具有安全系统的自动扶梯
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及一种自动扶梯,该自动扶梯包括至少一个导轨和多个梯级,所述梯级可沿导轨移动。此外,自动扶梯在下部自动扶梯区域和上部自动扶梯区域中分别具有过渡区域。此外,自动扶梯包括安全系统,该安全系统被设计成当梯级中的至少一个从导轨上抬起、特别是在过渡区域中从导轨上抬起时,触发自动扶梯的停止。
本发明还涉及一种用于启动自动扶梯的紧急停止的方法。
背景技术
自动扶梯包括运输区域,以及在自动扶梯的下端和上端处分别包括过渡区域和循环区域。在此,过渡区域表示自动扶梯的一部分,在该部分中,自动扶梯的梯级从运输区域转移到循环区域,或者反之,在运输区域中输送人员,在循环区域内梯级被旋转。特别地,所述过渡区域表示自动扶梯的区域,在该区域内,自动扶梯的梯级从楼梯形状转移至水平面中或者反之。
在该过渡区域中可能出现物体楔入两个自动扶梯梯级之间。在这种情况下,碰撞到楔入的物体上的自动扶梯梯级被抬升。
在自动扶梯连续运行期间,由于自动扶梯梯级的该抬升,后续的自动扶梯梯级也从其位置抬升。在这种状态下,自动扶梯梯级不能在它们的循环轨道中被引导到自动扶梯的上客平台或下客平台的下方,并且撞到该平台上。这导致自动扶梯的显著损坏。
已知的用于自动扶梯的安全系统在自动扶梯的过渡区域处集成在自动扶梯的导轨中。已知的安全系统包括杠杆,该杠杆通过弹簧保持在特定的位置中。如果物体在两个自动扶梯梯级之间楔住,使得自动扶梯梯级在过渡区域中从导轨抬起,则自动扶梯梯级倾斜并且在杠杆上施加力。如果自动扶梯梯级施加在杠杆上的力大于沿相反方向作用在杠杆上的弹簧的复位力,则杠杆被操纵。通过操纵杠杆来触发开关,由此使自动扶梯停住。
由现有技术已知的安全系统具有多个缺点。因此,导轨必须在自动扶梯的过渡区域处打开,以便将安全系统集成到导轨中。此外,在触发之后将安全系统复位到预备位置中是非常费事的。此外,安全系统的维护费用非常高,因为例如弹簧由于安全系统的触发而松懈并且因此弹簧的复位力改变。
发明内容
在此背景下,本发明的目的是改进开头所述的安全系统,以及改进用于启动自动扶梯的紧急停止的方法。在此,安全系统尤其应具有简单的结构。特别地,安全系统应当易于安装以及易于维护。
为了实现该目的,提出了根据独立权利要求所述的自动扶梯以及用于启动紧急停止的方法。本发明的其它有利的设计方案在从属权利要求和说明书中描述以及在附图中示出的实施例中示出。
所提出的解决方案提供了一种自动扶梯,该自动扶梯包括至少一个导轨和多个梯级,这些梯级可沿着导轨移动。此外,自动扶梯包括在下部自动扶梯区域中的过渡区域和在上部自动扶梯区域中的过渡区域。此外,自动扶梯包括安全系统,该安全系统被构造成当梯级中的至少一个从导轨抬起、特别是在过渡区域中从导轨抬起时,触发自动扶梯的停止。特别地,安全系统包括应变测量条。特别地,应变测量条布置在导轨上。特别地,应变测量条在过渡区域内设置在导轨上。
