一种光学成像系统
文献发布时间:2023-06-19 11:22:42
技术领域
本发明属于光学成像领域,尤其涉及一种包括七片透镜的光学成像系统。
背景技术
随着智能手机的快速发展,对具有良好成像性能的手机镜头的需求与日俱增,尤其是人们对于拍摄清晰人像照片的需求。为了能让使用者拥有更佳的拍照体验,手机镜头需要具有突出主体与虚化背景的特点,这就需要具有大孔径、长焦距的光学成像镜头。
因此,需要一种采用非球面的七片式长焦镜头,拥有良好的成像质量,适用于清晰人像照片的拍摄。
发明内容
本发明旨在提供一种七片透镜组成的光学成像系统,具有大孔径、长焦距,拥有良好的成像质量,适用于清晰人像照片的拍摄。
本发明的一个方面提供一种光学成像系统,该光学成像系统沿着光轴由物侧至像侧依序包括:光阑;具有光焦度的第一透镜;具有负光焦度的第二透镜;具有光焦度的第三透镜;具有负光焦度的第四透镜;具有光焦度的第五透镜;具有正光焦度的第六透镜,其像侧面为凸面;以及具有光焦度的第七透镜。
其中,光学成像系统的有效焦距f与光学成像系统的入瞳直径EPD满足:f/EPD<1.4。
根据本发明的一个实施方式,第一透镜的有效焦距f1、第一透镜物侧面的曲率半径R1以及光学成像系统的有效焦距f满足:1.0<(f1+R1)/f<1.6。
根据本发明的一个实施方式,第二透镜的有效焦距f2与第二透镜物侧面的曲率半径R3满足:-6.5<f2/R3<-2.0。
根据本发明的一个实施方式,光学成像系统的有效焦距f与第二透镜像侧面的曲率半径R4满足:2.5<f/R4≤3.5。
根据本发明的一个实施方式,第三透镜的有效焦距f3与第三透镜物侧面的曲率半径R5满足:1.5<f3/R5<5.0。
根据本发明的一个实施方式,第四透镜的有效焦距f4、第四透镜像侧面的曲率半径R8以及光学成像系统的有效焦距f满足:-3.0<(f4+R8)/f<0。
根据本发明的一个实施方式,第六透镜的有效焦距f6与第六透镜像侧面的曲率半径R12满足:-2.0<f6/R12<0。
根据本发明的一个实施方式,第七透镜的有效焦距f7与第七透镜像侧面的曲率半径R14满足:-9.5<f7/R14<-2.5。
根据本发明的一个实施方式,第一透镜在光轴上的中心厚度CT1与第二透镜在光轴上的中心厚度CT2满足:3.5<CT1/CT2<5.0。
根据本发明的一个实施方式,第三透镜在光轴上的中心厚度CT3与第五透镜在光轴上的中心厚度CT5满足:2.0<CT3/CT5<3.5。
根据本发明的一个实施方式,第四透镜和第五透镜在光轴上的空气间隔T45与第三透镜和第四透镜在光轴上的空气间隔T34满足:17.0mm
根据本发明的一个实施方式,光学成像系统的最大视场角的一半Semi-FOV满足:10.0°<Semi-FOV<30.0°。
根据本发明的一个实施方式,第一透镜物侧面至成像面的轴上距离TTL与成像面上有效像素区域对角线长的一半ImgH满足:2.5<TTL/ImgH<3.0。
本发明的另一个方面提供一种光学成像系统,该光学成像系统沿着光轴由物侧至像侧依序包括:光阑;具有光焦度的第一透镜;具有负光焦度的第二透镜;具有光焦度的第三透镜;具有负光焦度的第四透镜;具有光焦度的第五透镜;具有正光焦度的第六透镜,其像侧面为凸面;以及具有光焦度的第七透镜。
其中,各个透镜之间相互独立,各透镜之间在光轴上具有空气间隔;光学成像系统的有效焦距f与第二透镜像侧面的曲率半径R4满足:2.5<f/R4≤3.5。
本发明的有益效果:
本发明提供的光学成像系统包括多片透镜,如第一透镜至第七透镜。本发明的光学成像系统具有大孔径、长焦距,拥有良好的成像质量,适用于清晰人像照片的拍摄。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明光学成像系统实施例1的透镜组结构示意图;
