车辆驾驶辅助系统
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及设置有被配置为显示车辆未来轨迹的显示单元的车辆驾驶辅助系统。
背景技术
已知出于辅助车辆操作者进行车辆转弯操纵的目的而显示车辆的预测轨迹。根据JP2013-228802A中提出的系统,在约30m的范围内的周围环境的图像由图像捕获单元捕获并被显示在显示单元上,并且根据转向信息预测的本车的未来轨迹被叠加在显示单元上的周围环境的图像上。该系统使车辆操作者能够确定车辆是否可以利用当前转向操作安全地进行掉头,并且辅助车辆操作者成功地进行掉头。
还已知将周围环境显示为可以通过合适地转换车辆周围环境的360度视图而获得的来自车辆正上方的视图或鸟瞰图。通过使用这样的鸟瞰图,使得车辆操作者能够以能容易理解的方式掌握周围环境,使得车辆可以向后移动,并且容易地在受约束区域中操纵。
在这样的车辆驾驶辅助系统中,如果转弯足够紧,则车辆的预测路径或轨迹可以用整圆来表示。然而,当该显示将整圆示为车辆的预测轨迹时,车辆操作者可能无法直观地将该显示理解为指示车辆的预测轨迹。屏幕上显示的整圆往往会与其它符号相混淆。
发明内容
鉴于现有技术的这种问题,本发明的主要目的是提供可以在所有条件下都辅助车辆操作者以适当的方式执行转弯操纵的车辆驾驶辅助系统。
为了实现此目的,本发明提供了一种车辆驾驶辅助系统(1),该车辆驾驶辅助系统(1)包括:外部环境获取单元(7),该外部环境获取单元(7)被配置为获取关于车辆(2)周围的外部环境的信息;显示单元(8),该显示单元(8)具有显示关于外部环境的信息的屏幕;转向状态获取单元(9),该转向状态获取单元(9)被配置为获取所述车辆的转向状态;以及图像处理单元(10),该图像处理单元(10)被配置为根据所述车辆的所述转向状态来确定所述车辆的预测轨迹(20),并且将所述预测轨迹叠加在所述屏幕上显示的关于所述外部环境的信息上,其中,在所述预测轨迹碰巧是整圆的情况下,所述图像处理单元去除待显示的所述轨迹的远端部分,以使其不与所述屏幕上的轨迹的起点连接。
由此,防止了屏幕上显示的轨迹变为整圆,使得车辆操作者可以利用由驾驶辅助系统提供的驾驶辅助,而没有被混乱的显示分心。
在该车辆驾驶辅助系统中,优选地,当所述车辆正在转弯时,所述屏幕上显示的所述车辆的所述预测轨迹包括指示所述车辆将扫过的区域的内边缘的内边缘线(21)和指示所述车辆将扫过的区域的外边缘的外边缘线。
由此,使得车辆驾驶员能够以直观方式确认车辆中任何部分都不会干扰外部物体或超出规定的极限。
在该车辆驾驶辅助系统中,优选地,在所述预测轨迹碰巧是整圆的情况下,所述图像处理单元被配置为将待显示在所述屏幕上的所述轨迹绘制为具有等于或大于180度但小于360度的中心角的圆扇形。
由此,当车辆操作者意图进行掉头时,可以将关于车辆用于掉头的预测轨迹的必要信息正确地传达给车辆操作者。
在该车辆驾驶辅助系统中,优选地,当所述车辆的所述预测轨迹超出所述屏幕的边缘并回到所述屏幕中时,所述图像处理单元去除待显示轨迹的回到所述屏幕中的部分。
由此,防止了轨迹的回到屏幕中的部分使车辆操作者混淆或分散注意力。
在该车辆驾驶辅助系统中,优选地,当所述内边缘线是整圆并且所述外边缘线是具有小于360度的中心角的圆扇形时,所述内边缘线和所述外边缘线在所述屏幕上被显示为具有相互不同的中心角的圆扇形。
