一种用于智能基坑检测的零角度转动伸缩臂
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及基坑检测技术领域,特别是一种用于智能基坑检测的零角度转动伸缩臂。
背景技术
基坑在进入或者施工之前需要对其进行全面的检测,但是现有的基坑检测装置要么只能检测出基坑的宽度以及深度等尺寸,存在着很大的局限性,往往在进入或者施工之前需要用到若干种基坑检测装置,十分费时费力,而且现有的基坑检测装置在检测基坑的尺寸时,往往只能反馈出一些数据,操作者无法对基坑有一个直观的理解。
而且现有基坑检测装置在降落井下模组的过程中,井下模组会随着降落发生不必要的转动,从而给测量带来极大困难,影响了测量的准确性,因此设计一种用于智能基坑检测的零角度转动伸缩臂就显得尤为重要。
发明内容
本发明提供了一种用于智能基坑检测的零角度转动伸缩臂,通过外筒体、内筒体以及空心杆体上特殊的限位凸条和限位槽的设计,使伸缩臂在伸缩的过程中发生0角度转动,保证测量的准确性,起到了增加实用性能的作用。
为解决上述的技术问题,本发明的结构包括一种用于智能基坑检测的零角度转动伸缩臂,其特征在于:包括伸缩臂体,所述的伸缩臂体是由第一接头、上盖体、下盖体、外筒体、空心杆体和内筒体所组成,所述的第一接头固定在上盖体上并且其内部开设有用于连接机器人本体上模块底部的第二接头的内接螺纹,所述的上盖体和下盖体分别固定在外筒体的上下两端,所述的空心杆体活动连接在外筒体内,所述的内筒体活动连接在空心杆体内,所述的内筒体的下端开设有用于连接井下模组顶部的第三接头的螺纹孔,所述的内筒体与外筒体之间设置有2个或2个以上的空心杆体,第二个或第二个以上空心杆体都活动连接在上一个空心杆体内,第一个空心杆体活动连接在外筒体内,内筒体活动连接在最后一个空心杆体内。
进一步:所述的机器人本体上模块的底部还设置有挂钩,所述的挂钩与钢丝绳索相连,所述的钢丝绳索穿过第一接头和第二接头,所述的挂钩伸入外筒体内与内筒体的上端相连,所述的内筒体的上端内开设有用于连接挂钩的钩槽。
又进一步:所述的空心杆体的两端都设置有限位座,所述的空心杆体的上端以及内筒体的上端都设置有滑块,第一个空心杆体通过滑块滑动连接在外筒体内并通过上盖体和下盖体防止其脱离外筒体,第二个或第二个以上的空心杆体也通过滑块滑动连接在上一个空心杆体内并通过限位座防止其脱离上一个空心杆体,所述的内筒体也还通过滑块滑动连接在最后一个空心杆体内并通过限位座防止其脱离最后一个空心杆体。
又进一步:所述的空心杆体和内筒体的外壁上都设置有第一限位凸条,所述的下盖体以及限位座上开设有与第一限位凸条相匹配的第一限位槽,所述的第一限位凸条与空心杆体的轴线方向相同,所述的第一限位凸条沿着第一限位槽进行滑动。
再进一步:所述的下盖体和限位座的内壁上都设置有第二限位凸条,所述的第二限位凸条与空心杆体的轴线方向相同,所述的空心杆体和内筒体的外壁上都设置有与第二限位凸条相匹配的第二限位槽,所述的第二限位凸条滑动连接在第二限位槽内。
