一种骨质疏松康复治疗辅助器械及其治疗方法
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及辅助医疗器械技术领域,具体为一种骨质疏松康复治疗辅助器械及其治疗方法。
背景技术
骨质疏松症(osteoporosis)是由于多种原因导致的骨密度和骨质量下降,骨微结构破坏,造成骨脆性增加,从而容易发生骨折的全身性骨病。骨质疏松症分为原发性和继发性二大类。原发性骨质疏松症又分为绝经后骨质疏松症(Ⅰ型)、老年性骨质疏松症(Ⅱ型)和特发性骨质疏松(包括青少年型)三种。绝经后骨质疏松症一般发生在妇女绝经后5~10年内;老年性骨质疏松症一般指老人70岁后发生的骨质疏松;而特发性骨质疏松主要发生在青少年,病因尚不明。
在现有的技术中,对于骨质疏松的治疗方法其中有一点,就是营养补剂和运动锻炼的结合,对于一部分骨质疏松的患者,在进行康复训练的时候,为了提高训练效果,并且防止患者摔倒,通常采用市面上一中常用的行走架,使患者用手扶着行走架,进行一些相关的行走训练,既能防止摔倒,同时也能够提高训练量;
但是发明人在对患者进行康复治疗的时候发现,现有的行走架,虽然结构简单,成本低,但是也导致整体的功能单一,进行辅助治疗时,用同一个设备,不能够使患者进行更多种不同模式的训练,尤其对患者的腿部,导致训练较为单一,而且,这种行走架,对使用空间有一定的要求,需要患者在一定范围内,进行来回的行走训练,导致了设备在使用时,对空间要求,具有一定的局限性。为了解决上述问题,发明人,研发了一种骨质疏松康复治疗辅助器械及其治疗方法。
发明内容
为了解决上述问题,本发明的目的在于提供一种骨质疏松康复治疗辅助器械及其治疗方法。
为实现上述目的,本发明提供如下技术方案:一种骨质疏松康复治疗辅助器械,包括用于帮助患者行走的行走架,所述行走架包括底座和扶手架,所述底座和扶手架均呈U形槽状,且底座和扶手架之间设有相连接的支撑杆,所述底座上端设有对称分布且呈环形的输送条,所述输送条之间设有多个相连接的行走板,且输送条内均设有用于带动输送条形状变化的调节机构,所述调节机构包括第一调节轮、第二调节轮和第三调节轮,所述第一调节轮、第二调节轮和第三调节轮将输送条呈张紧状,所述第一调节轮可转动的设置在底座上,所述第二调节轮设置在第一调节轮一侧,且第二调节轮可来回运动的朝着底座槽口处运动,所述第三调节轮可上下运动的设置在第一调节轮上方,所述底座底部还设有用于移动的行走轮。
优选的,所述底座的槽口两侧内壁上均设有隐藏槽,所述隐藏槽一端内部设有转动连接的第一调节轴,所述第一调节轮与第一调节轴固定连接,两个所述第一调节轮之间设有相连接的连接杆,所述底座内设有用于带动第一调节轮转动的驱动电机。
优选的,所述底座上设有固定连接的调节板,所述调节板内侧设有滑槽,所述滑槽内设有滑动连接且可上下运动的滑块,所述滑块上设有固定连接的第三调节轴,所述第三调节轴与第三调节轮转动连接。
优选的,所述底座上设有对称分布的调节槽,所述调节槽内设有可来回滑动的调节块,所述调节块上设有固定连接的第二调节轴,所述第二调节轴与第二调节轮转动连接。所述调节槽内设有固定连接的第二液压杆,所述第二液压杆延伸端与调节块固定连接,所述调节槽位于调节板与隐藏槽之间。
优选的,所述支撑杆为两个,且支撑杆固定设置在底座的两个拐角处,所述支撑杆之间设有可上下运动的休息板,所述休息板底部的两端设有对称分布的限位轴,所述支撑杆侧壁上设有用于限位轴滑动的限位槽,所述支撑杆外侧设有固定连接且用于休息板旋转呈水平状时支撑的支撑块,所述限位槽两侧设有用于防止休息板在水平方向摇摆的限位块。