由此,使得车辆操作者能够以直观的方式知道屏幕上显示的内边缘线和外边缘线表示车辆的相关部分的预测轨迹,使得车辆驾驶辅助系统的便利度可以增强。
在该车辆驾驶辅助系统中,优选地,显示的所述内边缘线的中心角大于所述外边缘线的中心角。
当在有限的空间内操纵车辆时,内边缘线通常比外边缘线更关键。因此,通过将内边缘线的中心角选择为大于外边缘线的中心角,允许车辆操作者将注意力集中在需要最大程度注意的道路上的禁止部分或外部物体上。
在该车辆驾驶辅助系统中,优选地,所述外部环境获取单元包括被配置为捕获所述车辆周围的所述外部环境的图像的图像捕获装置,并且所述图像处理单元被配置为将所述图像捕获装置获取的所述图像转换成将显示在所述屏幕上的鸟瞰图。
由此,使得车辆操作者能够具有从车辆正上方看到的车辆周围的360度视图,使得有助于在有限区域内操纵车辆和向后驾驶车辆。
在该车辆驾驶辅助系统中,优选地,所述图像处理单元(10)被配置为将所述车辆的所述预测轨迹表示为由所述内边缘线(21)、所述外边缘线(22)和前边缘线界定的带区域,所述前边缘线从所述内边缘线的远端正交地延伸。
由此,可以以能容易理解的方式显示车辆的预测行驶路径。
在该车辆驾驶辅助系统中,优选地,所述带区域由叠加在所述屏幕上的显示上的半透明带区域表示。
由此,可以以甚至更加容易理解的方式显示车辆的预测行驶路径。
因此,本发明提供了可以在所有条件下都辅助车辆操作者以适当的方式执行转弯操纵的车辆驾驶辅助系统。
附图说明
图1是根据本发明的第一实施方式的配备有驾驶辅助系统的车辆的功能框图;
图2是根据本发明的第一实施方式的当前轮的转向角相对小时触摸面板屏幕的例示性视图;
图3是根据现有技术的当前轮的转向角相对小时触摸面板屏幕的例示性视图;
图4是根据本发明的第一实施方式的当前轮的转向角相对大时触摸面板屏幕的例示性视图;
图5是根据现有技术的当前轮的转向角相对小时触摸面板屏幕的例示性视图;以及
图6是根据本发明的第二实施方式的与图4类似的视图。
具体实施方式
现在,下面将参照附图依据具体实施方式更详细地描述本发明。
(第一实施方式)
驾驶辅助系统1被安装在诸如汽车这样的车辆2(参见图2)上。车辆2是四轮车辆,并且包括用于驱动后轮3(驱动轮)的行驶电机(推进装置)和用于将前轮4(转向轮)转向的转向装置。
如图1中所示,驾驶辅助系统1包括:外部相机7,该外部相机7捕获车辆2的周围环境的图像;显示单元8,该显示单元8具有用于显示外部相机7捕获的车辆2的周围环境的图像的屏幕;转向角传感器9,该转向角传感器9用于检测前轮4的转向角;以及图像处理单元10,该图像处理单元10用于控制显示单元8的屏幕显示。
外部相机7是对车辆2的周围环境进行成像的图像捕获装置,并且例如是使用诸如CCD和CMOS这样的固态图像传感器的数字相机。外部相机7包括对车辆2的前方视图进行成像的前置相机7F、对车辆2的后方视图进行成像的后置相机7R以及对车辆的各个侧方视图进行成像的一对侧面相机7S。另选地,外部相机7可以由能够捕获车辆2周围的360度视图的单个全向相机组成。外部相机7将所捕获的车辆2的环境图像信息输出到图像处理单元10。
转向角传感器9可以直接检测前轮4的转向角,或者可以检测齿条齿轮装置的齿条位移或方向盘的角位置。转向角传感器9将检测到的前轮4的转向角输出到图像处理单元10。因此,转向角传感器9是获取车辆2的转向状态的转向状态获取单元。图像处理单元10通过接收来自转向角传感器9的输出或者通过基于从转向角传感器9接收的输出执行预定计算来获取前轮4的转向角。
