意识关联康复机器臂运动意愿提取及协同控制方法
文献发布时间:2023-06-19 18:30:43
技术领域
本发明属于康复机器人技术领域,具体涉及一种意识关联康复机械臂运动意愿提取及协同控制方法。
背景技术
在当前医疗条件下,脑卒中所引起的诸如偏瘫、运动或语言功能障碍等后遗症,仍然是当今医疗界所面临的一个难题。相关临床研究表明,对脑卒中后遗症患者,必须争取早期康复治疗,尤其在发病后前三个月内进行康复治疗是获得理想功能恢复的最佳时机,治疗总效率可达92.4%。因此,康复训练器械作为一种有效的康复手段,使得中风后遗症患者能够最大限度的恢复到正常状态,以减轻患者的生理和心理痛苦,减轻家庭和社会的负担。
现有的传统纯机械式康复机器臂往往需要康复治疗师控制,辅助患者进行康复活动,患者很难同机器进行良好的人机交互,其也没有通过患者自身的脑电、肌电信号进行提取、处理及对患者的运动意愿进行分析,从而不仅很难将患者的运动意愿准确地反映到机械臂的运动状态上,而且也不具有镜像康复功能,患者的康复训练过程往往都是被动的、单一的,机械臂本身的高刚度也极易对患者的患侧肌肉组织产生二次损伤。因此,传统的纯机械式康复机械臂很难使患者拥有较好的康复体验,也未必能够达到预想的康复效果。
发明内容
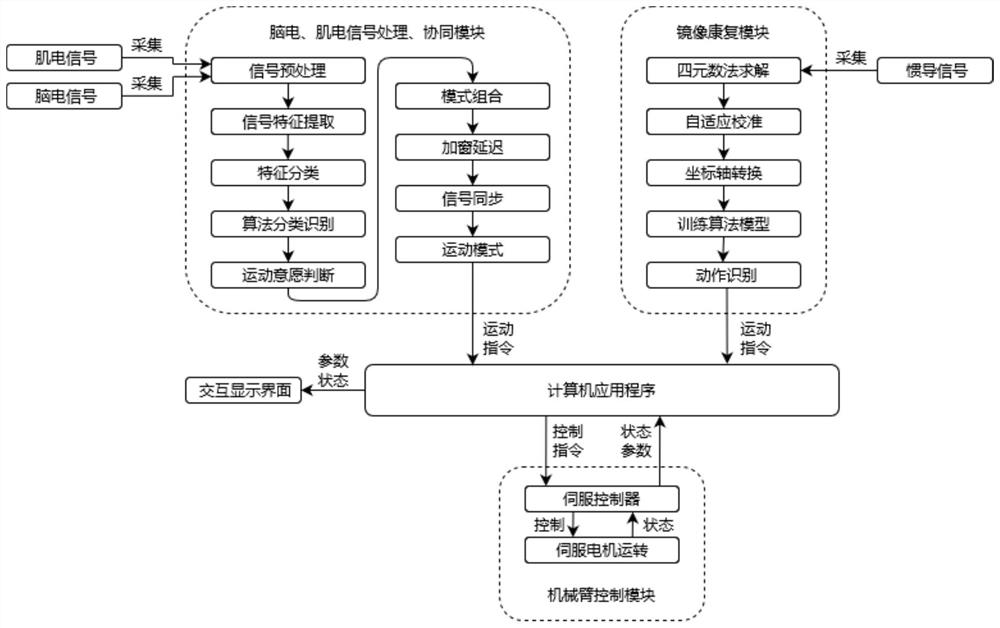
为了使患者拥有更佳的康复训练体验和康复效果,本发明提供了一种基于患者的运动意愿提取及协同控制方法,提高患者在康复训练中的主动参与度,保证患者在康复训练过程中的舒适度和安全性。本发明基于人体骨骼及肌肉生理特点,利用患者脑电、肌电及健侧惯性信号来控制康复机械臂设备运动,脑电信号为患者运动意愿发生时的反馈提供依据,肌电信号为患者运动意愿进行时的反馈提供依据,而健侧惯性信号为患者根据自身意愿,完全自主的进行自身健侧镜像带动患侧运动康复提供依据,从而全流程地实现患者主动康复训练运动,这种基于患者运动意愿的康复训练适用于绝大部分脑卒中患者的康复治疗,且现代医学证明相对于被动训练,患者的主动参与会有更好的康复效果,这种方式还具有性价比高、安全稳定、结构简约等优势。
为了达成上述发明目的,解决现有的传统纯机械式康复机器臂存在的问题,本发明的技术方案是:
一种意识关联康复机器臂运动意愿提取及协同控制方法,具体步骤如下:
步骤1:配置脑电信号采集模块
为了方便使用,同时避免为患者带来更多使用负担,本发明采用非植入式的干电极脑电采集电极帽进行脑电信号采集。所述的干电极脑电采集电极帽有多个采集通道,并配置好采样精度和采样频率,采集到的脑电信号被放大后,通过无线传输模块发送到计算机应用程序中的脑电信号处理模块,脑电信号处理模块对脑电信号进行预处理、特征提取和分类识别。由于脑电信号常常会受到眼电伪迹、肌电伪迹以及其他干扰信号影响,所以脑电信号作为判断患者的手臂运动意愿的根据之一,还需要患者患侧肌电信号予以辅助判断患者的运动意愿。
步骤2:配置肌电信号采集模块
