地面加工方法和用于实施该方法的地面加工机
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及用于借助围绕作业轴线旋转的工具剥除地面材料的地面加工方法,其中,旋转工具通过地面加工机的机架承载,其中,机架通过可滚动的行驶机构站立在地面上并且通过进给驱动装置驱动而相对于地面沿着进给方向进行进给运动。地面加工机的进给运动在此如在本发明中那样用于旋转工具的推进运动。
本发明还涉及一种用于实施上述地面加工方法的地面加工机,例如铣路机、回收机、稳定机或露天采矿机。
背景技术
开头所述的地面加工方法由现有技术已知。尤其构造成铣路机、回收机、稳定机或各种露天采矿机的地面加工机用于按规定剥除地面材料。在现有技术中,关于上述地面加工方法和用于执行地面加工方法的呈铣路机形式的地面加工机仅示例性地且作为代表地参见提到的几个文献DE 10 2005 035 480 A1、DE 10 2016 003 895 A1或WO 03/100172A。通常,在已知的铣路机直线行驶时其进给方向与工具的作业轴线正交,该进给方向是旋转工具的推进方向。主要通过布置在围绕作业轴线环绕的外侧面上的铣刀剥除地面材料。
如在也涉及铣路机的DE 10 2010 013 983 A1中详细描述地,与承载铣刀的外侧面磨损相比,用于剥除的旋转工具的端侧经受高出平均水平的高度磨损。这一部分是,由于在铣削滚轮作为工具的上述文献的情况下,工具的端侧比位于端侧之间的外侧面更多地接触待剥除或已经剥除的地面材料,位于端侧之间的外侧面由于位于其上的铣刀比端侧更大程度地受到保护而防止与地面材料接触。另一部分原因是,旋转工具的端侧平行于地面加工机的进给方向以及工具的进给方向,因此例如由工具本身产生的铣削棱边在地面中可在发挥强大的剥除作用的情况下与端侧接触地沿着该端侧滑动。
为了克服这种端侧磨损,DE 10 2010 013 983 A1由此提出,在铣削滚轮的端侧也设置铣刀,由此使得工具或铣削滚轮之外的沿轴向与端侧相邻的区域通过铣刀来清除。该方案不利的是,这种具有端侧的铣刀的铣削滚轮在维护过程中重复进行的制造和安装非常麻烦。一方面必须将附加的铣刀安装在铣削滚轮上,另一方面铣刀在端侧比在外侧面更难稳定地安装,不同于在端侧上,在外侧面上为每个铣刀提供相对大的表面区域进行安装。
发明内容
因此本发明的目的是,提供一种技术教导,该技术教导使得借助旋转工具无需额外的用于制造和安装工具的工作就可限定地剥除地面材料,并且同时降低、甚至避免上述在侧面的对剥除工具的高度磨损。
本发明通过开头所述的剥除地面的地面加工方法以如下方式实现该目的,即,机架以及具有旋转工具的地面加工机的进给方向以及旋转工具的推进方向在剥除的地面加工期间与作业轴线围成与90°不同的角。
通过在剥除地面材料时使作业轴线以及旋转工具相对于地面加工机的进给运动如此定向,能够使工具的关于作业轴线的轴向的纵向端部形成沿进给方向在后纵向端部,使得在后纵向端部基本上沿进给方向在工具的剥除阴影中运动,使得该在后纵向端部在工具按规定进行地面加工期间在通过旋转工具的用于剥除的切割器具在地面中清除的体积区域之内运动,因此不与地面材料或仅非常有限地与地面材料接触。因此,旋转工具的在后纵向端部的端侧以与进给方向相对于与作业轴线正交的平面所倾斜相同的角、从加工地面中的通过工具产生的剥除棱边转动离开。
