一种可反馈位置的运动引线收集装置及执行器
文献发布时间:2023-06-19 11:54:11
技术领域
本发明属于智能家居技术领域,具体涉及一种可反馈位置的运动引线收集装置及执行器。
背景技术
自动化和智能化是当下家居产品的重要发展方向之一。目前市面上存在一些抽屉可自动推拉或隔板可自动升降的智能家居产品。这些产品中,电动执行机构的布置方式大多数是执行器主体不运动而执行部件(如齿条、推杆等)相对执行器主体运动,这种方式要求运动的执行部件尺寸较大,方能实现抽屉的完全打开和隔板的长距离升降。该技术路线成本较高,会增加家居产品的复杂度,降低整个产品的可靠度,甚至会带来一定的安全隐患。例如,专利CN207881333U提供一种自动开关抽屉机构,以期用于冰箱抽屉的自动开关。该自动开关抽屉机构的工作原理是利用电机驱动齿轮组,齿轮组带动齿条输出,实现抽屉的自动打开和关闭。为实现抽屉的全行程打开,该齿条必须满足一定的长度要求。齿条较长时,执行器体积较大,整机需提供足够的空间来安放齿条,这增加了系统的复杂度和成本。同时冰箱下方抽屉后侧有空压机等部件,若大齿条的存在,必然与后侧空压机产生交集,安全隐患较大。
目前,也有少数执行装置采用相反的布置方式,即执行部件不动而执行器主体随抽屉、隔板等运动组件一起运动。采用这种布置方式时,为执行器主体提供动力的线束在使用过程中需要耐受长期反复弯折的考验,这对线束的耐久性和可靠性提出了非常高的要求,也导致线束成本居高不下。在运行过程中,线束若没有及时准确归位,存在被挤压的风险,产生一定的安全隐患。此外,不规则线束的安放还额外占据了不小的存储空间。例如,专利CN110926090A公开了一种自动开关门的冰箱,该冰箱的抽屉门通过自动开关门组件自动滑出或滑入所述冰箱主体,自动开关门组件的主体跟随抽屉门体做往复运动。但是,该专利未描述控制器与开关门执行器组件的连接方式,也未描述如何克服线束往复运动所带来的上述弊端。
此外,无论是专利CN207881333U还是专利CN110926090A的技术方案,为了实现自动控制,都需要在执行器中单独设置位置检测装置以实现对位置的判断,这不仅增加了整体的复杂度,同时也会带来额外的线束成本。而且,常规的位置检测装置,其精度与成本是密切相关的。光电编码器精度高,占用空间较大,低温或温度冲击环境下运行可靠性较差,成本较高;微动开关与齿条配合,触发方式单一,精度依赖于齿条上的凸点或凹槽的数量,若考虑成本因素,减少凸点或凹槽的数量,在抽屉进出过程中,由于齿条行程速度快,容易出现过冲现象。
发明内容
针对现有技术存在的不足,本发明提供一种可反馈位置的运动引线收集装置及执行器,目的是要解决现有技术中存在的上述问题。
本发明通过以下技术方案来实现:一种可反馈位置的运动引线收集装置,包括:
壳体,壳体内形成容纳空间;
集线辊,集线辊设置在容纳空间中,集线辊与壳体间弹性可旋转连接,集线辊表面设置有集线槽;
引线,引线绕设在集线槽内,引线上可相对集线槽拉出的一端记为活动端,另一端记为固定端,活动端从壳体内向外穿出,固定端穿过集线槽;其中,引线为广义理解,包括多股导线组成的线束、排线、独立导线等。