采用上述结构后,本发明通过外筒体、内筒体以及空心杆体上特殊的限位凸条和限位槽的设计,使伸缩臂在伸缩的过程中发生0角度转动,保证测量的准确性,起到了增加实用性能的作用;并且本设计还具有结构简单、易于制造和实用高效的优点。
附图说明
下面结合附图和具体实施方式对本发明作进一步详细的说明。
图1为本发明的使用状态图。
图2为机器人本体上模块的结构图。
图3为井下模组的结构图。
图4为本发明的结构图。
图5为本发明的局部内部结构图。
图6为第一实施例的结构图。
图7为图6中A的放大图。
图8为第二实施例的结构图。
图9为图8中B的放大图。
具体实施方式
实施例一
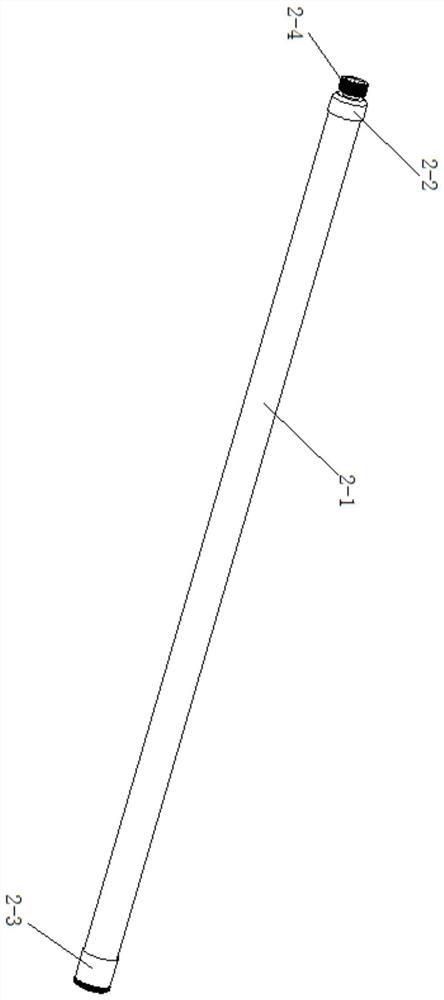
如图1、图2、图3和图4所示的一种用于智能基坑检测的零角度转动伸缩臂,包括伸缩臂体2,所述的伸缩臂体是由第一接头2-4、上盖体2-2、下盖体2-3、外筒体2-1、空心杆体2-6和内筒体2-7所组成,所述的第一接头固定在上盖体2-2上并且其内部开设有用于连接机器人本体上模块3底部的第二接头6的内接螺纹,所述的上盖体和下盖体分别固定在外筒体的上下两端,所述的空心杆体活动连接在外筒体内,所述的内筒体活动连接在空心杆体内,所述的内筒体的下端开设有用于连接井下模组1顶部的第三接头5的螺纹孔,所述的内筒体与外筒体之间设置有2个或2个以上的空心杆体,第二个或第二个空心杆体都活动连接在上一个空心杆体内,第一个空心杆体活动连接在外筒体内,内筒体活动连接在最后一个空心杆体内。
如图5所示的机器人本体上模块的底部还设置有挂钩4,所述的挂钩与钢丝绳索相连,所述的钢丝绳索穿过第一接头和第二接头,所述的挂钩伸入外筒体内与内筒体的上端相连,所述的内筒体的上端内开设有用于连接挂钩的钩槽2-8。
如图6和图7所示的空心杆体的两端都设置有限位座2-12,所述的空心杆体的上端以及内筒体的上端都设置有滑块,第一个空心杆体通过滑块滑动连接在外筒体内并通过上盖体和下盖体防止其脱离外筒体,第二个或第二个以上的空心杆体也通过滑块滑动连接在上一个空心杆体内并通过限位座防止其脱离上一个空心杆体,所述的内筒体也还通过滑块滑动连接在最后一个空心杆体内并通过限位座防止其脱离最后一个空心杆体。
如图6和图7所示的空心杆体和内筒体的外壁上都设置有第一限位凸条2-9,所述的下盖体以及限位座上开设有与第一限位凸条相匹配的第一限位槽,所述的第一限位凸条与空心杆体的轴线方向相同,所述的第一限位凸条沿着第一限位槽进行滑动。
实施例二
实施例二与实施例一大至相同,其区别在于外筒体、空心杆体和内筒体的结构不同,如图8和图9所示的下盖体和限位座的内壁上都设置有第二限位凸条2-11,所述的第二限位凸条与空心杆体的轴线方向相同,所述的空心杆体和内筒体的外壁上都设置有与第二限位凸条相匹配的第二限位槽2-10,所述的第二限位凸条滑动连接在第二限位槽内。
综上所述,本发明通过外筒体、内筒体以及空心杆体上特殊的限位凸条和限位槽的设计,使伸缩臂在伸缩的过程中发生0角度转动,保证测量的准确性,起到了增加实用性能的作用;并且本设计还具有结构简单、易于制造和实用高效的优点。
- 一种用于智能基坑检测的零角度转动伸缩臂
- 一种可自由转动伸缩的智能臂