因此地面材料不能或几乎不能对在后纵向端部有侵蚀作用。因此在后纵向端部的磨损负荷很小,使得可取消在工具的端侧上布置切割器具,例如铣刀。因此可借助传统的旋转工具在没有特别保护随后的端侧的情况下执行剥除地面的方法。
上述相对于进给方向设置的工具除了在后纵向端部以外也可具有在前纵向端部,由于工具的设置对于该在前纵向端部磨损情况产生不利的变化。但是这不是设置的工具的在前纵向端部的强制性运行条件,因为在前纵向端部不是必须与待加工的地面进行剥除接合。因此根据此处描述的地面加工方法的优选改进方案,旋转工具关于作业轴线在两个轴向的纵向端部之间延伸,其中,该工具基于作业轴线在进给方向上的定向具有轴向的在前纵向端部和轴向的在后纵向端部,其中,如此选择轴向的剥除宽度,使得在后纵向端部与待剥除的地面材料处于剥除接合,但是在前纵向端部没有处于剥除接合。
因为通常待剥除的地面比剥除宽度、即使是旋转工具的可能的最大剥除宽度更宽,待剥除的地面在几乎所有加工情况下都是在多条平行轨道上进行剥除,依次地驶过轨道。因此能简单地为待剥除的第二轨道和每个接续的轨道将在前纵向端部设置在已经产生剥除棱边的已经加工的一侧上,并且仅将旋转工具的关于作业轴线轴向的区段与地面形成剥除接合,该区段仅包含在后纵向端部。因此在前纵向端部与待剥除的地面脱离接合,并且在后纵向端部带有角间距地远离在相应加工期间产生的剥除棱边地布置。
正确的是,相比于进给方向与作业轴线正交地进行剥除的地面加工,通过使作业轴线相对于地面加工机的进给方向倾斜设置,降低了工具能实现的最大剥除宽度。能实现的最大剥除宽度的百分比损失相应于值1减去偏角的余弦值,进给方向相对于与作业轴线正交的平面倾斜该偏角。因此能实现的最大剥除宽度的百分比损失在偏角为15°时小于3.5%,并且在偏角为10°时稍微大于1.5%。因此优选地,偏角为15°或更小,特别优选地为10°或更小。最优选地,偏角为5°或更小,例如在5°和3°之间,但是大于0°。在偏角为5°时就实现了旋转工具的在后纵向端部上的显著磨损降低,但是能实现的最大作业宽度的百分比损失小于0.4%。相对于旋转工具上的能实现的显著磨损降低,提及的可能的最大作业宽度的损失实际上可忽略不计。
此时原则上能将具有这样的作业轴线的旋转工具布置在地面加工机的机架上,该作业轴线相对于通过地面加工机的平行于机架纵向方向延伸的侧倾轴线(Rollachse)和平行于机械高度方向延伸的偏航轴线展开的参考平面倾斜该偏角。然后地面加工机在剥除地面加工期间可简单地沿着其侧倾轴线直线运动,其中,基于工具的倾斜布置出于结构原因,在后纵向端部远离剥除棱边布置。该非常简单且对于机械驾驶员不复杂的加工方法克服了以下缺点:通常在地面剥除的第一条轨道中在前纵向端部也与待剥除的地面处于剥除接合,因此在该第一条轨道期间承受较高的磨损负荷。这可根据本发明的有利改进方案通过以下方式来防止,即行驶机构具有多个能够偏转的、能在地面上滚动的行走机构,其中,该地面加工方法包括使行走机构偏转,使得在地面加工机直线行驶时进给方向与平行于机架纵向方向延伸的侧倾轴线包围一个角。作业轴线此时可相对于参考平面具有固定的角度定向,优选与参考平面正交。