采用无损采集即将电极贴粘在患者上肢表皮的肌电信号采集方式。以康复医学理论为依据,选取主要的康复动作为标准动作,包括肩关节的屈伸、收展,肘关节的屈伸共三个主要动作。由于上肢的运动不是单个肌肉收缩产生的,而是肌群联合收缩作用产生的,所以要确定人体执行康复动作的主要肌群。采集到的患者肌电信号进行放大后,通过无线传输模块发送到计算机应用程序中的肌电信号处理模块,肌电信号处理模块对肌电信号进行预处理、特征提取和分类识别。
步骤3:配置惯性信号采集模块
采用具有三轴陀螺仪、三轴加速度计和三轴磁力计的惯性传感器为惯性信号采集模块的核心。为了实现镜像康复功能,需获得患者健侧的运动状态,将三个惯性信号采集模块利用扎带分别固定到患者健侧的手腕、手肘近小臂端和大臂近肩端。惯性信号采集模块通过惯性传感器检测患者健侧运动过程中的惯性信号,惯性传感器自带的数字运动处理器再对得到的惯性信号整合;而后将整合后的惯性信号通过无线传输模块发送到计算机应用程序中的镜像信号处理模块,通过四元数法进行解算,得到可靠的姿态数据;再将姿态数据输入到训练好的循环神经网络(RNN)算法处理,输出患者健侧的姿态动作;进而由计算机向患者患侧机械臂各关节电机发送执行命令,实现患者通过自主运动健侧带动患侧的康复运动功能。
步骤4:对于脑电信号的采集和处理
脑电信号通过患者对康复动作的运动想象产生,脑电信号通过电极帽进行采集后,由于采集过程中的眼电干扰、肌电干扰、抖动等影响,脑电信号并不纯净,所以需要对采集到的原始脑电信号进行处理;具体过程如下:
步骤4.1:脑电信号预处理
(1)利用均值法对数据进行基线校正,使用动态脑电信号减去所对应通道前400ms的数据均值,得到校正后的信号值。
(2)由于脑电信号的频率带根据人脑不同活动状态,其频率带也有所不同,根据相关研究,8-12Hz的α节律信号是与人体上肢运动密切相关的,因此本发明利用具有良好平滑性能的巴特沃斯滤波器对校正后的信号进行滤波处理,通过MATLAB的信号处理工具箱构建出巴特沃斯滤波器。构建巴特沃斯滤波器最重要的是对变频器阶数和参数设置,具体设置参数为:阻带最小衰减A
(3)对于脑电信号采集过程中的眼电干扰、肌电干扰、抖动等干扰信号,利用二阶盲源分离法对干扰信号进行分离和清除,即经过对信号白化处理、估计协方差阵和混合矩阵、联合矩阵对角化等步骤构造分离算法,实现将混杂信号分离为脑电信号和干扰信号,再将干扰信号置零,进而得到所需纯净的脑电信号。
步骤4.2:脑电信号特征提取
本发明采用共空间模式(CSP)算法对脑电信号进行特征提取,其原理是利用最佳的空间滤波器进行投影,使两类事件之间特征方差的差距最大化,进而使一类事件的特征方差最大,另一类事件的特征方差最小,从而区分出两类事件。本发明基于此算法经过求白化特征矩阵、主分量分解、求投影矩阵等步骤设计最佳的空间滤波器,用于对不同的脑电信号特征分类,进而可以方便分类器根据特征值对脑电信号特征进行分类识别。
步骤4.3:脑电信号分类识别
脑电信号的特征识别采用支持向量机(SVM)算法对脑电信号进行分类识别,由于脑电信号的非平稳性特点,所以其特征具有非线性,SVM分类器模型选用核函数为拉普拉斯核函数:
步骤5:对于肌电信号的采集和处理
步骤5.1:计算机应用程序的肌电信号处理模块对采集到的肌电信号进行预处理,即对信号进行二阶差分滤波,去除背景噪声和工频干扰。