图2a至图2d分别为本发明光学成像系统实施例1的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
图3为本发明光学成像系统实施例2的透镜组结构示意图;
图4a至图4d分别为本发明光学成像系统实施例2的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
图5为本发明光学成像系统实施例3的透镜组结构示意图;
图6a至图6d分别为本发明光学成像系统实施例3的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
图7为本发明光学成像系统实施例4的透镜组结构示意图;
图8a至图8d分别为本发明光学成像系统实施例4的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
图9为本发明光学摄像镜头实施例5的透镜组结构示意图;
图10a至图10d分别为本发明光学摄像镜头实施例5的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
图11为本发明光学摄像镜头实施例6的透镜组结构示意图;
图12a至图12d分别为本发明光学摄像镜头实施例6的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意,在本说明书中,第一、第二、第三等的表述仅用于将一个特征与另一个特征区分开来,而不表示对特征的任何限制。因此,在不背离本发明的教导的情况下,下文中讨论的第一透镜也可被称作第二透镜或第三透镜。
还应理解的是,用语“包括”、“包括有”、“具有”、“包含”和/或“包含有”,当在本说明书中使用时表示存在所陈述的特征、元件和/或部件,但不排除存在或附加有一个或多个其它特征、元件、部件和/或它们的组合。此外,当诸如“......中的至少一个”的表述出现在所列特征的列表之后时,修饰整个所列特征,而不是修饰列表中的单独元件。此外,当描述本申请的实施方式时,使用“可”表示“本申请的一个或多个实施方式”。并且,用语“示例性的”旨在指代示例或举例说明。
在附图中,为了便于说明,已稍微夸大了透镜的厚度、尺寸和形状。具体来讲,附图中所示的球面或非球面的形状通过示例的方式示出。即,球面或非球面的形状不限于附图中示出的球面或非球面的形状。附图仅为示例而并非严格按比例绘制。
在本发明的描述中,近轴区域是指光轴附近的区域。若透镜表面为凸面且未界定该凸面位置时,则表示该透镜表面至少于近轴区域为凸面。若透镜表面为凹面且未界定该凹面位置时,则表示该透镜表面至少于近轴区域为凹面。每个透镜最靠近被摄物体的表面称为该透镜的物侧面,每个透镜最靠近成像面的表面称为该透镜的像侧面。
除非另外限定,否则本文中使用的所有用语(包括技术用语和科学用语)均具有与本申请所属领域普通技术人员的通常理解相同的含义。还应理解的是,用语(例如在常用词典中定义的用语)应被解释为具有与它们在相关技术的上下文中的含义一致的含义,并且将不被以理想化或过于形式化的解释,除非本文中明确如此限定。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例对本发明的特征、原理和其他方面进行详细描述。
示例性实施方式
本发明示例性实施方式的光学成像系统包括七片镜片,沿光轴由物侧至像侧依序包括:光阑、第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜以及第七透镜,其中,各个透镜之间相互独立,各透镜之间在光轴上具有空气间隔。
