电动车辆推进系统
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及一种用于电动车辆的推进系统。这种车辆具有纯电动推进器,而没有推进内燃机。
本发明尤其涉及一种用于电动车辆的推进系统,其包括两个不同的电动马达和两个不同的减速器,以便能够为车辆的使用者提供多种不同的操作模式。
背景技术
例如从实用新型证书FR2976142中已知这种推进系统。根据该实用新型证书的推进系统提供四种不同的操作模式,即:(i)单独使用第一电动马达以第一减速器的传动比操作,(ii)单独使用第二电动马达以第二减速器的传动比操作,(iii)使用两个电动马达均以第一减速器的齿轮比操作,以及(iv)使用两个电动马达均以第二减速器的齿轮比操作。根据该实用新型证书FR2976142的系统为每个电动马达提供仅一个扭矩输出,其布置在该电动马达的定子的一侧的驱动轴上。这样的架构要求在由电动马达产生的扭矩的路径中允许从一种操作模式切换到另一种操作模式的选择性联接系统必须位于减速器的下游。
仍然需要进一步改进具有两个电动马达和两个减速器的电动车辆推进系统。
发明内容
本发明旨在满足该需求,并且根据其一方面,使用一种用于电动车辆的推进系统来做到这一点,该推进系统包括:
-第一电动推进马达,其包括定子和能够绕轴线旋转的转子,该转子具有在定子的一侧限定该第一电动马达的第一扭矩输出和该第一电动马达的第二扭矩输出的第一输出轴,该第二扭矩输出布置在定子的另一侧,这两个扭矩输出轴向相对,
-第二电动推进马达,其包括定子和能够绕轴线旋转的转子,该转子包括具有至少一个扭矩输出的第二输出轴,
-至少第一减速器,其能够适当地经由第一选择性或非选择性联接系统接收在第一电动马达的第一输出上提供的扭矩,该第一减速器具有第一减速比,
-至少第二减速器,其能够适当地经由第二选择性或非选择性联接系统接收由第二电动马达提供的扭矩,该第二减速器具有第二减速比,以及
-第三联接系统,其可以是或可以不是选择性的,用于将第一电动马达的第二扭矩输出联接到第二电动马达的扭矩输出。
上述推进系统使得有可能在必要时将任何第一和第二联接系统定位在相应减速器的上游。如果需要安装选择性或非选择性联接系统,则可以提供更广泛的选择。
在本申请的含义内:
-当允许根据接收到的指令对两个部件进行联接或分离时,联接两个部件的联接系统是选择性的,
-联接两个部件且不是选择性的联接系统永久地联接这两个部件,
-通过前述联接系统之一联接的两个部件彼此固定,从而它们一起旋转。在联接系统采用爪形离合器的情况下,该固定可以对应于扭矩锁定,而在联接系统采用离合器的情况下,这种固定可以采用摩擦传动,以及
-关于从电动马达朝向车辆车轮的扭矩传递的方向来定义“上游”和“下游”。
第一减速器可以经由第一选择性或非选择性联接系统连接至第一电动马达的第一输出。第一减速器相对于第一联接系统的这种布置使得可以限制该第一联接系统必须传递的扭矩的值,使得可以减少该第一联接系统的体积和/或重量和/或成本。
在一变型中,第一选择性或非选择性联接系统经由第一减速器连接至第一电动马达的第一输出。
根据第一实施例,第二输出轴在定子的一侧具有第一扭矩输出并且在定子的另一侧具有第二扭矩输出,这两个扭矩输出轴向相对。
根据该第一实施例,第二减速器可以特别地经由第二联接系统连接至第二电动马达的第一扭矩输出,并且该第二电动马达的第二扭矩输出经由第三联接系统联接至第一电动马达的第二扭矩输出。以与参考第一联接系统所提到类似的方式,将第二联接系统定位在第二减速器的上游使得可以限制该第二联接系统必须传递的扭矩的值。
作为变型,并且仍根据该第一实施例,第二联接系统经由第二减速器连接至第二电动马达的第一扭矩输出,并且该第二电动马达的第二扭矩输出经由第三联接系统联接到第一电动马达的第二扭矩输出。