地面加工机通常都具有可偏转的且能在地面上滚动的行走机构。但是由于通过相应地偏转行走机构实现的偏角,可以传统方式在没有相对于进给方向倾斜设置的作业轴线、即具有与参考平面正交的作业轴线的情况下进行第一轨道剥除地面加工,其中,在第一轨道期间地面加工机的进给方向平行于侧倾轴线延伸,使得地面加工机的进给方向以及旋转工具的进给方向与其作业轴线正交。
在经过第一轨道之后在剥除的第一轨道和还未剥除的、但是还需要剥除的剩余地面之间产生剥除棱边作为边界构型,使得通过行走机构相对于进给方向的相应偏转或偏转设置而倾斜的作业轴线并且在对工具的在前纵向端部没有加工干预的情况下经过第二条轨道和其他每条轨道。
通过最后所述的经由使行走机构相应偏转产生上述进给运动的类型,使得机械纵向方向或地面加工机的侧倾轴线在地面加工期间以偏角的角度相对于待加工的地面、例如待剥除的轨道的纵向方向偏离。这甚至能够适用于弯曲轨道走向的待剥除轨道。在传统的地面加工期间,通常地面加工机的侧倾轴线平行于地面加工机位置上的弯曲轨道走向处的局部切线,根据此处描述的地面加工方法,即使在轨道走向弯曲时在地面加工期间侧倾轴线也与地面加工机沿着加工轨道在相应加工位置上的弯曲轨道走向处的局部切线有角度偏差,而通常偏差为偏角。
本发明还涉及剥除地面的移动式地面加工机,其包括站立在地面上的行驶机构,行驶机构包括多个可偏转的、能在地面上滚动的行走机构,其中,行驶机构支撑机架,机架承载具有能围绕作业轴线旋转的剥除地面的工具的作业装置,其中,作业轴线相对于上述参考平面以恒定的角度定向布置,参考平面通过地面加工机的平行于机架纵向方向延伸的侧倾轴线和平行于机械高度方向延伸的偏航轴线展开。地面加工机具有作业驱动装置,用于驱动工具围绕作业轴线旋转,并且地面加工机具有进给驱动装置,用于驱动地面加工机相对于其所站立的地面进行进给运动。地面加工机还具有偏转装置,用于使多个可偏转的行走机构相对于参考平面的偏转角改变。
本发明也通过以下方式实现开头所述的目的,即移动式地面加工机用于实施剥除的地面加工方法,该方法如上所述和改进。关于通过实施上述地面加工方法的地面加工机能实现的技术优点参考对地面加工方法的描述。根据本发明的地面加工机的改进方案参考结合地面加工方法描述所公开的地面加工机的设计方案和改进方案。根据本发明的地面加工方法的改进方案同样参考结合根据本发明的地面加工机描述所公开的地面加工方法的改进方案。
用于实施根据本发明的地面加工方法的地面加工机的构成可通过地面加工机的控制装置来实现。控制装置可包括一个或多个集成电路和数据存储器,例如构造成车载计算机或可编程的控制器。控制装置可构造成基于存储在数据存储器中的运行程序自动地操控机械执行上述地面加工方法。控制装置为此可至少将控制命令输出给偏转装置。在控制装置的数据存储器中可存储预设的偏角。此外可将多个不同的偏角分别与至少一个运行或作业参数对应地存储在数据存储器中,例如与剥除深度或/和与进给速度或/和与待剥除的地面材料类型相关地、并且与先前或/和刚刚进行的地面加工的加工参数相关地选择合适的偏角。也可在输入为此所需的加工参数之后通过控制装置自动地选择。