在本示例性实施方式中,第一透镜可具有正光焦度或负光焦度;第二透镜具有负光焦度;第三透镜可具有正光焦度或负光焦度;第四透镜具有负光焦度;第五透镜可具有正光焦度或负光焦度;第六透镜具有正光焦度,其像侧面为凸面;第七透镜可具有正光焦度或负光焦度。
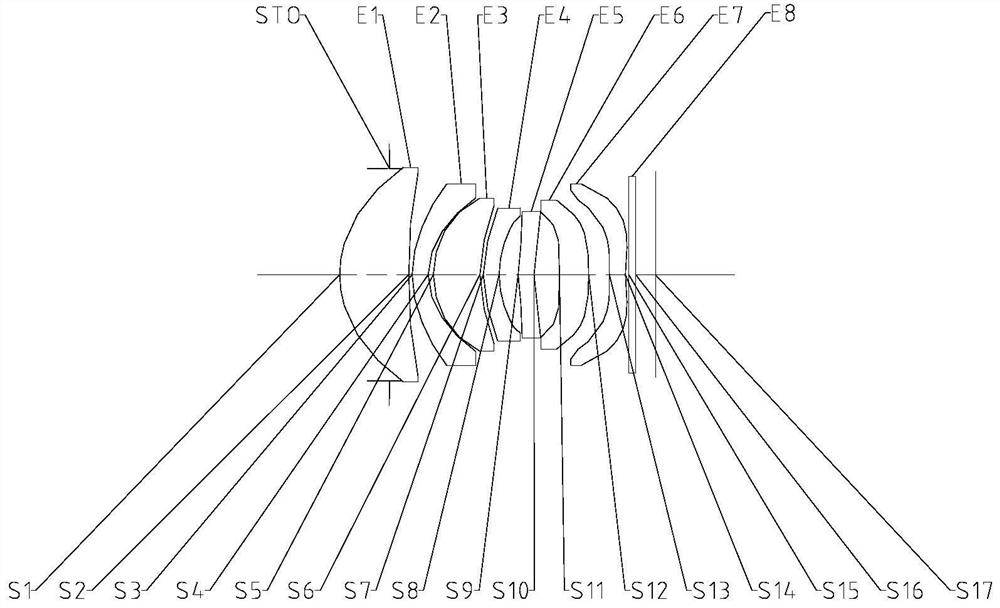
在本示例性实施方式中,光学成像系统的有效焦距f与光学成像系统的入瞳直径EPD满足的条件式为:f/EPD<1.4。通过合理的分配透镜的光焦度,使系统具有较小的像差;通过约束焦距与入瞳直径的比值,可以增加系统的光通量,增强暗环境下的成像效果,同时可以减小边缘视场的像差。更具体的,f与EPD满足:1.2 在本示例性实施方式中,第一透镜的有效焦距f1、第一透镜物侧面的曲率半径R1以及光学成像系统的有效焦距f满足的条件式为:1.0<(f1+R1)/f<1.6。通过约束第一透镜的有效焦距,光学成像系统的有效焦距,第一透镜物侧面的曲率半径,可以提升对光线的汇聚能力,也有利于减小光学成像镜头的像差。更具体的,f1、R1与f满足:1.3<(f1+R1)/f<1.55,例如,1.31≤(f1+R1)/f≤1.53。 在本示例性实施方式中,第二透镜的有效焦距f2与第二透镜物侧面的曲率半径R3满足的条件式为:-6.5<f2/R3<-2.0。通过约束第二透镜的有效焦距和第二透镜物侧面的曲率半径,能够控制光线在第二透镜的偏转角度,有利于降低系统的敏感性。更具体的,f2与R3满足:-6.4 在本示例性实施方式中,光学成像系统的有效焦距f与第二透镜像侧面的曲率半径R4满足的条件式为:2.5<f/R4≤3.5。通过约束光学成像系统的有效焦距与第二透镜像侧面的曲率半径的比值,有利于校正像差,使镜头具有良好的成像质量。更具体的,f与R4满足: 2.7 在本示例性实施方式中,第三透镜的有效焦距f3与第三透镜物侧面的曲率半径R5满足的条件式为:1.5<f3/R5<5.0。通过约束第三透镜的有效焦距和第三透镜物侧面的曲率半径,使光学成像镜头具有较好的平衡色差和畸变的能力。更具体的,f3与R5满足:1.6 在本示例性实施方式中,第四透镜的有效焦距f4、第四透镜像侧面的曲率半径R8以及光学成像系统的有效焦距f满足的条件式为:-3.0<(f4+R8)/f<0。合理控制第四透镜的有效焦距,光学成像系统的有效焦距,第四透镜像侧面的曲率半径,使系统具有较小的球差,使镜头具有良好的成像质量。更具体的,f4、R8与f满足:-2.9<(f4+R8)/f<-0.1,例如,-2.87≤(f4+R8)/f≤-0.18。 在本示例性实施方式中,第六透镜的有效焦距f6与第六透镜像侧面的曲率半径R12满足的条件式为:-2.0<f6/R12<0。通过约束第六透镜的有效焦距和第六透镜像侧面的曲率半径,可以有效的控制光线在第六透镜的偏转角度,实现系统良好的加工特性。更具体的,f6与R12满足:-1.9 在本示例性实施方式中,第七透镜的有效焦距f7与第七透镜像侧面的曲率半径R14满足的条件式为:-9.5<f7/R14<-2.5。通过约束第七透镜的有效焦距和第七透镜像侧面的曲率半径,可以使边缘视场的光线角度在合理范围内,能够有效的降低系统的敏感性。更具体的,f7与R14满足:-5 在本示例性实施方式中,第一透镜在光轴上的中心厚度CT1与第二透镜在光轴上的中心厚度CT2满足的条件式为:3.5<CT1/CT2<5.0。合理控制第一透镜和第二透镜在光轴上的中心厚度的比值,使透镜表面变化自由度更高,以此来提升光学成像镜头校正像散和场曲的能力。更具体的,CT1与CT2满足:3.7 在本示例性实施方式中,第三透镜在光轴上的中心厚度CT3与第五透镜在光轴上的中心厚度CT5满足的条件式为:2.0<CT3/CT5<3.5。