步骤5.2:识别肌电信号的有效活动段,从而获取相关数据进行特征提取。肌电信号活动段检测采用滑动平均法,通过信号阈值来判断动作的起止点,过程如下:预先对患者患侧目标肌肉贴上4个检测电极,形成4通道检测;设置采样频率f,设置窗长W;然后设定步长n,并以步长n对采集到的肌电信号进行滑动平均处理;根据患者肌肉力量的情况选择适当的阈值T,这样能够提高分类识别的准确率,若数据序列中连续10个数据均大于阈值T,则将第一个点作为起点,相应的可以确定有效活动段的止点,进而得到了有效活动段的起止点。
在得到有效活动段后,利用信号的时域和频域特征组成的特征向量,进行活动信号的特征提取。使用到的时域特征包括:过零点数(ZC)、波形长度(WL)及均方根(RMS);使用到的频域特征包括:平均功率(MNP)及中值频率(MDF)。
过零点数(ZC)表示肌电信号在有效活动段中振幅穿越零轴的次数,同时考虑无效抖动的影响,加入一个阈值σ进行判断;计算公式如下:
其中,x(i)为肌电信号数据,N为采集数据量,i为数据序号。
波形长度(WL)表示有效活动段的相邻采样点间的幅度差值;计算公式如下:
均方根(RMS)表示有效活动段内肌电信号有效值的大小;计算公式如下:
平均功率(MNP)表示肌电信号功率谱密度的均值,p
中值频率(MDF)是将功率谱等分的中间频率,f为频率,f
在得到各种特征值后,面临庞杂的数量区间和量纲,此刻需要归一化处理,简化复杂数据。采用区间缩放法,将特征统一缩放至区间(0,1)中。原始特征用y
步骤5.3:采用有监督的分类算法进行肌电信号的分类识别。目前主流的二分类模式识别算法有两种,即线性判别分析(LDA)和支持向量机(SVM),支持向量机(SVM)算法具有更为完全的理论基础,且具有在短时间训练后达到实时性需求的特点,能够适应不同的环境,在相似分类领域中具有明显的优势,所以本发明采用支持向量机(SVM)算法对特征向量进行模型训练,使用训练好的支持向量机(SVM)算法模型对肌电信号进行识别判断,实现对采集到的肌电信号的分类识别,得到基于患者患侧肌电信号的运动意愿。使用者针对三个动作进行样本采集,每个动作分别做10组,每组15次,一共450个样本,其中360个作为样本训练,90个作为样本测试。支持向量机(SVM)算法中的参数设置如下:
肌电信号所对应的三个时域及两个频域特征组成的特征向量,所以n=5。
X=[x
对于输出Y与输出期望E,根据所需要的动作数,将动作分为3类,所以取p
Y=ii=1,2,…,p
E=jj=1,2,…,p
那么,SVM的线性核函数设定为:
k(X,Y)= 而后基于支持向量机(SVM)算法构建决策二叉树的分类模型,对肌电信号分类识别。与其他算法模型相比,决策二叉树具有识别率较高、识别速度快、训练时间短等特点,在实际分类中表现优良,虽然目前只有三类动作,但随着动作类型的增加,基于支持向量机(SVM)算法构建决策二叉树的分类模型的优势将更加突出。 步骤6:对于惯性信号的采集和处理 步骤6.1:镜像康复功能基于惯性信号的采集和处理,而信号的获取取决于佩戴在患者健侧的三个惯性信号采集模块,分别固定在靠近肩部、肘部和手腕处位置,惯性信号采集模块中的惯性传感器所采集到的加速度及陀螺仪信号为惯性信号,惯性信号通过惯性传感器自带的数字运动处理器整合,并通过无线传输模块发送到计算机应用程序中的镜像信号处理模块,利用四元数法对传感器的姿态问题进行求解,得到空间角 步骤6.2:由于患者每次使用惯性信号采集模块时佩戴的位置不能确保完全保持一致,所以采用如下校准方法对初始位置进行校准,根据惯性信号采集模块中的惯性传感器x