在一个设计方案中,导轨具有上边缘和下边缘。特别地,导轨在过渡区域中具有上边缘和下边缘。尤其地,下边缘的顶侧用作至少一个梯级的梯级辊的作用面。
尤其是,具有上边缘和下边缘的导轨两件式地实施。
特别地,导轨被构造成三件式的,其中,导轨具有上边缘、下边缘和侧边缘。
特别地,导轨具有C形。尤其是导轨在过渡区域中是C形的。尤其是C形导轨包括上边缘、侧边缘和下边缘。尤其是侧边缘将上边缘与下边缘相连。特别地,导轨成形为使得梯级的梯级辊在C形导轨内部沿下边缘被引导。
通过在具有上边缘和下边缘的导轨内部引导梯级辊,可以特别稳定地引导梯级。特别地,以此方式防止了梯级在其从导轨抬起时完全被抬离其位置。因此,梯级的重新调整(Rejustage)被显著简化。
在一个设计方案中,应变测量条设置在导轨的内侧上。特别地,应变测量条布置在导轨的内侧上。特别地,应变测量条布置在导轨的上边缘的底侧上。特别是,应变测量条布置在导轨的下边缘的顶侧上。
除了布置在导轨的内侧上,额外地或替代地,应变测量条还布置在导轨的外侧上。特别地,应变测量条布置在导轨的上边缘的顶侧上。特别地,应变测量条布置在导轨的下边缘的底侧上。
现在,如果其梯级辊在导轨的下边缘上引导的梯级被抬起,那么梯级辊则被压靠到引导辊的上边缘的底侧上。同时,该梯级辊不再向导轨的下边缘上施加力。在将应变测量条布置在导轨的上边缘上的情况下,抬起的梯级的梯级辊将压力施加到应变测量条上。在将应变测量条布置在导轨的下边缘上的情况下,一旦梯级被抬起,作用在应变测量条上的力的大小就减小。
应变测量条借助于固定装置布置在导轨上。特别是将应变测量条与导轨粘接。特别是将应变测量条与导轨拧紧。尤其是,固定装置包括铆钉。特别是将应变测量条与导轨焊接。
在一个设计方案中,应变测量条具有电阻。特别地,当应变测量条变形时,应变测量条的电阻改变。特别地,当作用在应变测量条上的力的大小改变时,应变测量条的电阻改变。特别地,当压力施加在应变测量条上时,应变测量条的电阻改变。特别地,当作用在应变测量条上的力的大小减小时,应变测量条的电阻改变。特别地,电阻的变化与作用在应变测量条上的力成比例。特别地,应变测量条用作电开关。
在一个设计方案中,应变测量条通过电连接件与自动扶梯的开关装置电连接。特别地,开关装置设置用于检测应变测量条的电阻的变化。特别地,开关装置被设计为,当应变测量条的电阻变化至少特定值时,致动自动扶梯的制动器。特别地,开关装置被配置成当高出应变测量条的电阻的特定极限值时致动自动扶梯的制动器。
特别地,当梯级、尤其梯级的梯级辊由于梯级的抬起而向布置在导轨上的应变测量条施加力或者作用于应变测量条的力的大小改变时,自动扶梯停止。
特别是,应变测量条由于由梯级、特别是由梯级辊施加在应变测量条上的力而变形。特别地,当应变测量条变形时,应变测量条的电阻改变。