优选的,所述行走板为多个,且行走板在输送条上均匀间隔分布,所述行走板同一端设有固定连接的连接轴,所述连接轴与相应的输送条之间转动连接,所述行走板另一端均设有转动连接且可弯折呈三角形的支撑板,所述支撑板的延伸端两侧均设有可伸缩的定位轴,所述输送条上均设有用于定位轴卡合固定的定位孔,所述输送条外侧设有用于行走板和支撑板侧边进行支撑的凸起。
优选的,所述支撑板的两侧设有对称分布的定位槽,所述定位轴滑动连接在定位槽,所述定位槽内设有固定连接的第一弹簧,所述第一弹簧延伸端与定位轴固定连接,所述定位轴延伸端的底部呈弧形。
优选的,所述定位孔内设有滑动连接的联动杆,所述输送条外侧设有与定位孔相连通的连通孔,所述连通孔内设有滑动连接的挤压杆,所述挤压杆底部与联动杆端部之间设有转动连接且用于传动的联动轴,位于输送条外侧的所述挤压杆端部呈半球形。
优选的,还包括用于带动支撑板自动弯折的折弯机构,所述折弯机构包括定位块、折弯盘、折弯杆和传动杆,所述输送条上设有固定连接且用于行走板旋转固定角度后进行限位的定位块,所述隐藏槽侧壁上设有弯折槽,所述弯折槽内设有固定连接的第四液压杆,所述第四液压杆延伸端与折弯盘连接,且第四液压杆与弯折盘之间设有相连接且用于带动弯折盘自动旋转至初始位置的扭力弹簧,所述弯折杆和传动杆均固定安装在弯折盘上,所述传动杆用于行走板接触后带动弯折杆朝着支撑板旋转,所述弯折杆用于挤压支撑板朝着输送条弯折运动。
一种骨质疏松康复治疗辅助器械的治疗方法,包括以下步骤:
(1)当患者进行康复治疗的时候,患者可以根据自身的情况,选择不同的模式进行不同模式的康复训练;
(2)行走训练:患者可以手扶着扶手架,使整个身体位于扶手架和底座包裹的范围内,然后用手支撑着扶手架,通过行走轮使整体移动,而患者可以在底座内进行行走训练,扶手架能够有效的进行支撑,防止患者摔倒;
(3)原地行走训练:患者可以使第二调节轮朝着底座槽口运动,并且使第一调节轮向下运动,使第一调节轮和第二调节轮呈平齐状,此时,输送条和行走板能够形成一个类似的跑步机,患者可以手扶着扶手架,将脚跨上行走板上,然后通过启动驱动电机,即可使患者在设备上进行进行原地行走训练;
(4)登山训练:患者可以使第三调节轮向上运动,并使第二调节轮稍微朝着底座中部运动,使输送条形成一个三角形,然后将行走板和支撑板旋转,并使支撑板弯折,使行走板、支撑板和输送条形状一个三角形,使行走板能够形成一个“登山”用的脚踏,并且第二调节轮和第三调节轮上的输送条形成一个斜坡,使整体形成一个类似登山机,患者可以手扶着扶手架,保持稳定,然后通过脚踩行走板向上攀登的方式,模拟登山,从而使患者能够得到更好的锻炼。
与现有技术相比,本发明的有益效果如下:
第一调节轮、第二调节轮和第三调节轮的设计,能够通过控制第二调节轮和第三调节轮的运动,使行走板能够根据不同的情况转化不同的形态,当需要进行原地行走训练的时候,只需要将第二调节轮和第三调节轮控制为相平齐状的时候,即可使行走板能够形成一个跑步机,患者可以在行走板上进行原地行走训练,而不需要进行原地行走训练的时候,至需要将第三调节轮运动至最高处,将第二调节轮运动至第一调节轮上方,即可使整体实现了自动回收,有效的减少了行走板在不使用时的空间占用,而且患者还可以通过扶手架和底座进行行走训练,通过推动扶手架,带动整体进行运动,既便于整体的搬运,同时也能够使患者推着设备进行移动和行走训练。
参照后文的说明和附图,详细公开了本发明的特定实施方式,指明了本发明的原理可以被采用的方式。应该理解,本发明的实施方式在范围上并不因而受到限制。
针对一种实施方式描述和/或示出的特征可以以相同或类似的方式在一个或更多个其它实施方式中使用,与其它实施方式中的特征相组合,或替代其它实施方式中的特征。
