内部调节系统
文献发布时间:2023-06-19 11:26:00
技术领域
本公开涉及一种用于车辆内部部件的定位系统以及一种操作该定位系统的方法。
背景技术
车辆通常包括在车辆车厢内布置的一个或多个可调节的且可重新构造的座椅组件。例如,座椅组件中的一个或多个座椅组件可被调节,以提供更容易地进入和离开车辆车厢。座椅组件中的一个或多个座椅组件可能彼此干涉或碰撞或与在车辆车厢内布置的物体干涉或碰撞。
发明内容
根据一个实施例,提供了一种车辆内部系统,该车辆内部系统包括被布置在车辆车厢内的第一座椅组件、第一传感器、第二传感器以及控制器。第一传感器和第二传感器每一个都可被布置在车辆车厢内。第一传感器可被配置用以获取指示障碍物在预定坐标系内的定位的第一信号。第二传感器可被配置用以获取指示第一座椅组件在该预定坐标系内的定位的第二信号。控制器可被配置用以从第一传感器接收所述信号,并且被配置用以基于第一信号并且相对于在预定坐标系内的第一座椅组件的一部分来绘制(map)障碍物的一部分。
根据另一个实施例,提供了一种车辆内部系统,该车辆内部系统包括被布置在车辆车厢内的第一座椅组件、第一传感器、第二传感器以及控制器。第一传感器可以是被布置在车辆车厢内的传感器并且被配置用以获取指示第一车辆座椅在预定坐标系内的定位的第一信号。第二传感器可被布置在车辆车厢内并且被配置用以获取指示第二座椅组件在该预定坐标系内的定位的第二信号。控制器可被配置用以从第一传感器接收信号,并且被配置用以基于第一信号并且相对于基于第二信号的在预定坐标系内的第二座椅组件的一部分来绘制第一座椅组件的一部分。
根据另一个实施例,提供了一种控制被布置在车辆的内部内的内部组件的相对运动的方法,其中该车辆的内部设置有第一内部组件和第二内部组件。该方法可包括:接收指示第一内部组件在预定坐标系内的定位的第一信号;接收指示第二内部组件在该预定坐标系内的定位的第二信号;以及基于第一信号并且相对于基于第二信号的在预定坐标系内的第二座椅组件的一部分来绘制第一内部组件的一部分。
附图说明
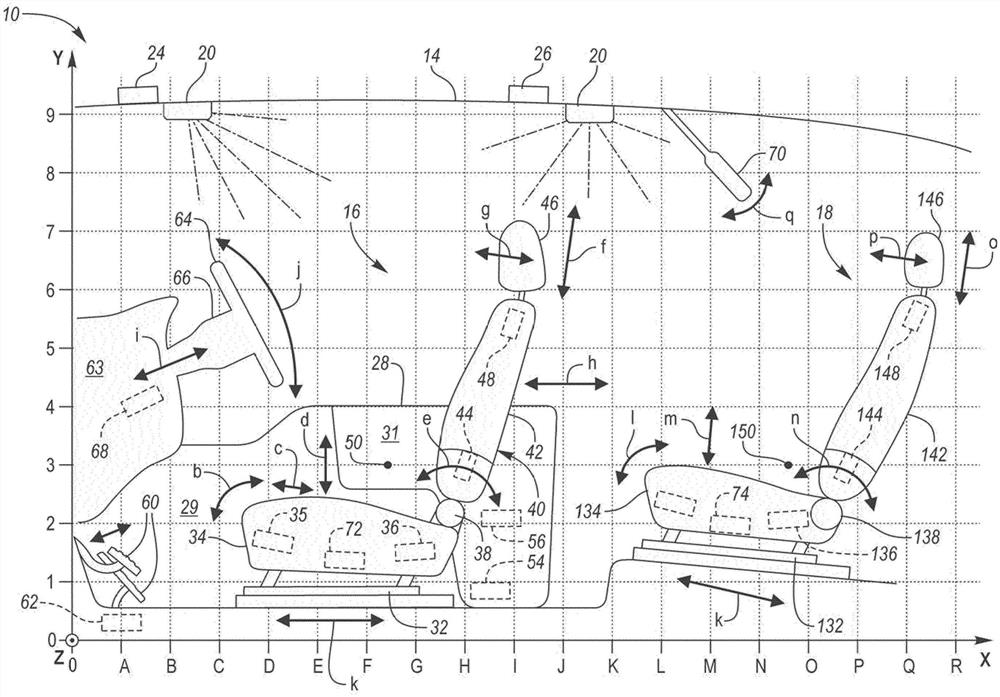
图1示出了示例性车辆内部和x-y坐标系的平面视图。
图1A示出了车辆内部和x-y坐标系的部分平面视图。
图2示出了图1中的车辆内部的x-z坐标系。
图3示出了示例性示意图。
图4示出了操作示例性内部调节系统的示例性方法的流程图。
具体实施方式
本公开的实施例在本文中描述。但是,应当理解的是,所公开的实施例仅仅是示例并且其它实施例可采取各种形式和可替代的形式。附图不一定按比例;一些特征可能被夸大或缩小,以示出特定部件的细节。因此,本文公开的具体的结构和功能细节不应解释为限制性的,而是仅仅作为用于教导本领域的技术人员以各种方式采用这些实施例的代表性基础。正如本领域普通技术人员将理解的,参考这些附图中的任何一个附图示出和描述的各种特征可以与在一个或多个其它附图中示出的特征组合,以产生未被明确示出和描述的实施例。所示出的特征的组合提供用于典型应用的代表性实施例。但是,对于特别的应用或实施方式而言,期望的是与该公开的教导相一致的这些特征的各种组合和修改。
车辆内部包括被布置在车辆内部内的、可以被调节或重新构造的各种内部组件。在特定状况下,当内部部件中的一个或多个内部部件被致动时,内部组件中的一个内部组件可能与另一个内部部件碰撞。车辆内部可包括被附接到车辆顶棚14的一个或多个传感器,诸如前传感器20和后传感器20。这些传感器可被配置用以接收指示内部部件的位置的信号并且将这些信号提供到控制器80。该控制器80可在预定坐标系内绘制这些内部组件的部分。