合理控制第三透镜和第五透镜在光轴上的中心厚度的比值,有效压缩了系统尺寸,避免光学成像镜头镜片组的体积过大。更具体的,CT3与CT5满足:2.5 在本示例性实施方式中,第四透镜和第五透镜在光轴上的空气间隔T45与第三透镜和第四透镜在光轴上的空气间隔T34满足的条件式为:17.0mm 在本示例性实施方式中,光学成像系统的最大视场角的一半Semi-FOV满足的条件式为:10.0°<Semi-FOV<30.0°。合理控制光学成像镜头的最大半视场角,使光学成像镜头满足长焦特性并具有较好的平衡像差的能力,且能合理控制主光线偏转角度,提高与芯片的匹配程度。更具体的,Semi-FOV满足:20° 在本示例性实施方式中,第一透镜物侧面至成像面的轴上距离TTL与成像面上有效像素区域对角线长的一半ImgH满足的条件式为:2.5<TTL/ImgH<3.0。合理约束系统总长和像高的比值,有利于光学成像镜头的小型化。更具体的,TTL与ImgH满足:2.7 在本示例性实施方式中,上述光学成像系统还可包括光阑。光阑可根据需要设置在适当位置处,例如,光阑可设置在物侧与第一透镜之间。可选地,上述光学成像系统还可包括用于校正色彩偏差的滤光片和/或用于保护位于成像面上的感光元件的保护玻璃。 根据本发明的上述实施方式的光学成像系统可采用多片镜片,例如上述的七片。通过合理分配各透镜的光焦度、面型、各透镜的中心厚度以及各透镜之间的轴上间距等,使得光学成像系统具有较大的成像像面,具有成像范围广和成像质量高的特点,并保证了手机的超薄性。 在示例性实施方式中,各透镜的镜面中的至少一个为非球面镜面,即,第一透镜的物侧面至第七透镜的像侧面中的至少一个镜面为非球面镜面。非球面透镜的特点是:从透镜中心到透镜周边,曲率是连续变化的,与从透镜中心到透镜周边具有恒定曲率的球面透镜不同,非球面透镜具有更佳的曲率半径特性,具有改善歪曲像差及改善像散像差的优点。采用非球面透镜后,能够尽可能地消除在成像的时候出现的像差,从而改善成像质量。可选地,第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜和第七透镜中的每个透镜的物侧面和像侧面中的至少一个为非球面镜面。可选地,第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜和第七透镜中的每片透镜的物侧面和像侧面均为非球面镜面。 然而,本领域的技术人员应当理解,在未背离本申请要求保护的技术方案的情况下,可改变构成光学成像系统的透镜数量,来获得本说明书中描述的各个结果和优点。例如,虽然在实施方式中以七个透镜为例进行了描述,但是该光学成像系统不限于包括七个透镜,如果需要,该光学成像系统还可包括其它数量的透镜。 下面参照附图进一步描述适用于上述实施例的光学成像系统的具体实施例。 具体实施例1 图1为本发明光学成像系统实施例1的透镜组结构示意图,光学成像系统沿光轴由物侧至像侧依序包括:光阑STO、第一透镜E1、第二透镜E2、第三透镜E3、第四透镜E4、第五透镜E5、第六透镜E6、第七透镜E7、滤光片E8和成像面S17。 第一透镜E1具有正光焦度,其物侧面S1为凸面,像侧面S2为凹面。第二透镜E2具有负光焦度,其物侧面S3为凸面,像侧面S4为凹面。第三透镜E3具有正光焦度,其物侧面S5为凸面,像侧面S6为凹面。第四透镜E4具有负光焦度,其物侧面S7为凸面,像侧面S8为凹面。第五透镜E5具有正光焦度,其物侧面S9为凸面,像侧面S10为凹面。第六透镜E6具有正光焦度,其物侧面S11为凸面,像侧面S12为凸面。第七透镜E7具有负光焦度,其物侧面S13为凸面,像侧面S14为凹面。滤光片E8具有物侧面S15和像侧面S16。来自物体的光依序穿过表面S1至S16的各表面并最终成像在成像面S17上。 如表1所示,为实施例1的光学成像系统的基本参数表,其中,曲率半径、厚度、焦距的单位均为毫米(mm)。