应该强调,术语“包括/包含”在本文使用时指特征、整件、步骤或组件的存在,但并不排除一个或更多个其它特征、整件、步骤或组件的存在或附加。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本发明的休息板在使用时立体结构示意图;
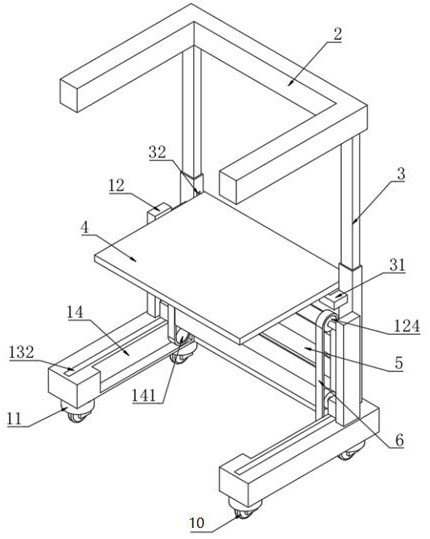
图2为本发明的行走训练时立体结构示意图;
图3为本发明的原地行走训练时立体结构示意图;
图4为本发明的登山训练时立体结构示意图;
图5为本发明的登山训练时剖面结构示意图;
图6为本发明的图5中A处放大图;
图7为本发明的脚踏形成后行走板和支撑板剖面结构示意图;
图8为本发明的定位轴和定位孔连接后剖面结构示意图;
图9为本发明的行走轮和伸缩环剖面结构示意图。
图中:1、底座;10、行走轮;11、伸缩环;111、第五液压杆;12、调节板;121、滑块;122、滑槽;123、第三调节轴;124、第三调节轮;125、第三液压杆;13、调节块;131、第二调节轮;132、调节槽;14、隐藏槽;141、第一调节轮;142、连接杆;143、弯折槽;144、弯折盘;145、第四液压杆;146、弯折杆;147、传动杆;2、扶手架;3、支撑杆;31、支撑块;32、限位槽;33、限位块;4、休息板;41、限位轴;5、行走板;51、支撑板;511、定位槽;512、第一弹簧;513、定位轴;52、支撑轴;53、连接轴;6、输送条;61、凸起块;611、第二弹簧;612、弹出板;62、定位块;63、挤压杆;64、连通孔;65、定位孔;66、联动轴;67、联动杆。
具体实施方式
为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
需要说明的是,当元件被称为“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的另一个元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中另一个元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
实施例1
参照图1-3,一种骨质疏松康复治疗辅助器械,包括用于帮助患者行走的行走架,行走架包括底座1和扶手架2,底座1和扶手架2均呈U形槽状,且底座1和扶手架2之间设有相连接的支撑杆3,底座1上端设有对称分布且呈环形的输送条6,输送条6之间设有多个相连接的行走板5,且输送条6内均设有用于带动输送条6形状变化的调节机构,调节机构包括第一调节轮141、第二调节轮131和第三调节轮124,第一调节轮141、第二调节轮131和第三调节轮124将输送条6呈张紧状,第一调节轮141可转动的设置在底座1上,第二调节轮131设置在第一调节轮141一侧,且第二调节轮131可来回运动的朝着底座1槽口处运动,第三调节轮124可上下运动的设置在第一调节轮141上方,底座1底部还设有用于移动的行走轮10。
第一调节轮141、第二调节轮131和第三调节轮124的设计,能够通过控制第二调节轮131和第三调节轮124的运动,使行走板5能够根据不同的情况转化不同的形态,当需要进行原地行走训练的时候,只需要将第二调节轮131和第三调节轮124控制为相平齐状的时候,即可使行走板5能够形成一个跑步机,患者可以在行走板5上进行原地行走训练,而不需要进行原地行走训练的时候,至需要将第三调节轮124运动至最高处,将第二调节轮131运动至第一调节轮141上方,即可使整体实现了自动回收,有效的减少了行走板5在不使用时的空间占用,而且患者还可以通过扶手架2和底座1进行行走训练,通过推动扶手架2,带动整体进行运动,既便于整体的搬运,同时也能够使患者推着设备进行移动和行走训练。