如上面结合根据本发明的地面加工方法所述,地面加工机优选构造成在作业装置的剥除地面的作业运行期间沿着进给方向直线行驶,进给方向与平行于偏航轴线延伸且包含作业轴线的作业平面围成与90°不同的角。在此为了清楚始终使用多个可知道的、在进给方向和作业平面之间围成的角中的最小的角作为围成的角。上述偏角是进给方向与参考平面围成的角,也是通过与偏航轴线平行且沿进给方向延伸的进给平面与作业平面形成的两个角与直角偏差的角度。此处重要的较小的角相对于直角减小了偏角的数值,在进给平面和作业平面之间的第二较大的角相对于直角增加了偏角的数值。
能滚动的行走机构作为轮式行走机构可具有车轮,或/和作为链式行走机构可具有环绕的链条。也可想到在一个并且同一个地面加工机上混合布置结构不同的行走机构,例如在地面加工机的前部的纵向端部上布置由轮式行走机构和链式行走机构组成的结构类型的行走机构,并且在后部的纵向端部上布置相应另一结构类型的行走机构。
如结合加工方法所述地,原则上也可使旋转工具固定在机架上,使得旋转工具的作业轴线位于作业平面中,作业平面相对于与参考平面正交的、包含偏航轴线的平面以偏角转动。然后可轨道式地以进给方向剥除待加工的地面,进给方向位于参考平面中(或相同地平行于参考平面)。
但是可通过以下方式实现可能的地面加工的较大的带宽,即,作业轴线与参考平面正交地布置,并且偏转装置构造成多个可偏转的行走机构以相应的偏转角定向,使得地面加工机在直线行驶时的进给方向与侧倾轴线围成一个角。与侧倾轴线围成的角是上述偏角。经由偏转装置使旋转工具倾斜设置的优点是,首先无需改变已知地面加工机的基础结构;因为其中旋转工具的作业轴线通常固定为相对于参考平面正交。其次优点是,通过相应地设置偏转装置,借助具有与参考平面正交的作业轴线的地面加工机能以传统方式以相对于作业轴线正交的进给方向,即以与0°不同的偏角并且以此处提及的特殊方式与0°不同的偏角以及借助在后纵向端部进行作业,使得在后纵向端部的端侧在剥除的地面加工期间在直线行驶时以偏角的角度与产生的剥除棱边间隔开,因此几乎无接触地布置。
原则上也可想到的是,地面加工机的行驶机构轴线仅由唯一的行走机构形成。但是为了使地面加工机尽可能稳固地站立在地面上设置至少一个行驶机构轴线,优选由沿着侧倾轴线在基本上共同的轴向位置上、但是在参考平面的不同侧上的两个行走机构形成的至少两个行驶机构轴线。为了使地面加工机尽可能无滑移以及低磨损地偏转优选地设置成,使得一个共同的行驶机构轴线的至少两个行走机构通过转向横拉杆彼此连接以共同地偏转运动。因此例如地面加工机能够在保持阿克曼(Ackermann)条件的情况下实现偏转。为了在转向杆或/和转向驱动器实施根据本发明的地面加工方法的所述优选的设计方案中避免在一个行驶机构轴线的一个或两个行走机构上的横向滑移,转向横拉杆可构造成长度可变。因此在使用转向横拉杆时,横向滑移造成在实施根据本发明的地面加工方法时一个行驶机构轴线的行走机构的偏转角不为0°,其中,转向横拉杆的使用使得曲线内部的行走机构的偏转角在数值上大于曲线外部的行走机构的偏转角。如果通过这种偏转设置尝试直线行驶,基于数值不同的偏转角会在一个并且同一个行驶机构轴线上出现横向滑移。
转向横拉杆的长度可变性能通过活塞-缸-组件实现,其中的活塞与一个行走机构耦联,并且其中的缸与同一行驶机构轴线的相应另一行走机构耦联。活塞-缸-组件可为转向横拉杆的一部分或可跨越两件式的、尤其可伸缩的转向横拉杆的分隔部位。替代地,转向横拉杆可通过螺杆传动设计成长度可变。为此也需要至少两件式的转向横拉杆,其两个部分沿着转向横拉杆纵向方向相对彼此可移位。
