驾驶辅助系统
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及辅助进行车辆驾驶的驾驶辅助系统。
背景技术
专利文献1公开了一种车辆的驾驶辅助装置。该驾驶辅助装置具备:检测车辆的周边状况的检测部;控制车辆的行驶和停止的控制部;以及对车辆的驾驶员进行通知的通知部。检测部检测车辆前方的暂停(强制停止、停车让行)位置。控制部判定车辆是否进入了包括检测出的暂停位置的预定区间。在车辆进入了预定区间的情况下,控制部转变为禁止加速操作并且使车辆减速而停止在暂停位置的暂停模式。通知部将暂停模式的开始通知给驾驶员。
现有技术文献
专利文献1:日本特开2019-093882号公报
发明内容
发明所要解决的问题
作为辅助进行车辆驾驶的驾驶辅助控制,考虑有各种辅助控制。驾驶辅助控制的一例是根据需要使车辆自动减速的“减速辅助控制”。作为成为减速辅助控制的触发(trigger)的减速对象,可例示存在于车辆前方的前车(在先车辆)、暂停线(停车线)、信号机(交通信号灯)等。减速辅助控制使车辆在这样的减速对象的跟前自动减速。
驾驶辅助控制的另一例是用于回避(规避)车辆前方的风险因素的“风险回避控制”。作为风险因素,可例示存在于车辆前方的行人、自行车、两轮车(摩托车)、停泊车辆等。风险回避控制自动地进行车辆的转向和减速中的至少一方以回避风险因素。
考虑在驾驶辅助控制启动(开始执行)的情况下将其启动之意通知给车辆的驾驶员。例如,在减速辅助控制启动的情况下,将减速对象通知给驾驶员。同样地,在风险回避控制启动的情况下,将风险因素通知给驾驶员。
接着,考虑减速辅助控制和风险回避控制双方同时启动的情况。此时,若将减速对象和风险因素双方同时通知给驾驶员,可能会由于信息过多而让驾驶员觉得烦(烦感)。于是,例如考虑仅将减速辅助控制和风险回避控制中的要求(需要)较高的减速度的一方通知给驾驶员。例如,考虑在由风险回避控制所要求的减速度比由减速辅助控制所要求的减速度高的情况下仅将风险因素通知给驾驶员。
然而,成为减速辅助控制的触发的如前车、暂停线、信号机这样的减速对象的位置是车辆会在不久之后通过的可能性极高的位置。换言之,如前车、暂停线、信号机这样的减速对象对于车辆而言是即将发生的风险或者事件。在尽管驾驶员识别到减速对象但却没有将该减速对象通知给驾驶员的情况下,可能会让驾驶员感到不安(担心)。如此,关于在减速辅助控制和风险回避控制同时启动的情况下的通知,尚有改善的余地。
本发明的一个目的在于,提供能够减轻在减速辅助控制和风险回避控制同时启动的情况下的驾驶员对于通知的烦感和不安的技术。
用于解决问题的技术方案
第1观点涉及一种辅助进行车辆驾驶的驾驶辅助系统。
驾驶辅助系统具备:
处理器;以及
存储装置,其存储表示车辆的驾驶环境的驾驶环境信息。
减速对象包括存在于车辆前方的前车、暂停线、暂停标识、信号机和信号机跟前的停车线中的至少一方。
风险因素包括存在于车辆前方的行人、自行车、两轮车、对向车辆和停泊车辆中的至少一方。
处理器构成为执行:
减速辅助控制,基于驾驶环境信息,在减速对象的跟前使车辆自动减速;
风险回避控制,基于驾驶环境信息,自动进行车辆的转向和减速中的至少一方以回避风险因素;以及
通知处理,将减速对象或者风险因素通知给车辆的驾驶员。
通知处理包括在减速辅助控制和风险回避控制同时启动的期间内将减速对象而非风险因素通知给驾驶员的处理。
第2观点涉及一种辅助进行车辆驾驶的驾驶辅助系统。
驾驶辅助系统具备:
处理器;以及
存储装置,其存储表示车辆的驾驶环境的驾驶环境信息。
减速对象包括存在于车辆前方的前车、暂停线、暂停标识、信号机和信号机跟前的停车线中的至少一方。
风险因素包括存在于车辆前方的行人、自行车、两轮车、对向车辆和停泊车辆中的至少一方。
处理器构成为执行:
减速辅助控制,基于驾驶环境信息,使车辆在减速对象的跟前自动减速;
风险回避控制,基于驾驶环境信息,自动进行车辆的转向和减速中的至少一方以回避风险因素;以及
通知处理,将减速对象或者风险因素通知给车辆的驾驶员。
通知处理包括在第1期间内将减速对象而非风险因素通知给驾驶员的第1通知处理。
紧急区域至少包括车辆正在行驶的第1车道。
第1期间包括减速辅助控制和风险回避控制同时启动并且风险因素不存在于紧急区域的期间。
第3观点在第2观点的基础上还具有以下特征。
通知处理还包括在第2期间内将风险因素而非减速对象通知给驾驶员的第2通知处理。
第2期间包括减速辅助控制和风险回避控制同时启动并且风险因素存在于紧急区域的期间。
第4观点在第2观点的基础上还具有以下特征。
在减速辅助控制和风险回避控制同时启动、且减速辅助控制要求第1减速度、风险回避控制要求第2减速度的情况下,处理器以第1减速度和第2减速度中较高一方使车辆减速。
第1期间还包括减速辅助控制和风险回避控制同时启动、风险因素存在于紧急区域并且第1减速度高于第2减速度的期间。
第5观点在第4观点的基础上还具有以下特征。
通知处理还包括在第2期间内将风险因素而非减速对象通知给驾驶员的第2通知处理。
第2期间包括减速辅助控制和风险回避控制同时启动、风险因素存在于紧急区域并且第1减速度在第2减速度以下的期间。
第6观点在第2~第5观点中任一观点的基础上还具有以下特征。
紧急区域包括第1车道和与第1车道相邻的相邻车道。
第7观点在第1~第3观点中任一观点的基础上还具有以下特征。
在减速辅助控制和风险回避控制同时启动、且减速辅助控制要求第1减速度、风险回避控制要求第2减速度的情况下,处理器以第1减速度和第2减速度中较高一方使车辆减速。