术语传感器可指被附接到车辆顶棚14的视觉传感器20,它们可被定位在车辆内部内的其它适合地点上。术语传感器也可指在马达(例如,长度调节马达72、调角器马达44(recliner motor 44)、高度调节马达以及本文所述的所有其它马达)内或操作上耦合到上述马达的一个或多个传感器(例如,霍尔传感器、光学或电容编码器、解析器、电流传感器、波纹计数器)。因此,当提及马达时,该马达集合地包括传感器和马达。
图1示出了车辆10的车辆车厢(诸如内部)的平面视图。图2示出了车辆10的车辆车厢(诸如内部)的顶视图。车辆10包括地板12和被布置在地板12上方的顶板14。车辆内部10包括第一座椅组件16(诸如第一排驾驶员座椅组件)和第二座椅组件18(诸如第二排驾驶员座椅组件)。第一排驾驶员座椅组件可包括轨道组件32,该轨道组件32包括一对上轨和下轨。轨道组件32的上轨可被构造成响应于长度调节器马达36的致动而在纵向方向上移动(例如,滑动或平移、关节式运动)。座垫组件34可被联接到轨道组件32,使得座垫组件34与轨道组件32一起平移。
在一个或多个实施例中,轨道组件32可包括被布置在车辆地板12内或下方的一个或多个导轨。
座垫组件34可包括倾斜调节马达35,该倾斜调节马达35可被构造用以枢转座垫组件34的前部,以沿着方向箭头b改变或调节座垫组件34的一部分。如另一个示例,座垫组件34的前部可沿着方向箭头c移动(例如,滑动或平移、关节式运动)。座垫组件34可设置有高度调节机构,该高度调节机构设置有高度调节马达36。高度调节马达可使座垫组件34竖直(诸如沿着方向箭头d)移动。靠背42可通过调角器38附接到座垫组件34。调角器38可促进靠背42沿着枢转方向箭头e相对于座垫组件34的枢转运动。调角器可通过驱动被联接(例如,直接地或间接地联接)到调角器38的调角器马达44而被致动。
可调节头枕46可从靠背42延伸。可调节头枕46可被头枕马达48致动,以使头枕46沿着方向箭头f竖直移动以及沿着方向箭头g水平移动。
中央控制台28可被布置在车辆车厢10内,与第一排驾驶员座椅组件16相邻。中央控制台28可包括固定部29和移动部31,该移动部31可相对于固定部29移动(例如,滑动、平移)。中央控制台28可包括设置有中央控制台调节马达56的机构,该中央控制台调节马达56可被致动,以使移动部31沿着方向箭头h移动离开固定部29。
车辆踏板60可被布置在第一排驾驶员座椅组件16的前方。踏板60可被联接到踏板调节机构,该踏板调节机构可包括踏板调节马达62。踏板调节马达62可被致动,以调节在向前和向后方向上平移车辆踏板。仪表板63可被布置在车辆踏板60的上方并且包括方向盘64。方向盘64可包括转向调节机构,该转向调节机构包括方向盘调节马达68,该方向盘调节马达68可沿着方向箭头i平移。方向盘调节马达68还可沿着方向箭头j使方向盘64和转向柱66旋转或枢转。
车辆内部10还可设置有被布置在第一排驾驶员座椅组件的后方的第二排驾驶员侧座椅组件。正如以下将详细描述的那样,第二排驾驶员侧座椅组件可包括与第一排驾驶员侧座椅组件类似的或同样的部件和子组件。在一个或多个实施例中,第二排驾驶员侧座椅组件可被手动调节。
