的联接接口122和驱动器101的联接接口328的联接和/或可以加强所述联接接口之间的联接。在各种实施方案中,磁性构件124可以包括例如铁磁材料和铁磁体中的一种或多种。在一些实施方案中,插座329可以包括与磁性构件124磁性联接的类似的磁性构件(例如,包括铁磁材料和/或铁磁体)。例如,在一些实施方案中,磁性构件124可以包括磁体,并且插座329可以包括在插座329的基座处的互补磁性构件327(参见图25A)。在其他实施方案中,插座329本身可以形成为磁性构件。例如,在一些实施方案中,磁性构件124可以包括磁体,并且插座329可以由吸引磁性构件124的磁性材料形成。在另外其他实施方案中,可以省略磁性构件124。
继续参照图2、图3和图24,主体或壳体120可以进一步限定握柄126,所述握柄可以促进操纵闭孔器毂103。例如,在展示的实施方案中,握柄126形成为跨越壳体120的整个周界的侧壁128的缩进区域。
展示的闭孔器毂103包括从壳体120的中心部分向远侧延伸的裙部130。在展示的实施方案中,裙部130由侧壁128的远侧部分限定。裙部130可以包括被构造为将闭孔器毂103选择性地联接到针毂203的一个或多个机械联接构件131。在展示的实施方案中,裙部130在其相反侧包括两个这样的机械联接构件131。具体地,展示的实施方案包括能够在侧向方向或径向方向上弹性变形的两个弹性臂或突起132。每个臂可以包括在其内侧的可以与针毂203接口连接以实现联接构造的卡扣接口、向内突出部,或锁扣134。
在展示的实施方案中,闭孔器毂103进一步包括一对向外突出部136,一对向外突出部可以有助于将盖件107联接到闭孔器毂103。例如,在一些实施方案中,盖件107可以限定仅略大于裙部130的外径的内径。向外突出部136可以使盖件107的近端从基本上圆柱形状稍微变形为更椭圆的形状,这可以增强盖件107对裙部130的抓握。可以设想用于盖件107的任何其他合适的连接布置。
参照图3和图24,侧壁128可以进一步限定联接接口137,所述联接接口被构造为以以下方式将闭孔器毂103联接到针毂203:使闭孔器毂103与针毂203一致地旋转。在展示的实施方案中,联接接口137形成为插座138,针毂203的轴部可以被容纳在所述插座中。插座138可以限定键形形状,所述键形形状允许闭孔器毂103仅以一个独特的旋转定向或角度定向联接至针毂203。具体地,在展示的实施方案中,插座138限定细长的正八角棱柱,其五个邻接边的大小基本上完全相同,从所述五个邻接边的端部延伸的两个增大边相对于所述五个邻接边延长,并且在所述两个增大边之间延伸的第八短边比所述五个邻接边短。可以设想任何其他合适的键接构造。如下面进一步讨论的,在一些实施方案中,诸如刚才描述的键形接口可以确保闭孔器104和针204以可以期望的方式彼此联接,诸如以确保两个部件的远侧面基本上彼此平行和/或以其他方式确保闭孔器104的远侧面相对于针204的远侧面以期望的方式被定位。例如,在一些实施方案中,键形接口确保闭孔器104的远侧面和针204的远侧面基本上彼此平行和/或确保闭孔器104的远侧面相对于针204的远侧面完全凹陷。
继续参考图3,在一些实施方案中,闭孔器104在联接至闭孔器毂103的近端140与远端142之间延伸。闭孔器104的远端142在其极端处具有远侧尖端146。在展示的实施方案中,闭孔器毂103的壳体120基本上包围闭孔器104的近端140。
闭孔器104的远端142包括远侧面147,在各种实施方案中,远侧面147可以替代性地被称为切割面、研磨面,或成角度面。在一些实施方案中,远侧面147形成为相对于闭孔器104的中心纵向轴线成一定角度的斜面。例如,在展示的实施方案中,远侧面147限定基本上平坦的斜面。在一些实施方案中,闭孔器104的远侧面147可以被构造为相对于针204的远侧面凹陷。
倾斜的远侧面147可以以任何合适的方式形成,诸如通过研磨。例如,基本上平坦的远侧面147可以通过偏置研磨(其也可以称为简单偏置研磨)形成。如下面进一步讨论的,在一些实施方案中,研磨远侧面147形成(例如,研磨)于基本上圆柱形的杆的远端处,并且在已经形成远侧面147之后将所述杆弯折。在其他实施方案中,圆柱形杆在形成远侧面147之前被弯折。在另外其他实施方案中,不弯折圆柱形杆,而是通过研磨形成远侧面147和与其邻近的弯曲区域或修圆区域148中的每个。可以设想用于形成闭孔器104的远端142的其他合适工艺。
在一些实施方案中,闭孔器104可以是实心的。例如,闭孔器104可以完全没有延伸穿过其任何部分的通道或开口。类似地,闭孔器104的远端142可以是基本上实心的或闭合的,并且可以没有在其中或穿过其中的开口或通道。闭孔器104的远端142可以基本上填满针204的内腔,或者至少所述内腔的远侧部分,以防止在插入事件期间皮肤或骨进入针204。
闭孔器104可以由任何合适的材料形成,诸如可以抵抗弯曲的基本上刚性的材料。所述材料可以具有足够的刚性和强度以在进入事件期间阻止组织和/或骨进入针204的内腔。在各实施方案中,闭孔器104可以包括刚性塑料或不锈钢中的一种或多种。在一些情况下,闭孔器104可以在插入事件期间向针204提供内部支撑或结构支撑。例如,闭孔器104可以充当加固件或管心针以在钻孔期间阻止针204的弯曲。
闭孔器104的远端142的形状和大小可以被设计成基本上填满针204的远端,如图24中所示出的。在各种实施方案中,这种布置可以阻止针204的远端的弯曲或变平。例如,在一些实施方案中,针204的远侧尖端的内壁与闭孔器104的远端142的外表面之间可以紧密配合,并且这些表面之间的接触可允许闭孔器104加强针204。例如,在展示的实施方案中,闭孔器104的远端142包括弯曲区域148,所述弯曲区域还可以被称为修圆区域、弯折区域,或弯曲区域或者称为弯曲表面。弯曲表面148的轮廓可以在针204的远端紧密匹配针204的内壁的轮廓。例如,在各种实施方案中,这些弯曲表面可以沿着闭孔器104的弯曲表面148的一部分或基本上整个长度和/或针204的远端的内弯曲表面的一部分或基本上整个长度彼此接触。
在其他情况下,在闭孔器104的远端142和针头204的远端的内表面之间可能存在小的空间或间隙。在某些这样的布置中,闭孔器104的远端142最初可能不提供抵抗针尖端弯折的阻力。然而,闭孔器104可以代替防止针尖端弯折超过预设量。例如,在针尖端弯曲使得内壁与闭孔器104的远端142接触时,闭孔器104可以停止或阻止所述针尖端的进一步弯折。
在展示的实施方案中,闭孔器104可以进一步包括凹部150。凹部150可以位于闭孔器的近端与远端142之间的位置。换言之,凹部150可以相对于闭孔器104的远侧尖端146定位在近侧。凹部150可以是任何合适的种类,诸如凹槽、轨道,或与例如闭孔器104接近凹部150的部分相比内缩或具有减小的直径或减小的厚度的任何其他合适区域。凹部150可以或可以不完全围绕闭孔器104的纵向轴线延伸。在展示的实施方案中,凹部150被限定为完全绕闭孔器的纵向轴线延伸的凹槽151。
参照图4、图5和图24,如先前所讨论的,针组件202可以包括针毂203和针204,所述针毂和所述针可以以任何合适的方式(例如,一种或多种粘合剂或包覆模制)彼此牢固地固定。进一步,如先前所讨论的,针毂203和针204可以更通常地分别被称为插管毂和插管。
在展示的实施方案中,针毂203包括壳体或主体208。主体208可以限定被构造为与闭孔器毂102的联接接口137(参见图3)联接的联接接口210。例如,联接接口210可以形成为轴212,轴212被构造为被容纳在闭孔器毂102(参见图3和图24)的插座138内。如图4中所示出的,在一些实施方案中,轴212可以限定键形形状,所述键形形状允许针毂203仅以一个独特的旋转定向或角度定向联接到闭孔器毂103。具体地,在展示的实施方案中,轴212限定细长的正八角棱柱,其五个邻接边的大小基本上完全相同,从所述五个邻接边的端部延伸的两个增大边相对于所述五个邻接边延长,并且在所述两个增大边之间延伸的第八短边比所述五个邻接边短。棱柱形状可以与由联接接口137所限定的形状基本相同,但具有略短的边。可以设想任何其他合适的键接构造。
针毂202可以进一步包括任何合适种类的连接器220,例如医疗连接器。连接器220可以由壳体208限定,并且可以从轴212向近侧延伸。连接器220可以被构造为在将针204插入骨之后与任何合适的医疗装置联接,诸如以用于将流体注入到患者体内和/或从患者体内抽吸流体。例如,在展示的实施方案中,连接器220形成为鲁尔接头221(即,凹鲁尔接头)。展示的鲁尔接头221包括限定腔或内腔224的侧壁222。在一些实施方案中,当针毂202在使用中时,凸鲁尔接头的一部分可以被容纳在内腔224内。连接器220的内腔224可以与针头204的内腔251流体连通。
在展示的实施方案中,侧壁222限定连接接口226,所述连接接口被构造为当护罩105相对于闭孔器104处于解锁状态时将针毂202与护罩105联接。在这种状态下,护罩105还可以被称为相对于针毂202处于锁定状态或接合状态。例如,在展示的实施方案中,连接接口226形成为环形凹槽227,护罩105的向外突出部可以被容纳在环形凹槽227中,以防止护罩105相对于针毂202在至少纵向方向上移动。
壳体208可以进一步限定裙部228,所述裙部可以从轴212向远侧延伸。裙部228还可以相对于轴212向外延伸。裙部228可以限定毂202的最大横向周界230。在展示的实施方案中,最大横向周界230基本上是圆形的。最大横向周界230表示当从上方或下方观察(或者换言之,沿着针组件202的纵向轴线观察)组件202时针组件202的轮廓。
参照图5,侧壁222的上部内部区域可以限定内腔224的最大横向直径232。在展示的实施方案中,最大横向周界232基本上是圆形的。在其他实施方案中,最大横向周界232可以由侧壁222的位于内腔224中进一步向下的部分限定,并且例如可以不在针毂203的顶视平面图中可见。在另外其他实施方案中,最大横向周界232表示当从上方观察(或者换言之,沿针组件202的纵向轴线观察)组件202时内腔224的轮廓。
继续参照图5,针204可以包括近端240和远端242。近端240终止于近侧尖端244,并且远端242终止于远侧尖端246。远侧尖端246还可以被称为针204的最远点。近端240可以以任何合适的方式牢固地固定到壳体208。针204可以由任何合适的材料形成。例如,在一些实施方案中,针204是由诸如304不锈钢、316不锈钢的不锈钢或任何其他合适等级(例如,诸如可以被用于皮下注射针)的不锈钢形成的。这些材料可以令人期望地具有足够的刚性以刺穿组织层并且穿透硬骨。