发明效果
根据第1观点,在减速辅助控制和风险回避控制同时启动的期间内,将减速对象而非风险因素通知给驾驶员。由于并不是同时通知减速对象和风险因素双方,因此能减轻由信息过多引起的驾驶员的烦感。另外,将作为即将发生的风险或者事件的减速对象通知给驾驶员,所以能减轻驾驶员对于通信感到的不安。即,能够减轻在减速辅助控制和风险回避控制同时启动的情况下的驾驶员对于通知的烦感和不安。
根据第2观点,在减速辅助控制和风险回避控制同时启动并且风险因素不存在于紧急区域的第1期间内,将减速对象而非风险因素通知给驾驶员。由于并不是同时通知减速对象和风险因素双方,因此能减轻由信息过多引起的驾驶员的烦感。另外,将作为即将发生的风险或者事件的减速对象而非紧急性(紧迫性)低的风险因素通知给驾驶员,所以能减轻驾驶员对于通知感到的不安。
根据第3观点,在减速辅助控制和风险回避控制同时启动并且风险因素存在于紧急区域的第2期间内,将风险因素通知给驾驶员。不通知紧急性低的风险因素,而仅将紧急性高的风险因素通知给驾驶员,所以能减轻驾驶员对于通知的烦感和不安。
根据第4观点,能获得与第2观点同样的效果。另外,通知减速对象的机会增加。由此,能减轻驾驶员对于没被通知减速对象所感到的不安。
根据第5观点,能获得与第3观点同样的效果。
根据第6观点,能获得与第2~第5观点同样的效果。
根据第7观点,能在减速辅助控制和风险回避控制双方同时启动的情况下适当地执行减速控制。
附图说明
图1是用于说明本发明的实施方式涉及的驾驶辅助系统的概要的概念图。
图2是表示本发明的实施方式涉及的车辆以及驾驶辅助系统的构成例的框图。
图3是表示本发明的实施方式中的驾驶环境信息的例子的框图。
图4是用于说明本发明的实施方式涉及的减速辅助控制的一例的概念图。
图5是用于说明本发明的实施方式涉及的减速辅助控制的另一例的概念图。
图6是用于说明本发明的实施方式涉及的减速辅助控制的又一例的概念图。
图7是表示本发明的实施方式涉及的减速辅助控制相关联的处理的流程图。
图8是表示在减速辅助控制的减速对象为前车的情况下显示于显示装置的图标(icon)的一例的概念图。
图9是用于说明本发明的实施方式涉及的风险回避控制的一例的概念图。
图10是用于说明本发明的实施方式涉及的风险回避控制的另一例的概念图。
图11是用于说明本发明的实施方式涉及的风险回避控制的又一例的概念图。
图12是用于说明本发明的实施方式涉及的风险回避控制的又一例的概念图。
图13是表示本发明的实施方式涉及的风险回避控制相关联的处理的流程图。
图14是表示本发明的实施方式涉及的减速辅助控制和风险回避控制双方能够同时启动的状况的一例的概念图。
图15是表示本发明的实施方式涉及的由减速辅助控制和风险回避控制所要求的减速度轮廓(profile)的一例的时间图。
图16是用于说明本发明的实施方式涉及的通知处理的第1例的概念图。
图17是概要地表示本发明的实施方式涉及的通知处理的第1例的流程图。
图18是表示本发明的实施方式涉及的减速辅助控制和风险回避控制双方能够同时启动的状况的另一例的概念图。
图19是用于说明本发明的实施方式涉及的通知处理的第2例的概念图。
图20是用于说明本发明的实施方式涉及的通知处理的第2例的概念图。
图21是概要地表示本发明的实施方式涉及的通知处理的第2例的流程图。
图22是用于说明本发明的实施方式涉及的通知处理的第3例的概念图。
图23是概要地表示本发明的实施方式涉及的通知处理的第3例的流程图。
具体实施方式
参照附图,对本发明的实施方式进行说明。
1.概要
图1是用于说明本实施方式涉及的驾驶辅助系统10的概要的概念图。驾驶辅助系统10执行辅助进行车辆1的驾驶的“驾驶辅助控制”。典型地,驾驶辅助系统10搭载于车辆1。或者也可以为,驾驶辅助系统10的至少一部分配置于车辆1外部的外部装置,远程地执行驾驶辅助控制。也即是说,驾驶辅助系统10也可以分布式地配置于车辆1和外部装置。
驾驶辅助控制的一例是根据需要使车辆1自动减速的“减速辅助控制”。例如如图1所示,在车辆1的前方存在前车3A。在车辆1的驾驶员进行的刹车操作延迟了的情况下,减速辅助控制在车辆1到达前车3A之前使车辆1自动减速。
驾驶辅助控制的另一例是用于回避车辆1前方的风险因素的“风险回避控制”。例如如图1所示,在车辆1前方的路肩上存在行人4A。该行人4A有可能会从路肩进入车行道。因此,存在于车辆1前方的路肩上的行人4A是风险因素。风险回避控制自动进行车辆1的转向以事先回避行人4A。具体而言,风险回避控制使车辆1向从行人4A离开的方向转向。
在驾驶辅助控制启动的情况下,驾驶辅助系统10将其启动之意通知给车辆1的驾驶员。例如,在针对前车3A而启动减速辅助控制的情况下,驾驶辅助系统10将该前车3A通知给驾驶员。同样地,在针对行人4A而启动风险回避控制的情况下,驾驶辅助系统10将该行人4A通知给驾驶员。
接着,考虑减速辅助控制和风险回避控制双方同时启动的情况。此时,若将前车3A和行人4A双方同时通知给驾驶员,可能会由于信息过多而让驾驶员觉得烦。于是,本实施方式涉及的驾驶辅助系统10仅将前车3A和行人4A中的某一方通知给驾驶员。由此,能够减轻由信息过多引起的驾驶员的烦感。
另外,成为减速辅助控制的触发的前车3A的位置是车辆1会在不久之后通过的可能性极高的位置。换言之,前车3A对于车辆1而言是即将发生的风险。在尽管驾驶员识别到前车3A但却没有将该前车3A通知给驾驶员的情况下,可能会让驾驶员感到不安。于是,本实施方式涉及的驾驶辅助系统10将前车3A优先于行人4A通知给驾驶员。由此,能够减轻在减速辅助控制和风险回避控制同时启动的情况下的驾驶员对于通知感到的不安。