除了或替代防止由于长度可变的转向横拉杆引起的横向滑移,横向滑移也能通过以下方式减小、甚至避免,一个共同的行驶机构轴线的至少两个行走机构通过转向横拉杆彼此连接以共同地转向运动,其中,转向横拉杆的每个纵向端部分别通过转向杆与同一行驶机构轴线的相应另一行走机构连接,其中,转向杆能相对于承载其的行走机构围绕平行于偏航轴线的校正轴线转动。因此传递偏转运动的转向杆可相对于承载其的行走机构围绕校正轴线转动,使得能够以这种方式确保,尽管有转向冲击,一个共同的行驶机构轴线的两个通过转向横拉杆耦联的行走机构具有数值相同的转向角。
优选地,将相应的偏角所需的、用于校正运动的、用于设计为长度可变的转向横拉杆的长度变化或/和设计成转向杆围绕校正轴线的转动的数值存储在控制装置的数据存储器中。控制装置优选用于操控引起相应校正运动的致动器。但是因为如上所述偏角通常数值很小,优选小于15°、甚至小于10°,由此产生的少量横向滑移也可轻松承受。
如对于此处提及的地面加工机来说常见的是,优选机架能高度调节地支承在行驶机构上。由此可以简单的方式通过移动机架的高度以及相对于机架通常固定的作业轴线的高度,调节工具的剥除深度,即工具作用到剥除地面中的深度。优选地,行驶机构的单个或所有行走机构经由已知的升降柱与机架连接,由此实现机架的高度可调节性。
优选地,该工具是铣削滚轮,铣削滚轮至少在其以径向间距围绕作业轴线环绕的外侧面上具有铣刀。为了简单地将已经剥除的地面材料从铣削滚轮排走,在外侧面上螺旋状地布置铣刀。因为铣刀由于其与通常矿物表面、例如道路表面接合而经受严重的磨损应力,铣刀优选在所述铣刀更换支架中布置在作为铣削滚轮的基体的铣削滚筒上,由此简化铣刀在达到其磨损极限时的更换。
如上所述,地面加工机构造用于实施上述地面加工方法不表示或不一定表示地面加工机仅实施上述地面加工方法。对于剥除多条平行的剥除轨道中的第一轨道有利的是,地面加工机也构造成,在作业装置的剥除地面的作业运行期间沿着进给方向直线行驶,进给方向与作业平面正交。为了实现这些,优选偏转装置也构造成多个可偏转的行走机构以相应的偏转角定向,使得地面加工机在直线行驶时的进给方向平行于侧倾轴线。
因为此处提及的地面加工机优选是铣路机,尤其、但是不仅仅是具有布置在前部的行驶机构轴线的行走机构和后部的行驶机构轴线的行走机构之间的铣削滚轮作为旋转工具的大型铣路机、回收机、稳定机或露天采矿机。
附图说明
下面根据附图详细阐述本发明。其中示出:
图1示出了根据本发明的地面加工机在剥除传统地面材料的加工期间的粗略侧视图,以及
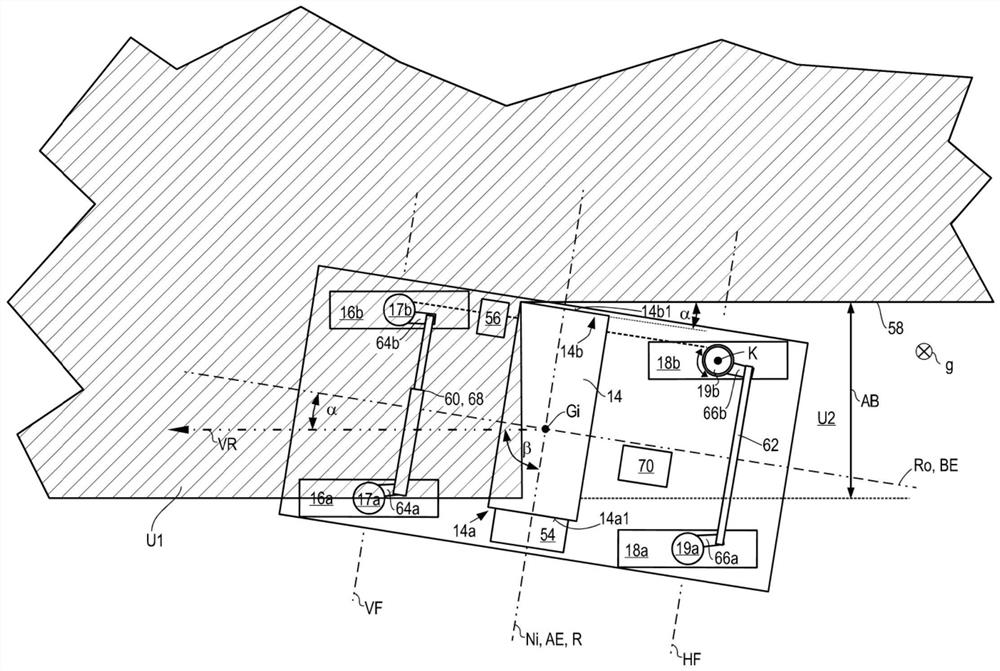
图2示出了图1的根据本发明的地面加工机依照根据本发明的地面加工方法的标准在剥除地面材料的加工期间的粗略俯视图。
具体实施方式