参照图5,针204的远端242可以包括远侧面247,在各种实施方案中,所述远侧面可以替代性地被称为切割面、研磨面,或成角度面。在一些实施方案中,远侧面247被形成为相对于针204的中心纵向轴线A
图6和图7描绘了与系统100兼容的驱动器101的实施方案。驱动器101可以特别地适用于将进入组件109引入到患者的骨中。驱动器101也可以被称为钻。
驱动器101的展示的实施方案包括壳体300、近侧盖件302和远侧盖件304。由于在下文中将显而易见的原因,壳体300还可以或替代性地被称为主体、轴、柄、中间结构、毂、基座、平移基座/旋转基座、芯等;近侧盖件302也可以或者替代性地被称为卷绕盖件、张紧盖件、旋转盖件、旋转元件等;并且远侧盖件304也可以或者替代性地被称为滑动盖件、调节(例如,力调节)盖件、平移盖件、推进元件等。进一步,近侧盖件302也可以或替代性地被称为用作刻度盘、抓握部或握柄302和/或远侧盖件304也可以或替代性地被称为手柄304。对于本文公开的这些部件和其他部件,基于它们的功能、结构等,除了本文明确叙述的那些之外的其他称谓也是可能的。
壳体300可以包含或包围驱动器101的大量一个或多个内部部件。壳体300可以由多个部件形成。在展示的实施方案中,壳体300包括两段:壳体部件308a和壳体部件308b。在展示的实施方案中,如下面进一步讨论的,壳体部件308a、壳体部件308b彼此相同。每个都可以被称为半壳体。在一些情况下,利用多个相同的部件来形成壳体可以促进和/或减少驱动器101的制造成本。
壳体部件308a、壳体部件308b可以配合以限定近侧腔310(图7),近侧腔310也可以被称为扭转腔、驱动腔或储能腔。近侧腔310的尺寸可以被设计成在其中容纳机械储能装置312。顾名思义,机械储能装置312可以包括能够储存能量的任何合适的机械装置。例如,在一些实施方案中,机械储能装置312可以是可移位的、可变形的或以其他方式可改变的,以从自然状态或静止状态转换为加载状态或储能状态,在所述加载状态或储能状态中装置312储存随后可以被转换成机械动能的势能。机械储能装置312也可以被称为旋转偏置构件。例如,当处于加载状态时,装置312或旋转偏置构件可以向驱动轴320提供旋转偏置。
在展示的实施方案中,机械储能装置312包括扭转弹簧314。扭转弹簧314可以联接至近侧盖件302。在展示的实施方案中,扭转弹簧314的近端经由近侧联接块316与近侧盖件302联接,所述近端联接块也可以被称为联接构件。扭转弹簧314可以限定延伸穿过其中的纵向腔。
扭转弹簧314也可以联接至驱动轴320,这将在下文中更详细地讨论。在展示的实施方案中,扭转弹簧314的远端经由远侧联接块318联接至驱动轴320,所述远侧联接块318也可以被称为联接构件。驱动轴320可以完全位于扭转弹簧314的纵向腔的外部,或者可以延伸穿过纵向腔的至少一部分。在展示的实施方案中,驱动轴320仅延伸穿过扭转弹簧314的纵向腔的一小部分。
继续参照图6和图7,驱动轴320延伸穿过联接至壳体300的远端的手柄304。具体地,手柄304覆盖或包围壳体300的远端。手柄304可以与壳体300的远端配合以限定远侧腔311。远侧腔311也可以被称为旋转控制腔。
参照图7,驱动轴320可以包括选择性接合的止动机构,诸如离合器(clutch)322。选择性接合的止动机构可以被构造为接合与手柄304相关联或以其他方式联接至手柄304的止挡件324,诸如离合器接收器。在展示的实施方案中,止挡件324包括与离合器322互补并且可接合的离合器接收器,离合器322由驱动轴320限定或以其他方式联接至驱动轴320。
驱动轴320还可以联接至位于近侧腔310内的诸如垫圈325的定位元件或轴承323。在展示的实施方案中,垫圈325被牢固地固定(例如,永久地粘附)到驱动轴320。在展示的实施方案中,垫圈325位于由壳体300限定的平台或分隔件340的近侧。换言之,分隔件340位于(例如,夹置在)离合器322的上表面和垫圈325的下表面之间。在一些实施方案中,一个或多个减少摩擦元件可以位于离合器322与分隔件340之间和/或在分隔件340与垫圈325之间。例如,可以设想任何合适的减少摩擦层或涂层(例如,特氟龙膜或特氟龙涂层)、轴承或其他减少摩擦的部件,其可以在驱动轴320的旋转期间减少分隔件340与位于分隔件340两侧的部件之间的摩擦。
再次参照图6和图7,驱动轴320可以例如在其远端处限定联接接口328。联接接口328可以被构造为与闭孔器毂103(图2)的联接接口122选择性地联接。在展示的实施方案中,联接接口328包括插座329,所述插座与闭孔器毂103的联接接口122互补并且被构造为与联接接口122接合。具体地,如先前所描述的,插座329的形状与轴123相同并且仅略大于(以便实现例如紧密配合、紧贴配合或紧配合)轴123。
可以以任何合适的方式将侧向突出的轴环330牢固地固定至驱动轴320。轴环330可以用作可以接触偏置构件332的远端的止挡件。偏置构件332还可以或替代性地被称为纵向偏置构件、分离偏置构件、调节构件、力控制构件、钻孔优化构件等。在展示的实施方案中,偏置构件332包括压缩弹簧334。压缩弹簧334可在轴环330与手柄304之间延伸。在展示的实施方案中,压缩弹簧334的远端压靠在轴环330的近侧面上,并且压缩弹簧334的近端压靠在手柄304的远侧外部表面上。
如下面进一步讨论的,压缩弹簧334可以被构造为确保驱动器101实现高效钻穿骨。例如,压缩弹簧334可以设置、确定或调节自动允许开始钻孔的力。在其他或进一步情况下,压缩弹簧334可以确保在开始之后,钻孔仅在远侧定向的力的设定范围内继续进行。压缩弹簧334可以抵抗驱动轴320上的近侧定向的力,所述近侧定向的力诸如可以在联接至驱动轴320的进入组件109被压靠在骨上时被施加至驱动轴。
参照图8,如先前所讨论的,壳体300可以包括两个壳体部件308a、308b。壳体部件可以彼此相同。每个可以限定单独的腔310a、腔310b,使得当壳体部件308a、壳体部件308b被放在一起时,它们限定先前描述的近侧腔310的至少一部分。类似地,壳体部件308a、壳体部件308b中的每个可以限定单独的腔311a、腔311b,使得当将壳体部件308a、壳体部件308b放在一起时,它们限定先前描述的远侧腔311的至少一部分。
每个壳体部件308a、壳体部件308b限定分隔件340的一部分。具体地,壳体部件308a限定分隔件段340a,并且壳体部件308b限定分隔件段340b。在展示的实施方案中,每个分隔件段340a、340b基本上是半圆形的,并且每个都限定凹部342a、凹部342b。当将壳体部件308a、壳体部件308b放在一起时,所得到的分隔件340(即,分隔件段340a、分隔件段340b的组合)基本上限定具有开口342(即,凹部342a、凹部342b的组合)的环,驱动轴320可以通过所述开口延伸,如图7中所示出的。
图9和图10描绘了壳体部件308b的外部。壳体部件308b可以限定两种厚度。在壳体部件308b的远端和近端,所述厚度可以小于在扩张区域或加厚区域350处的厚度。较窄的近端可以容易地在其上容纳近侧盖件,而较窄的远端可以容易地在其上容纳远侧盖件,如图6和图7中所示出的。加厚区域350可在其近端和远端二者处限定活动表面或作用表面,以分别与近侧盖件302和远端盖204相互作用。
具体地,在展示的实施方案中,加厚区域350的近端限定也可以被称为凸轮表面的斜坡(ramp)352。斜坡352可以限定相对于水平面(在图10的定向中)或者换言之相对于垂直于壳体部件308b的纵向轴线的侧面的角度α。斜坡352可以进一步在纵向方向上限定高度H
与斜坡352的上端邻近,加厚区域350还限定止挡件或抵接部(abutment)353(也参见图8)。抵接部353可以纵向延伸与高度H
在展示的实施方案中,加厚区域350的远端限定纵向延伸的止挡件或凸片354。凸片354在纵向方向上限定高度H
如前所述,壳体部件308a可以与壳体部件308b相同。相应地,壳体部件308a可以包括关于壳体部件308b所讨论的每个特征(诸如加厚区域350及其相关特征)。
参照图11至图14,在某些实施方案中,近侧盖件302限定在其中容纳壳体300的近端的腔360。盖件302可以进一步限定一对臂362、364。每个臂362、364可以限定活动表面或作用表面,所述活动表面或作用表面被构造为与由壳体部件308a、壳体部件308b的加厚区域350的远端限定的作用表面相互作用。具体地,每个臂362、364可以限定斜坡或凸轮表面366,所述斜坡或凸轮表面被构造为与壳体部件308a的斜坡或凸轮表面352以及与壳体部件308b的斜坡或凸轮表面352交替地相互作用。每个臂362、364同样可以限定可以与壳体部件308a、壳体部件308b的抵接部353相互作用的止挡件或抵接部368。在一些实施方案中,每个抵接部368可以限定与由壳体部件308a、壳体部件308b的抵接部353所限定的高度相同的高度H
近侧盖件302可以进一步限定被构造为与联接块316联接的联接延伸部370。例如,在展示的实施方案中,联接延伸部370限定具有正方形轮廓的凹部372,互补的方形成形的联接块316(参见图23)可以被容纳在所述凹部372中。联接块316可以以任何合适的方式在凹部372内附接到近侧盖件302。在其他实施方案中,联接块316可以与近侧盖件302一体形成,或者换言之,近侧盖件302和联接块316可以被一体形成为一体部件和/或近侧盖件302本身可以限定联接块316的一个或多个特征。在本段中讨论的每个情况下,可以被说成是近侧盖件302与联接块316联接。
参照图15和图16,手柄304可以限定开口380,驱动轴320可以延伸穿过开口380。在其内部,手柄304可以限定用于容纳止挡件324的凹部382。在展示的实施方案中,凹部382限定与止挡件324的八边形轮廓互补的八边形轮廓。这样的布置可以防止止挡件324相对于手柄304旋转。换言之,止挡件324可以被附接到手柄304,以便相对于盖件旋转地固定。对于,可以设想止挡件324的和凹部382的任何其他合适的构造(互补的或其他方式的)。在一些实施方案中,止挡件324可以与手柄304一体形成为单个一体部件和/或手柄304本身可以限定止挡件324的一个或多个特征。在本段中所讨论的每个情况下,可以说成是手柄304与止挡件324联接。
手柄304可以进一步限定在其中可以容纳壳体300的远端的腔384。腔384的下端可以限定驱动器101的先前关于图7所讨论的远侧腔311的一部分。