以下,更详细地对本实施方式涉及的驾驶辅助系统10进行说明。
2.驾驶辅助系统的构成例
图2是表示本实施方式涉及的驾驶辅助系统10的构成例的框图。驾驶辅助系统10具备传感器组20、行驶装置30、通信装置40、HMI(Human Machine Interface,人机接口)50以及控制装置100。
传感器组20包括位置传感器21、车辆状态传感器22、识别传感器23等。位置传感器21检测车辆1的位置以及方位。作为位置传感器21,可例示GPS(Global PositioningSystem,全球定位系统)传感器。车辆状态传感器22检测车辆1的状态。作为车辆状态传感器22,可例示车速传感器、偏航率(yaw rate)传感器、横向加速度传感器、转向角传感器等。识别传感器23识别(检测)车辆1周围的状况。作为识别传感器23,可例示摄像头(camera)、激光雷达(LIDAR:Laser Imaging Detection and Ranging)、雷达、声纳等。
行驶装置30包括转向装置31、驱动装置32以及制动装置33。转向装置31使车辆1的车轮转向。例如,转向装置31包括动力转向(EPS:Electric Power Steering)装置。驱动装置32是产生驱动力的动力源。作为驱动装置32,可例示发动机、电动机、轮毂电机(in-wheelmotor)等。制动装置33产生制动力。
通信装置40与车辆1的外部进行通信。例如,通信装置40与车辆1外部的管理服务器经由通信网络进行通信。通信装置40也可以与周围的基础设施之间进行V2I通信(路车间通信)。通信装置40也可以与周边车辆之间进行V2V通信(车车间通信)。
HMI50是用于向车辆1的驾驶员提供信息、从驾驶员受理信息的接口。具体而言,HMI50具有输入装置和输出装置。作为输入装置,可例示触摸面板、开关、麦克风等。作为输出装置,可例示显示装置51、扬声器等。作为显示装置51,可例示设置于仪表板的显示器、平视显示器(HUD:Head-Up Display)等。
控制装置100控制车辆1。控制装置100也被称为ECU(Electronic Control Unit,电子控制单元)。该控制装置100具备处理器110以及存储装置120。处理器110执行各种处理。存储装置120中存储有各种信息。作为存储装置120,可例示易失性存储器、非易失性存储器等。通过处理器110执行作为计算机程序的控制程序,从而实现处理器110的各种处理。控制程序存储于存储装置120、或者记录于计算机可读取的记录介质。
例如,处理器110(控制装置100)取得表示车辆1的驾驶环境的驾驶环境信息200。驾驶环境信息200存储于存储装置120。
图3是表示驾驶环境信息200的例子的框图。驾驶环境信息200包括地图信息205、车辆位置信息210、车辆状态信息220、周边状况信息230等。
地图信息205表示车道配置、道路形状等。地图信息205也可以还表示停车线、暂停线、信号机等的位置(绝对位置)。控制装置100从地图数据库取得所需的区域的地图信息205。地图数据库既可以存储在搭载于车辆1的预定的存储装置中,也可以存储在车辆1外部的管理服务器中。在后者的情况下,处理器110经由通信装置40与管理服务器进行通信,取得所需的地图信息205。
车辆位置信息210是表示车辆1的位置以及方位的信息。处理器110从由位置传感器21得到的检测结果取得车辆位置信息210。
车辆状态信息220是表示车辆1的状态的信息。作为车辆1的状态,可例示车速、偏航率、横向加速度、转向角等。处理器110从由车辆状态传感器22得到的检测结果取得车辆状态信息220。
周边状况信息230是表示车辆1周围的状况的信息。周边状况信息230包含由识别传感器23得到的信息。例如,周边状况信息230包含由摄像头拍摄到的表示车辆1周围的状况的图像。作为另一例,周边状况信息230包含由激光雷达和/或雷达计测到的信息。
再者,周边状况信息230包含与车辆1周边的物体有关的信息。作为车辆1周边的物体,可例示周边车辆(例如前车、对向车辆、停泊车辆)、行人、自行车、两轮车、标识、白线、停车线、暂停线、信号机、路侧结构物(例如护栏、路缘石)等。
周边车辆(例如前车、对向车辆、停泊车辆)由识别传感器23识别。例如,周边车辆由摄像头、激光雷达和雷达中的至少一方识别。与周边车辆有关的信息包括周边车辆相对于车辆1的相对位置以及相对速度。处理器110基于由识别传感器23得到的识别结果,计算周边车辆的相对位置以及相对速度。另外,处理器110也可以经由通信装置40与周边车辆之间进行V2V通信,取得周边车辆的位置以及车速的信息。通过将周边车辆的位置以及车速与车辆1的位置(车辆位置信息210)以及车速(车辆状态信息220)组合,能够计算周边车辆的相对位置以及相对速度。
与周边车辆同样地,行人也由识别传感器23识别。与行人有关的信息包括行人相对于车辆1的相对位置以及相对速度。处理器110基于由识别传感器23得到的识别结果,计算行人的相对位置以及相对速度。与行人有关的信息也可以包括行人的移动方向和/或移动速度。处理器110基于由识别传感器23得到的识别结果,计算行人的移动方向和/或移动速度。自行车以及两轮车也与行人的情况是同样的。
此外,周边车辆、行人、自行车和两轮车彼此被区分(辨别)。例如,通过解析由摄像头拍摄到的图像,能够将周边车辆、行人、自行车和两轮车彼此区分。图像解析例如包括利用机器学习的模式识别。