在图1和图2中概括性地用10表示根据本发明的地面加工机(下面简称“机械”)。根据本发明的机械10示例性地呈现为大型铣路机,大型铣路机的作业装置12以已知的铣削滚轮14布置在前部的行走机构16a和16b和后部的行走机构18a和18b之间,铣削滚轮作为剥除地面的能转动的工具对于大型铣路机来说是常见的。在图1中行走机构16b被行走机构16a遮挡,前部的行走机构16a和16b形成前部的行驶机构轴线VF。在图1中行走机构18b被行走机构18a遮挡,后部的行走机构18a和18b形成后部的行驶机构轴线HF。行走机构16a、16b和18a、18b例如构造成链式行走机构。分别优选地,可通过混合动力发动机HM驱动成进给运动的行走机构16a、16b和18a、18b共同地形成行驶机构13、是可偏转的并且承载机架20,机架又承载作业装置12。因此机械10是自行式车辆。
在图1和图2中用箭头g标示出重力作用方向。
可围绕与图1的绘图平面正交的、平行于机械10的俯仰轴Ni延伸的作业轴线R旋转的铣削滚轮14通过铣削滚轮箱22相对于机械10的外部环境被遮蔽,铣削滚轮箱支承铣削滚轮14使其可围绕作业轴线R旋转。铣削滚轮箱22朝向地面U打开,机械10以行走机构16a、16b和18a、18b站立在地面上,并且铣削滚轮14剥除地面,以使得机械10能够按规定进行地面加工。
机架20沿着偏航轴线Gi高度可调节地经由前部的升降柱17a和17b和后部的升降柱19a和19b与行走机构16a、16b、18a或18b连接,由此例如可设定铣削滚轮14的铣削深度t。
可从驾驶台24控制机械10。驾驶台24可按已知方式设有顶罩。内燃机25尤其为混合动力发动机HM提供驱动能量以便作为机械10的进给驱动装置,为作业驱动装置54(参见图2)提供驱动能量以便使铣削滚轮14旋转,并且为偏转装置56(参见图2)提供驱动能量以便使机械10偏转。
在按规定进行地面加工期间,通过铣削滚轮14剥除的地面材料通过运输装置26从作业装置12输送给交付位置28,在示出的示例中在交付位置将剥除的地面材料转交给在地面加工期间带有间距地在侧倾轴线Ro的方向上在机械10之前随行的运输载重汽车30。
侧倾轴线Ro和偏航轴线Gi展开与图1的绘图平面平行的参考平面BE,该参考平面在图2中示出并且标识出。
运输装置26包括更靠近作业装置12的接收带32和与接收带32协作的、距离作业装置12较远的卸料输送带34。接收带32能环绕地、但是其与机架20的相对取向不可变地支承在机架20上。接收带32在转交部位36将由接收带输送的材料转交给卸料输送带34,卸料输送带将收到的材料输送直至交付位置28。卸料输送带34同样是能环绕地、但是可相对于机架20围绕与偏航轴线平行的摆动轴线S摆动地并且可关于与摆动轴线S正交的倾斜轴线倾斜,从而与卸料输送带34的抛料纵向端部重合的交付位置28大致可在球形帽的表面上运动,以使交付位置28匹配相应的随行车辆。
运输装置26沿着其总长度通过罩壳38包封,以避免由于灰尘以及由于可能从运输装置26落下的材料给运输装置26的外部环境造成负担。罩壳38的位于接收带32之上的部分中的大部分都通过机架20实现。
为了进一步降低机械10通过作业装置12的污物排放、尤其灰尘排放,该机械包括具有过滤装置42的吸取机构40。
吸取机构40吸取在吸取位置46处的被加载灰尘的空气,被加载灰尘的空气例如可位于接收带34之上,并且将被加载灰尘的空气以给定的顺序通过预过滤器48以及通过过滤装置42输送至排放位置50,排放位置可为输送鼓风机44处的出口,该出口直接排放到机械10的外部环境中,或排放位置可为在卸料输送带34之上的罩壳38中的通入口,经清洁的空气穿过该通入口再次返回至运输装置26,从而在交付位置28处经清洁的空气与剥除的地面材料一起排出到机械10的环境中。
