一种基于混合改进磷虾群算法和模糊控制器的MPPT算法
文献发布时间:2023-06-19 12:19:35
技术领域
本发明属于光伏发电控制技术领域,涉及一种基于混合改进磷虾群算法和模糊控制器的MPPT算法。
背景技术
近几十年来,为了获得更大的经济、技术和环境效益,人们纷纷利用光伏(PV)和风能等可再生能源来替代化石燃料。太阳能系统由于其可利用性高、污染性低以及安装使用较灵活的特点,成为了燃料发电厂最重要的替代品之一。
为了最大限度地提高太阳能系统的输出功率,现对太阳能系统输出的非线性特性的研究,目前常采用的方法为最大功率点跟踪方法,该方法可以在低成本的条件下轻松实现,从而提高光伏发电的效率,但在快速变化的大气环境下得到最佳的控制参数是本发明需要解决的问题。
发明内容
发明目的:为解决如何得到最佳的MPPT的控制参数,本发明提出了一种基于混合改进磷虾群算法和模糊控制器的MPPT算法,对模糊控制器的MFs进行调整,以处理波动引起的不确定性,使得本发明的MPPT算法能够在快速变化的大气环境下准确追踪和快速动态响应。
技术方案:一种基于混合改进磷虾群算法和模糊控制器的MPPT算法,包括:
根据DC/DC升压转换器的电压V
基于时刻k对应的太阳能发电系统的功率P
基于最优MFs比例因子,模糊控制器输出时刻k对应的占空比D(k);
基于时刻k对应的占空比D(k)与时刻k-1对应的占空比D(k-1),得到占空比变化量ΔD,在占空比变化量ΔD的控制下,DC/DC升压转换器的输出功率向最大功率方向转移;
其中,所述改进磷虾群算法包括以下步骤:
步骤1:将MFs作为磷虾个体,每个磷虾个体的适应度函数为该磷虾个体位置距离食物和群体最高密度的距离的结合;
随机产生pn个初始磷虾个体,计算每个磷虾个体的适应度值,并确定当前最优的磷虾位置;
步骤2:每个磷虾个体按照式(1)~(4)计算其运动向量,按照式(5)更新位置;
磷虾i的实时位置取决于引导运动
所述引导运动
式中,α
所述觅食运动
式中,ω
所述随机扩散运动
式中,
根据下式更新磷虾个体i的位置:
式中,
步骤3:Iter=Iter+1,更新每个磷虾个体的适应度值,确定当前最优磷虾位置;
步骤4:判断是否达到最大迭代次数,若未达到,则返回步骤2,否则输出最优磷虾位置,即得到最优MFs比例因子。
进一步的,所述β(r)表示为:
式中,β
进一步的,还包括:
DC/DC升压转换器将最大功率传输出至网侧逆变器,采用PQ控制算法,通过跟踪参考功率来控制注入主电网的有功功率或无功功率。
进一步的,所述PQ控制算法包括以下步骤:
利用Park变换,将网侧逆变器的输出电压解耦到d轴和q轴,得到u
网侧逆变器的输出电流i
网侧逆变器的输出电流i
将网侧逆变器的参考电压u
本发明还公开了一种供电系统,包括太阳能光伏发电系统、MKH-FLC模块、DC/DC升压转换器和网侧逆变器;
所述太阳能光伏发电系统,用于将太阳能转化为电能;
所述MKH-FLC模块,用于根据太阳能光伏发电系统的功率,采用改进磷虾群算法对模糊控制器的MFs比例因子的进行调整,得到最优MFs比例因子;基于最优MFs比例因子,模糊控制器输出时刻k对应的占空比D(k);基于时刻k对应的占空比D(k)与时刻k-1对应的占空比D(k-1),得到占空比变化量ΔD;
所述DC/DC升压转换器,用于在占空比变化量ΔD的控制下,向网侧逆变器输入最大功率;
所述网侧逆变器,用于基于PQ控制算法,调节注入主电网的有功功率或无功功率。
进一步的,所述改进磷虾群算法包括以下步骤:
步骤1:将MFs作为磷虾个体,每个磷虾个体的适应度函数为该磷虾个体位置距离食物和群体最高密度的距离的结合;
随机产生pn个初始磷虾个体,计算每个磷虾个体的适应度值,并确定当前最优的磷虾位置;
步骤2:每个磷虾个体按照式(1)~(4)计算其运动向量,按照式(5)更新位置;
磷虾i的实时位置取决于引导运动
所述引导运动
