一种摆线轮齿廓设计方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明属于齿轮齿廓设计相关技术领域,更具体地,涉及一种摆线轮齿廓设计方法。
背景技术
RV减速器广泛应用于高传输精度,大扭矩,高负载条件,由于采用行星传动结构,减速器结构紧凑、体积小、重量轻,同时采用两片式180°分布摆线针轮针齿同时啮合结构,从理论上讲,对于单片摆线轮而言,有一半的齿同时参与啮合,使得系统运行平稳,噪音低,抗冲击性强,另外啮合过程的接触部分是滚动摩擦,减缓了磨损,因此RV减速器具有使用寿命长的优点。
摆线针轮传动系统作为RV减速器的核心部件,摆线轮齿廓的设计精度将直接影响传动精度和啮合特性,在传统的设计过程中,仅仅是粗略地通过更改针齿分布圆的直径(偏移修改)或针齿直径的大小(等距修改)或更改固定在摆线的中心位置初始角度(角度旋转修改)获得修改后的摆线轮轮廓,而后进行误差计算,因此齿廓设计和误差研究是两个相对独立的过程,轮廓设计不能预测可能的误差也不能补偿可能出现的修形量,同时现有的设计采用二维设计域,所以其考虑的误差也仅仅是整合齿廓和节圆误差,而针齿窜动误差存在于三维空间,摆线轮针齿的数量众多,针齿窜动误差对摆线轮的稳定性影响很大,现有的设计方法并不能表征该误差,因此,亟需设计一种新的摆线轮齿廓设计方法。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供了一种摆线轮齿廓设计方法,在三维空间中对齿轮轮廓进行设计因此可以考虑针齿轴向窜动误差,设计的齿轮齿廓更加稳定,性能更好。
为实现上述目的,按照本发明的一个方面,提供了一种摆线轮齿廓设计方法,所述方法包括:S1:将XYZ坐标轴绕z轴旋转第一预设角度;S2:将旋转后的坐标轴沿其x轴移动偏心距的距离而后旋转第二角度,其中,所述偏心距为所述针齿分布节圆圆心与所述节圆圆心间的距离,所述第二角度为偏心距自由端与摆线轮啮合的针齿中心连线的转角;S3:将步骤S2旋转后的坐标轴沿其x轴移动针齿分布圆半径距离同时沿z轴移动针齿轴向窜动误差的距离,而后旋转第三角度,所述第三角度为所述针齿的中心与偏心距自由端以及针齿分布节圆瞬时速度中心的连线之间的夹角;S4:将步骤S3旋转后的坐标轴沿其X轴移动针齿半径的距离得到点即为所述齿轮轮廓上的点,选取多个所述第一预设角度获取多个点即组成所述齿轮轮廓。
优选地,采用对偶四元数形式表示所述旋转角度和移动距离。
优选地,步骤S2对应的对偶四元数为R_1为:
其中,α=-π+φ
优选地,步骤S3中移动所述偏心距的距离对应的对偶四元数为T_1,所述旋转第二角度对应的对偶四元数为R_2:
其中,e为偏心距,β=π-φ
优选地,步骤S4中移动所述针齿分布圆半径距离对应的对偶四元数为同时沿z轴移动针齿轴向窜动误差的距离T_2,所述旋转第三角度对应的对偶四元数为R_3:
其中,R
优选地,步骤S5中所述齿轮轮廓的计算方程为:
其中,x为所述齿轮轮廓的横坐标,y为所述齿轮轮廓的纵坐标,z
优选地,采用如下公式获得所述齿轮齿廓的计算方程:
其中,q为对偶四元数坐标变换矩阵,q
总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的一种齿轮齿廓设计方法具有如下有益效果:
1.本申请在三维空间中对齿轮齿廓进行设计,将针齿的轴向窜动误差考虑其中进行设计,因此在设计摆线轮齿廓的同时对于针齿和针齿壳轴向配合进行了考虑,齿廓更加准确的同时,提高了传动的稳定性和准确性。
2.使用双四元数空间中点集的移动来引入运动误差,设计过程简单清晰,设计步骤简单,极大的简化了计算量。
3.此设计方法中具体为考虑针齿轴向窜动误差的前提下,摆线轮齿廓的设计过程,但并不局限于针齿,对于动态过程中,角度或位移量的误差引入均可采用相同的思想,诸如摆线轮转动迟滞角的引入等,普适性强。。
附图说明
图1示意性示出了本实施例的摆线轮安装位置示意图;
图2示意性示出了本实施例的摆线轮齿廓成形原理图;
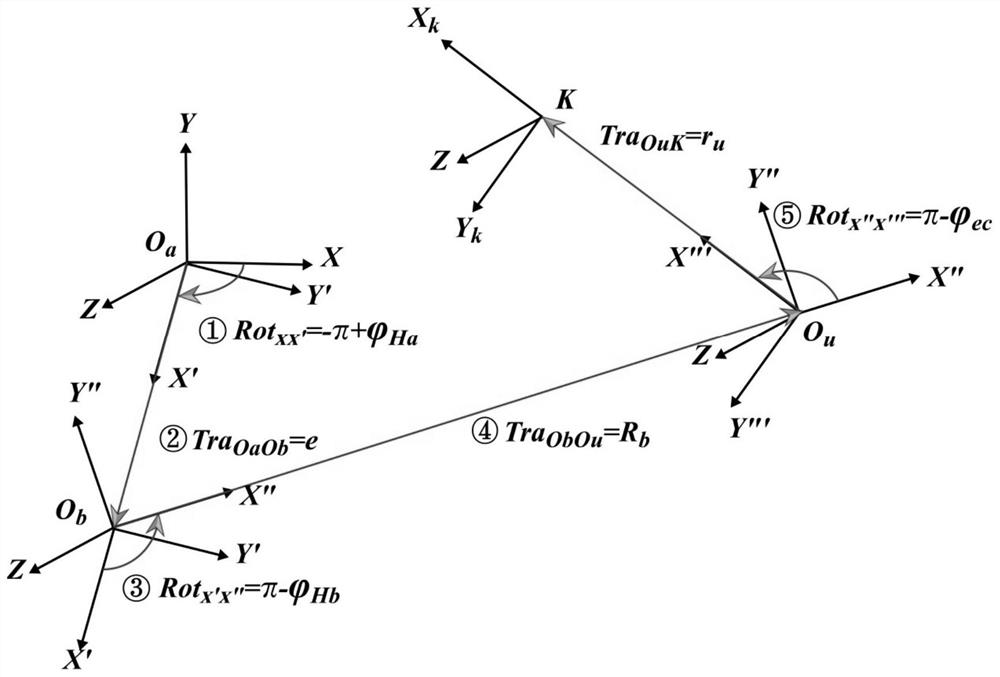
图3示意性示出了本实施例的摆线轮齿廓的动点坐标变换过程示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
本发明提供了一种摆线轮齿廓设计方法,如图1所示,本实施例中摆线轮包括摆线轮盘1,针齿2,输入曲柄3,行星齿4,太阳轮5。摆线轮齿廓是指一动圆绕固定圆作纯滚动运动时,滚动圆中某点的轨迹。如图2所示,固体过程如下,在固定的矩形坐标系XO
本实施例在对偶四元数空间中对该摆线轮齿廓进行设计,设计过程主包括如下步骤S1~S5。
S1:将XYZ坐标轴绕z轴旋转第一预设角度。
建立XYZ坐标轴,然后绕Z轴(即向量
其中,φ
S2:将旋转后的坐标轴沿其x轴移动所述偏心距的距离而后旋转第二角度,其中,所述偏心距为所述针齿分布节圆圆心与所述节圆圆心间的距离,所述第二角度为偏心距自由端与摆线轮啮合的针齿中心连线的转角;
然后将旋转后的坐标轴沿其x轴(即向量
而后绕z轴顺时针旋转第二角度得到坐标轴X”Y”Z,即图3中的Rot
其中,β=π-φ
其中,所述偏心距为所述针齿分布节圆圆心与所述节圆圆心间的距离,所述第二角度为偏心距自由端与摆线轮啮合的针齿中心连线的转角;
S3:将步骤S2旋转后的坐标轴沿其x轴移动针齿分布圆半径距离同时沿z轴移动针齿轴向窜动误差的距离,而后旋转第三角度,所述第三角度为所述针齿的中心与偏心距自由端以及针齿分布节圆瞬时速度中心的连线之间的夹角;
将X”Y”Z坐标轴移动针齿分布圆半径距离,即图3中的Tra
然后绕z轴旋转第三角度,得到X”’Y”’Z,该过程对应的对偶四元数为R_3:
其中,R
S4:将步骤S3旋转后的坐标轴沿其X轴移动针齿半径的距离得到点即为所述齿轮齿廓上的点,选取多个所述第一预设角度获取多个点即组成所述齿轮齿廓。
将坐标系X”’Y”’Z中的点K(ru,0,0)写成对偶四元数的形式,即p(1,0,0,0,ru,0,0),可以通过对偶四元数的乘法进行坐标转化求解,公式如下:
其中,q为对偶四元数坐标变换矩阵,q
现有技术中,通过反转法和速度瞬心法建立的齿廓方程分别为:
反转法齿廓模型:
速度瞬心法建立的齿廓模型:
三种模型计算效率如下表1所示。
表1
可以看出本申请中的方法建立的齿廓方程计算效率得到明显提升。
综上所述,本发明提供了一种摆线轮齿廓设计方法,在三维空间中对齿轮齿廓进行设计因此可以考虑针齿轴向窜动误差,设计的齿轮齿廓更加稳定,性能更好。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种摆线外环内齿廓的设计方法、摆线外环和摆线减速机
- 一种基于齿廓法线法的摆线轮齿廓通用方程设计方法