在过滤装置42中示出了过滤体52,过滤体的纵轴线基本上平行于卸料输送带34的运输方向或运行方向。
在图1中示出了机械10在传统的剥除地面加工期间,其中机械10的进给方向VR在直线行驶中位于平行于图1的绘图平面的参考平面中。
在传统的地面加工运行中在直线行驶时,前部的行驶机构轴线VF和后部的行驶机构轴线HF与平行于图1的绘图平面的参考平面正交。
相对于机架20固定的作业轴线R在结构上与参考平面持续正交。因此,在图1中包含作业轴线R且平行于偏航轴线Gi的作业平面AE与图1的绘图平面正交并且因此与参考平面正交。因此在图1中示出的传统地面加工方法的实施方式中,机械10的进给运动的进给方向平行于机械10的侧倾轴线Ro。
在图2中在俯视图中粗略地示出了图1的机械10在根据上述的根据本发明的地面加工方法加工期间。在该方法中,进给方向VR以偏角α相对于参考平面BE倾斜延伸,机械10沿着进给方向直线行驶。因此,进给方向VR与作业轴线R或与通过作业轴线R和偏航轴线Gi展开的作业平面AE围成与90°不同的角,其中根据上述给出的定义,可在进给方向VR与作业轴线R或与作业平面AE之间确定的角的最小角β应是关键的。与图1中示出的进给方向VR位于参考平面BE中的传统地面加工方法相对,在进给方向VR和作业平面AE之间的角β减小的数量为偏角α。
因此铣削滚轮14相对于进给方向VR具有在前纵向端部14a和在后纵向端部14b。
在图2中用U1以阴影示出了待加工的地面区域,并且为了与其区分用U2表示已经加工的地面区域。已经加工的地面U2通过在当前铣削过程期间由铣削滚轮14形成的铣削棱边58限定。在图2中的作业宽度AB示出,在剥除地面的加工方法期间通过铣削滚轮14剥除多宽的地面。
基于作业轴线R正交于参考平面BE的与机架固定的方向,铣削滚轮14的在后纵向端部14b以相同的偏角α从铣削棱边58转动离开,进给方向VR以该偏角相对于参考平面BE倾斜。由此,相比于前述的以与作业轴线R正交的进给方向的用于剥除的传统地面加工,在铣削滚轮14的在后纵向端部14b的端侧14b1通过铣削运行受到显著更小的剥蚀。而在前纵向端部14a未与待加工的地面区域U1接合以进行剥除,由此,除了在铣削滚轮箱22中剥除的乱飞的地面材料以外,在前纵向端部14a和其端侧14a1不会受到剥蚀。
在图2中示出的铣削滚轮14或其作业轴线R相对于进给方向VR的倾斜设置由偏转装置56引起,偏转装置使得前部的行走机构16a和16b以及后部的行走机构18a和18b相对于参考平面BE以偏转角α转弯,使得尽管偏转角α与0°不同地设置,机械10仍然沿着进给方向VR直线行驶,其中,参考平面BE以及机械10的侧倾轴线Ro相对于进给方向VR倾斜角α。
前部的行驶机构轴线VF的前部的行走机构16a和16b以及后部的行驶机构轴线HF的后部的行走机构18a和18b通常来说是同向的,并且相对于参考平面BE具有数值相同的转向角、尤其偏转角,以便实现对于在此提出的地面加工方法以及与侧倾轴线不同的进给方向VR所需的运动。在此转向角是输入车辆轴线的偏转装置中的偏转控制角。偏转角是在各个行走机构上由对应的转向角得到的角,行走机构的与相应的行走机构的侧倾轴线正交的滚动平面与参考平面围成该角。