标识由识别传感器23识别。例如,通过解析由摄像头拍摄到的图像来识别以及辨别标识。与标识有关的信息包含标识相对于车辆1的相对位置。处理器110基于由识别传感器23得到的识别结果,计算标识的相对位置。与标识有关的信息也可以还包含标识的内容(例如暂停)。处理器110通过解析由摄像头拍摄到的图像,能够识别标识的内容。
白线(路标线)、停车线以及暂停线(以下,称为“白线组”)由识别传感器23识别。例如,通过解析由摄像头拍摄到的图像来识别以及辨别白线组。也有在暂停线的附近配置指示停车的暂停标识和/或如“停下”这样的路面文字标记的情况。在该情况下,通过识别暂停标识和/或路面文字标记,也能够识别以及辨别暂停线。与白线组有关的信息包括白线组相对于车辆1的相对位置。处理器110基于由识别传感器23得到的识别结果,计算白线组的相对位置。作为另一例,也可以利用包含停车线和/或暂停线的绝对位置的地图信息205。处理器110能够基于车辆位置信息210和地图信息205,识别车辆1周围的停车线和/或暂停线,计算它们的相对位置。
信号机由识别传感器23识别。例如,通过解析由摄像头拍摄到的图像来识别以及辨别信号机及其颜色(信号显示)。与信号机有关的信息包括信号机相对于车辆1的相对位置。处理器110基于由识别传感器23得到的识别结果,计算信号机的相对位置。作为另一例,也可以利用包含信号机的绝对位置的地图信息205。处理器110能够基于车辆位置信息210和地图信息205,识别车辆1周围的信号机,计算该信号机的相对位置。与信号机有关的信息也可以还包括信号机的颜色。处理器110通过解析由摄像头拍摄到的图像,能够识别信号机的颜色。
路侧结构物(例如护栏、路缘石)由识别传感器23识别。与路侧结构物有关的信息包括路侧结构物相对于车辆1的相对位置。处理器110基于由识别传感器23得到的识别结果,计算路侧结构物的相对位置。
另外,处理器110(控制装置100)执行控制车辆1的行驶的“车辆行驶控制”。车辆行驶控制包括控制车辆1的转向的转向控制、控制车辆1的加速的加速控制以及控制车辆1的减速的减速控制。处理器110通过控制行驶装置30来执行车辆行驶控制。具体而言,处理器110通过控制转向装置31来执行转向控制。另外,处理器110通过控制驱动装置32来执行加速控制。另外,控制装置100通过控制制动装置33来执行减速控制。
在辅助进行车辆1的驾驶的驾驶辅助控制中执行车辆行驶控制。处理器110(控制装置100)基于上述的驾驶环境信息200执行驾驶辅助控制。驾驶辅助控制包括“减速辅助控制”和“风险回避控制”。以下,更详细地对减速辅助控制和风险回避控制进行说明。
3.减速辅助控制
减速辅助控制是根据需要使车辆1自动减速的减速控制。成为减速辅助控制的触发的是存在于车辆1前方的“减速对象3”。减速辅助控制在减速对象3的跟前使车辆1自动减速。换言之,减速辅助控制在车辆1到达减速对象3之前使车辆1自动减速。
图4是用于说明减速辅助控制的一例的概念图。车辆1行驶于第1车道L1。在车辆1前方的第1车道L1上存在前车3A。车辆1有可能会与前车3A碰撞,因此前车3A是减速对象3。例如,在驾驶员进行的刹车操作延迟了的情况下,车辆1与前车3A碰撞的可能性增高。为了将与前车3A的碰撞防患于未然,减速辅助控制在车辆1到达前车3A之前使车辆1自动减速。
图5是用于说明减速辅助控制的另一例的概念图。在车辆1前方的第1车道L1上存在暂停线3B。要求车辆1必须在暂停线3B跟前停车。因此,暂停线3B是减速对象3。例如,在驾驶员进行的刹车操作延迟了的情况下,车辆1有可能不停车而超过暂停线3B。为了将这样的事态防患于未然,减速辅助控制在暂停线3B跟前使车辆1自动减速。优选为,减速辅助控制使车辆1停在暂停线3B跟前的相距一定距离的位置。
如图5所示,也有在暂停线3B附近配置指示停车的暂停标识3C的情况。暂停标识3C提示存在暂停线3B。因此,暂停标识3C与暂停线3B同样地也是减速对象3。
图6是用于说明减速辅助控制的又一例的概念图。在车辆1前方存在信号机3D。在信号机3D跟前存在停车线3E。在信号机3D为红色信号(红灯)的情况下,要求车辆1在停车线3E跟前停车。因此,信号机3D和停车线3E是减速对象。例如,在驾驶员进行的刹车操作延迟了的情况下,车辆1有可能不停车而超过停车线3E。为了将这样的事态防患于未然,减速辅助控制在信号机3D(尤其是红色信号)以及停车线3E跟前使车辆1自动减速。
图7是表示本实施方式涉及的减速辅助控制相关联的处理的流程图。图7所示的流程按一定周期反复执行。
在步骤S31中,处理器110取得上述的驾驶环境信息200。驾驶环境信息200存储于存储装置120。之后,处理前进至步骤S32。
在步骤S32中,处理器110基于周边状况信息230,判定是否识别到车辆1前方的减速对象3。减速对象3包括存在于车辆1前方的前车3A、暂停线3B、暂停标识3C、信号机3D(尤其是红色信号)和信号机3D跟前的停车线3E中的至少一方。在识别到车辆1前方的减速对象3的情况下(步骤S32:是),处理前进至步骤S33。除此之外的情况下(步骤S32:否),处理返回至步骤S31。
在步骤S33中,处理器110判定减速辅助控制的启动条件(第1启动条件)是否成立。减速辅助控制的启动条件的一例是车辆1到达减速对象3为止的时间小于预定的时间阈值。在减速对象3为前车3A的情况下,车辆1到达前车3A为止的时间也被称为TTC(Time toCollision,避撞时间)。减速辅助控制的启动条件的另一例是车辆1与减速对象3之间的距离小于预定的距离阈值。减速辅助控制的启动条件也可以还包括车辆1的车速在一定速度以上。