检测组件,检测组件检测集线辊相对壳体旋转的角度,从而判断活动端移动的距离。
本发明中,由于集线辊与壳体间弹性可旋转连接,因此当引线的活动端向外拉出时,集线辊始终具有将引线重新绕卷到集线槽内的回转扭矩,将引线最大限度地绕卷在集线辊上,既保证引线有序收集,避免引线受到破坏,而且又保证活动端移动的距离与集线辊相对壳体旋转的角度之间存在一一对应关系,确保对距离的准确检测。
进一步地,检测组件包括固定在壳体内的微动开关和设置在集线辊上并与微动开关相配合的至少一个触发部,微动开关每经过触发部都会被触发部触发并产生电信号,因此可以根据微动开关被触发部触动的次数确定集线辊相对壳体旋转的角度。
进一步地,触发部为设置在集线辊上的一个凸起或一个凹槽,或者触发部为环形阵列布置在集线辊上多个凸起或多个凹槽,可以根据检测精度的要求合理调整触发部的密集程度。
进一步地,上述可反馈位置的运动引线收集装置还包括滑动导接组件,滑动导接组件用于将随集线辊运动的固定端电性连接在不随集线辊运动的部件上。如果不使用滑动导接组件而采用导线直连的方式,也能实现本发明的引线收卷和位置检测的基本功能,但集线辊相对壳体可旋转的角度将受到导线柔性的限制。设置滑动导接组件后,集线辊相对壳体可旋转的角度不再受到限制。
具体地,滑动导接组件包括一组导接环和一组弹刷;导接环和弹刷位置相对,导接环和弹刷之间一一对应且弹性可滑动接触;滑动导接组件的安装方式为以下两种中的任意一种:
方式一:导接环与壳体相对固定,弹刷固定在集线辊上,固定端与弹刷电连接;
方式二:弹刷与壳体相对固定,导接环固定在集线辊上,固定端与导接环电连接。
进一步地,弹刷包括呈C形的固定部和一体连接在固定部两端并朝向同一侧翘起的弹性接触部;固定部用于将弹刷固定在预设的位置上,弹性接触部与导接环相接触。
进一步地,集线辊与壳体间连接有涡卷弹簧实现弹性可旋转连接;涡卷弹簧的一端固定在壳体上,另一端固定在集线辊上;涡卷弹簧的弹力提供将引线拉紧和将引线绕在集线辊上的回转驱动力。对于涡卷弹簧,其一端固定而另一端作用有扭矩后,在外加扭矩作用下涡卷弹簧产生弯曲弹性变形,使弹簧在平面内产生扭转,其变形角的大小与扭矩成正比,当作用扭矩消失后,弹簧积蓄的弹力释放,从而使之具有恢复初始状态的趋势。涡卷弹簧优选为等截面的细长高碳钢材料绕制而成的平面螺旋线形的弹簧。
优选地,壳体内设有固定轴,固定轴中央沿轴向开设有卡槽;集线辊一侧设有可容纳涡卷弹簧的圆形沉孔,圆形沉孔内壁上设有侧槽;涡卷弹簧的一端卡设在卡槽内,涡卷弹簧的另一端卡设在侧槽内。涡卷弹簧两端各自的固定方式不仅限于以上方式,例如还可采用铰接固定、销接固定、衬片连接固定、塑封固定、螺钉固定等方式。
进一步地,集线辊中央还设有轴孔,固定轴伸入轴孔中,且固定轴与轴孔之间间隙配合。