再利用向量点积得到惯性传感器变动前后的角度变化余弦值:
进而得到角度变化的值α 步骤6.3:基于空间角数据,使用循环神经网络(RNN)算法对患者健侧的姿态动作进行预测。在pytorch中使用nn.RNN类来搭建循环神经网络,根据实际需要设置输入数据的特征数InputSize和隐藏层的特征数HidenSize,其他参数设置为默认即可。与此同时还需要准备训练循环神经网络的数据集,提前让患者佩戴惯性信号采集模块进行连续性手臂动作,得到一系列具有时间序列性质的空间角数据,进而生成所需的数据集。基于得到的数据集对循环神经网络(RNN)算法进行训练,通过多次数据测试得到具有最佳权重的最佳模型,用此最佳模型可以对实时患者健侧实时动作产生的空间角数据进行识别,判断患者健侧运动意愿,同时将运动意愿数据传给计算机的应用程序。 步骤7:基于脑电、肌电及惯性信号的协同控制 根据步骤4中得到识别后的有效脑电类型有三种(Ta 步骤8:对于镜像康复功能,基于步骤6.3得到的循环神经网络(RNN)算法最佳模型,可以判别此时患者健侧的运动姿态;基于此姿态,并依据实时解算出的空间角数据 本发明的有益效果是: 1)现有研究中康复机械臂的康复动作都是在纯机械式的,康复动作的执行流程和状态都是基于辅助康复人员的设定,对于实际使用患者来说缺少针对于自身状况的特殊调节机制,不仅需要有康复师配合,而且很难高效地达到预期的康复效果,甚至会对患者带来二次损伤。本发明基于意识关联康复机器臂的运动意愿提取,进行患者运动意愿的识别,为患者带来更为主观性的康复操作。 2)本发明提出的对于脑电信号、肌电信号的提取、处理、分类识别及融合手段,在不为患者带来伤害的同时,最大限度的感知患者的运动意识,为患者和康复师减轻负担,而且基于数据分析的识别方式也能为患者的全治疗流程产生康复数据档案,不仅可以帮助医生更好地了解患者康复状况,也能为相关医学研究提供数据支撑。 3)本发明中的镜像康复功能,更进一步地提高了患者的自主运动意愿操作性,患者利用健侧的运动带动患侧运动,能够给予患者最大限度的自主性,最大限度规避机械运动带来的二次伤害,同时也能提高患者的积极性,让患者能够踏实安心进行康复运动。 4)本发明是基于康复机械臂,但其中的技术线和方法思路具有一定的通用性和可操作性,例如也可以对腿部进行康复,只需将肌电信号的采集放置腿部,惯性信号的采集放置健侧腿部,而后的分类器模型重新进行更改就可在一定程度上节约开发时间,对康复机械设备的探索和延伸有着十分重要的指导意义。 附图说明 图1是本发明的步骤流程图。 图2是本发明的脑电信号采集的信号采集点分布图。 图3是本发明中涉及到的三个康复动作。 图4是本发明的肌电信号采集的肌肉群分布图。 图5是本发明的惯性信号采集的位置分布图。 