显示单元8可以由导航装置的显示单元组成,并且被设置在车辆2的驾驶员容易看到的诸如仪表盘或仪表板这样的位置处。显示单元8可以具有由液晶或有机EL等组成的屏幕,并且可以是能够接受来自车辆操作者的输入操作的触摸面板,或者是不能接受输入操作的仅显示装置。由图像处理单元10控制显示单元8的屏幕显示。
显示单元8不限于固定到车辆2的显示单元,而是还可以能从车辆2拆卸,或者可以是由用户携带的便携式终端的显示单元。当显示单元8是与车辆2分开的终端时,可以由图像处理单元10例如经由基于Bluetooth(蓝牙)(注册商标)的无线通信来控制显示单元8。无线通信不限于此,而是还可以基于Wi-Fi(注册商标)或移动电话通信网络。另选地,可以由在合适的软件应用下操作的终端来执行图像处理单元10的部分或全部功能部分。通过以这种方式配置无线通信,诸如平板、智能电话和移动电话这样的通用通信装置可以至少用作显示单元8和图像处理单元10的一部分。
图像处理单元10是包括CPU、非易失性存储器(ROM)、易失性存储器(RAM)等的电子控制单元(ECU)。图像处理单元10通过用CPU根据规定的计算机程序执行算术处理来针对显示单元8执行各种屏幕显示控制。图像处理单元10可以被配置为一件硬件,或者可以被配置为由多件硬件构成的单元。
图像处理单元10包括图像生成器11。图像生成器11通过根据规定的计算机程序执行算术处理来转换外部相机7捕获的图像(视频图像),并且生成车辆2及其周围环境的鸟瞰图像。
这里,鸟瞰图像是与从正上方观察时本车的平面图和本车的周围区域对应的图像。鸟瞰图像还可以意指与从本车后面一定距离处从上方观察到的透视图对应的图像。在后一种情况下,鸟瞰图像由当车辆向前行驶时从本车后面(与行驶方向相反)的一定距离处从上方沿向下和向前方向观察到的视图以及当车辆向后行驶时从本车前面(与行驶方向相反)的一定距离处从上方沿向下和向后方向观察到的视图组成。可以根据车辆的行驶速度和/或车辆的动力传递的档位(档位、换档范围)来确定车辆向前还是向后行驶。
图像处理单元10可以通过组合前置相机7F、后置相机7R和侧面相机7S的图像或者另选地与侧面相机7S的图像相结合的取决于车辆正行驶的方向的前置相机7F或后置相机7R的图像来生成鸟瞰图像。
行驶方向上的前方视图也可以被显示在屏幕上。行驶方向是根据档位(换档范围)确定的。当档位为倒档时,从后置相机7R获得前视图像。当档位为诸如停车、空档、行驶等这样的其它档位时,从前置相机7F获得前视图像。
图像处理单元10还包括图像选择单元12、路线绘制单元13和图像合成单元14。图像选择单元12根据车辆2的状态,从所生成的鸟瞰图像以及外部相机7捕获的行驶方向上的前视图像中选择将被显示在显示单元8上的一个或更多个图像。路线绘制单元13基于由转向角传感器9检测到的前轮4的转向角来绘制车辆2的预测行驶路径20(参见图2)。图像合成单元14将预测行驶路径20叠加在鸟瞰图像和行驶方向上的前视图像上。另外,图像处理单元10具有显示控制单元15,显示控制单元15将由图像选择单元12选择并由图像合成单元14处理的一个或更多个图像显示在显示单元8的屏幕上。