手柄304可进一步限定一对狭槽386,所述狭槽被构造为与由壳体300限定的凸片354相互作用,以防止手柄304相对于壳体300旋转。狭槽386和凸片354一起可以用作旋转限制器387,所述旋转限制器可以限制手柄304相对于壳体300可以表现出的旋转量。狭槽386可以允许壳体300与壳体304之间的相对纵向平移。换言之,旋转限制器387可以允许手柄304与壳体300之间的平移或相对纵向运动。在展示的实施方案中,凸片354位于手柄304的径向相对侧。在一些实施方案中,每个凸片354的深度至少与由凸片354限定的高度H
手柄304可以进一步限定向外突出部或搁板388,这可以促进驱动器101的使用。例如,使用者可以在搁板388上向下或向远侧按压以致动驱动器101。搁板388可以增强使用者在手柄304上的抓握或紧握。
参照图17,止挡件324可以限定中心开口390,驱动轴320可以延伸穿过所述中心开口。止挡件324可进一步限定被构造为防止驱动轴320沿至少一个方向旋转的一个或多个止动表面(stopping surface)392。在展示的实施方案中,止挡件324限定多个止动表面392,所述多个止动表面被构造为当止挡件324与驱动轴320接合或者更具体地与离合器322接合时防止驱动轴320的顺时针旋转,驱动轴320被牢固地固定至离合器322。在展示的实施方案中,每个止动表面392由与延伸穿过开口390的纵向轴线相比基本上竖直的面限定。例如,在各种实施方案中,由每个止动表面392限定的平面可以沿着所述纵向轴线相交或者可以平行于所述纵向轴线延伸。止挡件392可进一步限定可以取决于施加于其上的纵向力的量而选择性地允许或防止离合器322的逆时针运动的一个或多个成角度表面或凸轮表面或斜坡393,如下面进一步讨论的。
展示的止挡件324形成为被构造为与离合器322相互作用固定离合器接收器。止挡件324包括限定止动表面392和斜坡393的多个齿394。具体地,每个齿394包括止动表面392和斜坡393。
在一些情况下,止挡件324和离合器322可以用作棘轮系统。例如,在展示的实施方案中,当与离合器322的互补表面接合时,齿394的基本竖直定向的止动表面392防止顺时针旋转,但是在一些情况下,齿394的斜坡393可以与离合器322的互补表面相互作用以向近端推动离合器322并且允许离合器322逆时针旋转。例如,再次参照图7,可以通过经由驱动轴320而不是经由卷绕盖件302来卷绕(例如,旋转地移位)扭转弹簧314来增加由扭转弹簧314储存的势能的量,并且该卷绕可以如下面进一步讨论的那样以棘轮方式继续进行。
在其他或进一步情况下,止挡件324和离合器322可以锁定以防止驱动轴320的顺时针旋转和逆时针旋转。例如,再次参照图7,在展示的实施方案中,当壳体300的分隔件340维持离合器322与止挡件324接合时,止动表面392和斜坡393与离合器322的互补表面相互作用,以防止驱动轴320的顺时针旋转和逆时针旋转,如下面进一步讨论的。
参照图18,驱动轴320包括离合器322。离合器322可以与驱动轴320一体形成,或者可以以其他方式被牢固地固定到驱动轴320(例如,离合器322可以以任何合适的方式与驱动轴320牢固地联接)。在展示的实施方案中,离合器322限定被构造为以前述方式与止挡件324的齿394相互作用的多个齿400。每个齿400可以包括与离合器接收器324的止动表面392相互作用以防止离合器部件的相对旋转的止动表面402。每个齿400可以同样限定与离合器接收器324的一个或多个斜坡393相互作用的斜坡403,以取决于将力施加到驱动器101的方式和位置而选择性地允许或阻止离合器部件的旋转,如下面进一步讨论的。
参照图19,驱动轴320进一步限定大致盘形区域或环410。如先前所讨论的,壳体300的分隔件340可以位于环410与垫圈325之间。在一些情况下,环410可以防止壳体300与驱动轴320之间的相对纵向平移。例如,参照图7,如果使用者握住手柄304(例如,仅手柄304)并且以足够的力向前(即,在远侧方向)压靠在骨上,则所述骨的反作用力可以向近侧推压驱动轴320。因此,驱动轴320的环410可以在壳体300的分隔件340上向近侧推压,这可以使壳体300相对于手柄304向近侧移动。驱动轴320和壳体300二者都可以相对于手柄304沿近端方向一致地移动。
驱动轴320可以进一步限定具有正方形轮廓的凹部412,在凹部412中可以容纳成方形的联接块318(参见图22)。联接块318可以以任何合适的方式附接到凹部412内。在其他实施方案中,联接块318可以被结合到驱动轴320中,或者换言之,驱动轴320和联接块318可以一体形成为一体部件和/或驱动轴320本身可以限定联接块318的特征。在本段中讨论的每个情况下,可以说成是驱动轴320与联接块316联接。
参照图20,轴环330可以限定侧向突出表面或臂架420,压缩弹簧334的远端可以压靠所述侧向突出表面或臂架。在一些实施方案中,侧向突起表面或臂架420可以替代地由驱动轴320的一部分限定,或者换言之,可以与驱动轴320一体形成。轴环330也可以或替代性地被称为闩锁构件、搁板等。
图21描绘了轴承323的实施方案。在展示的实施方案中,轴承323形成为环状成形的垫圈325。可以设想任何其他合适的布置。例如,诸如侧向突出的杆或肋的其他结构可以被固定到驱动轴320或以其他方式从驱动轴320延伸。在驱动轴320相对于手柄304旋转期间,轴承323可以基本上维持驱动轴320的旋转轴线与驱动器101的纵向轴线对准。例如,垫圈的外表面可以与壳体300的内表面相互作用,以在整个钻孔事件中使驱动轴320相对于所述壳体居中。
在其他或进一步情况下,轴承可以防止壳体300与驱动轴320之间的相对纵向平移。例如,如先前所讨论的,在某些情况下,使用者可以握住手柄304(例如,仅手柄304)并且以足够的力向前(即,在远侧方向上)压靠骨,使得来自所述骨的反作用力在驱动轴320上向近侧推压,这进而导致驱动轴320在分隔件340上向近侧推压,以使壳体300相对于手柄304向近侧移动。在移除使用者施加的力时,压缩弹簧334可以推动驱动轴320相对于手柄304向远侧移动。垫圈325或从驱动轴320突出的其他结构可以依次向远侧压在壳体300的分隔件400上,以使壳体300相对于手柄304向远侧移动。
图22和图23分别描绘了联接块318、联接块316。每个块318、块316可以分别限定联接通道430、联接通道432,扭转弹簧314的相应的远端和相应的近端可以穿过联接通道430、联接通道432,以将扭转弹簧314分别联接到驱动轴320和近侧盖件302。在图7中也描绘了这种联接布置。联接块318、联接块316可以限定任何合适的轮廓,所述轮廓可以与由腔412、腔372限定的轮廓互补,并且可以被构造为防止联接块318、联接块316分别与驱动轴320及近侧盖件302之间的旋转。在展示的实施方案中,联接块318、联接块316限定基本正方形的周界。
进一步参照图7,在某些实施方案中,驱动器101或其各种部件可以有利地用很少的或不用粘合剂(adhesive bonds)固定在一起。例如,在一些实施方案中,近侧盖件302和手柄304中的每个被固定到壳体300,而没有使用任何粘合剂来将这些部件直接粘合在一起。壳体部件308a、壳体部件308b可以没有任何可粘结合剂。扭转弹簧314可以在其近端经由联接块316连接到近侧盖件302,并且可以在其远端经由联接块318连接到驱动轴320。扭转弹簧314可以在这样的组装期间被拉伸或以其他方式移位,以便在其近端和远端中的每个上提供向内定向偏置。相应地,扭转弹簧314可以在联接块316上并且因此在近侧盖件302上向远侧拉。类似地,扭转弹簧314可以在联接块318上,并且因此在驱动轴320、轴环330、压缩弹簧334,以及手柄304上向近侧拉。即,在驱动轴320上的近侧定向的力在压缩弹簧334的远端上向近侧拉,这导致压缩弹簧334的近端在近端方向上推动手柄304。因此,扭转弹簧314在近侧盖件302和远侧盖件304上的每个上提供了偏置,所述偏置趋于将近侧盖件302和远侧盖件304保持紧紧地固定至壳体300的末端。当扭转弹簧314被预加载期望量的势能时,或者换言之,当扭转弹簧314被预卷绕或预移位以提供期望量的扭力时,由此提供的向内定向偏置可以是足够强的以将驱动器101维持在完全组装的状态。
现在将继续参照图7讨论驱动器101的操作。在钻孔事件之前,驱动器101可以被卷绕起来,以将能量储存在扭转弹簧314中。将讨论卷绕的两种示意性形式。
在一些情况下,手柄304和壳体300中的一个或多个可以在近侧盖件302被旋转的同时被固持(例如,由最终使用者或在制造过程中)。在展示的实施方案中,近侧盖件302(如从上方观察的)沿顺时针方向旋转以加载扭转弹簧314。以这种方式,盖件302的旋转推动近侧盖件302的斜坡或凸轮表面366抵靠壳体300的斜坡或凸轮表面352。如从图10可以理解的,随着近侧盖件302的凸轮表面366在壳体300的凸轮表面352上向上滑动,凸轮表面352、凸轮表面366的这种相对运动推动近侧盖件302向上(即,相对于壳体300推向近侧)。
最终,近侧盖件302的凸轮表面366的底部(即,远侧)端部到达壳体300的凸轮表面352的顶部(即,近侧)端部。近侧盖件302的附加顺时针旋转暂时使凸轮表面366、凸轮表面352彼此不接触。在盖件302上的由延伸的或扩展的扭转弹簧314提供的远侧定向偏置将近侧盖件302向下拉,直到近侧盖件302的凸轮表面366再次与壳体300的凸轮表面352接触。换言之,近侧盖件302的凸轮表面366沿着壳体300的凸轮表面352交替地上升,直到它们(具体地,在经历半圈之后)到达其顶部为止,并且然后被扭转弹簧314拉下以与壳体300的凸轮表面352再次接触。观看近侧盖件302的仅一个凸轮表面366所遵循的路径,凸轮表面366沿着壳体300的两个凸轮表面352中的第一个上升,并且然后与壳体300的所述两个凸轮表面352中的第二个接触。
在卷绕期间中的任何时候,近侧盖件302可以被释放或以其他方式被允许相对于壳体300旋转。当这种情况发生时,由于由扭转弹簧314提供的向内偏置(这向远侧推动近侧盖件302),近侧盖件302的凸轮表面366与壳体300的凸轮面352接触或保持接触。该偏置的大小随着扭转弹簧314的卷绕而增加。凸轮表面366、凸轮表面352的相互作用导致盖件302相对于壳体300逆时针旋转,直到近侧盖件302的抵接部368与壳体300的抵接部353接触。抵接部368、抵接部353之间的干涉防止近侧盖件302相对于壳体300的任何(或任何进一步)旋转。近侧盖件302和壳体300可以说成作为棘轮系统操作。
以此方式,扭转弹簧314可以以二分之一圈的增量被卷绕或被加载。这样的布置可以容易地允许使用者例如用一只手握住壳体300并且用另一只手将近侧盖件302顺时针旋转半圈或略微超过半圈。然后,使用者可以在维持对壳体300的抓握的同时释放近侧盖件302。这可以允许近侧盖件302逆时针旋转,直到抵接部368、抵接部353接合并且防止扭转弹簧314进一步解卷绕。在这段时间中,使用者可以重新调整他或她在近侧盖件302上的抓握力,然后再次顺时针旋转近侧盖件302另一个半圈。