图6是本发明中支持向量机的算法结构示意图。 具体实施方式 为使得本发明的发明目的、特征、优点能够更加的明显和易懂,以下参照附图并结合具体实施方式来进一步描述本发明,以令本领域技术人员参照说明书文字能够据以实施,本发明保护范围并不受限于该具体实施方式。 如图1所示,意识关联康复机器臂运动意愿提取及协同控制方法,具体包括以下步骤: 步骤1:配置脑电信号采集模块 采用非植入式的干电极脑电采集电极帽进行脑电信号采集。所述的干电极脑电采集电极帽具有24个采集通道,各个采集点的位置如图2所示,采用全通道采集形式对脑电信号进行采集,采样精度为24bit,采样频率为250Hz。 步骤2:配置肌电信号采集模块 采用无损采集即将电极贴粘在患者上肢表皮的肌电信号采集方式。以康复医学理论为依据,选取主要的康复动作为标准动作,包括肩关节的屈伸、收展,肘关节的屈伸共三个主要动作,如图3所示。由于上肢的运动不是单个肌肉收缩产生的,而是肌群联合收缩作用产生的,所以要确定人体执行康复动作的主要肌群,结合相关临床研究,如图4所示,将四个电极贴分别粘在患侧的三角肌中部、肱二头肌、肱三头肌和肱桡肌处。 步骤3:配置惯性信号采集模块 采用具有三轴陀螺仪、三轴加速度计和三轴磁力计的惯性传感器为惯性信号采集模块的核心。为了实现镜像康复功能,获得患者健侧的运动数据,本发明中将三个惯性信号采集模块利用扎带分别固定到患者健侧的手腕、手肘近小臂端和大臂近肩端,如图5所示。 步骤4:对于脑电信号的采集和处理 步骤4.1:脑电信号预处理 (1)利用均值法对数据进行基线校正,使用动态脑电信号减去所对应通道前400ms的数据均值,得到校正后的信号值。 (2)利用具有良好平滑性能的巴特沃斯滤波器对信号进行滤波处理。构建巴特沃斯滤波器最重要的是对滤波器阶数和参数设置,具体设置参数为:阻带最小衰减A (3)对于脑电信号采集过程中的眼电干扰、肌电干扰、抖动等干扰信号,利用二阶盲源分离法对干扰信号进行分离和清除,即经过对信号白化处理、估计协方差阵和混合矩阵、联合矩阵对角化等步骤构造分离算法,实现将混杂信号分离为脑电信号和干扰信号,再将干扰信号置零,进而得到所需纯净的脑电信号。 步骤4.2:脑电信号特征提取 本发明基于共空间模式(CSP)算法设计最佳的空间滤波器,得到不同的脑电信号特征,具体过程如下: (1)构建协方差矩阵。脑电信号矩阵为E,矩阵维数为p*d,其中p为采样通道数,d为采样点数,以E (2)构建白化特征矩阵。C可按照特征值分解为C=UλU (3)主分量分解。对C (4)求投影矩阵。所求最佳的空间滤波器也即投影矩阵为W=B (5)求特征值。此时将脑电信号数据向特征向量上投影,投影矩阵为W=B 步骤4.3:脑电信号分类识别 脑电信号的特征识别采用支持向量机(SVM)算法对脑电信号进行分类识别,由于脑电信号的非平稳性特点,所以其特征具有非线性,SVM分类器模型选用核函数为拉普拉斯核函数: 步骤5:对于肌电信号的采集和处理 步骤5.1:计算机应用程序的肌电信号处理模块对采集到的肌电信号进行预处理,即对信号进行二阶差分滤波,去除背景噪声和工频干扰。 步骤5.2:识别肌电信号的有效活动段,从而获取相关数据进行特征提取。