式中,α
所述觅食运动
式中,ω
所述随机扩散运动
式中,
根据下式更新磷虾个体i的位置:
式中,
步骤3:Iter=Iter+1,更新每个磷虾个体的适应度值,确定当前最优磷虾位置;
步骤4:判断是否达到最大迭代次数,若未达到,则返回步骤2,否则输出最优磷虾位置,即得到最优MFs比例因子。
进一步的,所述β(r)表示为:
式中,β
有益效果:采用本发明的算法,大大提高效率和收敛速度,并且可以减少稳态波动。
附图说明
图1为PQ控制示意图;
图2为PI控制示意图;
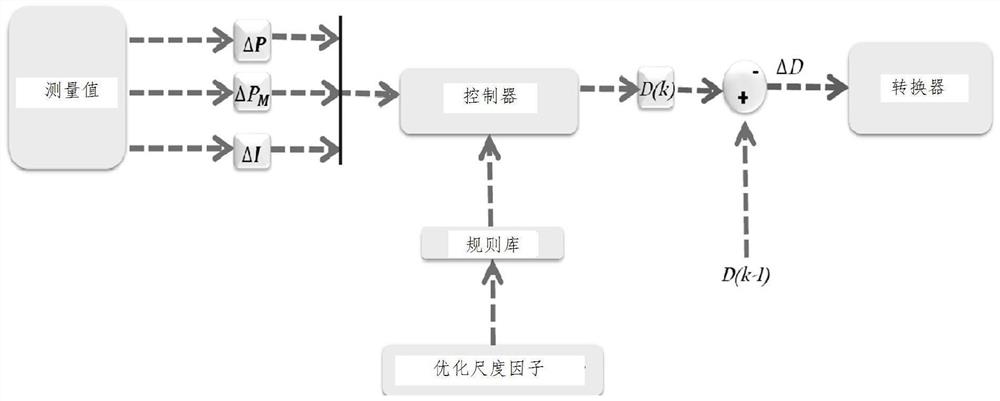
图3为自适应FLC控制示意图;
图4为本发明的供电系统框图示意图;
图5为太阳能辐射变化示意图;
图6为各种条件下PV的输出功率变化示意图;
图7为各种条件下PV的输出功率对比示意图;
图8为各控制算法的响应时间对比示意图;
图9为最大功率点周围的波动对比示意图;
图10为各控制算法下的光伏系统的输出功率示意图;
图11为温度变化示意图;的结果及其相关性功率输出
图12为在图11温度变化的情况下,各控制算法对应的输出功率示意图;
图13为平均效率对比示意图;
图14为反应时间对比示意图;
图15为最大功率点周围的波动对比示意图;
图16为电池功率对比示意图;
图17为辐照度对比示意图
图18为光伏功率对比示意图。
具体实施方式
现结合附图和实施例进一步阐述本发明的技术方案。
本发明将MKH算法应用于MFs比例因子的调整,通过缩放因子而不是模糊集范围进行调整会导致优化方法中变量数量的减少,并达到快速跟踪的速度。参见图3和图4,具体包括以下步骤:
根据DC/DC升压转换器的电压V
基于时刻k对应的太阳能发电系统的功率P
基于最优MFs比例因子,模糊控制器输出时刻k对应的占空比D(k);
基于时刻k对应的占空比D(k)与时刻k-1对应的占空比D(k-1),得到占空比变化量ΔD,在占空比变化量ΔD的控制下,DC/DC升压转换器的输出功率向最大功率方向转移;达到最大功率的过程始于初始占空比,占空比根据功率的初始变化而增加,这个过程将一直持续到太阳能系统的性能达到其最大功率点为止;
DC/DC升压转换器将最大功率传输出至网侧逆变器,采用PQ控制算法,通过跟踪参考功率来控制注入主电网的有功功率或无功功率。
其中,磷虾群算法是对磷虾在海洋中的行为进行建模的方法,其主要优势包括本地搜索和全局搜索之间的适当平衡,以及具有解决离散和连续优化问题的能力。本发明为了增加磷虾种群的多样性,提出了改进磷虾群算法,大大提高传统磷虾群算法的收敛能力,并且降低了陷入局部最优的可能性。本发明的改进磷虾群算法包括以下步骤:
步骤1:将MFs作为磷虾个体,每个磷虾个体的适应度函数为该磷虾个体位置距离食物和群体最高密度的距离的结合;
随机产生pn个初始磷虾个体,计算每个磷虾个体的适应度值,并确定当前最优的磷虾位置;
步骤2:每个磷虾个体按照式(1)~(4)计算其运动向量,按照式(5)更新位置;
磷虾i的实时位置取决于引导运动
每一只鳞虾的速度都会被周围鳞虾影响,因此引导运动
式中,α
所述觅食运动
式中,ω
随机扩散通过一个正态随机保证了种群的不同,因此本发明的随机扩散运动
式中,
本发明通过引入单调递减函数来更新磷虾个体a的位置:
式中,
步骤3:Iter=Iter+1,更新每个磷虾个体的适应度值,确定当前最优磷虾位置;
步骤4:判断是否达到最大迭代次数,若未达到,则返回步骤2,否则输出最优磷虾位置,即得到最优MFs比例因子。
其中,参见图1和图2,PQ控制算法包括以下步骤:
使用dq帧中的电源控制块创建当前控制的参考,电流控制器利用PI调节器补偿稳态误差。为了同步功率变换器的频率和相位,采用了锁相环(PLL)。在这种方法中,通过跟踪功率参考来控制注入主电网的有功/无功功率。
逆变器的输出电压可以表示为:
利用Park变换,dq帧内三相电压可表示为:
在输出电压中加入同步参考系可以将电压解耦到d轴和q轴,从而使电流控制器性能良好。u
利用电流,有功功率和无功功率均可调节。事实上,当PQ控制器开始跟踪参考电流i
逆变器电流在d轴和q轴上耦合,i
采用前向反馈路径,可将参考电流解耦到d轴和q轴,从而获得精确的控制性能。图2为带前馈路径的PI补偿器。
上式中,ω为角频率,L为滤波电感,v
实施例:
现以图4为参考,采用9个9×9配置的7.3kW PV阵列构成供电系统模型,该供电系统模型以220V和60Hz的频率运行。表1给出了该系统的更多详细信息。
现对上述模型进行MATLAB软件测试,对测试结果进行评估。如图5所示,将太阳系的辐照度在t=2.5s到t=4.5s之间减小。此外,在T=25℃时从t=4.5s升高到t=12s。图6给出了各种条件下PV的输出功率。在并网模式下,本发明的MKH-FLC表现出快速的性能,并且在MPP附近存在一些小的不一致性。与FLC、IC和P&O相比,MKH-FLC还可以跟踪恶劣天气条件下变化最小的最佳点,如表2所示。
表2对比结果
如图所示,使用MKH-FLC方法获得的第一间隔的平均功率为4.95kW。根据图6,使用其他方法的平均功率结果在4.23kW至4.49kW之间变化,这表明本发明方法比常规技术具有更高的性能。考虑到太阳辐射的各种条件,因此将平均值用作确定该方法优越性的指标。
根据图7,本发明方法具有99%的效率,传统方法的效率只有92%-97%能达到MPP。此外,MKH-FLC的响应时间为0.13s,但是对于其他方法,响应时间为16s-35s,如图8,从结果可以看出,MKH-FLC>KH-FLC>FLC>IC>P&O。MKH-FLC在MPP周围显示5.2W的变化;如图9所示,该值为37-79W,这证实了本发明方法的有效性。如图10所示,光伏系统的输出功率将为网络供电以充当备用系统。
现采用如相对误差(E),MAE和RMSE,对本发明的控制方案性能进行评估。功率输出会极大地影响整个系统的效率。表3为评估结果。
表3评估结果
可以看出,本发明方法得出的相对误差值基本上等于1.5,该值小于其他方法。本发明方法的RMSE值为3.97,而HC方法的RMSE值最高,约为23.25。
图11显示了温度变化的结果及其相关性功率输出,如图所示,将温度降低到t=2.5s至t=4.5s和t=6.5s至8.5s之间以评估灵敏度,图12给出了不同方法的输出功率。结果表明,本发明方法在跟踪MPP时具有最小的波动和更大的输出功率。比较结果如表4所示,使用多种温度场景获得的光伏阵列的功率输出。可以看出,使用MKH-FLC技术可在第一个间隔中获得3.7kW的平均功率。从图12可以看出,使用传统方法(例如FLC,IC和P&O)的平均功率结果为在3.695到3.61kW之间变化,这表明本发明方法具有增强的性能。
表4
在图13中,本发明方法具有99%的效率。传统方法有92%-97%效率。
此外,MKH-FLC的响应时间为0.15s,但对于其他方法,响应时间为0.17s至0.31s。
如图14所示,MKH-FLC在MPP周围显示5.7W偏差;如图15所示,该值为38-73W,这证实了本发明方法的效率。如图16所示,太阳能的输出功率BES为网络注入电源,以作为备用系统运行。
由表5可以看出,本发明方法获得的相对误差值确定为等于1.2,与其他方法相比,该值实质上较低。本发明方法的RMSE值等于3.71,但是HC方法的RMSE值最高,约为22.98。
表5
图17描绘了太阳辐照度的变化,图17为在不同辐射情况下的有功功率,将本发明提出的MKH-FLC技术与其他传统方法的性能进行了比较,具有低速辐照度偏差的太阳能系统的输出功率在图18中给出,证实了本发明所提出方法在跟踪和补偿太阳能辐照度的间歇性方面的优势。
- 一种基于混合改进磷虾群算法和模糊控制器的MPPT算法
- 一种改进的MPPT算法及基于该算法的太阳能LED路灯系统