在一些实施方案中,近侧盖件302每经历一整圈,扭转弹簧314的长度在纵向上增加与线的直径相等的量。结果,在近端手柄304的每个半圈之后,近侧盖件302可以相对于壳体300被定位得越来越高。换言之,在近侧盖件302的一个或多个半圈之后,在近侧盖件302的凸轮表面366与壳体300的凸轮表面352之间可能开始形成间隙。在这种情况下,可以通过该间隙的大小来确定在扭转弹簧314中储存了多少能量,该间隙的大小对应于弹簧314的由于弹簧314被卷绕的匝数而导致的纵向增长量。
在一些实施方案中,标记物或其他指示器(诸如壳体300上和/或近侧盖件302上的任何合适的标记)可以被用于示出足够量的能量已经被储存在扭转弹簧314中。在其他情况下,壳体300上和/或近侧盖件302上的止挡件可以防止近侧盖件302相对于壳体300向近侧移位的量大于将扭转弹簧314加载预定势能量所需的量。
在其他实施方式中,凸轮表面352的高度H
可以设想用于显示驱动器101已经加载了期望量的能量的任何合适的机构。例如,如先前所讨论的,凸轮表面366与凸轮表面352之间的间隙的大小可以指示驱动器101中的能量的量。可以标记储存适当量的能量的预定间隙以指示已经储存了充足的能量。在一些实施方案中,所述间隙的高度可以在扭转弹簧314的线的直径的大约5倍到15倍的范围内。例如,可以在近侧盖件302的大约10个到大约30个半圈之后储存适当量的能量。
在其他情况下,在近侧盖件302仅转单个圈或部分圈之后,可以在驱动器101中储存适当量的能量。盖件302上的标记和壳体300或任何其他合适的标记系统上的标记的对准可以指示所述系统处于卷绕状态、供能状态或加载状态。可以设想任何其他合适的匝数或部分匝数,以及指示已经发生的转动量的任何其他机构,以指示已经储存的能量的量。
在其他情况下,可以使用驱动轴320卷绕扭转弹簧314。例如,可以在驱动轴320旋转的同时(例如,由最终使用者或在制造期间)固持壳体300。在展示的实施方案中,可以将六角键或其他合适的钎头插入插座329中并且沿逆时针方向旋转(如从上方[近侧至远侧视野]观察的;如从下方[远侧至近侧视野]观察的顺时针)以加载扭转弹簧314。盖件驱动轴320以这种方式的旋转推动驱动轴320的斜坡或凸轮表面403抵靠止挡件324的斜坡或凸轮表面393。如从图17和图18可以理解的,随着凸轮表面403、凸轮表面393滑过彼此而壳体300并且因此分隔件340仍被固持,凸轮表面403、凸轮表面393的这种相对运动推动手柄304向下(即,相对于壳体300推向远侧)。
使一组凸轮表面403、凸轮表面393彼此经过的每个局部转动都渐进增加了扭转弹簧314储存的势能。当卷绕完成时,凸轮表面403、凸轮表面393可以在由扭转弹簧314提供的向内偏置的作用下沿相反的方向(例如,顺时针方向)彼此滑过,直到止动表面402、止动表面392彼此接触。止动表面402、止动表面392防止扭转弹簧314进一步解卷绕。可以说成是离合器322和止挡件324作为棘轮系统彼此相互作用。
在以这种方式卷绕扭转弹簧314期间,近侧盖件302的抵接部368、抵接部353与壳体300之间的干涉阻止了近侧盖件302相对于壳体300的旋转,因此维持扭转弹簧314的近端旋转地固定。然而,如前所述,随着扭转弹簧314被卷绕,扭转弹簧314的长度会增加。这可以导致盖件302相对于壳体300上升或向近侧移动。因此,当驱动轴320在驱动器101的远端旋转以卷绕扭转弹簧314时,在随着近侧盖件302上升,彼此纵向滑动经过的同时,抵接部368、抵接部353可以将近侧盖件302相对于壳体300维持固定的旋转关系。
从业者可以在使用驱动器101将进入组件109钻入患者的骨之前(例如,紧接在其之前或在其之前很久)进行扭转弹簧314的卷绕。例如,在一些实施方案中,驱动器101可以以未装载状态或未加载状态被提供,或者可以是可重复使用的,并且从业者可以在钻孔事件之前卷绕或重卷绕弹簧314。从业者可以例如选择预卷绕扭转弹簧314,以便确保在紧急情况下驱动器101是准备就绪的。从业者可以选择在驱动器101被储存在袋或其他工具(gear)中时保持在预加载状态。
在其他情况下,可以在制造步骤期间进行卷绕。例如,在某些情况下,驱动器101可以用于单次使用,或者可以是不可重卷绕的或不可重加载的。在这种驱动器101的一些实施方案的制造期间,近侧盖件302可以相对于壳体300旋转以以诸如先前所讨论的方式卷绕或加载扭转弹簧314。然后,可以以任何合适的方式将近侧盖件302相对于壳体300固定,以防止进一步的相对旋转。例如,在一些实施方案中,在扭转弹簧314已经被卷绕之后,可以使用锁定销来防止近侧盖件302和壳体300的相对运动。在其他实施方案中,在弹簧314已经被加载了所期望的量之后,可以使用胶带、粘合剂或任何其他合适的固定机构将近侧盖件302固定到壳体300。
在其他或进一步实施方案中,在卷绕扭转弹簧314之前,近侧盖件302可以牢固地固定到壳体。例如,扭转弹簧314可以经由驱动轴320而不是经由近侧盖件302以如先前所讨论的方式被卷绕。在某些这样的实施方案中,可以在驱动器101内提供用于弹簧314在加载期间纵向扩展的足够的空间。在一些实施方案中,可以省略壳体和近侧盖件302的凸轮特征和邻接特征。
在任何合适的阶段,诸如在卷绕驱动器101之前(例如,在经由近侧盖件302卷绕驱动器之前)、在卷绕驱动器101之后(例如,在经由近侧盖件302或者经由驱动轴320卷绕驱动器之后),或者在从包装中移除预加载的驱动器101后,进入组件109可以以先前所描述的方式被联接至驱动器101的驱动轴320。即,可以将闭孔器组件102的联接轴122插入驱动轴320的插座328中。进入组件109可以处于联接状态,诸如在图24中描绘的。例如,进入组件109可以最初以联接状态提供给最终使用者。在其他情况下,使用者可以在使用之前联接进入组件109的各个部件。
可以设想任何合适的进入组件109。例如,某些实施方案可以与在2018年1月26日提交的题为“INTRAOSSEOUS ACCESS DEVICES,SYSTEMS,AND METHODS”的美国专利申请公开号2018/0125465中公开的进入组件一起使用,所述美国专利申请对应于题为“SAFETYSHEILDS FOR ELONGATED INSTRUMENTS AND RELATED SYSTEMS AND METHODS”、对应于2018年3月7日提交的美国专利申请号15/914,964,所述美国专利申请中的每个的全部内容通过引用结合于本文。
展示的进入组件109与美国专利申请号15/914,964号(‘964申请)中公开的进入组件的实施方案非常相似。例如,进入组件109可包括安全护罩105,所述安全护罩可以在将闭孔器组件102从针组件202抽出时自动夹在闭孔器104的远端。具体地,在将针组件202已经钻入患者的骨之后,当针组件202在患者的骨内被保留在位时,可以将闭孔器组件102从针组件202中抽出。护罩105自动附接至闭孔器104的远侧尖端保护所述远侧尖端免于与之的无意地接触(例如,防止无意的粘连)。
如在‘964申请中更全面地讨论的,安全护罩105可以包括(例如,由金属或任何其他合适的弹性材料形成的)主体160,所述主体具有向内偏置的在其近端具有横向延伸部172、横向延伸部173的弹性臂162、弹性臂163。横向延伸部172、173限定键孔状开口175,每个键孔状开口175具有第一区域和第二区域,所述第一区域的直径相对较大以能够在闭孔器104的近侧较大直径部分的外表面上滑动,所述第二区域的直径相对较小以在闭孔器104已经相对于护罩105向近侧抽回了足够的量时搁置在凹部150内并且抓握闭孔器104的变窄的部分。
弹性臂162、弹性臂163包括将护罩105与针毂203联接的向外突出部178、向外突出部179。臂162、臂163通过键孔状开口175来维持它们的向外偏斜。突出部178、突出部179与针毂203的环形凹槽227的相互作用使当闭孔器104向近侧缩回时,护罩105维持与针毂203的固定的纵向关系。一旦凹部150进入键孔状开口175,臂162、臂163就向内弹起,以抓握闭孔器104的变窄的颈部,这导致突出部178、突出部179离开环形凹槽227并且从针毂203中释放护罩105。因此,护罩105更牢固地联接(例如,附接到)闭孔器104并且与针毂203解联接。
在展示的实施方案中,安全护罩105除了主体160之外还包括两个部件。在主体160的内部布置有引导件160,所述引导件可以帮助维持安全护罩105的纵向轴线与闭孔器104的纵向轴线的期望的纵向对准。换言之,在闭孔器104相对于安全护罩105平移期间,引导件160阻止安全护罩105绕垂直于安全护罩105的纵向轴线的轴线旋转。进一步,展示的安全护罩105包括向向外偏斜的弹性臂162、弹性臂163提供附加向内偏置的偏置构件185(诸如弹性O形环)。
前述过程中的任何过程都可以是使用驱动器101的一种或多种方法的一部分,或者更通常地,可以是使用系统100的一种或多种方法的一部分。使用系统100的示意性方法的进一步阶段在图25A至图25D中被描绘。
参照图25A,进入组件109可以以诸如先前描述的方式联接至驱动轴320。使用者可以抓握手柄304并且朝着患者P的皮肤S向远侧推动系统100。在图25A中,示出了与皮肤S初始接触的系统100。换言之,针204的远侧尖端246在皮肤S的表面上。针204的远侧尖端246可以被最初定位在患者P的在期望被进入其中的骨的上方位置处的皮肤S表面处。使用者可以抓握手柄304并且施加向远侧的力以推动针204穿过皮肤S。例如,使用者可以抓握手柄304并且在搁板388上向远侧推压。
在一些实施方案中,皮肤S对针204的穿过其中的通道提供相对较小的阻力。即,针204可以有效地贯穿皮肤S。相应地,进入组件109和驱动器101的远侧运动可以是相对不受阻的或仅受可忽略不计的阻挠。换言之,驱动轴320的远侧运动可以是基本不受阻的或者可以是被略微抑制的。在某些情况下,尽管驱动轴320与壳体304之间的相对运动不足以使离合器322与止挡件324脱离,但是相对较小的抵抗可能会稍微压缩压缩弹簧334。相应地,在针204穿过皮肤S朝向骨B穿过的过程中,驱动轴320和壳体304的旋转定向可以保持固定。