肌电信号活动段检测采用滑动平均法,通过信号阈值来判断动作的起止点,过程如下:预先对患者患侧目标肌肉贴上4个检测电极,形成4通道检测,采样频率设定1500Hz,窗长W=256;然后以步长64对采集到的肌电信号进行滑动平均处理;根据患者肌肉力量的情况选择适当的阈值T,这样能够提高分类识别的准确率,若数据序列中连续10个数据均大于阈值T,则将第一个点作为起点,相应的可以确定有效活动段的止点,进而得到了有效活动段的起止点。 在得到有效活动段后,利用信号的时域和频域特征组成的特征向量,进行活动信号的特征提取。使用到的时域特征包括:过零点数(ZC)、波形长度(WL)及均方根(RMS);使用到的频域特征包括:平均功率(MNP)及中值频率(MDF)。 在得到各种特征值后,面临庞杂的数量区间和量纲,此刻需要归一化处理,简化复杂数据。采用区间缩放法,将特征统一缩放至区间(0,1)中。原始特征用y
步骤5.3:采用有监督的分类算法进行分类识别。本发明采用支持向量机(SVM)算法对特征向量进行模型训练,并使用该模型对肌电信号进行识别判断,实现对采集到的肌电信号的分类识别,得到基于患者患侧肌电信号的运动意愿。使用者针对三个动作进行样本采集,每个动作分别做10组,每组15次,一共450个样本,其中360个作为样本训练,90个作为样本测试。支持向量机(SVM)算法中参数设置如下: 肌电信号所对应的三个时域及两个频域特征组成的特征向量,所以n=5。 X=[x 对于输出Y与输出期望E,根据所需要的动作数,将动作分为3类,所以取p Y=ii=1,2,...,p E=jj=1,2,...,p 那么,SVM的线性核函数设定为: k(X,Y)= 接下来基于支持向量机(SVM)构建决策二叉树的分类模型,对肌电信号分类识别。 步骤6:对于惯性信号的采集和处理 步骤6.1:镜像康复功能基于惯性信号的采集和处理,而信号的获取取决于佩戴在患者健侧的三个惯性信号采集模块,分别固定在靠近肩部、肘部和手腕处位置,惯性信号采集模块中的惯性传感器所采集到的加速度及陀螺仪信号为惯性信号,惯性信号通过惯性传感器自带的数字运动处理器整合,并通过无线传输模块发送到计算机应用程序中的镜像信号处理模块,利用四元数法对传感器的姿态问题进行求解,得到空间角 步骤6.2:由于患者每次使用惯性信号采集模块时佩戴的位置不能确保完全保持一致,所以采用如下校准方法对初始位置进行校准,根据惯性信号采集模块中的惯性传感器x
再利用向量点积得到惯性传感器变动前后的角度变化余弦值:
进而得到角度变化的值α 步骤6.3:基于空间角数据,使用循环神经网络(RNN)算法对患者健侧的姿态动作进行预测。在pytorch中使用nn.RNN类来搭建循环神经网络,本发明中使用了三个惯性信号采集模块,各产生一组空间角 步骤7:基于脑电、肌电及惯性信号的协同控制 根据步骤4中得到识别后的有效脑电类型有三种(Ta 步骤8:对于镜像康复功能,基于步骤6.3得到的循环神经网络(RNN)算法最佳模型,可以判别此时患者健侧的运动姿态;基于此姿态,并依据实时解算出的空间角数据
- 一种基于表面肌电的意识控制运动康复系统及其方法
- 一种基于运动学分析的多臂协同焊接机器人控制方法