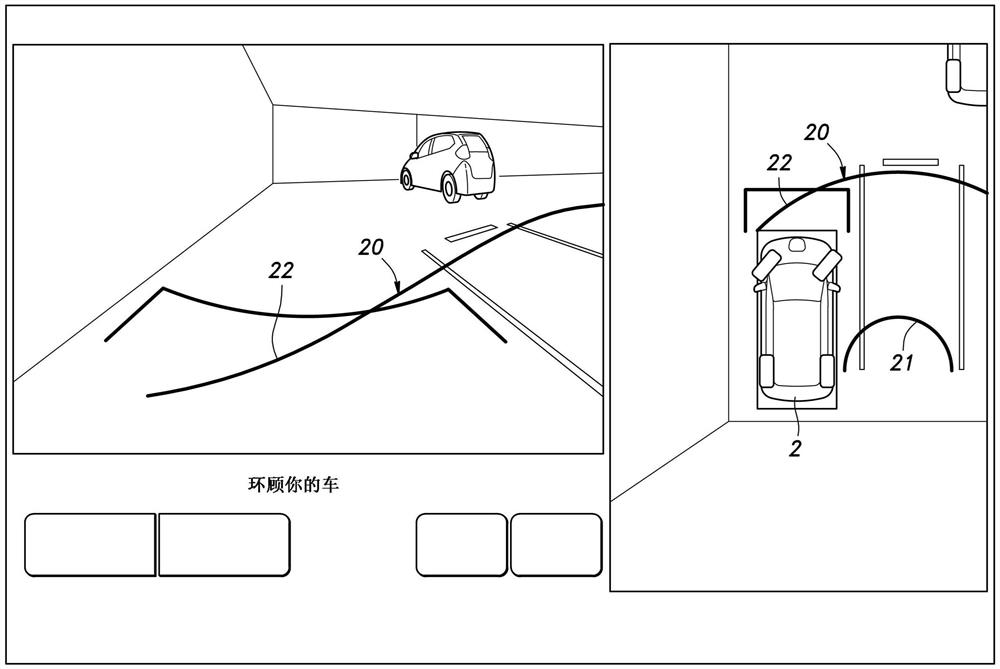
例如,当车辆操作者按下驾驶辅助开关时,图像处理单元10致使显示单元8显示如图2中所示的驾驶辅助屏幕。图2示出了当前轮4的转向角相对小时由触摸面板屏幕组成的显示单元8的屏幕。在该驾驶辅助屏幕上,鸟瞰图像被显示在屏幕的右侧,并且行驶方向上的前视图像被显示在屏幕的左侧。鸟瞰图像由车辆2及其周围的平面图组成,其中车辆的前端在屏幕上朝上。行驶方向上的前视图像在所例示的示例中是由具有广角镜头的前置相机7F捕获的图像。
图像处理单元10将行驶路径20叠加在驾驶辅助屏幕上的鸟瞰图像和前视图像中的每一个上。另外,图像处理单元10将基准线30显示在鸟瞰图像和行驶方向上的前视图像中的每一个上,使得车辆操作者可以理解鸟瞰图像与前视图像之间的对应性。基准线30包括:前后基准线31,该前后基准线31在距车辆2的前端规定的距离处在车辆2的前方横向延伸;以及一对横向基准线32,该一对横向基准线32各自从前后基准线31的任一横向端向后延伸规定的距离。前后基准线31的长度略大于车辆2的宽度,并且横向基准线32从前后基准线31的各端向后延伸。因此,基准线30在鸟瞰图像中具有矩形U形状,并且在前视图像中具有弯曲形状,以对应于由广角镜头在前视图像中引起的图像失真。
另选地,图像处理单元10可以将从车辆正上方向下观察到的鸟瞰图像显示在屏幕的右侧并且将从车辆上方并且略微在车辆后面的点向下观察到的鸟瞰图像显示在屏幕的左侧作为驾驶辅助屏幕。同样在这种情况下,图像处理单元10将预测行驶路径20和基准线30叠加在驾驶辅助屏幕上的两个鸟瞰图像上。
基于前轮4的转向角的行驶路径20在行驶方向上从车辆2延伸,并且弯曲成最终延伸回车辆2的圆形,除非转向角为0。当如图3所示这样的行驶路径20被显示在车辆2的前面和后面时,车辆操作者不能确定车辆2正向前还是向后行驶。因此,根据本发明,图像处理单元10仅显示行驶路径20的从起点(车辆2上或车辆2附近的点)延伸到屏幕边缘(用于显示图像的框架)的部分,并且去除了行驶路径的回到屏幕中并延伸回到车辆2的部分。
结果,如图2中所示,不仅行驶路径20的延伸超出屏幕边缘的远端部分而且行驶路径20的延伸回到屏幕中的远端部分没有被显示在屏幕上。因此,行驶路径20的显示得以简化,使得车辆操作者可以容易地辨别车辆2将要如何行驶。
在例示的实施方式中,行驶路径20由指示车辆2一侧的路径(内边缘线21)和车辆2另一侧的路径(外边缘线22)的一对线组成。因此,使得车辆操作者能够知道路面上的车辆2扫过(或占据)的区域。
行驶路径20的内边缘线21具有与位于后轮轴的延长线上的车辆2的转弯中心对应的中心,并且是穿过车辆2的后轮3或最内侧转弯点的弧形线。更具体地,行驶路径20的内边缘线21被设置成穿过转弯内侧的后轮3稍微内侧的点,以便防止由于车轮在车辆内侧的轨迹差异而导致在进行急转弯时撞到车辆内侧的物体或行人。
行驶路径20的外边缘线22具有与转弯中心重合的中心,并且被给定为由车辆的外前端绘制的弧形轨迹。更具体地,行驶路径20的外边缘线22被设置为穿过车辆的外前端的稍微外侧的点,以便防止在进行急转弯时撞到车辆外侧的物体或行人。
行驶路径20的内边缘线21和外边缘线22在从正上方看到的鸟瞰图屏幕中被绘制成弧形形状,并且在从车辆2向前观察到的前方视图中被绘制成(通过规定的坐标转换算法计算出的)变形的弧形形状。