参照图25B,在系统100进一步向远侧推进时,针204的远侧尖端246可以最终与骨B的外表面接触,者可以阻挡或抵抗针204的进入。骨B的(或者具体地,骨B的皮质层C的)近侧定向反作用力可以随手柄304上的远侧定向的力的增加而增加。手柄304上的远侧力和在针204上产生的近侧定向的力(所述近侧定向的力通过进入系统109被转移至驱动器101的驱动轴320)可以以足以使离合器322与止挡件324脱离的量继续增加,直到这些力足以压缩压缩弹簧334。
具体地,当压缩弹簧334被压缩时,手柄304相对于驱动轴320向远侧运动。当手柄304向远侧运动时,与其固定联接的止挡件324也向远侧运动并且远离与驱动轴320固定地联接的离合器322。贯穿该运动,离合器322可以与止挡件324充分接合,以防止驱动轴320相对于手柄304旋转。可以说成是驱动轴320处于旋转受限状态(rotationally restrictedstate)。一旦实现足够的分离,如下面进一步讨论的,驱动轴320从旋转受限状态转换为钻孔状态,在钻孔状态下,驱动轴320在扭转弹簧314(图7)的影响下相对于手柄304旋转。换言之,当处于钻孔状态时,允许驱动轴320(诸如沿由扭转弹簧314提供的旋转偏置的方向)自由旋转。
参照图6和图7,当手柄304相对于驱动轴320向远侧运动时,手柄304同样相对于壳体300向远侧运动。这是因为经由进入组件109施加到驱动轴320的抵抗力以类似的方式从驱动轴320、特别地从驱动轴320的离合器322施加到壳体300的分隔件340。具体地,离合器322的近侧表面将抵抗力施加到分隔件340的远侧面。
当手柄304相对于壳体300向远侧移动时,手柄304的狭槽386相对于壳体300的凸片354向远侧移动。换言之,凸片354和狭槽386相对于彼此平移。可能不允许手柄304相对于壳体300向远侧移动足以将凸片354完全移出插槽386的量。例如,压缩弹簧334可以仅允许手柄304相对于驱动轴320纵向移位预定距离,并且该距离可以基本上小于凸片354的高度H
贯穿驱动轴320从旋转受限状态转换为钻孔状态,近侧盖件302同样可以相对于壳体300旋转地固定。具体地,如先前所讨论的,由扭转弹簧314提供的向内偏置可以向盖件302提供足够的远侧偏置以将其保持就位,并且壳体300和近侧盖件302的配合抵接表面可防止这些部件的相对旋转。
参照图25C,当更大的向远侧力施加到手柄304上时,骨B的皮质层C的外表面可以继续抵抗驱动轴320向远侧运动。由于作用在进入组件109和联接到进入组件109上的驱动轴320上的该抵抗力,手柄304和止挡件324可以继续相对于驱动轴320和相关联的离合器322向远侧移动。当止挡件324已经向远侧移动了足够的量时,离合器322从止挡件324脱离,这允许驱动轴320在扭转弹簧314(图7)的影响下旋转(spin)。
在刚刚描述的布置中,扭转弹簧314可以被自动致动。例如,不是使用者选择性地致动致动器以启动驱动轴320的旋转,而是在将足够的力施加到驱动器101上时(例如,在将足够的远侧定向的力施加到手柄304时),驱动轴320就被自动致动,其中响应于所施加的力的抵抗力或反作用力近侧定向穿过或沿着驱动轴320。换言之,驱动器101被构造为在向其施加最小力或阈值钻孔力时自动致动。阈值钻孔力也可以被称为驱动器101的致动力、线性致动力或自动致动力。
在一些实施方案中,压缩弹簧334被预加载以使得它向轴环330并且因此向驱动轴320施加远侧定向“初始”力。同样,预加载的压缩弹簧334向手柄304施加近侧定向“初始”力。例如,当驱动器101处于自然状态或未展开状态时,压缩弹簧334可以被预压缩,诸如图7中所描绘的。当用大于“初始”力的量将驱动轴320并且因此轴环330向近侧压在压缩弹簧334上时,取决于参考系(例如,在手柄304向远侧运动受阻的情况下,或者在手柄304保持稳定的情况下),驱动轴320可以开始相对于手柄304向近侧移动。从不同的参考系(诸如其中可以被说成是驱动轴320保持稳定,或者其中驱动轴320的向近侧运动受阻),用大于“初始”力的量将手柄304必须向远侧压在压缩弹簧334上以使手柄304相对于驱动轴320向远侧移动。
随着施加略大于“初始”力的力,驱动轴320将向近侧移动(或手柄304和止挡件324相对于轴320向远侧移动)一定的量,所述一定的量足以使离合器322与止挡件324脱离接合,这自动允许扭转弹簧314的释放以及驱动轴320的相关联的旋转。因此,“初始”力加上将弹簧334压缩足以使离合器322与离合器接收器324脱离接合的量所需的附加力表示系统的最小力、阈值力或致动力。
在其他实施方案中,压缩弹簧334没有被预加载。例如,当驱动器101处于未致动状态时,压缩弹簧334可以是未被压缩的,或者处于自然状态、未偏转状态或未移位状态。因此,系统的最小力、阈值力或致动力可以对应于施加到压缩弹簧334上的力的量,所述力用于将弹簧334压缩足以使离合器322与离合器接收器324脱离接合的量。换言之,压缩弹簧334可以提供必须克服的偏置以将驱动轴320从转向上受限状态转换为钻孔状态。系统的阈值力对应于克服该偏差所需的力。
可以将最小力或阈值力选择为足够高,以允许驱动器101推动针204穿过患者的皮肤并且与骨接触而无需致动(例如,无需脱离接合离合器322)。进一步,可以选择最小力或阈值力,以要求向骨施加一定量的力,所述一定量的力足以经由针204实现高效切割骨。在各种实施方案中,阈值力为约20牛顿、25牛顿、30牛顿、35牛顿、40牛顿或45牛顿,为不小于约20牛顿、25牛顿、30牛顿、35牛顿、40牛顿或45牛顿,或者为不大于约20牛顿、25牛顿、30牛顿、35牛顿、40牛顿或45牛顿。在进一步实施方案中,阈值力在由前述开放范围组成的合适的封闭范围内。例如,在一些实施方案中,阈值力不小于约20牛顿、25牛顿、30牛顿、35牛顿或40牛顿并且不大于约45牛顿、不小于约20牛顿、25牛顿、30牛顿或35牛顿并且不大于约40牛顿等。
在这样的力下,针上的扭矩在实现高效切割的范围内。在各种实施方案中,扭转弹簧314可以预加载有不小于约100牛顿毫米、150牛顿毫米、200牛顿毫米、250牛顿毫米、300牛顿毫米、350牛顿毫米或400牛顿毫米的扭矩。
在某些实施方案中,如果钻孔力下降到阈值力以下,则钻孔自动停止。在展示的实施方案中,当远侧定向钻孔力下降到阈值力以下时,离合器322重新接合离合器接收器322并且停止驱动轴320的旋转。例如,这可以防止针204的快速旋转,所述快速旋转可能会使骨和周围组织过热,从而使患者感到不适。
在一些实施方案中,在钻孔事件期间,压缩弹簧334可以抑制向钻101施加过大的力。当压缩弹簧334具有相对较低的弹簧常数时,可以增强此效果,因为由于以下关系,这可以促进在弹簧334上维持基本恒定的力:
F=-kx,
其中F是弹簧334施加的力,k是弹簧172的弹簧常数,并且x是弹簧334距离平衡的位移(例如,在与弹簧处于初始状态时它们的相对位置相比时,轴环330和手柄304的位移要么彼此更接近要么彼此间距更大)。例如,对于在钻孔事件期间可能期望施加或者能够接受施加的给定力范围,相对较高的弹簧常数将仅允许轴环330和手柄304相对于彼此的较窄范围的位移;相比较较小的弹簧常数将允许更大范围的位移。在某些情况下,这可以有利地使系统对手柄304相对于驱动轴320的运动不太敏感。在各种实施方案中,可以期望弹簧在承受到不大于约30牛顿、35牛顿、40牛顿、45牛顿或50牛顿的力时具有最大位移。对于给定的实施方案,这样的力可以被认为是最大推荐力。在一些情况下,超过所述最大推荐力可能例如导致驱动器101失速和/或遭受其他操作困难。
在一些情况下,可能期望使用者缓慢增加施加到手柄304的远侧力的量,直到达到阈值力或致动力并且驱动器101自动致动。此后,对于使用者来说,在进行钻孔的短时间内继续施加大约相同量或稍大量的力可能是进一步有利的。施加缓慢斜升和/或基本一致的力可以减少使用者无意超过最大推荐力的可能性。如先前所讨论的,在一些实施方案中,压缩弹簧334可以一定范围的力内有益地调节驱动器101的操作,所述范围的一个末端由致动力界限并且另一个末端由最大推荐力界限。可以设想以上讨论的致动力和最大推荐力的任何合适的组合。
只要对骨施加足够的力、并且因此只要骨提供足够的反作用力、并且还只要扭转弹簧314具有足够的能量来旋转针204以切入骨,驱动器101就可以继续进行钻孔。如前所述,如果没有足够的力施加到骨,则离合器320可以与离合器接收器322重新接合。然后,使用者可以选择用力按压骨以继续进行自动钻孔,或者选择释放手柄304并且代替抓握壳体300和/或近侧盖件302以手动方式继续钻孔,如下面所讨论的。当针204由于来自扭转弹簧314的能量的不足而停止旋转时,使用者可以在压缩弹簧334的影响下允许手柄304相对于壳体300向近侧回弹或向近侧弹回。使用者可以固持壳体300和/或近侧盖件302以以手动方式继续钻孔,如下面所讨论的。
如果如此期望的话,使用者还可以选择在整个钻孔事件中以手动方式使用驱动器101。例如,使用者可以使用驱动器101而无需对扭转弹簧314进行装载和/或释放。换言之,在整个手动钻孔事件中,驱动器320可以相对于手柄304保持旋转地固定。
为了以手动模式使用驱动器101,使用者可以在旋转驱动器101的同时直接抓握壳体300并且向远侧推压。驱动器101可以沿任一方向旋转。在每个方向上,凸片354与狭槽386相互作用,以确保手柄304不会相对于壳体300旋转。此外,壳体300,或更具体地壳体300的分隔件340在离合器320上被充分推压,以维持离合器320与离合器接收器324之间的接合。相应地,当使用者向壳体300施加远侧定向的力时,驱动轴320、手柄304和壳体300在任一旋转方向上保持旋转地锁定。
以类似的方式,当使用者向近侧盖件302施加远侧定向的力时,驱动轴320、手柄304、壳体300和近侧盖件302被旋转地锁定。当使用者在近侧盖件302上向下推压并且逆时针旋转驱动器101时,抵接部353、抵接部368接合。
当使用者在近侧盖件302上向下推压并且顺时针旋转驱动器101时,凸轮表面352、凸轮表面366彼此接合。在展示的实施方案中,由壳体300的凸轮表面352(以及近侧盖件302的互补凸轮表面366)限定的角度α相对陡峭(参见图10)。相应地,仅仅由于顺时针扭转而由近侧盖件302的凸轮表面366施加在壳体300的凸轮表面352上的力产生显着的向下(远侧)定向的分量。结合施加到近侧盖件302的向下定向力,这可以确保近侧盖件302相对于壳体300保持旋转地锁定。例如,当角度α为45度或更大时,扭转力的向下分量当与直接向下力结合时将总是克服所述扭转力的倾向于使近侧盖件302相对于壳体300旋转的任何分量。