处理器110基于驾驶环境信息200,判定减速辅助控制的启动条件是否成立。具体而言,车辆状态信息220包含车辆1的车速。周边状况信息230包含与识别到的减速对象3有关的信息(相对位置、相对速度)。因此,处理器110能够基于车辆状态信息220和周边状况信息230判定减速辅助控制的启动条件是否成立。在减速辅助控制的启动条件成立的情况下(步骤S33:是),处理前进至步骤S34。另一方面,在减速辅助控制的启动条件不成立的情况下(步骤S33:否),处理前进至步骤S36。
在步骤S34中,处理器110执行减速辅助控制。也即是说,处理器110使减速辅助控制启动,在减速对象3跟前使车辆1自动减速。
更详细而言,处理器110设定目标速度。目标速度既可以为恒定速度,也可以根据减速对象3的种类来设定。例如,在减速对象3为前车3A的情况下,目标速度设定为使车辆1与前车3A之间的相对速度成为零。作为另一例,在减速对象3为暂停线3B或者暂停标识3C的情况下,目标速度设定为0km/h。作为又一例,在减速对象3为信号机3D(红色信号)或者停车线3E的情况下,目标速度设定为0km/h。
接下来,处理器110计算车辆1为了在到达减速对象3之前减速到目标速度所需的“第1减速度D1”。例如,在减速对象3为前车3A的情况下,第1减速度D1是车辆1为了以比TTC短的时间减速到目标速度所要求的减速度。作为另一例,在减速对象3为暂停线3B的情况下,第1减速度D1是车辆1为了停在暂停线3B跟前的相距一定距离的位置所要求的减速度。车辆1的车速根据车辆状态信息220获得。车辆1与减速对象3之间的距离根据周边状况信息230获得。因此,处理器110能够基于车辆状态信息220和周边状况信息230计算第1减速度D1。
然后,处理器110控制制动装置33、也即是说执行减速控制以使得车辆1以第1减速度D1减速。
伴随步骤S34,也执行步骤S35(通知处理)。在步骤S35中,处理器110将减速辅助控制的启动通知给车辆1的驾驶员。特别地,处理器110通过将减速对象3通知给驾驶员而将减速辅助控制的启动通知给驾驶员。典型地,处理器110通过使减速对象3显示于显示装置51,将减速对象3通知给驾驶员。除了显示之外,处理器110也可以还通过扬声器利用语音将减速对象3通知给驾驶员。
图8表示了在减速对象3为前车3A的情况下显示于显示装置51的通知(图标)的一例。图标表示了前车3A。也可以为,按减速对象3的种类而不同的图标显示于显示装置51。
在步骤S36中,处理器110不执行减速辅助控制。也即是说,处理器110不使减速辅助控制启动。在减速辅助控制已经在执行中的情况下,处理器110使减速辅助控制停止。
4.风险回避控制
风险回避控制是用于回避车辆1前方的“风险因素4”的控制。为了回避车辆1前方的风险因素4,风险回避控制自动进行车辆1的转向和减速中的至少一方。
图9是用于说明风险回避控制的一例的概念图。车辆1行驶于车行道RW中的第1车道L1。路肩RS与第1车道L1相邻。存在于车辆1前方的路肩RS上的行人4A有可能会进入车行道RW(第1车道L1)。因此,存在于车辆1前方的路肩RS上的行人4A是风险因素4。风险回避控制自动进行车辆1的转向以事先回避行人4A。具体而言,风险回避控制使车辆1向从行人4A离开的方向转向。此外,行人4A也可以替换为自行车或者两轮车。另外,在本说明书中,路肩RS为包括路侧带的概念。
图10是用于说明风险回避控制的另一例的概念图。与图9的情况同样地,在车辆1前方的路肩RS上存在行人4A。但是,在从行人4A离开的方向上存在对向车辆4B。该对向车辆4B也是风险因素4的一种。在该情况下,风险回避控制自动进行车辆1的转向以回避行人4A和对向车辆4B双方。由于存在对向车辆4B,因此从行人4A离开的方向的转向量比图9中示出的例子的情况下小。在行人4A与对向车辆4B之间的空间小的情况下,风险回避控制也可以进行车辆1的减速。
图11是用于说明风险回避控制的又一例的概念图。行人4C正从车辆1前方的车行道RW(第1车道L1)穿过。存在于车辆1前方的车行道RW上的行人4C是风险因素4。风险回避控制自动进行车辆1的减速以回避行人4C。根据需要,风险回避控制也可以自动进行车辆1的转向以回避行人4C。此外,行人4C也可以替换为自行车或者两轮车。
图12是用于说明风险回避控制的又一例的概念图。风险因素4不限于上述的行人4A和行人4C那样的“明显风险”。风险因素4也可能包括“潜在风险”。例如在图12中,在车辆1前方的路肩RS上存在停泊车辆4D。停泊车辆4D前面的区域为盲区,有可能会从该盲区突然闯出行人4E。因此,车辆1前方的停泊车辆4D是风险因素4(潜在风险)。风险回避控制自动进行车辆1的转向以事先回避停泊车辆4D。具体而言,风险回避控制使车辆1向从停泊车辆4D离开的方向转向。
图13是表示本实施方式涉及的风险回避控制相关联的处理的流程图。图13所示的流程按一定周期反复执行。
在步骤S41中,处理器110取得上述的驾驶环境信息200。驾驶环境信息200存储于存储装置120。之后,处理前进至步骤S42。
在步骤S42中,处理器110基于周边状况信息230,判定是否识别到车辆1前方的风险因素4。风险因素4包括存在于车辆1前方的行人4A、行人4C、自行车、两轮车、对向车辆4B和停泊车辆4D中的至少一方。
此外,关于风险因素4是存在于车行道RW还是存在于路肩RS,能够通过对比风险因素4的位置与白线(路标线)的位置来判定。或者,通过对比风险因素4的位置与由地图信息205所示的车道配置,也能够判定风险因素4是存在于车行道RW还是存在于路肩RS。