换句话说,根据该第一实施例,电动马达的每个输出轴一直穿过,并且每个电动马达具有两个轴向相对的扭矩输出。
根据该第一实施例,第一电动马达的第二扭矩输出可以是面向第二电动马达的扭矩输出,第二电动马达的第二扭矩输出可以是面向第一电动马达的扭矩输出。
根据第二实施例,第二输出轴可以在定子的仅一侧具有其扭矩输出,并且该扭矩输出可以在适当情况下经由第二联接系统连接到第二减速器,并且该扭矩输出可以通过第三联接系统联接到第一电动马达的第二扭矩输出。
在这种情况下,第二电动马达的扭矩输出可以是连接到第二联接系统和第三联接系统的单个输出,这些系统沿着平行的扭矩路径引导。在这种情况下,第一输出轴可以在轴向上与第二输出轴连续。同样在这种情况下,第一联接系统可以与第二联接系统同心。第一联接系统和第二联接系统例如在双离合器(例如干式离合器或湿式离合器)内分组在一起。这些离合器中的每个可以包括多个摩擦片。
贯穿上文,第一减速器可以是单个减速器且第二减速器可以是单个减速器。第一减速传动比与第二减速传动比之间的比可以在1与5之间,尤其是在1.1与3之间。
在具有单个第一减速器的推进系统的情况下,推进系统可以包括用于选择第一减速器的选择构件,从而允许该减速器选择性地联接到推进系统的其余部分。当第一联接系统连接第一减速器和第一电动马达的第一扭矩输出,并且该第一减速器与该第一扭矩输出分离时,这种选择构件使得可以避免从下游侧驱动该第一减速器。这则意味着该第一减速器可以达到完全分离的状态。在适当的情况下,即使不存在第一联接系统,也可以存在这种选择构件。因此可以通过节省第一联接系统来降低推进系统的成本。
在具有单个第二减速器的推进系统的情况下,推进系统可以包括用于选择第二减速器的选择构件,从而允许该减速器选择性地联接到推进系统的其余部分。当第二分离系统连接第二减速器和第二电动马达的第二输出,并且该第二减速器与该第一输出分离时,这种选择构件使得可以避免从扭矩所遵循的路径的角度来看从下游侧驱动该第二减速器。这则意味着该第二减速器可以达到完全分离的状态。在适当的情况下,即使不存在第二联接系统,也可以存在这种选择构件。因此可以通过节省第一联接系统来降低推进系统的成本。
作为变型,可以平行地布置多个第一减速器,尤其是两个第一减速器,其中各个第一减速器的第一减速传动比彼此不同,和/或可以平行地布置有多个第二减速器,特别是两个第二减速器,其中各个第二减速器的第二减速传动比彼此不同。第一减速器的数量可以与第二减速器的数量相同或不同。
当存在平行的多个第一减速器时,可以提供用于选择这些第一减速器之一的构件,以便选择具有最合适的第一减速传动比的第一减速器。
当存在平行的多个第二减速器时,可以提供用于选择这些第二减速器之一的构件,以便选择具有最合适的第二减速传动比的第二减速器。
在具有多个第一减速器和/或具有多个第二减速器的推进系统的情况下,在适当的情况下可以不具有第一联接系统和第二联接系统,上述选择构件则单独执行选择性联接功能。
在多个第一减速器和多个第二减速器的情况下,在所有第一和第二减速器中考虑的最高减速传动比和最低减速传动比之间的比可以在1至5之间,尤其是在1.1至3之间。
当两个第一减速器平行且两个第二减速器平行时,可以获得具有四个不同传动比的推进系统。
每个联接系统例如都采用离合器。离合器的选择使得可以采用渐进式的联接和分离。
当第一联接系统和第二联接系统采用离合器时,特别是根据上述第二实施例,第一和第二联接系统可以在干式双离合器或湿式双离合器内分组在一起。
在一变型中,每个联接系统可以是另一类型,例如采用爪形离合器或另一系统。在又一变型中,联接系统彼此相比可以是不同类型的。
第一联接系统和第二联接系统例如采用离合器,而第三联接系统采用爪形离合器,或者该第三联接系统不是选择性的。
在又一变型中,第一联接系统和第二联接系统采用爪形离合器,而第三联接系统采用例如离合器或爪形离合器或非选择性联接系统。