第二排驾驶员座椅组件可包括轨道组件132,该轨道组件132包括一对上轨和下轨。轨道组件32的上轨可被构造用以响应于长度调节器马达136的致动而在纵向方向上移动(例如,滑动或平移、关节式运动)。座垫组件134可被联接到轨道组件132,使得座垫组件134与轨道组件132一起沿着方向箭头k平移。
第二排座椅组件18的座垫组件134可包括倾斜调节马达135,该倾斜调节马达135可被构造用以使座垫组件134的前部枢转,以沿着方向箭头b改变或调节座垫组件134的一部分。如另一个示例,座垫组件134的前部可沿着方向箭头l移动(例如,滑动或平移、关节式运动)。座垫组件134可设置有高度调节机构,该高度调节机构设置有高度调节马达136。高度调节马达136可竖直(诸如沿方向箭头m)移动座垫组件134。靠背142可通过调角器138被附接到座垫组件134。调角器138可促进靠背142沿着方向箭头n相对于座垫组件134的枢转运动。调角器可通过驱动被联接(例如直接地或间接地联接)到调角器138的调角器马达144而被致动。
第二排座椅组件18的可调节头枕146可从靠背142延伸。可调节头枕146可被头枕马达148致动,以使头枕146沿着方向箭头o竖直移动以及沿着方向箭头p水平移动。
一个或多个传感器可被固定到车辆10的顶棚14。例如,传感器20可被固定到车辆10的顶棚14。传感器20可包括控制器或电子控制单元(ECU)24、26并且可以是若干类型的传感器(例如电容、视觉或光学类型)中的一个。在一个或多个实施例中,可使用被配置用以通过利用脉冲激光照射目标而测量与目标的距离的激光雷达传感器。如另一个示例,可使用雷达传感器,以测量车辆内部10内的各种部件的位置。
在一个或多个实施例中,在车辆内部10中可设置包括显示器70的娱乐系统。显示器70可被枢转地附接到车辆顶棚14并且能够沿着方向箭头q在收起位置和展开位置之间移动。
控制器80(图3)可接收指示车辆内部内的一个或多个部件或组件或障碍物(可移动的或静止的)或两者的在预定坐标系内的一个或多个位置的信号。该信号可从被布置在上述组件内的马达接收或从传感器20接收或从两者接收。控制器80可绘制障碍物或组件或两者的部分。响应于接收到这些信号,控制器80可提供信号,以改变或停止组件中的一个或多个组件的致动或运动,以避免碰撞。
在一个或多个实施例中,方向盘调节马达68可将方向盘柱66和方向盘64在预定坐标系的x-y轴内的相对位置(例如D4)提供到控制器80。响应于致动或致动方向盘调节马达68或第一座椅组件16的一个或多个部分或两者的请求,控制器80可将一个或多个信号提供到方向盘调节马达68或提供到第一座椅组件16的马达中的一个马达或提供到以上两者,以改变它们在预定坐标系内的相应的位置。作为一个示例,响应于长度调节马达72的沿着方向箭头k的朝向方向盘64的致动和调角器马达44的沿着方向箭头e朝向方向盘64的致动,在方向盘64和头枕46之间的碰撞可被预测到。响应于预测到的碰撞,头枕调节马达48可被致动,以使头枕46沿着方向箭头f缩回,或方向盘调节马达68可被致动,以使方向盘沿着方向箭头i移动,或者使方向盘64和头枕46两者都被致动。
类似地是,踏板60可被踏板调节马达62调节,以改变它们在预定坐标系内的相对于第一座椅组件16的相对位置。
在一个或多个实施例中,传感器20可将显示器70、顶棚14或靠背组件42在预定坐标系的x-y轴内的相对位置提供到控制器80。响应于致动或致动第二排座椅组件18的一个或多个部分的请求,控制器80可预测到在头枕146和顶棚14或显示器70或靠背42之间的碰撞。响应于预测到的碰撞,控制器可提供信号到以下马达并且提供一个或多个信号,以停止或改变长度调节马达74、高度调节马达136、调角器马达144、头枕调节马达148的旋转或上述马达的某种组合的旋转,以避免预测到的碰撞。