在识别到车辆1前方的风险因素4的情况下(步骤S42:是),处理前进至步骤S43。除此之外的情况下(步骤S42:否),处理返回至步骤S41。
在步骤S43中,处理器110判定风险回避控制的启动条件(第2启动条件)是否成立。风险回避控制的启动条件的一例是车辆1到达风险因素4为止的时间小于预定的时间阈值。风险回避控制的启动条件的另一例是车辆1与风险因素4之间的距离小于预定的距离阈值。风险回避控制的启动条件也可以还包括车辆1的车速在一定速度以上。
处理器110基于驾驶环境信息200,判定风险回避控制的启动条件是否成立。具体而言,车辆状态信息220包含车辆1的车速。周边状况信息230包含与识别到的风险因素4有关的信息(相对位置、相对速度)。因此,处理器110能够基于车辆状态信息220和周边状况信息230判定风险回避控制的启动条件是否成立。在风险回避控制的启动条件成立的情况下(步骤S43:是),处理前进至步骤S44。另一方面,在风险回避控制的启动条件不成立的情况下(步骤S43:否),处理前进至步骤S46。
在步骤S44中,处理器110执行风险回避控制。也即是说,处理器110使风险回避控制启动,进行车辆1的转向和减速中的至少一方。
更详细而言,处理器110生成车辆1的目标轨迹TR(参照图9~图12)。目标轨迹TR包括车辆1在车行道RW内的目标位置以及目标速度。车辆1的目标位置以及目标速度是时间的函数。处理器110生成目标轨迹TR以使得车辆1能够回避风险因素4。
例如,处理器110在识别到的风险因素4的周围设定风险区域。风险区域是希望车辆1不要通过的区域。风险区域的大小、即距风险因素4的边缘(余裕)既可以为恒定值,也可以是可变的。例如,风险区域的大小也可以根据车辆1的车速而可变地设定。在该情况下,随着车速增高,风险区域增大。处理器110生成目标轨迹TR以使得车辆1不通过风险区域。车辆1的当前位置根据车辆位置信息210获得。风险因素4的位置根据周边状况信息230获得。车辆1的车速根据车辆状态信息220获得。因此,处理器110能够基于驾驶环境信息200生成目标轨迹TR。
目标轨迹TR需要(请求)车辆1的转向和减速中的至少一方。在图9以及图10中示出的例子的情况下,目标轨迹TR需要从行人4A离开的方向的转向。在图10中示出的例子中,在行人4A与对向车辆4B之间的空间小的情况下,目标轨迹TR也可以需要车辆1的减速。在图11中示出的例子的情况下,目标轨迹TR需要车辆1的减速。在图12中示出的例子的情况下,目标轨迹TR需要从停泊车辆4D离开的方向的转向。
处理器110执行转向控制和减速控制中的至少一方以使得车辆1跟随目标轨迹TR。转向控制和减速控制基于驾驶环境信息200来执行。
具体而言,处理器110计算车辆1为了跟随目标轨迹TR所需的目标转向角。例如,处理器110基于车辆位置信息210和目标轨迹TR,计算车辆1与目标轨迹TR之间的偏差(横向位置偏差、偏航角偏差)。而且,处理器110计算为了减少该偏差所需的转向角作为目标转向角。实际转向角根据车辆状态信息220获得。处理器110控制转向装置31、即执行转向控制以使得实际转向角跟随目标转向角。
另外,处理器110计算车辆1为了跟随目标轨迹TR所需的“第2减速度D2”。也即是说,处理器110计算为了使车速跟随由目标轨迹TR所示的目标速度所需的第2减速度D2。例如,处理器110基于车辆位置信息210、车辆状态信息220(车速)以及目标轨迹TR,计算车速与目标轨迹TR上的目标位置处的目标速度之间的速度偏差。再者,处理器110计算为了减少该速度偏差所需的减速度作为第2减速度D2。而且,处理器110控制制动装置33、也即是说执行减速控制以使得车辆1以第2减速度D2减速。
伴随步骤S44,也执行步骤S45(通知处理)。在步骤S45中,处理器110将风险回避控制的启动通知给车辆1的驾驶员。特别地,处理器110通过将风险因素4通知给驾驶员而将风险回避控制的启动通知给驾驶员。典型地,处理器110通过将风险因素4显示于显示装置51,将风险因素4通知给驾驶员。除了显示之外,处理器110也可以还通过扬声器利用语音将风险因素4通知给驾驶员。
在图9~图12中,也表示了显示于显示装置51的通知(图标)的例子。各图标表示了风险因素4的种类(行人、停泊车辆)。各图标也可以表示风险因素4的位置。在执行转向控制的情况下,图标也可以包括表示方向盘的图画。
在步骤S46中,处理器110不执行风险回避控制。也即是说,处理器110不使风险回避控制启动。在风险回避控制已经在执行中的情况下,处理器110使风险回避控制停止。
5.减速辅助控制和风险回避控制的同时启动
接着,考虑减速辅助控制和风险回避控制双方同时启动的情况。图14表示了减速辅助控制和风险回避控制双方能够同时启动的状况的一例。在图14所示的例子中,在车辆1前方的第1车道L1上存在前车3A(减速对象3)和行人4C(风险因素4)双方。因此,存在相对于前车3A的减速辅助控制和相对于行人4C的风险回避控制同时启动的可能性。
图15是表示由减速辅助控制和风险回避控制所要求的减速度轮廓的一例的时间图。第1减速度D1是由减速辅助控制所要求的减速度。第2减速度D2是由风险回避控制所要求的减速度。处理器110选择第1减速度D1和第2减速度D2中较高一方作为选择减速度DS。而且,处理器110执行减速控制以使得车辆1以选择减速度DS减速。由此,在减速辅助控制和风险回避控制双方同时启动的情况下也能适当地执行减速控制。