图25D描绘了方法阶段,在所述方法阶段,针204已经钻过皮质层C并且进入骨B的骨髓M中,并且针204的旋转已停止。当针204的远侧尖端246和远端穿过坚硬的皮质层C时,由于骨髓M的较软结构,与钻孔相对的骨B所提供的抵抗力或反作用力减小了。在一些情况下,抵抗力的这种变化可以向使用者提供触觉反馈,提醒所述使用者已经实现了所期望的钻孔量。因此,使用者可以自愿减小或消除施加在手柄304上的远侧定向的力的量。当较小的力沿相反方向被施加在手柄304和驱动轴320上时,压缩弹簧334可以解压缩或以其他方式朝向其起始位置返回,因此使离合器322和止挡件334重新接合以使锁定驱动轴320相对于壳体304旋转地锁定。在其他或进一步情况下,由骨B提供的相反力、抵抗力或反作用力在从皮质层C转换为骨髓M时的减小对其自身来说可能足以使离合器322和止挡件334重新接合并自动停止驱动轴320的旋转。
在一些实施方案中,驱动器101可以以相对高的转速操作。这些速度可能远远超过单通过手动操作可达到的速度。在一些情况下,将进入系统109引入骨B的速率可能对整体舒适度影响很小,但是对以较高的速度操作以确保扭转弹簧314的快速释放可能是有利的。这样的快速释放可以减少诸如通过钻穿骨B的背面(例如,皮质层C的后端)而无意中钻得太远的可能性。针204行进通过皮质层C、一路穿过骨髓M、并且然后到达抵靠在骨B背面的皮质层C需要一定的时间。在一些情况下,驱动器101可以在几分之一秒内释放扭转弹簧314的所有储存的能量,以使得针204没有足够的时间到达骨B的背面,同时储存的能量保留在弹簧314中。
在进入组件109已经被引入到骨B中后,诸如在图25D中所示出的,驱动器101可以从进入组件109中移除。然后可以以诸如先前描述的方式将闭孔器组件102从针组件202中移除。然后,可以将任何合适的医疗装置(注射筒、扩展套件等)与连接器联接,以进行后续的输注和/或抽吸。
可以设想前述实施方案的任何合适的变化。例如,如上面所讨论的,展示的驱动器101被构造为以半圈增量卷绕,这是通过两个相同的壳体部件308a、壳体部件308b和近侧盖件302的与所述两个相同的壳体部件相互作用的两个臂362、臂364实现的。其他布置也是可能的。例如,在其他实施方案中,使用了三个相同的壳体部件(例如,每个可以形成壳体的圆周的三分之一),并且近侧盖件302包括三个相同的臂以与所述三个相同的壳体部件相互作用。这可以导致驱动器101可以以三分之一圈的增量卷绕。可以设想其他或进一步布置,诸如利用其他数量或布置的壳体部件和近侧盖件302的相应臂的布置。
作为另一个实施例,可以设想用于防止手柄304与壳体300之间的旋转运动的任何合适的构造。例如,在一些实施方案中,手柄304限定凸片,并且壳体300限定容纳所述凸片的狭槽。换言之,展示的实施方案的凸片和狭槽布置可以颠倒。
作为又一个实施例,近侧盖件302和/或手柄304可以被加长并且加厚区域350(参见图10)可以被缩短。例如,在一些情况下,使用者可以在使用驱动器101的不同阶段期间抓握近侧盖件302或手柄304中的一个或多个,而加厚区域350的任何抓握都是偶然的或辅助的。例如,在卷绕驱动器101期间,使用者可以用一只手握住近侧盖件302,而用另一只手(至少主要地)抓握手柄304。在自动钻入骨期间,使用者可以(至少主要地)抓握远侧盖件302。在手动钻入骨期间,使用者可以(至少主要地)抓握近侧手柄304。
图26描绘了在许多方面类似驱动器101的驱动器501的另一个实施方案。相应地,通常,尽管未必排他地,类似的特征由类似的参考数字指定,同时前导数位从“3”增加到“5”或从“4”增加到“6”。因此,下文中可能不再重复关于相似特征(例如,由相似附图标记标识的特征)阐述的相关公开文本。此外,护罩501的具体特征可能未在附图中通过附图标记示出或标识,或者未在随后的书面描述中具体讨论。然而,此类特征可以与其他实施方案中描绘的和/或关于此类实施方案描述的特征明显相同或基本上相同。因此,此类特征的相关描述同样适用于护罩501的特征。可以对驱动器501采用关于驱动器101描述的特征与这些特征的变型的任何合适组合,并且反之亦然。进一步,可以适当地使用驱动器501代替系统100中的驱动器101。换言之,进入组件109可以以诸如先前描述的方式、方法和过程与驱动器501的实施方案一起使用。公开文本的这种模式同样适用于后续附图中描绘的并且在下文中描述的进一步实施方案,其中,前导数位可以进一步递增。
在展示的实施方案中,驱动器501包括覆套壳体500的近端的近侧盖件502。如在图27中示出的,近侧盖件502包括限定裙部590的较厚的侧壁567,所述裙部包围壳体500的远端。近侧盖件502可以包括类似上面关于近侧盖件302所讨论的斜坡366的内部斜坡566。
继续参照图26,在一些实施方案中,驱动器501包括可以防止驱动器501的无意释放或致动的可移除保持器640。保持器640可以绕压缩弹簧534的至少一部分联接到驱动器501。保持器640可以在轴环530与手柄504之间维持间隔。换言之,保持器640可以防止驱动轴520与手柄504之间的相对纵向运动,否则所述纵向运动可能会使离合器(诸如上面描述的离合器322)脱离并且以诸如先前所讨论的方式致动驱动器501。
在某些示意性可重复使用的实施方案中,在使用者已经卷绕驱动器501以确保驱动器501准备在稍后的时间使用之后,保持器640可以联接至驱动器501。在某些示意性的单次使用实施方案中,保持器640可以在包装和/或运送之前的某个时刻固定到驱动器501,以确保诸如在运输和/或拆包装期间不被过早致动单次使用装置。使用者可以在将驱动器501用于进入事件之前移除保持器640。
在展示的实施方案中,保持器640包括被构造为卡扣在压缩弹簧534的至少一部分上的夹子642。在展示的实施方案中,夹子642包括一对相对的弹性臂644。保持器640可以进一步包括抓握部或杆646,以促进操纵保持器640。
图28描绘了在许多方面类似驱动器101、驱动器501的驱动器701的另一个实施方案。像这些其他驱动器一样,驱动器701包括壳体700、近侧盖件或卷绕盖件702和远侧盖件或手柄704。壳体700还可以或替代性地被称为主体、轴、杆、中间结构、毂、基座、平移基座/旋转基座、芯等。
与驱动器101、驱动器501相比,驱动器701的近侧盖件702和远侧盖件704相对较长。同样地,壳体700的向外部裸露的部分相对较短。实际上,仅仅壳体700的限定凸轮表面和抵接表面以及旋转地锁定的凸片的部分(诸如先前所描述的那些)在驱动器701的外部表面处裸露。在一些情况下,这种布置可能是有利的,因为使用驱动器701的示意性方法可以通过仅仅或主要地抓握手柄704和/或绕线盖件702来进行。换言之,在一些情况下,可以在不需要固持壳体700的裸露表面的情况下进行使用驱动器701的所有阶段。
在展示的实施方案中,壳体700由两个壳体部件708a、708b以诸如先前所讨论的方式形成。在其他实施方案中,壳体700可以由单个一体部件形成。
图29描绘了在许多方面类似驱动器101、驱动器501、驱动器701的驱动器901的另一个实施方案。然而,驱动器901不包括先前讨论的种类的壳体或卷绕盖件。而是,驱动器901包括可以相对于先前公开的某些实施方案伸长的手柄904,以及延伸穿过手柄904的远端并且联接至近侧盖件或罩903的驱动轴920,近侧盖件或罩903定位在驱动轴920的近端。在展示的实施方案中,旋转偏置构件912(例如,扭转弹簧914)(参见图37和图44)与手柄904和驱动轴920联接,如下面进一步讨论的,在图29中仅旋转偏置构件912的远端是可见的。展示的驱动器901进一步包括非常类似先前描述的相似的特征的轴环930、纵向偏置构件932(例如,压缩弹簧934)和保持器1040。
继续参照图29,手柄904可以包括牢固地固定到细长的轴、管、壳体或主体907上的远侧盖件905。因此,在展示的实施方案中,手柄904为两部分构造。可以设想任何其他合适的布置。例如,在其他实施方案中,手柄904可以是限定远侧盖件905和主体907的各种特征的单个部件、整体部件、一体部件。在展示的实施方案中,扭转弹簧914的远端被捕获在远侧盖件905与主体907之间,并且进而被牢固地固定到手柄904。可以设想用于将扭转弹簧914牢固地固定到手柄904的任何其他合适的机构。
参照图30,在展示的实施方案中,主体907形成为基本上圆柱形的管1050。管1050限定在其中容纳驱动器901的各种部件的内腔或腔1052。管1050的远端限定一对狭槽1054和多个凸片1056。在驱动器901的制造期间,两个狭槽1054可以可选地用于将扭转弹簧914的远端容纳在其中。
在一些实施方案中,可以在管1050上提供任何适当种类的标记1058。在展示的实施方案中,一对径向相对的箭头(仅一个是可见的)指向远侧方向。箭头可以向使用者指示要抓握并向远侧推动主体907以致动驱动器901。
参照图31和图32,远侧盖件905可以在许多方面类似远侧盖件304,其中在远侧盖件905中结合有止挡件324的特征。类似于先前描述的特征,远端盖件304可以限定驱动轴开口980和止挡件924。止挡件924可以包括多个向近侧延伸的齿994,每个齿包括止动表面992和斜坡993。这些特征可以以诸如先前描述的方式起作用。
远侧盖件905可以进一步包括突出部或搁板988。在一些情况下,使用者可以选择向搁板988施加远侧力以帮助致动驱动器901。在展示的实施方案中,搁板988限定基本上正方形的周界或轮廓。因此,当驱动器侧放时,搁板988可以防止驱动器901无意滚动。可以设想搁板988的任何其他合适的轮廓或其他构造。
远侧盖件905可以包括从搁板988向近侧延伸的护罩、裙部或套筒1060。套筒1060的大小被设计成紧配合在管1050上。在一些实施方案中,套筒1060限定凹口或凹部1062以容置扭转弹簧914的远端。在其他实施方案中,可以省略凹部1062。例如,在一些实施方案中,远侧盖件905可以以任何合适的方式牢固地固定到扭转弹簧914的远端,并且套筒1060可以覆盖扭转弹簧914的所述远端。
如在图31中示出的,远侧盖件905可以包括一对径向相对的凹部1064(仅一个是可见的),在所述凹部中可以容纳管1050的凸片1056。在一些实施方案中,凹部1064和凸片1056的配合可以增强远侧盖件905和管1050的旋转锁定。
如在图32中示出的,在展示的实施方案中,远侧盖件905包括基本上平坦的远侧面1066。与其他实施方案一样,压缩弹簧934可以压靠在远侧面1066上。
参照图33至图36,驱动轴920可以在许多方面类似上面讨论的驱动轴320。例如,驱动轴920可以包括诸如上面讨论的联接接口328的远侧突出部或联接接口928。联接接口928可以包括限定圆柱形外表面的纵向延伸轴。联接接口928包括内部插座929。如先前所描述的,在插座的基部处是凹部1072,所述凹部可以在其中容纳磁性构件以用于增强与进入组件的联接。