图1A示出了包括在第二排座椅组件18中就座的乘员的车辆内部10的一部分的详细视图。响应于一个或多个触发或动作,传感器20发出并接收在车辆车厢10内的信号,这些信号指示在第二排座椅组件18中就座的乘员的一个或多个位置。例如,传感器20可接收指示大约在坐标J1和K4之间延伸的乘员的腿的一部分的信号。乘员的腿的坐标可相对于第一排座椅组件16的一个或多个部分进行比较或绘制。例如,控制器可比较乘员的腿的坐标与座垫组件34的后部(H1和I2),以及背框架组件40(I2和J5)。这些坐标中的一个或多个坐标可通过被包括在第一座椅组件16的马达内的一个或多个传感器或操作上连接到第一座椅组件16的马达的一个或多个传感器来获取。而且,第一排座椅组件16的这些坐标中的一个或多个坐标可通过传感器20来获取或验证。
在一个或多个实施例中,座垫组件34的长度调节器马达72可将其在预定坐标系的x轴内的相对位置(例如F)提供到控制器80。高度调节马达36可将其在预定坐标系的x-y轴内的相对位置(例如H1.5)提供到控制器80。同样地是,调角器马达44可将信号发送到控制器80,这些信号指示调角器马达44的在x-y轴内的相对位置(例如H1.5)。控制器80可被编程,以包括至少部分地基于前述坐标的靠背42和座垫组件34的尺寸。
响应于一个或多个触发条件,诸如请求长度调节马达72的致动或致动长度调节马达72,控制器80可预测到在靠背组件42或座垫组件34或两者和第二排座椅组件18中的一个或多个乘员的腿之间的碰撞。控制器80然后可发送信号到长度调节马达72,以停止马达72或反转马达72的旋转方向。在一个或多个实施例中,控制器80可发送信号到第二排座椅组件18的长度调节马达74,以沿着箭头方向k向后致动或移动第二排座椅组件18,以避免该碰撞。
在一个或多个实施例中,响应于座椅组件16的一个或多个部分的位置处在乘员的腿的预定距离内,控制器80可发送信号。例如,在预定坐标轴内的每一条竖直线之间的距离可代表20毫米并且该预定距离可以是5毫米或为预定坐标系的两条竖直线之间的距离的25%。
响应于在预定时段内(例如,几秒)座椅组件16的一个或多个部分相对于预定坐标系与障碍物(例如乘员的腿、其它内部部件)的改变位置,控制器80可提供指示预测到的碰撞的信号。作为响应,控制器80可改变(例如,增加、减小)在座椅组件16内的马达中的一个或多个马达的运转速度,以避免该预测到的碰撞。
在一个或多个实施例中,座椅组件16的所述一个或多个部分相对于预定坐标系与障碍物的预定距离和改变位置可被称为妨碍条件。
图3示出了控制系统300的示例性示意图。传感器20每一个可分别包括电子控制单元24和26。传感器20可接收车辆内部部件中的一个或多个车辆内部部件的或车辆内部内的一个或多个物体的在预定坐标系内的一个或多个位置。这些位置可被传达到控制器80。第一座椅组件16的马达可与第一排ECU73通信,并且第二排座椅组件18的马达可与第二排ECU74通信。第一排ECU73和第二排ECU74可将马达在预定坐标系内的相对位置传达到控制器80。控制器可绘制在车辆内部10内的车辆部件或物体或两者的一个或多个部分。控制器80可被编程,以包括第一座椅排座椅组件16和第二排座椅组件18的相对尺寸。基于尺寸和从传感器20、第一排ECU73或第二排ECU74接收到的相对位置或上述的某种组合,控制器可预测到碰撞。