当车辆2自主驾驶时,屏幕上的显示可以包括停止线,以指示当车辆在指定地点(通常是停车位)停车时车辆2的前端(当车辆向前行驶时)或后端(当车辆向后行驶时)的位置。在这种情况下,内边缘线21和外边缘线22仅需要延伸到停止线,使得行驶路径20的延伸超过停止线的部分可以从显示上省略或去除。
如以上讨论的,图像处理单元10根据前轮4的转向角在显示上绘制车辆2的行驶路径20,并且将所绘制的行驶路径20叠加在显示单元8的驾驶辅助屏幕上的车辆2周围的鸟瞰图像(或前方视图)上。结果,车辆操作者可以一眼从显示单元8的屏幕获得车辆2周围的360度视图,并且可以容易地确定行驶路径20上是否存在任何障碍物。因此,有助于在有限的空间中操纵车辆2或者向后驾驶车辆2。
随着车辆2的轴距减小,车辆2的行驶路径20的半径变小,并且前轮4的转向角增大。另外,行驶路径20的内边缘线21的半径比行驶路径20的外边缘线22的半径小至少车辆宽度。因此,车辆2的轴距越短,并且前轮4的最大转向角越大,则行驶路径2的内边缘线21变为适合在鸟瞰图像的屏幕内(不超过鸟瞰图像的屏幕的边缘)的圆形的可能性越大,如图4中所示。
在这种情况下,或者当行驶路径20的内边缘线21在显示单元8的屏幕上被显示为车辆2内侧的整圆时,乘员可能将该圆圈与符号、按钮等相混淆。车辆操作者有可能认识到该圆圈指示行驶路径20的内边缘线21,而不是正确地将该圆圈标识为指示内边缘线21。
基于这样的考虑,图像处理单元10被配置为使得行驶路径20的内边缘线21的远端部分不连接到内边缘线21的起点(内后轮3),如图5中所示。更具体地,行驶路径20的内边缘线21被绘制为具有180度中心角的圆扇形,并且从显示单元8的驾驶辅助屏幕上的显示中去除整圆的其余部分。该中心角可以是小于360度的任何角度。该中心角优选地等于或大于180度,并且更优选地在180度和270度之间。
因此,当将在鸟瞰图像上显示和叠加的行驶路径20的内边缘线21变为整圆(参见图4)时,图像处理单元10去除行驶路径20的内边缘线21的远端部分以成为具有小于360度的中心角的圆扇形,使得内边缘线21的远端部分不连接到内边缘线21的起点(参见图5)。这使得车辆操作者更容易认识到圆扇区指示预测行驶路径20。因此,车辆操作者可以容易地根据显示单元8的屏幕确定车辆2的预测行驶路径20以及与预测行驶路径20相邻的区域的状况。
特别地,当车辆操作正尝试掉头时,由于图像处理单元10已经将车辆2的预测行驶路径20绘制为具有可以稍微大于180度但远小于360度的中心角的圆扇形的事实,车辆操作者可以以直观的方式容易地识别出预计的掉头期间以及完成时车辆2的预测位置。
当所预测的外边缘线22的远端部分超出显示单元8的屏幕的边缘时(如图3中所示),自然不显示远端部分。根据例示的实施方式,所预测的外边缘线22的返回到显示单元8的屏幕中的远端部分(否则连接到起点)被去除,并且不被显示(如图2中所示)。由此,使得车辆操作者能够没有任何混淆地认识到外边缘线22指示车辆2的行驶路径20。此外,以这种方式显示的所预测的外边缘线22使车辆操作者能够没有任何混淆地确定车辆正在哪个方向上行驶。
行驶路径20的内边缘线21和外边缘线22具有共同的中心,该中心与位于车辆2的后轮轴延长线上的车辆2的转弯中心重合。换句话说,外边缘线22超出鸟瞰图像的屏幕的边缘的点位于后轮轴延长线的前方,并且是具有小于180度的中心角的圆扇形。如果内边缘线21的远端部分超出鸟瞰图像的屏幕的边缘,则内边缘线21同样如此。如果内边缘线21没有超出鸟瞰图像的屏幕的边缘,则行驶路径20的内边缘线21被绘制为具有180度或更大中心角的弧扇形。