特别地,当应变测量条的电阻变化至少特定的值时,特别是当电阻高出特定的极限值时,自动扶梯的制动器被致动。特别地,当开关装置致动自动扶梯的制动器时,自动扶梯停止。
如果梯级抬起,梯级的梯级辊则被压靠在导轨的上边缘的底侧上。
通过梯级辊在此施加到导轨的上边缘上的压力,使设置在导轨的上边缘的底侧和/或顶侧上的应变测量条变形。
由于梯级的抬起,作用在导轨下边缘上的力的大小减小,从而设置在导轨下边缘的顶侧和/或底侧上的应变测量条承受更小的负荷。
应变测量条的变形导致应变测量条的电阻的变化。因此,自动扶梯被停止。特别地,当应变测量条的电阻变化至少特定的值时,自动扶梯停止。特别地,当应变测量条的电阻高出特定的极限值时,自动扶梯停止。
通过这种方式实现了,仅当实际上存在危险状况时才执行紧急停止。通过确定相应的极限值尤其避免了执行不必要的紧急停止。例如,不必要的紧急停止可能是自动扶梯由于小石头滑到两个自动扶梯梯级之间而停止。
与现有技术相比,根据本发明的自动扶梯具有的优点是,安全系统易于安装。因此,应变测量条在自动扶梯的过渡区域中能够简单地固定在导轨上,尤其是粘接和/或螺纹连接。因此,不需要打开导轨以将安全系统集成到导轨中。此外,一旦被楔住的物体被取出并且自动扶梯梯级又被带到其在导轨上的位置中,则根据本发明的自动扶梯在实施紧急停止之后立即又准备好投入使用。因此,省去了将安全系统置于预备位置中的费事的复位。通过使用应变测量条也不会产生对安全系统的费事的维护。
附图说明
本发明的其它有利的细节、特征和设计细节结合附图中示出的实施例进行详细阐述。在此示出了:
图1a以简化的示意图示出了根据现有技术的安全系统的一个实施例;
图1b以细节图示出了在图1a中示出的根据现有技术的安全系统;
图2以简化的示意图示出了在自动扶梯的过渡区域中的、在导轨上的应变测量条的布置;和
图3以简化的示意图示出了根据本发明的安全系统的一个实施例。
具体实施方式
图1a和图1b示出了当前的现有技术。在此,在位于自动扶梯10的上端和下端的过渡区域11中,在导轨12中各安装一个安全系统20。图1b示出了自动扶梯10中的在图1a中示出的安全系统20的细节图。
如图1b所示,安全系统20包括杠杆21。如果物体在两个自动扶梯梯级之间楔住并且由此使碰撞到该物体上的自动扶梯梯级抬起,则通过抬起的自动扶梯梯级使安全系统20的杠杆21枢转。
通过杠杆21的枢转操纵开关,该开关将自动扶梯10置于停止状态。
杠杆21通过机械连接借助于弹簧22由于弹簧22的复位力F
如在图1b中可看到的那样,这种根据现有技术的结构是非常复杂的。为了将安全系统集成到导轨中,导轨必须具有凹部。
弹簧也难以接近,从而在实施紧急停止之后将安全系统返回到预备位置中是非常费事的。