表1 如表2所示,在实施例1中,光学成像系统的总有效焦距f=8.60mm,从第一透镜E1的物侧面S1至成像面S17在光轴上的距离TTL=9.50mm,成像面S17上有效像素区域对角线长的一半ImgH=3.39mm,光学成像系统的最大视场角的一半Semi-FOV=20.6°。
表2 实施例1中的光学成像系统满足: f/EPD=1.23,其中,f为光学成像系统的有效焦距,EPD为光学成像系统的入瞳直径; (f1+R1)/f=1.34,其中,f1为第一透镜的有效焦距,R1为第一透镜物侧面的曲率半径,f为光学成像系统的有效焦距; f2/R3=-2.43,其中,f2为第二透镜的有效焦距,R3为第二透镜物侧面的曲率半径; f/R4=3.50,其中,f为光学成像系统的有效焦距,R4为第二透镜像侧面的曲率半径; f3/R5=4.23,其中,f3为第三透镜的有效焦距,R5为第三透镜物侧面的曲率半径; (f4+R8)/f=-2.87,其中,f4为第四透镜的有效焦距,R8为第四透镜像侧面的曲率半径,f为光学成像系统的有效焦距; f6/R12=-1.46,其中,f6为第六透镜的有效焦距,R12为第六透镜像侧面的曲率半径; f7/R14=-2.77,其中,f7为第七透镜的有效焦距,R14为第七透镜像侧面的曲率半径; CT1/CT2=4.34,其中,CT1为第一透镜在光轴上的中心厚度,CT2为第二透镜在光轴上的中心厚度; CT3/CT5=2.92,其中,CT3为第三透镜在光轴上的中心厚度,CT5为第五透镜在光轴上的中心厚度; 1/(T45×T34)=17.69mm Semi-FOV=20.6°,其中,Semi-FOV为光学成像系统的最大视场角的一半; TTL/ImgH=2.80,其中,TTL为第一透镜物侧面至成像面的轴上距离,ImgH为成像面上有效像素区域对角线长的一半。 在实施例1中,第一透镜E1至第七透镜E7中的任意一个透镜的物侧面和像侧面均为非球面,各非球面透镜的面型x可利用但不限于以下非球面公式进行限定:
其中,x为非球面沿光轴方向在高度为h的位置时,距非球面顶点的距离矢高;c为非球面的近轴曲率,c=1/R(即,近轴曲率c为表1中曲率半径R的倒数);k为圆锥系数;Ai为非球面第i-th阶的修正系数。 在实施例1中,第一透镜E1至第七透镜E7中的任意一个透镜的物侧面和像侧面均为非球面,表3示出了可用于实施例1中各非球面镜面S1-S14的高次项系数A
表3 图2a示出了实施例1的光学成像系统的轴上色差曲线,其表示不同波长的光线经由镜头后的会聚焦点偏离。图2b示出了实施例1的光学摄像镜头的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图2c示出了实施例1的光学成像系统的畸变曲线,其表示不同像高对应的畸变大小值。图2d示出了实施例1的光学成像系统的倍率色差曲线,其表示光线经由镜头后在成像面上的不同的像高的偏差。根据图2a至图2d所示可知,实施例1所给出的光学成像系统能够实现良好的成像品质。 具体实施例2 图3为本发明光学成像系统实施例2的透镜组结构示意图,光学成像系统沿光轴由物侧至像侧依序包括:光阑STO、第一透镜E1、第二透镜E2、第三透镜E3、第四透镜E4、第五透镜E5、第六透镜E6、第七透镜E7、滤光片E8和成像面S17。 第一透镜E1具有正光焦度,其物侧面S1为凸面,像侧面S2为凸面。第二透镜E2具有负光焦度,其物侧面S3为凸面,像侧面S4为凹面。第三透镜E3具有正光焦度,其物侧面S5为凸面,像侧面S6为凹面。第四透镜E4具有负光焦度,其物侧面S7为凸面,像侧面S8为凹面。第五透镜E5具有正光焦度,其物侧面S9为凸面,像侧面S10为凹面。第六透镜E6具有正光焦度,其物侧面S11为凸面,像侧面S12为凸面。第七透镜E7具有负光焦度,其物侧面S13为凸面,像侧面S14为凹面。滤光片E8具有物侧面S15和像侧面S16。来自物体的光依序穿过表面S1至S16的各表面并最终成像在成像面S17上。 如表4所示,为实施例2的光学成像系统的基本参数表,其中,曲率半径、厚度、焦距的单位均为毫米(mm)。