因为前部的行驶机构轴线VF的前部的行走机构16a和16b以及后部的行驶机构轴线HF的后部的行走机构18a和18b分别通过转向横拉杆60或62彼此耦联以共同地偏转运动,其中,前部的转向横拉杆60按已知方式布置以便连接两个前部的转向杆64a和64b,并且其中,后部的转向横拉杆62按已知的方式布置以便连接两个后部的转向杆66a和66b,通常在没有其他措施的情况下尽管转向角一致,但是不能在一个且同一个行驶机构轴线的两个行走机构上设置相同的偏转角。因此在没有其他措施的情况下,在以相对于参考平面BE倾斜的进给方向VR直线行驶时出现一定的横向滑移,但是在通常α的值很小时,该横向滑移也具有很小的值,因此可忽略。
在横向滑移不可忽略时,此时这可通过或者例如在前部的转向横拉杆60(该前部的转向横拉杆作为活塞-缸单元68构造成长度可变的)处示出的长度可变的转向横拉杆实现,或可通过在后部的零侧的转向杆66b处示出的转向杆相对于为其配备的行驶机构偏转轴线的相对转动性实现,该零侧的转向杆可围绕与偏航轴线Gi平行的校正轴线K相对于其升级柱19b转动。由此,通过其中一个或多个所述措施可实现,在使用一致的转向角以及相对于参考平面BE数值相同的偏转角时,经由上述梯形转向拉杆系统(由每个行走机构的每个转向杆和连接转向杆的转向横拉杆构成)共同铰接的同一行驶机构轴线的行走机构彼此平行。
代替由转向杆和连接行驶机构轴线的转向杆的转向横拉杆构成的上述梯形转向拉杆系统,也可使每个行走机构经由各自的转向致动器与任何其他的行走机构的偏转状态无关地偏转。
因此与传统的以与作业平面AE正交的进给方向VR的地面加工相比,无需在纵向端部处进行每次的结构改变或无需进行每次的结构保护措施就可实现对于铣削滚轮14在其纵向端部14a和14b处的低磨损的地面加工。这自然也不排除,除了此处说明的地面加工方法以外在铣削滚轮的纵向端部处不使用防磨损措施,例如额外的自动清除式铣刀或/和耐磨损的材料加厚部。其由于总体上通过倾斜设置铣削滚轮14达到了较小的磨损负荷而具有更好的防磨损效果。
优选地,机械10具有控制装置70,例如包括一个或多个集成电路和数据存储器,它们构造成使得基于存储在数据存储器中的运行程序自动地操控机械10,来执行上述的地面加工方法。控制装置70为此可输出控制命令、例如理论转向角给偏转装置56。在控制装置70的数据存储器中可存储预设的偏角α。此外可想到的是,将多个不同的偏角与至少一个运行或作业参数对应地存储,例如根据剥除深度t或/和根据进给速度或/和根据待剥除的地面材料类型来选择,并且根据描述待完成的地面加工的运行参数选择偏角。使得尽管有转向角但是一个或同一个行驶机构轴线的经由梯形转向拉杆系统彼此连接成共同的偏转运动的行走机构彼此平行的关于长度可变的转向横拉杆、例如转向横拉杆60的数据或关于转向杆、例如转向杆66b的校正转动的数据可存储在控制装置70的数据存储器中。因此,控制装置优选也控制长度可变的转向横拉杆或/和可转动的转向杆的补偿运动。
- 地面加工方法和用于实施该方法的地面加工机
- 用于使地面加工机离开行走方向侧向运动的方法以及为了实施该方法而构造的地面加工机