基于上述可反馈位置的运动引线收集装置,本发明还进一步提供一种直线运动执行器,包括执行器主体和在执行器主体驱动下相对于执行器主体做直线运动的执行部件,也包括电源和控制单元,还包括上述可反馈位置的运动引线收集装置;执行部件和运动引线收集装置的壳体设置在固定载体上,执行器主体固定在相对固定载体作直线运动的活动载体上;活动端连接在执行器主体上为执行器主体提供驱动力,固定端、电源、检测组件均与控制单元电性连接;检测组件检测集线辊相对壳体旋转的角度确定活动载体与固定载体之间的相对位置,控制单元根据检测组件的信号和输入的执行信号将电源的驱动力可控地输送给执行器主体。
基于上述直线运动执行器,本发明还提供一种冰箱,包括固定载体、活动载体和直线运动执行器;固定载体为冰箱外壳,活动载体为可相对冰箱外壳抽出的抽屉;控制单元根据检测组件的信号和用户通过冰箱操作面板输入的执行信号将电源的驱动力可控地输送给执行器主体,从而实现抽屉自动可控的移出和收回。
有益效果:本发明提供的可反馈位置的运动引线收集装置,整体结构合理紧凑,组件设置简单,成本经济,性能可靠。本发明巧妙地将引线有序收卷与位置检测一体集成,既解决了引线收卷问题,防止引线在运动过程中受到挤压刮擦等破坏,又省去额外设置位置检测装置的成本。此外,该运动引线收集装置与执行器配合使用,可促进执行器的小型化和轻量化,可以实现执行器主体与活动载体的一体化设计,降低了整体结构的复杂度,提高了系统的可靠性,进一步节约了空间。本发明的运动引线收集装置可与平推、升降等各类直线运动执行器配合,既适用于冰箱、消毒柜等家电产品,又适用于智能窗帘、智能门帘等家居产品,尤其在长距离运动中优势显著,具有很高的实际应用价值。
附图说明
图1为壳体的结构示意图。
图2为图1的局部放大图。
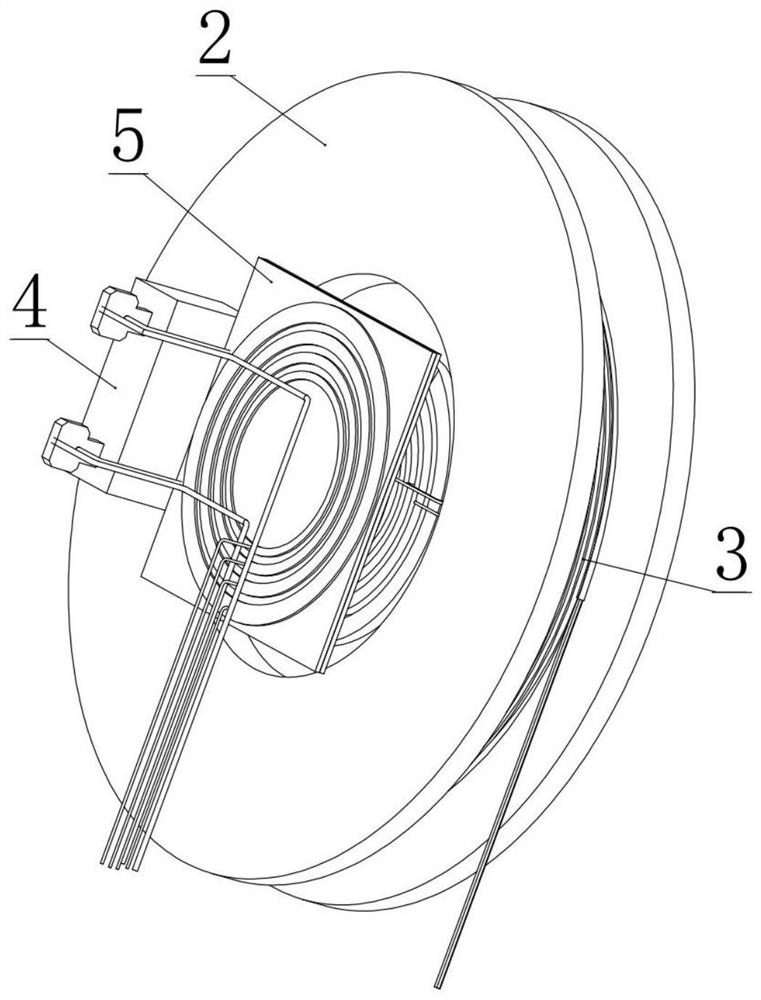
图3和4为运动引线收集装置的内部结构示意图。
图5为集线辊的结构示意图。
图6为集线辊和弹刷的配合示意图。
图7为弹刷和引线的配合示意图。
图8为导接环和弹刷的配合示意图。
图9为微动开关和触发部的配合示意图。
图10为实施例2中触发部在集线辊上的排布示意图。
图中,壳体1、集线辊2、集线槽21、引线3、活动端31、固定端32、检测组件4、微动开关41、触发部42、滑动导接组件5、导接环51、弹刷52、固定部521、弹性接触部522、涡卷弹簧6、固定轴11、卡槽111、圆形沉孔22、侧槽221、轴孔23。
具体实施方式
下面通过具体实施例进一步阐明本发明,这些实施例是示例性的,旨在说明问题和解释本发明,并不是一种限制。
实施例1
一种可反馈位置的运动引线收集装置,如图1至9所示,包括:
壳体1,壳体1呈圆筒状,壳体1内形成容纳空间;
集线辊2,集线辊2呈圆盘状,设置在容纳空间中,集线辊2与壳体1间弹性可旋转连接,集线辊2表面设置有集线槽21;
引线3,引线3绕设在集线槽21内,引线3上可相对集线槽21拉出的一端记为活动端31,另一端记为固定端32,活动端31穿过壳体1上的通孔从壳体1内向外穿出,固定端32穿过集线槽21上的通孔向集线辊2中央引出;
检测组件4,检测组件4检测集线辊2相对壳体1旋转的角度,从而判断活动端31移动的距离。