表4 如表5所示,在实施例2中,光学成像系统的总有效焦距f=8.47mm,从第一透镜E1的物侧面S1至成像面S17在光轴上的距离TTL=9.67mm,成像面S17上有效像素区域对角线长的一半ImgH=3.39mm,光学成像系统的最大视场角的一半Semi-FOV=20.3°。各个关系式的参数如同第一实施例所阐释,各个关系式的数值如下表中所列。
表5 在实施例2中,第一透镜E1至第七透镜E7中的任意一个透镜的物侧面和像侧面均为非球面,表6示出了可用于实施例2中各非球面镜面S1-S14的高次项系数A
表6 图4a示出了实施例2的光学成像系统的轴上色差曲线,其表示不同波长的光线经由镜头后的会聚焦点偏离。图4b示出了实施例2的光学摄像镜头的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图4c示出了实施例2的光学成像系统的畸变曲线,其表示不同像高对应的畸变大小值。图4d示出了实施例2的光学成像系统的倍率色差曲线,其表示光线经由镜头后在成像面上的不同的像高的偏差。根据图4a至图4d所示可知,实施例2所给出的光学成像系统能够实现良好的成像品质。 具体实施例3 图5为本发明光学成像系统实施例3的透镜组结构示意图,光学成像系统沿光轴由物侧至像侧依序包括:光阑STO、第一透镜E1、第二透镜E2、第三透镜E3、第四透镜E4、第五透镜E5、第六透镜E6、第七透镜E7、滤光片E8和成像面S17。 第一透镜E1具有正光焦度,其物侧面S1为凸面,像侧面S2为凹面。第二透镜E2具有负光焦度,其物侧面S3为凸面,像侧面S4为凹面。第三透镜E3具有正光焦度,其物侧面S5为凸面,像侧面S6为凹面。第四透镜E4具有负光焦度,其物侧面S7为凸面,像侧面S8为凹面。第五透镜E5具有负光焦度,其物侧面S9为凸面,像侧面S10为凹面。第六透镜E6具有正光焦度,其物侧面S11为凸面,像侧面S12为凸面。第七透镜E7具有负光焦度,其物侧面S13为凸面,像侧面S14为凹面。滤光片E8具有物侧面S15和像侧面S16。来自物体的光依序穿过表面S1至S16的各表面并最终成像在成像面S17上。 如表7所示,为实施例3的光学成像系统的基本参数表,其中,曲率半径、厚度、焦距的单位均为毫米(mm)。
表7 如表8所示,在实施例3中,光学成像系统的总有效焦距f=8.45mm,从第一透镜E1的物侧面S1至成像面S17在光轴上的距离TTL=9.59mm,成像面S17上有效像素区域对角线长的一半ImgH=3.39mm,光学成像系统的最大视场角的一半Semi-FOV=20.5°。各个关系式的参数如同第一实施例所阐释,各个关系式的数值如下表中所列。
表8 在实施例3中,第一透镜E1至第七透镜E7中的任意一个透镜的物侧面和像侧面均为非球面,表9示出了可用于实施例3中各非球面镜面S1-S14的高次项系数A