例如,在时刻tb~时刻te的期间,减速辅助控制启动,要求第1减速度D1。在时刻ta~时刻te的期间,风险回避控制启动,要求第2减速度D2。因此,在时刻tb~时刻te的期间,减速辅助控制和风险回避控制双方启动,要求第1减速度D1和第2减速度D2双方。在时刻tb~时刻tc的期间,选择减速度DS为第2减速度D2。在时刻tc~时刻td的期间,选择减速度DS为第1减速度D1。在时刻td~时刻te的期间,选择减速度DS为第2减速度D2。
此外,在风险回避控制包括转向控制的情况下,与基于选择减速度DS的减速控制并行地执行风险回避控制的转向控制。在风险回避控制不包括减速控制而仅包括转向控制的情况下,并行地执行减速辅助控制的减速控制与风险回避控制的转向控制。
6.同时启动的情况下的通知处理
接着,考虑减速辅助控制和风险回避控制同时启动的情况下的通知处理(步骤S35、S45)。
6-1.第1例
图16是用于说明本实施方式涉及的通知处理的第1例的概念图。在图16中,表示了在图14以及图15中示出的状况下的选择减速度DS和显示于显示装置51的通知(图标)的例子。
如上所述,在时刻tb~时刻te的期间,减速辅助控制和风险回避控制同时启动。此时,若将前车3A(减速对象3)和行人4C(风险因素4)双方同时通知给驾驶员,可能会由于信息过多而让驾驶员觉得烦。于是,处理器110仅将前车3A和行人4C中的某一方通知给驾驶员。由此,能够减轻由信息过多引起的驾驶员的烦感。
关于通知前车3A和行人4C中的哪一方,按照如下的原则来决定。
首先,考虑比较例。在比较例中,仅将减速辅助控制和风险回避控制中的要求了选择减速度DS的一方通知给驾驶员。因此,如由图16中的比较例所示的那样,在时刻tb~时刻tc的期间内,将行人4C通知给驾驶员。在时刻tc~时刻td的期间内,将前车3A通知给驾驶员。在时刻td~时刻te的期间内,将行人4C通知给驾驶员。
然而,成为减速辅助控制的触发的如前车3A、暂停线3B、信号机3D这样的减速对象3的位置是车辆1会在不久之后通过的可能性极高的位置。换言之,如前车3A、暂停线3B、信号机3D这样的减速对象3对于车辆1而言是即将发生的风险或者事件。在尽管驾驶员识别到减速对象3但却没有将该减速对象3通知给驾驶员的情况下,可能会让驾驶员感到不安。另外,在比较例的情况下,显示于显示装置51的通知(图标)频繁地被切换。这样的通知的频繁切换可能会让驾驶员觉得烦。
于是,处理器110在减速辅助控制和风险回避控制同时启动的期间内,不管选择减速度DS如何,都一直将前车3A等减速对象3通知给驾驶员。由此,能够减轻在减速辅助控制和风险回避控制同时启动的情况下的驾驶员对于通知感到的不安。另外,由于能抑制通知的频繁切换,因此能减轻驾驶员对于通知频繁切换的烦感。
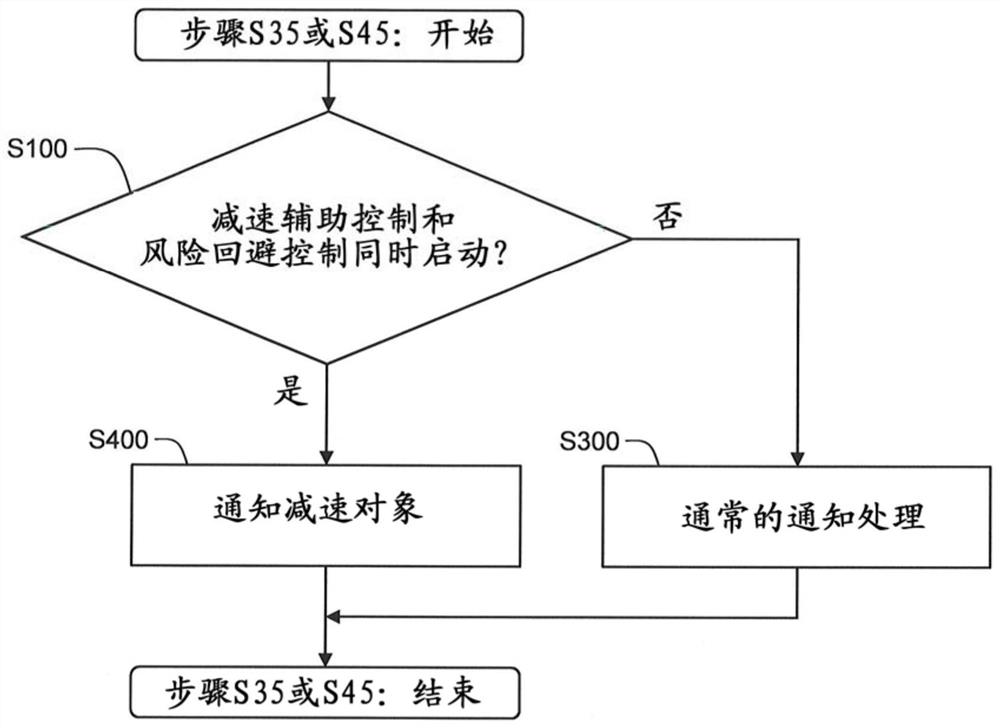
图17是概要地表示本实施方式涉及的通知处理(步骤S35、S45)的第1例的流程图。
在步骤S100中,处理器110判定减速辅助控制和风险回避控制是否同时启动。在仅减速辅助控制和风险回避控制中的一方启动了的情况下(步骤S100:否),处理前进至步骤S300。另一方面,在减速辅助控制和风险回避控制同时启动了的情况下(步骤S100:是),处理前进至步骤S400。
在步骤S300中,处理器110执行通常的通知处理。具体而言,在减速辅助控制启动了的情况下,处理器110将减速对象3通知给驾驶员。另一方面,在风险回避控制启动了的情况下,处理器110将风险因素4通知给驾驶员。
在步骤S400中,处理器110将减速对象3而非风险因素4通知给驾驶员。
如上所述,根据第1例,在减速辅助控制和风险回避控制同时启动的期间内,将减速对象3而非风险因素4通知给驾驶员。由于并不是同时通知减速对象3和风险因素4双方,因此能减轻由信息过多引起的驾驶员的烦感。另外,将作为即将发生的风险或者事件的减速对象3通知给驾驶员,所以能减轻驾驶员对于通信感到的不安。再者,由于能抑制通知的频繁切换,因此能减轻驾驶员对于通知频繁切换的烦感。
6-2.第2例
图18表示了减速辅助控制和风险回避控制双方能够同时启动的状况的另一例。相邻车道LA是与车辆1正在行驶的第1车道L1相邻的车道。行人4C正从车行道RW穿过。更详细而言,行人4C从相邻车道LA进一步地进入第1车道L1中。在该情况下,行人4C的风险增高,相对于行人4C的风险回避控制的紧急度增高。
根据本实施方式涉及的通知处理的第2例,考虑风险回避控制的紧急度。为此,设定“紧急区域RE”。紧急区域RE至少包括车辆1正在行驶的第1车道L1。紧急区域RE也可以除了第1车道L1之外还包括与第1车道L1相邻的相邻车道LA。在行人4C等风险因素4存在于紧急区域RE的情况下,处理器110将风险因素4而非减速对象3通知给驾驶员。
图19以及图20是用于说明本实施方式涉及的通知处理的第2例的概念图。在图19以及图20中,表示了选择减速度DS、行人4C的位置以及显示于显示装置51的通知(图标)的例子。选择减速度DS与上述的第1例的情况是同样的。到时刻tx为止,行人4C存在于第1车道L1以及相邻车道LA之外。在时刻tx~时刻ty的期间,行人4C存在于相邻车道LA。在时刻ty~时刻te的期间,行人4C存在于第1车道L1。