控制器80可发送信号到车辆内部10内的一个或多个马达,该马达统称为马达82,以致动一个或多个车辆部件的一个或多个部分。控制器可指定该一个或多个马达82的运转速度(运转速度)。马达82中的一个或多个马达可将实际的或记录的运转速度传达到控制器80。为了避免碰撞,控制器80可停止、反转或减慢马达82的运转速度。
由控制器80执行的控制逻辑或功能可被流程图或类似的示意图诸如图4中的流程图400表示。图4提供代表性的控制策略和/或逻辑,可使用一个或多个处理策略诸如轮询、事件驱动、中断驱动、多任务、多线程等等来实施代表性的控制策略和/或逻辑。这样,所示的各种步骤或功能可按照所示的次序并行地执行,或在一些情况中被省略掉。
控制器80可包括与各种类型的计算机可读存储装置或介质通信的微处理器或中央处理单元(CPU)。计算机可读存储装置或介质可包括呈只读存储器(ROM)、随机存取存储器(RAM)和持久存储器(KAM)的易失性和非易失性存储,例如KAM是可用于当CPU断电时存储各种操作变量的永久的或非易失性的存储器。计算机可读存储装置或介质可使用许多已知存储器装置诸如PROM(可编程只读存储器)、EPROM(电PROM)、EEPROM(电可擦除PROM)、闪存或能够存储数据的任何其它电的、磁的、光学的或组合式的存储器装置中的任一个来实施,其中这些数据中的一些数据表示可执行指令,被控制器80用来控制车辆内部内的一个或多个组件。
尽管不总是明确地示出,但本领域普通技术人员将认识到,所示出的步骤或功能中的一个或多个步骤或功能可取决于所使用的特别的处理策略而被重复执行。类似地是,为了实现本文所述的特征和优点,不是一定要求处理的顺序,而是处理的顺序是为了容易的示出和描述而提出的。控制逻辑可主要用由微处理器控制的车辆、图3中示出的马达82或ECU所执行的软件来实施。
取决于特别的应用,控制逻辑可以用一个或多个控制器中的软件、硬件或软件和硬件的组合来实施。当用软件实施时,控制逻辑可以以具有所存储的数据的一个或多个计算机可读存储装置或介质提供,其中该存储的数据表示由计算机执行以控制车辆或其子系统的代码或指令。计算机可读存储装置或介质可包括若干种已知的物理装置中的一个或多个,其中这些物理装置利用电的、磁的和/或光学的存储,以保持可执行指令和相关联的校准信息、操作变量等等。
控制策略可响应于一个或多个触发事件而开始,这由操作402代表。作为一个示例,策略可包括控制器80接收以下信号,该信号指示用户通过钥匙、移动装置或其它适合手段接近车辆。作为另一个示例,该处理可响应于用户进入车辆或打开车辆车门而开始。一个或多个传感器20可发出并且提供指示在车辆内部10内的障碍物的信号。该信号可指示障碍物的存在以及障碍物在预定坐标系内的地点或定位。例如,如果障碍物(例如包裹或包)被布置在坐标H,0.5,C’附近,则传感器将会把这些坐标传达到控制器80。
在操作404之后,控制器80可分支到操作406,以监视或检测在车辆内部10内的内部部件(例如,第一座椅组件16、第二座椅组件18)中的一个或多个内部部件的定位。在第一座椅组件16内的一个或多个马达82或第一排ECU73可将它们在预定坐标系内的相应位置的信号提供到控制器80。控制器80然后可确定或绘制第一座椅组件16整体上在预定坐标系内的定位。例如,长度调节马达72可将指示其沿着x轴的位置的信号提供到控制器80。控制器80也可基于在控制器80内编程的尺寸来绘制座椅组件的部分。