在例示的实施方式中,具有内边缘线21和外边缘线22的车辆的预测行驶路径20被表示为具有互不相同的中心角的圆扇形。由此,使得车辆操作者能够以清晰的方式辨别内边缘线21和外边缘线22指示车辆2的预测行驶路径20,使得驾驶辅助系统1的便利度可以增强。
在这种情况下,图像处理单元10以内边缘线21的中心角大于外边缘线22的中心角这样的方式绘制预测行驶路径20。结果,尤其需要车辆操作者注意的行驶路径20的内边缘被示出为比行驶路径20的外边缘大的中心角的弧形,使得车辆操作者能够更容易地避开可能存在的任何障碍物。
(第二实施方式)
图6是根据本发明的第二实施方式的驾驶员辅助系统的触摸面板屏幕。这示出了前轮4的转向角相对大的示例。同样在该实施方式中,车辆2的行驶路径20由带表示,该带具有指示转弯时车辆2内侧的轨迹的内边缘线23和指示转弯时车辆2外侧的轨迹的外边缘线24。用带表示的行驶路径20被显示为鸟瞰图像或行驶方向上的前视图像上的半透明区域,使得路径上的障碍物和其它物体可以被识别到。
在这种情况下,如图中6所示,叠加在鸟瞰图像上的行驶路径20的内边缘线23变为半圆形,并且行驶路径20的外边缘线24延伸至屏幕的侧边缘。表示行驶路径20的半透明区域的远端由与内边缘线23正交的前边缘线25界定。前边缘线25可以被视为完成180度转弯时车辆2的后轴的位置。如之前提到的,由内边缘线23限定的圆扇区的中心角不限于180度,而是可以小于或大于180度,只要远小于360度即可。在屏幕左手侧示出的前视图中,行驶路径20由用变形线界定的区域表示。
通过将行驶路径20显示为由内边缘线23、外边缘线24和前边缘线25(在鸟瞰图像中)界定的带区域,车辆2的预测行驶路径20可以以能容易理解的方式显示。该带可以是叠加在屏幕上的显示上的实心带区域或不透明带区域,但优选地是叠加在屏幕上的显示上的半透明带区域以改善对周围区域的理解。
已经依据特定实施方式描述了本发明,但是本发明不受这些实施方式限制,而是可以在不脱离本发明的范围的情况下以各种方式进行修改。
例如,外部相机7可以由使用电磁波、声波和诸如声呐、雷达和激光雷达这样的激光的任何其它外部环境传感器组成。
声呐是超声波传感器,其发射超声波并通过分析被物体反射的超声波来检测物体的位置(距离和方向)。毫米波雷达发射毫米波电磁波并通过分析被物体反射的毫米波电磁波来检测物体的位置(距离和方向)。激光雷达发射激光束并通过分析被物体反射的激光来检测物体的位置(距离和方向)。这样的传感器可以被设置在车辆2的前部、后部和侧部上。
由这样的传感器检测到的物体可以以车辆操作者能理解被检测物体的位置的方式被显示在显示单元8上。通常,使用坐标转换算法将从外部环境传感器获得的图像数据转换成鸟瞰图。在前方视图显示的情况下,所获得的图像数据可以被直接显示在屏幕上。图像处理单元10可以通过将行驶路径20叠加在鸟瞰图像、前方视图等上来将行驶路径20显示在显示单元8上,以便车辆操作者清楚地理解车辆2的未来轨迹。
- 用于车辆的驾驶辅助系统、带驾驶辅助系统的车辆和用于车辆的驾驶辅助方法
- 车辆驾驶辅助系统、方法和带车辆驾驶辅助系统的车辆