无论第一和第二联接系统采用离合器还是爪形离合器,第三联接系统都可以选自:
-由以下构成的组件:旋转地固定为与两个电动马达之一的扭矩输出一体旋转并与安装有能够在中间轴上自由旋转的第一空转小齿轮啮合的小齿轮;固定为与两个电动马达中的另一个的扭矩输出一体旋转并与固定为与中间轴一体旋转的第二小齿轮啮合的小齿轮;以及用于选择性或非选择性地联接第一小齿轮和第二小齿轮的联接构件,该联接构件例如是爪形离合器,或者
-由以下构成的组件:空转小齿轮,其安装成能够在两个电动马达之一的扭矩输出上自由旋转,该空转小齿轮与固定为与中间轴一体旋转的第一小齿轮啮合;固定为与两个电动马达中的另一个的扭矩输出一体旋转并与固定为与中间轴一体旋转的第二小齿轮啮合的小齿轮;以及用于选择性地联接空转小齿轮和电动马达的扭矩输出的联接构件,该空转小齿轮安装在该扭矩输出上,该联接构件例如是爪形离合器,或者
-由以下构成的组件:空转链轮齿轮,其安装成能够在两个电动马达之一的扭矩输出上自由旋转,该链轮齿轮与链条啮合;固定为与两个电动马达中的另一个的扭矩输出一体旋转并与链条啮合的链轮齿轮;以及用于将空转链轮齿轮与电动马达的输出选择性地联接的联接构件,该空转链轮齿轮安装在该输出上,该联接构件例如是爪形离合器,或者
-由以下构成的组件:固定为与第一电动马达的第二扭矩输出一体旋转的链轮齿轮;固定为与第二电动马达的扭矩输出一体旋转的链轮齿轮;以及与这些链轮齿轮中的每个啮合的链条。在此不设置选择性联接元件,第三联接系统在该后一变型中不是选择性的。
作为另一变型,第三联接系统可以是永久的刚性连接,第一输出轴例如直接固定在第二输出轴上。
贯穿上文,第一输出轴的旋转轴线可以与第二输出轴的旋转轴线重合。在那种情况下,第一电动马达的第二扭矩输出可以面向第二电动马达,并且第二电动马达的第二扭矩输出可以面向第一电动马达。因此,第一输出轴和第二输出轴可以彼此连续地布置。因此,旋转轴线是对准的。
在一变型中,贯穿上文,第一输出轴的旋转轴线和第二输出轴的旋转轴线可以是不同的,特别是平行但不重合或不对准。
贯穿上文,推进系统可以包括差速器,其布置成接收以下至少一项:通过第一减速器传递的扭矩以及通过第二减速器传递的扭矩。该差速器可以是机械差速器或电子差速器,其控制馈送到车辆的每个从动车轮的驱动扭矩。
在适当的情况下,一个或多个中间齿轮可以布置在第一和第二减速器中的每个的下游以及差速器的上游。这些齿轮对于通过第一减速器传递的扭矩的路径和通过第二减速器传递的扭矩的路径是共同的,它们可以形成或可以不形成附加的减速传动比。在一变型中,在第一减速器和差速器之间或者在第二减速器和差速器之间没有布置附加的齿轮。
贯穿上文,当推进系统包括三个联接系统时,该推进系统还可以包括用于控制第一、第二和第三联接系统的控制构件,从而该系统可以采用以下配置中的全部或一些:
-配置,其中差速器接收通过第一减速器传递的扭矩,该扭矩由第一电动马达产生,
-配置,其中差速器接收通过第二减速器传递的扭矩,该扭矩由第二电动马达产生,
-配置,其中差速器接收通过第一减速器传递的扭矩,该扭矩由第一电动马达产生,并且还接收通过第二减速器传递的扭矩,该扭矩由第二电动马达产生,
-配置,其中差速器接收通过第一减速器传递的扭矩,该扭矩由第一电动马达和第二电动马达产生,或者在适当的情况下仅由第二电动马达产生,
-配置,其中差速器接收通过第二减速器传递的扭矩,该扭矩由第一电动马达和第二电动马达产生,或者在适当的情况下仅由第一电动马达产生,以及
-驻车制动配置,其中三个联接系统处于联接配置。
当存在用于第一减速器的选择构件和/或当存在用于第二减速器的选择构件时,上述控制构件也可以控制该选择构件或这些选择构件。