在图19所示的例子中,紧急区域RE是第1车道L1。在时刻tb~时刻ty的期间内,行人4C不存在于紧急区域RE。在该情况下,处理器110将前车3A而非行人4C通知给驾驶员(第1通知处理)。另一方面,在时刻ty~时刻te的期间内,行人4C存在于紧急区域RE。在该情况下,处理器110将行人4C而非前车3A通知给驾驶员(第2通知处理)。如此,处理器110尽量通知前车3A,但在紧急性高的情况下优选通知行人4C。不通知紧急性低的行人4C,仅将紧急性高的行人4C通知给驾驶员,因此能减轻驾驶员对于通知的烦感和不安。
以下,称将前车3A等减速对象3通知给驾驶员的期间为“第1期间P1”。另一方面,称将行人4C等风险因素4通知给驾驶员的期间为“第2期间P2”。在图19所示的例子中,第1期间P1是时刻tb~时刻ty,第2期间P2是时刻ty~时刻te。
在图20所示的例子中,紧急区域RE是第1车道L1和相邻车道LA。在时刻tb~时刻tx的期间内,行人4C不存在于紧急区域RE,处理器110将前车3A通知给驾驶员。也即是说,时刻tb~时刻tx是第1期间P1。另一方面,在时刻tx~时刻te的期间内,行人4C存在于紧急区域RE,处理器110将行人4C通知给驾驶员。也即是说,时刻tx~时刻te是第2期间P2。
图21是概要地表示本实施方式涉及的通知处理(步骤S35、S45)的第2例的流程图。适当省略与上述的第1例重复的说明。
步骤S100和步骤S300与第1例的情况是同样的。在减速辅助控制和风险回避控制同时启动了的情况下(步骤S100:是),处理前进至步骤S200。
在步骤S200中,处理器110基于驾驶环境信息200,判定风险因素4是否存在于紧急区域RE。例如,通过对比由周边状况信息230所示的风险因素4与白线(路标线)的各自的位置,能够判定风险因素4是否存在于紧急区域RE。作为另一例,通过对比风险因素4的位置和由地图信息205所示的车道配置,也能够判定风险因素4是否存在于紧急区域RE。在风险因素4不存在于紧急区域RE的情况下(步骤S200:否),处理前进至步骤S400。另一方面,在风险因素4存在于紧急区域RE的情况下(步骤S200:是),处理前进至步骤S500。
在步骤S400中,处理器110执行第1通知处理。在第1通知处理中,处理器110将减速对象3而非风险因素4通知给驾驶员。可以说第1期间P1包括减速辅助控制和风险回避控制同时启动并且风险因素4不存在于紧急区域RE的期间。
在步骤S500中,处理器110执行第2通知处理。在第2通知处理中,处理器110将风险因素4而非减速对象3通知给驾驶员。可以说第2期间P2包括减速辅助控制和风险回避控制同时启动并且风险因素4存在于紧急区域RE的期间。
如上所述,根据第2例,在减速辅助控制和风险回避控制同时启动并且风险因素4不存在于紧急区域RE的第1期间P1内,将减速对象3而非风险因素4通知给驾驶员。由于并不是同时通知减速对象3和风险因素4双方,因此能减轻由信息过多引起的驾驶员的烦感。另外,将作为即将发生的风险或者事件的减速对象3而非紧急性低的风险因素4通知给驾驶员,因此能减轻驾驶员对于通知感到的不安。
另外,在减速辅助控制和风险回避控制同时启动并且风险因素4存在于紧急区域RE的第2期间P2内,将风险因素4而非减速对象3通知给驾驶员。由于不通知紧急性低的风险因素4,而仅将紧急性高的风险因素4通知给驾驶员,因此能减轻驾驶员对于通知的烦感和不安。
6-3.第3例
图22是用于说明本实施方式涉及的通知处理的第3例的概念图。第3例是上述的第2例的变形例。选择减速度DS以及行人4C的位置与第2例的情况下相同。
在时刻tc~时刻td的期间内,由减速辅助控制所要求的第1减速度D1高于由风险回避控制所要求的第2减速度D2。可认为在该期间内减速辅助控制的紧急性也高。于是,根据第3例,即使行人4C存在于紧急区域RE,但在第1减速度D1高于第2减速度D2的期间内,仍然优选将前车3A通知给驾驶员。因此,第1期间P1除了图19中示出的第1期间P1(时刻tb~时刻ty)之外还包括时刻ty~时刻td的期间。
图23是概要地表示本实施方式涉及的通知处理(步骤S35、S45)的第3例的流程图。适当省略与上述的第1以及第2例重复的说明。步骤S100、S200以及S300与第2例的情况是同样的。在风险因素4不存在于紧急区域RE的情况下(步骤S200:否),处理前进至步骤S400。另一方面,在风险因素4存在于紧急区域RE的情况下(步骤S200:是),处理前进至步骤S250。
在步骤S250中,处理器110判定第1减速度D1是否高于第2减速度D2。在第1减速度D1高于第2减速度D2的情况下(步骤S250:是),处理前进至步骤S400。另一方面,在第1减速度D1在第2减速度D2以下的情况下(步骤S250:否),处理前进至步骤S500。
在步骤S400中,处理器110执行第1通知处理。在第1通知处理中,处理器110将减速对象3而非风险因素4通知给驾驶员。即,第1期间P1包括:(a)减速辅助控制和风险回避控制同时启动并且风险因素4不存在于紧急区域RE的期间;以及(b)减速辅助控制和所述风险回避控制同时启动、且风险因素4存在于紧急区域RE、再者第1减速度D1高于第2减速度D2的期间。
在步骤S500中,处理器110执行第2通知处理。在第2通知处理中,处理器110将风险因素4而非减速对象3通知给驾驶员。即,第2期间P2包括减速辅助控制和风险回避控制同时启动、且风险因素4存在于紧急区域RE、再者第1减速度D1在第2减速度D2以下的期间。
根据以上说明的第3例,与第2例的情况相比,通知减速对象3的机会增加。由此,能减轻驾驶员对于没被通知减速对象3所感到的不安。
- 驾驶辅助系统的电源管理方法、装置及驾驶辅助系统
- 用于车辆的驾驶辅助系统、带驾驶辅助系统的车辆和用于车辆的驾驶辅助方法