进一步,驱动轴920可以包括从联接接口928的上端横向延伸的一体形成离合器922。离合器922可以包括多个向远侧延伸的齿1000。在展示的实施方案中,每个齿1000包括止动表面1002和斜坡1003。这些特征可以以诸如先前描述的方式起作用。例如,在展示的实施方案中,每个止动表面1002相对于驱动轴920的旋转轴线AR基本垂直。换言之,由每个止动表面1002限定的平面可以沿着旋转轴线AR相交或者可以平行于旋转轴线AR延伸。
驱动轴920可以包括基本上大于驱动轴320的类似特征的细长主体1074。如在图44中示出的,在图示的实施方案中,主体1074可以与手柄904的主体907部分几乎一样长。可以设想其他相对长度。此外,在展示的实施方案中,驱动轴920比手柄904长。可以设想其他相对长度。
继续参照图33至图36,主体1074可以包括华夫图案,所述华夫图案可以帮助制造过程(例如,当驱动轴920形成为模制部件时),并且可以包括多个纵向肋和侧向肋。主体1074可具有相对较大的质量,和/或相对较大的旋转惯性。在一些情况下,增加驱动轴920的旋转惯性可以在使用期间帮助稳定驱动器901。
扭转弹簧914可以以任何合适的方式被牢固地固定到驱动轴920。参照图35和图36,展示的驱动轴920可以包括用于容纳并且连接至扭转弹簧914的近端的联接构造。具体地,驱动轴920包括弹簧通道1079,扭转弹簧914的侧向延伸的近端可以被容纳在所述弹簧通道中。驱动轴920进一步限定近侧腔室1075和一对径向相对的狭槽1076,近侧盖件或罩903的一部分可以被容纳在所述狭槽中。因此,扭转弹簧914的近端可以被卡在罩903与驱动轴920之间。两个半圆柱形突出部1078可以与狭槽1076接界。
参照图37,扭转弹簧914可以包括限定圆柱形区域的多个线圈,所述圆柱形区域通常可以限定腔1084。弹簧914的近端可以包括装配在驱动轴920的弹簧通道1079内部的向内延伸的横向末端1080,如前所述。弹簧914的远端可以包括向外延伸的横向末端1082,所述横向末端可以被捕获在远侧盖件905与主体907之间以与手柄904牢固地固定,如前所述。
参照图38和图39,罩903可以包括诸如当驱动器以手动(而不是自动或供电)模式被使用时,可以容易地被使用者的手按压的近侧表面1090。表面1090可以侧向地展开(例如,通过散布力以减小压力)以增加舒适度。
罩903可以进一步包括轴承923。罩903也可以或替代性地被称为轴承。轴承923可以包括轴承的用于承抵手柄904的主体907和/或在手柄904的主体907内旋转的外表面。在展示的实施方案中,轴承923包括多个纵向延伸的肋1094中的每个的外表面。肋1094可以减小轴承923的与手柄904的内表面接触的总表面积,由此减小摩擦。
罩903可以进一步包括为基本上实心的圆柱形表面的上边缘或带1092。在一些实施方案中,当驱动轴920处于旋转受限的操作状态时(例如,当驱动器901未致动时),带1092可以接合(例如,轻微接触)手柄904的本体907的内表面,如图45中示出的。在一些实施方案中,带1092可以闭合腔1052的上端。
参照图39,罩903可以包括被构造为位于驱动轴920的狭槽1076内并且维持在罩903之间的固定的角关系的旋转锁定件或插入件1096。成角的楔形件或突出部1097可以从插入件1096向远侧延伸,以将扭转弹簧914的近端1080楔入弹簧通道1079内,或者以其他方式将近端1080固持就位,如在图44和图45中示出的。罩903可以进一步限定用于在驱动轴920的近端处容纳突出部1078的一对腔1098。
罩903可以以任何合适的方式附接到驱动轴920。在一些实施方案中,附接可以通过摩擦接合。在其他或进一步实施方案中,可以使用诸如粘合剂结合、溶剂结合和/或超声焊接的附接机构。
在展示的实施方案中,罩903和驱动轴920是连结在一起的单独的部件。在其他实施方案中,罩903和驱动轴920可以一起一体形成。例如,在一些实施方案中,驱动轴920可以包括限定罩903的一些或全部特征的近端。
参照图40至图43,偏置构件932、保持器1040和轴环930可以类似先前讨论的部件。在展示的实施方案中,偏置构件932包括平坦的近端和平坦的远端(参见图46)。保持器1040可以包括夹子1042、弹性臂1044和手柄或抓握部1046,诸如关于早前实施方案所讨论的。参照图42和图43,轴环930可以是被构造为抓握在驱动轴920的侧壁中的成角度的垫圈。如在图48中示出的,将远侧定向的力施加在轴环930上可以致使轴环930更紧地抓握轴920。可以设想任何其他合适的布置。
参照图44,当驱动器901处于组装状态时,驱动轴920纵向地延伸穿过由扭转弹簧914限定的整个腔1084。在一些情况下,将驱动轴920定位在弹簧914内可以有利地实现相对紧凑的设计。
在展示的实施方案中,驱动轴920的近端位于中间平面MP的近侧,中间平面MP横向延伸穿过驱动器901的纵向轴线或旋转轴线。相反,上面讨论的驱动轴320的近端位于横向延伸穿过驱动器101的纵向轴线或旋转轴线的中间平面的远侧。
图44描绘了处于使用早期阶段的驱动器901。如同本文讨论的其他实施方案一样,驱动器901可以以预卷绕或预加载状态设置。在其他或进一步实施方案中,最终使用者可以诸如通过以诸如先前所讨论的方式使用六角键来卷绕驱动器901。在这种最终使用者卷绕的情况下,使用者可以用一只手固持在手柄904上并且(从上方观察)沿顺时针方向旋转已联接至驱动轴920的插座的六角键。离合器922和止挡件924可以充当棘轮,以递增地保持扭转弹簧914的增加的角度偏转量。在这种卷绕期间,离合器922和止挡件924的相互作用的斜坡相对于手柄904逐渐升高驱动轴920和罩903(例如,使它们相对于手柄904向近侧移动),直到达到所述斜坡的末端并且止动表面对准或彼此成角度地移动经过。该运动可以压缩压缩弹簧934,因此增加由此提供的偏置。当止动表面对准或彼此成角度移动经过时,压缩弹簧934可以作用在驱动轴920和罩903上,以使这些部件相对于手柄904下降(例如,相对于手柄904向远侧移动)。因此,在储能事件期间,驱动轴920和罩903可以相对于手柄904顺序地弹起或者升起和降下。在一些实施方案中,在卷绕扭转弹簧1084之前移除保持器1040,以允许驱动轴1020和手柄1040的相对运动。
在某些实施方案中,最终使用者可以从包装中移除驱动器901。使用者随后可以移除保持器1040以允许驱动轴1020和手柄1040的相对运动。在一些实施方案中,提供处于预加载状态的驱动器901。在其他实施方案(例如,某些可重复使用的实施方案)中,最终使用者卷绕驱动器901。
在任何合适的时间,可以将诸如进入组件109的进入组件联接至驱动轴920的插座929。使用者可以抓握手柄904并且将系统推入骨中,并且然后以诸如先前公开的方式输注和/或吸取。
图45和图46描绘了在这种示意性过程期间中的时间点,在所述时间点中,驱动器901尚未被致动以便允许扭转弹簧914解卷绕。该阶段与图25B中描述的阶段相似,其中首先使针204与骨的外部表面接触。
在这种状态下,止挡件924的止动表面992和离合器922的止动表面1002分别彼此邻接,以便抵抗由装载的扭转弹簧914提供的旋转偏置。在展示的实施方案中,止动表面992、止动表面1002是基本竖直的,并且因此与驱动轴920的旋转轴线对准或平行。在这种情况下,止动表面992、止动表面1002可以在彼此纵向滑动经过,而不会导致驱动轴920和手柄904相对于彼此旋转。换言之,可以将远侧定向的力施加到手柄904,该力可以被骨抵抗以在驱动轴920上产生近侧定向的力。当手柄904在远侧力的作用下向远侧运动并且驱动轴920保持就位时,止动表面992可以相对于止动表面1002平移或向下滑动。止动表面992、止动表面1002继续抵抗扭转弹簧914的旋转偏置,而没有引起任何相对旋转,直到止动表面992、止动表面1002彼此解联接。
因此,驱动轴920被维持在旋转受限的状态。刚刚描述的非旋转是旋转受限状态的特殊情况,其中没有实现旋转。在其他实施方案中,当驱动轴920处于旋转受限状态时,可以允许一些旋转。例如,在其他实施方案中,止动表面992、止动表面1002可以相对于旋转轴线AR以一定角度定向,这可以在驱动轴920从旋转受限状态转变为钻孔状态时产生驱动轴920的有限量的旋转。
图47和图48描绘了止动表面992、止动表面1002已被解联接以使得驱动轴920已转变到钻孔状态的阶段。在展示的实施方案中,驱动轴920的近端被从处于旋转受限状态时被手柄904的主体907包围的位置(如图45中所示出的)移动到处于钻孔状态下位于近侧经过手柄904的主体907的近端的位置。在其他实施方案中,驱动轴920的近端可以保持被手柄904包围。
参照图45和图47,在驱动器901的从未致动状态到致动状态的转变中,手柄904和驱动轴920的位移距离D的相对运动可以使罩903的带1092升起以脱离与手柄904的接触。这可以仅留下轴承923的与手柄904以减小摩擦接触的肋1094。如先前所讨论的,轴承923可以诸如通过使驱动轴920居中和/或维持驱动轴920的中心轴线或旋转轴线和所述手柄的纵向轴线的对准而承抵手柄904和/或在手柄904内旋转以稳定驱动轴920。进一步,驱动轴920的远端可以直接承抵远侧盖件905的开口980和/或在远侧盖件905的开口980内旋转以稳定和/或居中。
当从手柄904移除远侧定向的力时,驱动器901可以返回到图45和图46中描绘的定向。无论在驱动驱动器901以以自动模式或供电模式操作之前、之后还是代替致动驱动器901,使用者都可以在完全手动模式下使用驱动器901。使用者可以在罩或盖件903上向远侧按压,以相对于骨向远侧推动进入组件。在盖件903上按压直接将向下的力或向远侧的力传递到驱动轴920。在以这种方式向下按压的同时,使用者还可以附加地(例如,沿单个方向或来回)扭转手柄904。使用者可以在这样的操纵期间抓握盖件903和手柄904,这可以倾向于保持这些部件旋转地锁定。此外,由于在盖件903与手柄904之间不存在超过压缩弹簧934的致动力的任何不同的力,因此离合器922和止挡件924可以保持接合。通过以这种方式向盖件903施加远侧力,医疗驱动器可以在完全手动模式下使用,而与扭转弹簧914是处于加载状态并且因此向系统提供旋转偏置,还是处于未加载状态而不提供任何旋转偏置无关。
图49描绘了用于进入骨内部的套件1100的实施方案,或者换言之,描绘了骨内进入套件1100的实施方案。套件1100可以包括本文公开的任何系统(例如,系统100)和/或所述系统的部件(例如,驱动器101、驱动器501、驱动器701、驱动器901中的任何一个),或者用于所述系统的可替代性部件。例如,在展示的实施方案中,套件1100包括上面分别描述的驱动器901和进入组件109,它们可以以诸如先前描述的方式被一起用于实现骨内进入。