控制构件例如结合到车辆处理器(ECU)中。在一变型中,控制构件结合到变速器控制单元(TCU)中。作为另一变型,控制构件可以是模块化的,并且用于控制第一和第二联接系统的控制模块结合到变速器控制单元中,而用于控制第三联接系统的控制模块结合到ECU中。
贯穿上文,由第一电动马达提供的额定扭矩与由第二电动马达提供的额定扭矩之间的比率可以在1与10之间,例如在1与4之间。
第一电动马达和第二电动马达例如是相同类型的,例如绕线转子或永磁同步电机。在一变型中,它们可以例如是异步电机。
贯穿上文,当推进系统包括第一联接系统、第二联接系统和第三联接系统时,这些系统可以彼此不同。第三联接系统可以全部或部分地由其专用的元件形成,即既不属于第一联接系统也不属于第二联接系统的一个或多个元件。
附图说明
通过阅读以下非限制性示例性实施例的描述并研究附图,可以更好地理解本发明,其中:
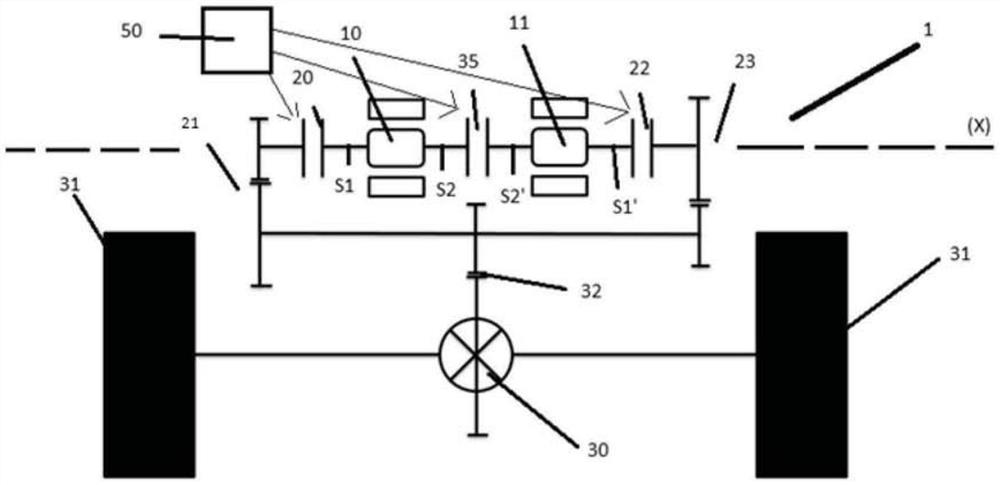
-图1示意性地示出了根据本发明第一实施例的推进系统,
-图2至4示出了图1的推进系统的变型,
-图5示意性地示出了根据本发明第二实施例的推进系统,
-图6至9示意性地示出了未包含在权利要求1中但有利于理解本发明的推进系统,
-图10示出了可用于创建第一或第二联接系统的离合器,以及
-图11示出了可用于创建第一或第二或第三联接系统的爪形离合器。
具体实施方式
图1示出了根据本发明第一实施例的车辆推进系统1。
在这种情况下,该推进系统1是纯电动的,这意味着它不使用任何内燃机来驱动在此情况下为汽车的车辆。该推进系统1在此包括第一电动马达10和第二电动马达11。
第一电动马达10和第二电动马达11例如是永磁同步电机。第一电动马达10例如具有50Nm的额定扭矩,而第二电动马达11例如具有70Nm的额定扭矩。如图1所示,在所描述的示例中,每个电动马达10、11具有转子,该转子具有绕旋转轴线旋转并且在相应电动马达的定子的每一侧轴向延伸的输出轴。在所描述的示例中,第一电动马达和第二电动马达的旋转轴线是重合的,两个电动马达10和11沿着该轴线X对准。
因此,第一电动马达1包括轴向布置在该电动马达的一侧的第一扭矩输出S1和轴向布置在该电动马达的另一侧的第二扭矩输出S2。
第二电动马达2包括轴向布置在该电动马达的一侧的第一扭矩输出S1'和轴向布置在该电动马达的另一侧的第二扭矩输出S2'。
在图1中可以看出,第一电动马达10的第二输出S2面向第二电动马达11,并且第二电动马达11的第二输出S2'面向第一电动马达10。
根据该第一实施例,第一电动马达的第一输出S1连接到第一联接系统20,其在该情况下是选择性联接系统。该联接系统20在图1至5中以离合器的形式示出,但可以以某种其他方式制造,例如使用爪形离合器。
该第一联接系统20允许第一电动马达10的第一输出S1联接到第一减速器21,其例如具有约12的减速比。
根据该第一实施例,第二电动马达的第一输出S1'连接到第二联接系统22,其在该情况下是选择性联接系统。与关于第一联接系统20所提到相类似,该系统在图1至5中以离合器的形式示出,但可以以某种其他方式制造,例如使用爪形离合器。
图10描绘了适于体现第一联接系统20或体现第二联接系统22的离合器的示例。该离合器在这种情况下是板式离合器,这些板26在移动活塞的作用下被联接以传递扭矩。
在一变型中,每个联接系统20、22可以采用爪形离合器,如图11所示。这种联接系统允许使用爪27来联接两个部件。
第二联接系统22允许第二电动马达11的第一输出S1'联接到第二减速器23,其例如具有约8的减速比。
本发明不限于在分别由相应的马达10或11产生的扭矩的路径中分别将第一或第二联接系统20或22分别定位在第一减速器21或第二减速器23的上游。作为变型,可以在分别由相应的马达10或11产生的扭矩的路径中分别将第一或第二联接系统20或22分别定位在第一减速器21或第二减速器23的下游。例如,在图2中可以看到这样的另一推进系统,与联接系统相比,其减速器的定位反向。