此外,图1a和1b所示的安全系统由于借助杠杆的触发机构而具有如下缺点,即,安全系统仅具有非常小的触发区域。只有当刚好在自动扶梯的此种位置处的梯级被抬起时才启动紧急停止,即,安全系统设置在所述位置处。为了能够借助于安全系统在自动扶梯的过渡区域的较大区域中启动紧急停止,在由现有技术已知的系统中需要将多个安全系统集成到导轨中。然而这是非常耗费的。
图2示出了根据本发明的安全系统的应变测量条23在自动扶梯10的下端处的导轨12上的布置。
在图2中示出的实施例中,应变测量条23布置在过渡区域11中,在该过渡区域11中自动扶梯10的梯级从运输区域14转移到循环区域15中,在自动扶梯上至少在过渡区域11中设置C形构造的导轨12。在此,应变测量条23设置在导轨12的上边缘12a的底侧上。
然而,同样地,应变测量条23也可以布置在上边缘12a的顶侧上。
应变测量条23借助于在这里未示出的固定装置固定在导轨12上。尤其地,固定装置是粘合剂。尤其地,固定装置是螺栓连接。尤其是,固定装置包括铆钉。特别是将应变测量条与导轨焊接。
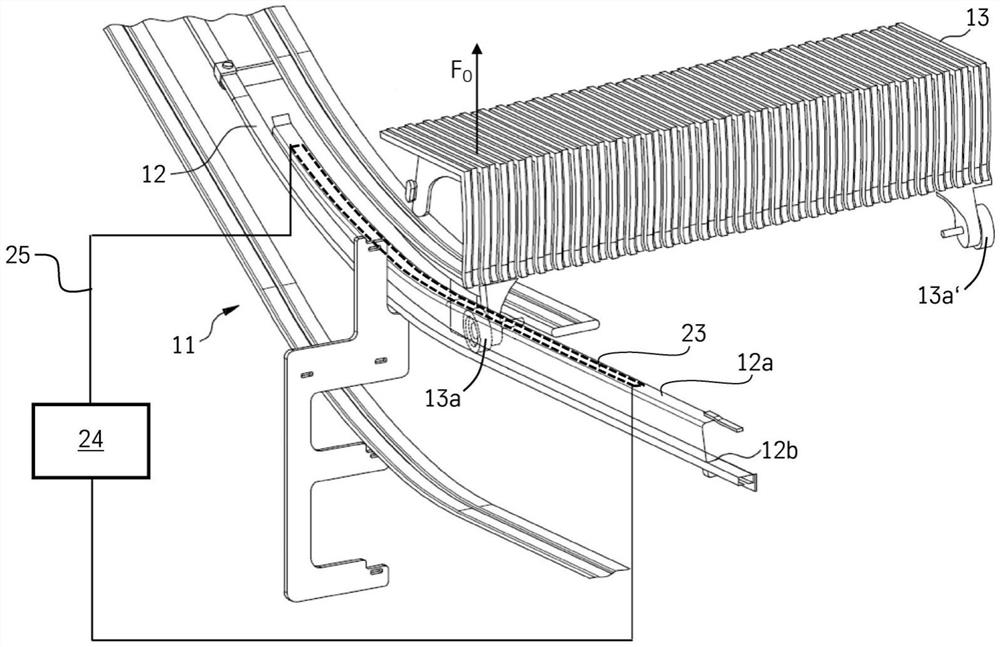
如图3所示,梯级13的梯级辊13a在导轨12的下边缘12b上被引导。应变测量条23布置在导轨12的上边缘12a的底侧,该应变测量条23经由电连接件25电连接至开关装置24。
在图3所示的实施方式中,仅示出了梯级13的引导部的一侧。与所示出的应变测量条23在导轨12上的布置结构等效地,也可以额外地在对置的、引导梯级13的另一侧的梯级辊13a′的导轨上布置另外的应变测量条。在此,所述另外的应变测量条可以通过电连接件同样与开关装置24电连接,或者与另外的开关装置连接。
如果在梯级13在过渡区域11中从运输区域转移到循环区域中时,物体在两个梯级13之间楔住,那么碰撞到物体上的梯级13则被抬起,其中,该梯级13的梯级辊13a从导轨12的下边缘12b上抬起并且被压抵导轨12的上边缘12a。在此,梯级辊13a以力F
如果作用在应变测量条23上的力F
随后,楔在两个梯级之间的物体可以被移除并且梯级可以再次就位。对于安全系统不需要重新调整。在定位梯级之后,安全系统立即再次投入运行。
在另一未示出的实施形式中,应变测量条设置在导轨的下边缘上。
在此,梯级辊持久地将力施加到布置在下边缘上的应变测量条上。
如果至少一个梯级从其位置抬起,则作用在应变测量条上的力减小,由此应变测量条变形,并且因此应变测量条的电阻改变。
如果作用在应变测量条上的力低于极限值,使得应变测量条的电阻变化至少特定的量值,特别是应变测量条的电阻高出特定的极限值,则与上述实施方式中的情况等效地,自动扶梯停止。
附图标记说明
10 自动扶梯
11 过渡区域
12 导轨
12a 上边缘
12b 下边缘
13 梯级
13a 梯级辊
14 运输区域
15 循环区域
20 安全系统
21 杠杆
22 弹簧
23 应变测量条
24 开关装置
25 电连接件
F
F
- 用于自动扶梯或移动步道的安全制动器以及具有此类安全制动器的自动扶梯或移动步道
- 具有安全系统的自动扶梯