控制器可接收调节内部部件中的一个或多个内部部件的请求,如由操作408所表示的那样。控制器可响应于一个或多个触发条件而接收请求。在一个或多个实施例中,布置在车辆车厢内的开关的操作可以是触发条件。作为另一个示例,触发条件可以是对于正在接近车辆的一个或多个用户的识别。
在一个或多个实施例中,控制器80可从传感器20接收指示内部部件的定位的信号。基于来自传感器20的信号的定位可与和操作406相关联的定位进行比较。虽然没有明确地示出,但是如果与操作406相关联的定位与和操作410相关联的定位相差了预定值,则控制器80可返回到操作406。
在操作412中,控制器80可记录(诸如存储)在操作410中检测到的障碍物中的一个或多个障碍物的定位或在操作406中绘制的车辆内部部件的定位或上述的某种组合。
控制器80可将信号提供到ECU72、74或马达80或上述的某种组合,以致动内部部件中的一个或多个内部部件,如操作414所表示的那样。控制器80然后可预测到内部部件中的至少一个内部部件与障碍物中的至少一个障碍物之间的碰撞。该预测到的碰撞可基于许多数据点被确定,所述许多数据点诸如是沿着坐标图的预定距离、被致动的部件相对于固定的障碍物或内部部件的预定距离或运转速度以及相对于彼此移动的两个内部部件之间的距离和运转速度。在一个或多个实施例中,乘员的尺寸、乘员的就座位置或上述的某种组合可被传感器20检测到并且提供到控制器,使得控制器可基于乘员的尺寸或乘员的就座位置来检测可能的碰撞。
如果在操作416中预测到碰撞,则控制器可分支到操作418并且采取适合的动作,以避免该碰撞。控制器可发送信号,以反转马达80中的一个或多个马达的旋转方向,以改变相关联的内部部件的方向性运动。在一个或多个实施例中,控制器80可发送信号,以停止马达80中的一个或多个马达的致动。而且,控制器80可改变(例如增加或减小)一个或多个内部部件的运转速度,以避免碰撞。例如,如果两个或更多个车辆内部部件被同时致动并且在给定时间点处存在预测到的碰撞,则可改变任一内部部件的运转速度,以避免该预测到的碰撞。
在一个或多个实施例中,内部部件中的一个或多个内部部件可返回到其初始位置或指定的原位,如由操作420所表示的那样。作为一个示例,内部部件可返回到在操作406中绘制的在预定坐标系内的位置。
虽然以上描述了示例性实施例,但是这些实施例并不旨在描述权利要求所涵书盖的所有可能的形式。在说明书中使用的词汇是说明性而不是限制性的词汇,并且应当理解,能够在不偏离本公开的精神和范围的情况下作出各种改变。如前所述,能够组合各种实施例的特征,以形成本发明的尚未被明确描述和示出的另外的实施例。虽然各种实施例已经被描述为关于一个或多个期望特性相比于其它实施例或现有技术实施方式提供优点或是优选的,但是本领域技术人员认识到:为了实现期望的整体系统属性,可妥协牺牲一个或多个特征或特性,这取决于具体的应用和实施方式。这些属性可包括但不限于成本、强度、耐久性、生命周期成本、适销性、外观、包装、尺寸、可维护性、重量、可制造性、易于组装等等。这样,在一定程度上,关于一个或多个特性,任何实施例被描述为不如其它实施例或现有技术实施方式所期望的,但是这些实施例不落在本公开的范围之外并且可能对于特别的应用是期望的。
- 内部空气调节装置及包括该内部空气调节装置的集装箱用制冷装置
- 一种内部气流自调节型洁净系统及气流调节方法