表9 图6a示出了实施例3的光学成像系统的轴上色差曲线,其表示不同波长的光线经由镜头后的会聚焦点偏离。图6b示出了实施例3的光学摄像镜头的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图6c示出了实施例3的光学成像系统的畸变曲线,其表示不同像高对应的畸变大小值。图6d示出了实施例3的光学成像系统的倍率色差曲线,其表示光线经由镜头后在成像面上的不同的像高的偏差。根据图6a至图6d所示可知,实施例3所给出的光学成像系统能够实现良好的成像品质。 具体实施例4 图7为本发明光学成像系统实施例4的透镜组结构示意图,光学成像系统沿光轴由物侧至像侧依序包括:光阑STO、第一透镜E1、第二透镜E2、第三透镜E3、第四透镜E4、第五透镜E5、第六透镜E6、第七透镜E7、滤光片E8和成像面S17。 第一透镜E1具有正光焦度,其物侧面S1为凸面,像侧面S2为凹面。第二透镜E2具有负光焦度,其物侧面S3为凸面,像侧面S4为凹面。第三透镜E3具有正光焦度,其物侧面S5为凸面,像侧面S6为凹面。第四透镜E4具有负光焦度,其物侧面S7为凹面,像侧面S8为凹面。第五透镜E5具有正光焦度,其物侧面S9为凸面,像侧面S10为凹面。第六透镜E6具有正光焦度,其物侧面S11为凸面,像侧面S12为凸面。第七透镜E7具有负光焦度,其物侧面S13为凸面,像侧面S14为凹面。滤光片E8具有物侧面S15和像侧面S16。来自物体的光依序穿过表面S1至S16的各表面并最终成像在成像面S17上。 如表10所示,为实施例4的光学成像系统的基本参数表,其中,曲率半径、厚度、焦距的单位均为毫米(mm)。
表10 如表11所示,在实施例4中,光学成像系统的总有效焦距f=8.26mm,从第一透镜E1的物侧面S1至成像面S17在光轴上的距离TTL=10.04mm,成像面S17上有效像素区域对角线长的一半ImgH=3.39mm,光学成像系统的最大视场角的一半Semi-FOV=21.2°。各个关系式的参数如同第一实施例所阐释,各个关系式的数值如下表中所列。
表11 在实施例4中,第一透镜E1至第七透镜E7中的任意一个透镜的物侧面和像侧面均为非球面,表12示出了可用于实施例4中各非球面镜面S1-S14的高次项系数A
表12 图8a示出了实施例4的光学成像系统的轴上色差曲线,其表示不同波长的光线经由镜头后的会聚焦点偏离。图8b示出了实施例4的光学摄像镜头的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图8c示出了实施例4的光学成像系统的畸变曲线,其表示不同像高对应的畸变大小值。图8d示出了实施例4的光学成像系统的倍率色差曲线,其表示光线经由镜头后在成像面上的不同的像高的偏差。根据图8a至图8d所示可知,实施例4所给出的光学成像系统能够实现良好的成像品质。 具体实施例5 图9为本发明光学成像系统实施例5的透镜组结构示意图,光学成像系统沿光轴由物侧至像侧依序包括:光阑STO、第一透镜E1、第二透镜E2、第三透镜E3、第四透镜E4、第五透镜E5、第六透镜E6、第七透镜E7、滤光片E8和成像面S17。 第一透镜E1具有正光焦度,其物侧面S1为凸面,像侧面S2为凹面。第二透镜E2具有负光焦度,其物侧面S3为凸面,像侧面S4为凹面。第三透镜E3具有正光焦度,其物侧面S5为凸面,像侧面S6为凸面。第四透镜E4具有负光焦度,其物侧面S7为凸面,像侧面S8为凹面。第五透镜E5具有正光焦度,其物侧面S9为凸面,像侧面S10为凹面。第六透镜E6具有正光焦度,其物侧面S11为凸面,像侧面S12为凸面。第七透镜E7具有负光焦度,其物侧面S13为凸面,像侧面S14为凹面。滤光片E8具有物侧面S15和像侧面S16。来自物体的光依序穿过表面S1至S16的各表面并最终成像在成像面S17上。 如表13所示,为实施例5的光学成像系统的基本参数表,其中,曲率半径、厚度、焦距的单位均为毫米(mm)。