套件1100可以包括可以提供关于本文公开的任何方法或过程的指导的使用说明1110。在各种实施方案中,套件1100、并且尤其是其使用说明1110可以由特定管辖地域的管理机构批准或授权。例如,套件1100及其使用说明1110可以由美利坚合众国食品药品监督管理局批准或授权,和/或可以(诸如在欧盟内通过取得欧盟合格认证(CE)标志)符合其他管辖地域的法规。
套件1100可以进一步包括包含驱动器901、进入组件109以及使用说明1110的任何合适种类的包装1120。在一些实施方案中,使用说明1110物理上包含在包装1120内。在其他或进一步的实施方案中,使用说明1110印刷在包装1120上。
以下是与本公开文本一致的驱动器的实施方案的非限制性实施例。
实施例:
驱动器被构造为与图29至图48中描绘的设计一致。
使用电钻进行测试,以确定使用者施加的力的量与用于穿透皮质进入骨髓中的钻扭矩。基于该数据,使用者施加力与钻扭矩之间的线性平均关系被确定近似为:
TF=扭矩/力
TF=0.0045/米
因此,可以计算弹簧的期望扭矩,以克服使用者施加力最大时的最大扭矩:
Fmax=44.5N
Torquemax=44.5N*0.0045/米
Torquemax=0.2N·米或200N·毫米
另外,钻输出用于确定在给定力穿时透皮质进入骨髓中所需的平均旋转次数。在Fmax时所需的平均旋转次数为8次转动。
在Torquemax中增加了1.8的安全系数,以确保弹簧驱动器钻在使用过程中不会失速。
Torquespring=200N·毫米*1.8=360N·毫米
进一步考虑了设备手柄的外径,以使得其满足可用性。确定的是装置优选地不应超过30.5毫米的外径以实现期望的可用性。在给定公差、手柄厚度等的情况下,弹簧的最大直径限制为25毫米。
适合单元的主体并且提供期望的匝数和扭力的扭转弹簧被确定为:
表1
为了不超过最大的使用者施加力,激活扭转弹簧所需的线性致动力要乘以0.9。被选择为满足这些必要条件的推力(压缩)弹簧被确定为:
表2
先前计算是对(例如,当处于其包装状态作为预卷绕装置时)由扭转弹簧提供的一个优选的起始点/最大扭矩的说明。
尽管前面的详细描述包含用于说明目的的许多细节,但是本领域普通技术人员将理解,可以对以下细节进行许多变化和更改并且认为这些变化和更改包括在本文中。因此,阐述前述实施方案而不失一般性,并且不对所阐述的任何权利要求施加限制。还应理解,本文使用的术语仅用于描述特定实施方案的目的,并且并非旨在是限制性的。除非另外定义,否则本文使用的所有技术术语和科学术语具有与本公开文本所属领域的普通技术人员通常理解的含义相同的含义。
本文公开的任何方法包括用于执行所描述的方法的一个或多个步骤或动作。方法步骤和/或动作可以彼此互换。换言之,除非实施方案的正确操作需要特定的步骤或动作顺序,否则可以修改特定步骤和/或动作的顺序和/或使用。
如在本说明书和所附权利要求中所使用的,除非上下文另有明确规定,否则单数形式“一种”、“一个”和“该”包括复数所指对象。因此,例如,对“层”的引用包括多个这样的层。
在本公开文本中,“包括(comprises)”、“包括(comprising)”、“包含(containing)”和“具有(having)”等可以具有美国专利法中赋予它们的含义并且可以意指“包括(includes)”、“包括(including)”等,并且是通常被解释为开放式术语。术语“由……组成(consisting of)”或“由……组成(consists of)”是封闭式术语,并且仅包括结合此类术语具体列出的部件结构、步骤等以及根据美国专利法的那些。“基本上由……组成(consisting essentially of)”或“基本上由……组成(consists essentially of)”具有美国专利法通常赋予它们的含义。特别地,此类术语通常是封闭式术语,但允许包含不会对与其结合使用的(多个)项目的基本和新颖特性或功能产生实质性影响的附加项目、材料、部件、步骤或元素。例如,如果在“基本上由……组成”语言下存在,则组合物中存在但不影响组合物性质或特性的痕量元素是允许的,即使在这些术语之后的项目列表中没有明确记载。当在说明书中使用如“包括(comprising)”或“包括(including)”等开放式术语时,应理解的是应直接支持“基本上由……组成”语言以及“由……组成”语言,如同明确说明一样,并且反之亦然。
说明书和权利要求中的术语“第一”、“第二”、“第三”、“第四”等等(如果有的话)用于区分相似的元件,而不一定用于描述特定的顺序或时间顺序。应当理解的是,如此使用的术语在适当的情况下是可互换的,以使得本文所述的实施方案例如能够以不同于本文所展示的或以其他方式描述的顺序操作。类似地,如果本文将方法描述为包括一系列步骤,则本文给出的这些步骤的顺序不一定是可以执行这些步骤的唯一顺序,并且可能可以省略某些所述步骤和/或可能可以向所述方法添加本文未描述的某些其他步骤。
说明书和权利要求中的术语“左”、“右”、“前”、“后”、“顶部”、“底部”、“上方”、“下方”等(如果有的话)是用于描述目的而不一定用于描述永久的相对位置。应当理解的是,如此使用的术语在适当的情况下是可互换的,使得本文描述的实施方案例如能够以不同于本文所展示或以其他方式描述的定向的其他定向进行操作。
本文使用的术语“联接(coupled)”被定义为以任何合适的方式直接或间接连接。例如,该术语足够广泛以包括两个特征的联接,凭借所述两个特征由单个部件、一体部件或整体部件限定、形成或以其他方式存在于单个部件、一体部件或整体部件上。本文描述为彼此“相邻”的对象可以彼此物理接触、彼此紧靠,或者在彼此相同的一般区域或区中,这适用于使用所述短语的上下文。在本文中出现短语“在一个实施方案中”或“在一个方面中”并不一定都指代同一个实施方案或同一个方面。
如本文所使用的,术语“基本上”是指动作、特性、性质、状态、结构、项目或结果的完全或近乎完全的程度或度。例如,“基本上”封闭的对象意味着所述对象被完全封闭或近乎完全封闭。在某些情况下,与绝对完整性的确切允许偏差程度可能取决于具体背景。然而,一般而言,完成的接近程度将具有相同的总体结果,就好像获得绝对且全部的完成一样。当在负面含义中使用时,“基本上”的使用同样适用于指代完全或近乎完全缺乏一定动作、特性、属性、状态、结构、项目或结果。例如,“基本上不含”颗粒的化合物要么完全不含颗粒,要么几乎完全不含颗粒以致于效果与完全不含颗粒相同。换句话说,只要没有可测量的效果,“基本上不含”成分或元素的组合物实际上仍可以包含此项。
如本文所使用的,术语“约”用于通过假设给定值可能“略高于”或“略低于”端点来为数值范围端点提供灵活性。此外,对于近似的引用(在整个说明书中作出),诸如通过使用术语“约”或“大致”或其他术语,应理解的是,在一些实施方案中,可以在没有近似的情况下指定值、特征,或特性。例如,在使用诸如“约”、“基本上”和“通常”等限定词的情况下,这些术语在其范围内包括在没有限定符的合格词语。例如,在关于特征叙述术语“基本上垂直”的情况下,应理解,在进一步实施方案中,特征可以具有精确垂直的定向。
如本文所使用的,为方便起见,可以在共同列表中呈现多个项目、结构元素、组成元素和/或材料。但是,这些列表应该被解释为列表中的每个成员都被单独标识为独立且唯一的成员。因此,在没有相反指示的情况下,不应仅基于此列表中的任何个体成员出现在共同组中就将所述个体成员解释为事实上等同于同一列表中的任何其他成员。
浓度、量和其他数值数据可以以范围格式在本文中表达或呈现。应当理解,这样的范围格式仅仅是为了方便和简洁而使用,因此应该被灵活地解释为不仅包括明确列举为范围限制的数值,而且还包括具有在这个范围内的所有各个数值或子范围,就好像明确地列举了每个数值和子范围一样。作为说明,数值范围“约1至约5”应解释为不仅包括约1至约5的明确列举的值,而且还包括指示范围内的各个值和子范围。因此,该数值范围内包括的是诸如2、3和4的各个值以及诸如从1到3、从2到4和从3到5的子范围,以及单独地1、2、3、4和5。
同样的原理适用于仅将一个数值记录为最小值或最大值的范围。此外,无论范围的广度或所描述的特性如何,都应该应用这种解释。
贯穿本说明书对“实施例”的引用(如果有的话)意味着结合所述实施例描述的特定特征、结构或特性包括在至少一个实施方案中。因此,贯穿本说明书在各个地方出现的短语“在实施例中”不一定都指的是同一实施方案。
贯穿本说明书对“实施方案”或“所述实施方案”的引用意味着结合此实施方案描述的特定特征、结构,或特性包括在至少一个实施方案中。因此,贯穿本说明书列举的所引用短语或其变型不一定都指代同一实施方案。
类似地,应当理解的是,在实施方案的以上描述中,出于简化本公开文本的目的,有时将各种特征一起组合在单个实施方案、单个附图或其描述中。然而,本公开文本的方法不应被解释为反映任何权利要求要求比此权利要求中明确列举的那些特征更多的特征的意图。而是,如以下权利要求所反映的,发明性方面在于少于任何单个前述公开的实施方案的所有特征的组合。
在本书面公开文本之后的权利要求在此明确地并入本书面公开文本中,其中每个权利要求自身作为单独的实施方案。本公开文本包括独立权利要求及其从属权利要求的所有排列。此外,能够从随后的独立权利要求和从属权利要求中推导出的附加实施方案也明确地并入本书面描述中。通过将给定从属权利要求的从属关系替换为短语“直至并且包括权利要求[x]的前述权利要求中的任一项”来确定这些其他实施方案,其中括号中的术语“[x]”被最近引列举的独立权利要求的编号代替。例如,对于从独立权利要求1开始的第一权利要求组,权利要求3可以从属于权利要求1和权利要求2中任意一项,其中这些单独从属关系产生两个不同的实施方案;权利要求4可以从属于权利要求1、权利要求2,或权利要求3中任意一项,其中这些单独从属关系产生三个不同的实施方案;权利要求5可以从属于权利要求1、权利要求2、权利要求3,或权利要求4中任意一项,其中这些单独从属关系产生四个不同的实施方案,以此类推。
权利要求中关于特征或元素的术语“第一”的叙述不一定意味着存在第二或附加的这样的特征或元素。在装置加功能格式中具体列举的元件(如果有的话)旨在根据35U.S.C.§112(f)来解释。未以必要的装置加功能格式呈现的元素不旨在按照35U.S.C.§112(f)来解释。要求保护专有财产或特权的本发明的实施方案定义如下。
- PCB短波长脉冲激光钻孔方法及相关钻孔装置
- 用于在大地地层中钻孔的钻孔系统和混合型钻头及其相关方法