推进系统1还包括差速器30。在所考虑的示例中,一个或多个齿轮32介于第一减速器21和差速器30之间以及第二减速器23和差速器30之间。然而,在变型中,可以不设置齿轮。
在图1和2的示例中,推进系统1包括仅一个单个第一减速器21和仅一个单个第二减速器22,但本发明不限于该情形。
因此,如图4所示,可以在第一电动马达的第一扭矩输出S1和差速器30之间平行地布置多个第一减速器21,并且可以在第二电动马达11的第一扭矩输出S1'和差速器30之间平行地布置多个第二减速器23。
从图4中可以看出,两个第一减速器21在此是平行的,并且两个第二减速器23是平行的。就像两个第二减速器23一样,两个第一减速器21在这里具有彼此不同的第一减速比。在适当的情况下,可以设置用于选择第一减速器21之一的选择构件33和用于选择第二减速器23之一的选择构件34。这些选择构件33、34中的每个在这种情况下是爪形离合器。
如图3所示,在推进系统包括单个第一减速器21和单个第二减速器22的情况下,选择构件33和34也可以存在。因此,该选择构件33、34允许相应的减速器21、23被断开。
差速器30布置成接收:
-在所述示例中,在经过第一联接系统20和第一减速器21传递之后,在第一电动马达10的第一输出S1上可用的扭矩,和/或
-在所述示例中,在经过第二联接系统22和第二减速器23传递之后,在第二电动马达11的第一输出S1'上可用的扭矩。
差速器30允许扭矩传递到车轮31。
如图1-4所示,第一电动马达10的第二输出S2联接到第二电动马达11的第二输出S2'。该联接是通过第三联接系统35完成的。
在图1和2中,该第三联接系统35采用离合器,例如类似于图10的离合器。
在图3和4中,该第三联接系统35不是选择性的,例如是皮带或一个输出轴与另一个输出轴的直接连接。
在图5中,该第三联接系统35采用爪形离合器,例如如图11所示。
用于产生选择性或非选择性第三联接系统的其他示例是可能的。
第三联接系统35例如改编自图6所示的系统。该图6示出了推进系统1,其包括与图1至4的推进系统相同的元件,但由于每个电动马达10或11包括仅一个单个扭矩输出而不同地布置。这种改编自图6以适合图1至4的示例的第三联接系统35将是由以下形成的组件:小齿轮40,类似于图6,其将固定为与第一电动马达10的第二扭矩输出S2一体旋转并与固定为与中间轴42一体旋转的第一小齿轮41啮合;固定为与第二电动马达11的第二扭矩输出S2'一体旋转并与安装成在中间轴42上自由旋转的空转第二小齿轮44啮合的小齿轮43;以及形成用于选择性地联接第一小齿轮41和第二小齿轮44的联接构件的爪形离合器45。
第三联接系统35也可以改编自图7所示的系统。该图7示出了推进系统1,其包括与图1的推进系统相同的元件,但由于每个电动马达10或11包括仅一个单个扭矩输出而不同地布置。这种改编自图7的联接系统35将是由以下形成的组件:固定为与第一电动马达10的第二扭矩输出S2一体旋转的小齿轮45、安装成在第二电动马达11的第二扭矩输出S2'上自由旋转的空转小齿轮47、固定为与中间轴49一体旋转并与小齿轮45啮合的第一小齿轮48、固定为与中间轴49一体旋转并与小齿轮47啮合的第二小齿轮50以及允许小齿轮47选择性地联接到其所安装在的第二扭矩输出S2'的爪形离合器16。在一变型中,可以省略小齿轮48、50和中间轴49,空转小齿轮47直接与小齿轮45啮合。从图7中可以注意到,这里的第一联接系统20和第二联接系统22被选择构件33和34代替。