表13 如表14所示,在实施例5中,光学成像系统的总有效焦距f=8.39mm,从第一透镜E1的物侧面S1至成像面S17在光轴上的距离TTL=10.12mm,成像面S17上有效像素区域对角线长的一半ImgH=3.39mm,光学成像系统的最大视场角的一半Semi-FOV=21.3°。各个关系式的参数如同第一实施例所阐释,各个关系式的数值如下表中所列。
表14 在实施例5中,第一透镜E1至第七透镜E7中的任意一个透镜的物侧面和像侧面均为非球面,表15示出了可用于实施例5中各非球面镜面S1-S14的高次项系数A
表15 图10a示出了实施例5的光学成像系统的轴上色差曲线,其表示不同波长的光线经由镜头后的会聚焦点偏离。图10b示出了实施例5的光学成像系统的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图10c示出了实施例5的光学成像系统的畸变曲线,其表示不同像高对应的畸变大小值。图10d示出了实施例5的光学成像系统的倍率色差曲线,其表示光线经由镜头后在成像面上的不同的像高的偏差。根据图10a至图10d所示可知,实施例5所给出的光学成像系统能够实现良好的成像品质。 具体实施例6 图11为本发明光学成像系统实施例6的透镜组结构示意图,光学成像系统沿光轴由物侧至像侧依序包括:光阑STO、第一透镜E1、第二透镜E2、第三透镜E3、第四透镜E4、第五透镜E5、第六透镜E6、第七透镜E7、滤光片E8和成像面S17。 第一透镜E1具有正光焦度,其物侧面S1为凸面,像侧面S2为凹面。第二透镜E2具有负光焦度,其物侧面S3为凸面,像侧面S4为凹面。第三透镜E3具有正光焦度,其物侧面S5为凸面,像侧面S6为凹面。第四透镜E4具有负光焦度,其物侧面S7为凸面,像侧面S8为凹面。第五透镜E5具有正光焦度,其物侧面S9为凸面,像侧面S10为凹面。第六透镜E6具有正光焦度,其物侧面S11为凹面,像侧面S12为凸面。第七透镜E7具有负光焦度,其物侧面S13为凸面,像侧面S14为凹面。滤光片E8具有物侧面S15和像侧面S16。来自物体的光依序穿过表面S1至S16的各表面并最终成像在成像面S17上。 如表16所示,为实施例6的光学成像系统的基本参数表,其中,曲率半径、厚度、焦距的单位均为毫米(mm)。
表16 如表17所示,在实施例6中,光学成像系统的总有效焦距f=8.48mm,从第一透镜E1的物侧面S1至成像面S17在光轴上的距离TTL=9.59mm,成像面S17上有效像素区域对角线长的一半ImgH=3.39mm,光学成像系统的最大视场角的一半Semi-FOV=20.5°。各个关系式的参数如同第一实施例所阐释,各个关系式的数值如下表中所列。
表17 在实施例6中,第一透镜E1至第七透镜E7中的任意一个透镜的物侧面和像侧面均为非球面,表18示出了可用于实施例6中各非球面镜面S1-S14的高次项系数A
表18 图12a示出了实施例6的光学成像系统的轴上色差曲线,其表示不同波长的光线经由镜头后的会聚焦点偏离。图12b示出了实施例6的光学成像系统的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图12c示出了实施例6的光学成像系统的畸变曲线,其表示不同像高对应的畸变大小值。图12d示出了实施例6的光学成像系统的倍率色差曲线,其表示光线经由镜头后在成像面上的不同的像高的偏差。根据图12a至图12d所示可知,实施例6所给出的光学成像系统能够实现良好的成像品质。 以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、改进、等同替换等,均应包含在本发明的保护范围之内。
- 校准数字光学成像系统的方法、校正数字光学成像系统中像差的方法及数字光学成像系统
- 一种衍射光学成像系统及包含该衍射光学成像系统的成像光谱仪