本实施例中,检测组件4包括固定在壳体1内的微动开关41和设置在集线辊2上并与微动开关41相配合的触发部42,该触发部42为一个凸起,为减轻磨损,凸起与微动开关41的接触部位为圆弧形;检测组件4根据微动开关41被触发部42触动的次数确定集线辊2相对壳体1旋转的角度。
本实施例中,还包括滑动导接组件5,滑动导接组件5包括一组导接环51和一组弹刷52;导接环51和弹刷52位置相对,导接环51和弹刷52之间一一对应且弹性可滑动接触;滑动导接组件5的安装方式为:导接环51同心固载在基板上,基板与壳体1相对固定,弹刷52固定在集线辊2上,固定端32与弹刷52电连接。此外,导接环51上可引出导线,便于与外部电源或可提供电能的控制单元连接。
本实施例中,弹刷52包括呈C形的固定部521和一体连接在固定部521两端并朝向同一侧翘起的弹性接触部522;固定部521固定在集线辊2的一侧,弹性接触部522与导接环51相接触。
本实施例中,集线辊2与壳体1间连接有涡卷弹簧6实现弹性可旋转连接;涡卷弹簧6的一端固定在壳体1上,另一端固定在集线辊2上;涡卷弹簧6的弹力提供将引线3拉紧和将引线3绕在集线辊2上的回转驱动力。具体地,壳体1内设有固定轴11,固定轴11中央沿轴向开设有卡槽111;集线辊2一侧设有可容纳涡卷弹簧6的圆形沉孔22,圆形沉孔22内壁上设有侧槽221;涡卷弹簧6的一端卡设在卡槽111内,涡卷弹簧6的另一端卡设在侧槽221内。
本实施例中,集线辊2中央还设有轴孔23,固定轴11伸入轴孔23,从而使集线辊2围绕壳体1上的固定轴11旋转。
实施例2
一种可反馈位置的运动引线收集装置,如图1至10,将实施例1中集线辊2表面的触发部42由一个凸起替换为呈环形阵列布置的多个凸起,,其余结构不变。
实施例3
一种直线运动执行器,包括执行器主体和在执行器主体驱动下相对于执行器主体做直线运动的执行部件,也包括电源和控制单元,还包括实施例1提供的可反馈位置的运动引线收集装置(如图1至9所示);执行部件和运动引线收集装置的壳体1设置在固定载体上,执行器主体固定在相对固定载体作直线运动的活动载体上;活动端31连接在执行器主体上为执行器主体提供驱动力,导接环51上引出导线连接控制单元,电源、检测组件4也均与控制单元电性连接;检测组件4根据微动开关41被触发的次数检测集线辊2相对壳体1旋转的角度,从而确定活动载体与固定载体之间的相对位置,控制单元根据检测组件4的信号和输入的执行信号将电源的驱动力可控地输送给执行器主体。
实施例4
一种冰箱,包括固定载体、活动载体和实施例3提供的直线运动执行器;固定载体为冰箱外壳,活动载体为可相对冰箱外壳抽出的抽屉;控制单元根据检测组件4的信号和用户通过冰箱操作面板输入的执行信号将电源的驱动力可控地输送给执行器主体,从而实现抽屉自动可控的移出和收回。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进,这些改进也应视为本发明的保护范围。
- 一种可反馈位置的运动引线收集装置及执行器
- 一种可反馈位置的引线收集装置、执行器及冰箱