第三联接系统35也可以改编自图8所示的系统。该图8示出了推进系统1,其包括与图1的推进系统相同的元件,但由于每个电动马达10或11包括仅一个单个扭矩输出而不同地布置。这种改编自图8的联接系统35将是由以下形成的组件:固定为与第一电动马达10的第二扭矩输出S2一体旋转的链轮齿轮52、固定为与第二电动马达11的第二扭矩输出S2'一体旋转的空转链轮齿轮54以及与每个链轮齿轮52和54啮合的链条55。设置有爪形离合器56,用于将链轮齿轮54选择性地联接到其安装所在的扭矩输出S2'。
第三联接系统35也可以改编自图9所示的系统。该图9示出了推进系统1,其包括与图1的推进系统相同的元件,但由于每个电动马达10或11包括仅一个单个扭矩输出而不同地布置。这种改编自图9的联接系统35将9是由以下形成的组件:固定为与第一电动马达10的第二扭矩输出S2一体旋转的链轮齿轮52、固定为与第二电动马达11的第二扭矩输出S2'一体旋转的空转链轮齿轮53以及与每个链轮齿轮52和54啮合的链条55。这里没有设置选择性联接装置,第三联接系统35在这种情况下不是选择性的。
在又一变型中,第一联接系统20和第二联接系统22采用爪形离合器,并且第三联接系统35采用离合器。
贯穿上文,推进系统还可包括控制构件50,用于控制第一20、第二22和第三35联接系统。当存在多个第一减速器21和/或多个第二减速器23时,控制构件50还可以通过适当地经由专用于这些第一减速器或这些第二减速器的模块来选择减速器之一,该专用模块操作如上文所述的选择构件33或34。如已经提到,这些选择构件可以具有单个第一减速器和单个第二减速器,在这种情况下,它们可以由控制构件50控制,而不必必须是第一联接系统20和第二联接系统22。
控制构件50被编程为使得图1的推进系统可以采用以下配置:
-配置(i),其中差速器30接收通过第一减速器21传递的扭矩,该扭矩由第一电动马达10产生,
-配置(ii),其中差速器30接收通过第二减速器23传递的扭矩,该扭矩由第二电动马达11产生,
-配置(iii),其中差速器30接收通过第一减速器21传递的扭矩,该扭矩由第一电动马达10产生,并且还接收通过第二减速器23传递的扭矩,该扭矩由第二电动马达11产生,
-配置(iv),其中差速器30接收通过第一减速器21传递的扭矩,该扭矩由第一电动马达10和第二电动马达11产生,或者在适当的情况下,当第一电动马达10关闭时,仅由第二电动马达11产生,
-配置(v),其中差速器接收通过第二减速器23传递的扭矩,该扭矩由第一电动马达10和第二电动马达11产生,或者在适当的情况下,当第二电动马达11关闭时,仅由第一电动马达10产生,以及
-配置(vi),其中每个联接系统20、22和35处于联接位置。
在下表中给出了控制构件50用来控制联接系统以便获得上述配置(i)至(vi)的命令。
配置(i)例如适于具有低扭矩需求的低车速。
配置(ii)例如适于具有低扭矩需求的高车速。
配置(iii)例如适于瞬时速度,例如当从一个减速比过渡到另一个减速比时。
配置(iv)例如适于具有高扭矩需求的低车速。
配置(v)例如适于具有高扭矩需求的高车速。
配置(vi)例如适于作为驻车制动器操作。
现在将参考图5描述根据本发明第二实施例的推进系统。
该第二实施例与参照图1描述的实施例的不同之处在于,第二电动马达11仅包括一个单个扭矩输出S1'。一方面,该扭矩输出S1'通过第二联接系统22选择性地或以其他方式联接至第二减速器23,另一方面,通过第三联接系统35选择性地或以其他方式联接至第一电动马达10。
在图5中可以看出,第一和第二联接系统可以是同心的,此处第一联接系统20围绕第二联接系统22布置。
可以根据上文描述的系统来生产每个联接系统。可以在图5的上下文中使用改编自图6至9并且在上文描述的三个联接系统35之一。其与参考图1所描述的联接系统的不同之处在于,小齿轮43、47或链轮齿轮53或54由第二电动马达11的扭矩输出S1'承载。
本发明不限于上面已经描述的示例。
- 电动车辆推进系统中的故障处理系统和方法
- 用于平衡电动车辆推进系统中的荷电状态的系统和方法