也可以控制第三调节轮124和第二调节轮131的位置,使输送条6的上表面能够形成同步角度的斜坡,从而能够根据不同的情况提高原地行走训练的强度,从而提高整体的效果。
在本实施例中,参照图1-3,底座1的槽口两侧内壁上均设有隐藏槽14,隐藏槽14一端内部设有转动连接的第一调节轴,第一调节轮141与第一调节轴固定连接,两个第一调节轮141之间设有相连接的连接杆142,底座1内设有用于带动第一调节轮141转动的驱动电机。隐藏槽14的设计,能够使第一调节轮141能够隐藏至底座1内,这样能够更好的实现了输送条6形态的转变。
在本实施例中,参照图1-3,底座1上设有固定连接的调节板12,调节板12内侧设有滑槽122,滑槽122内设有滑动连接且可上下运动的滑块121,滑块121上设有固定连接的第三调节轴123,第三调节轴123与第三调节轮124转动连接。其中滑槽122内设有第三液压杆125,第三液压杆125延伸端与滑块121固定连接。滑块121、第三调节轴123和第三液压杆125的设计,能够实现了对第三调节轮124上下运动的调节。
在本实施例中,底座1上设有对称分布的调节槽132,调节槽132内设有可来回滑动的调节块13,调节块13上设有固定连接的第二调节轴,第二调节轴与第二调节轮131转动连接。调节槽132内设有固定连接的第二液压杆,第二液压杆延伸端与调节块13固定连接,调节槽132位于调节板12与隐藏槽14之间。第二液压杆能够通过带动调节块13的来回运动,实现了对第二调节轮131在底座1上的来回运动。
在本实施例中,参照图1-3和图5,支撑杆3为两个,且支撑杆3固定设置在底座1的两个拐角处,支撑杆3之间设有可上下运动的休息板4,休息板4底部的两端设有对称分布的限位轴41,支撑杆3侧壁上设有用于限位轴41滑动的限位槽32,支撑杆3外侧设有固定连接且用于休息板4旋转呈水平状时支撑的支撑块31,限位槽32两侧设有用于防止休息板4在水平方向摇摆的限位块33。休息板4的设计,能够将休息板4隐藏在支撑杆3之间,在不使用的时候,能够隐藏,而在需要的时候,可以通过将休息板4向下运动,使限位轴41运动至限位槽32的上端部,然后使休息板4绕着限位轴41选,并使休息板4抵靠在支撑块31底部,此时,休息板4能够形成一个能够让患者休息的座椅,便于患者在运动累了,能够及时的更方便的进行休息。
在本实施例中,支撑杆3上端设有固定连接的第一液压杆,第一液压杆上端与相应的扶手架2固定连接。第一液压杆的设计,能够根据不同的情况,调节扶手架2的高度,从而使设备能够适应各种不同的患者的。
在本实施例中,参照图9,所述行走轮10外侧设有可伸缩的伸缩环11,伸缩环11内设有用于带动伸缩环11上下运动的第五液压杆111。伸缩环11的设计,能够利用伸缩环11使第五液压杆111在伸长使行走轮10与地面分离后,伸缩环11能够有效的提高了接触面积,从而提高了该设备整体在进行原地训练的稳定性,并且伸缩环11的可伸缩,能够使该设备在进行移动的时候,依旧可以通过伸缩环11的伸缩,使行走轮10与地面接触,从而使该设备能够更好的移动,具有良好的移动性能。
在本实施例中,底座1内还设有用于驱动电机供电的蓄电池,以及控制电机和各种液压杆运动的控制面板,蓄电池的加入,能够使该设备更灵活,能够随时根据不同的情况,进行转化,当然也可以采用外接电源式;当不需要进行原地训练的时候,可以将电源线拔除,进行移动行走训练,这样能够减少该设备整体的重量,降低成本,控制面板,能够使用户能够更好的进行模式的转化。
实施例2
与实施例1相同之处不在描述,与实施例1不同之处在于:
在本实施例中,请参阅4-8,行走板5为多个,且行走板5在输送条6上均匀间隔分布,行走板5同一端设有固定连接的连接轴53,连接轴53与相应的输送条6之间转动连接,行走板5另一端均设有转动连接且可弯折呈三角形的支撑板51,支撑板51的延伸端两侧均设有可伸缩的定位轴513,输送条6上均设有用于定位轴513卡合固定的定位孔65,输送条6外侧设有用于行走板5和支撑板51侧边进行支撑的凸起块61。其中,行走板5与支撑板51之间通过支撑轴52转动连接。
行走板5、支撑板51的设计以及凸起块61的结合,使输送条6和行走板5在进行行走训练的时候,凸起块61能够对行走板5、支撑板51侧边进行有效的支撑,保证了该设备在进行行走训练的稳定性,能够使输送条6形成的上平面始终是一个平整的平面,不影响用户进行原地行走训练,而间隔分布的行走板5与旋转的支撑板51相结合,同时配合第二调节轮131和第三调节轮124位置的变化,使第二调节轮131和第三调节轮124形成一个一定坡度的斜面,然后将每个行走板5旋转,并使支撑板51弯折,这样,能够使每个行走板5都能够形成一个脚踏,而支撑板51弯折后,通过定位轴513与输送条6连接,能够对行走板5进行有效的支撑,保证行走板5作为脚踏使用时的稳定性,此时,通过输送条6的转动带动行走板5(即脚踏)的周期性转动,形成一个类似登山机的设备,患者即可以通过踩着行走板5,并手扶着扶手架2,进行登山的训练,能够在原地,对患者的腿部进行充分的锻炼,并且扶手架2能够让患者进行有效的支撑,患者运动的压力,保证运动的稳定性,这样的设计,能够使第二调节轮131、第三调节轮124的位置变化,以及行走板5和支撑板51的形状改变,能够实现变形,形成各种不同种类的训练器材,使患者能够利用同一个器械,根据不同的情况,进行各种不同种类的训练,从而能够更好的对骨质疏松病症,进行辅助治疗。
在本实施例中,请参阅8,支撑板51的两侧设有对称分布的定位槽511,定位轴513滑动连接在定位槽511,定位槽511内设有固定连接的第一弹簧512,第一弹簧512延伸端与定位轴513固定连接,定位轴513延伸端的底部呈弧形。
定位槽511、第一弹簧512和定位轴513端部弧形的设计,这样的设计,能够在支撑板51旋转弯折后,能够使定位轴513端部与输送条6接触的时候,利用接触的挤压力,通过弧形的面产生推力,推动定位轴513自动挤压第一弹簧512,使定位轴513自动收缩至定位槽511内,而当定位轴513运动至定位孔65处的时候,第一弹簧512的弹性释放,能够带动定位轴513自动弹出,从而通过定位轴513将支撑板51与输送条6之间连接,这样,定位轴513、连接轴53和支撑轴52之间,能够形成一个三角形,使行走板5能够形成一个较为稳定的脚踏,保证了患者进行登山训练的稳定性。
在本实施例中,请参阅8,定位孔65内设有滑动连接的联动杆67,输送条6外侧设有与定位孔65相连通的连通孔64,连通孔64内设有滑动连接的挤压杆63,挤压杆63底部与联动杆67端部之间设有转动连接且用于传动的联动轴66,位于输送条6外侧的挤压杆63端部呈半球形。
联动杆67、挤压杆63、联动轴66的设计,能够使定位轴513插入定位孔65后,能够通过挤压联动杆67,使联动杆67朝着定位孔65内部运动,从而通过联动轴66带动挤压杆63向外运动,使挤压杆63凸出在输送条6外侧,这样的设计,与挤压杆63端部呈半球形的设计,相结合,使用户需要将支撑板51与输送条6分离的时候,只需要通过控制第二调节轮131和第三调节轮124的位置,使输送条6的外侧尽可能的贴近隐藏槽14一端,这样,能够使输送条6仔通过隐藏槽14处的时候,能够利用隐藏槽14对输送条6表面凸起的挤压杆63端部向内进行挤压,从而通过联动轴66带动联动杆67向外运动,使定位轴513自动与定位孔65分离,此时实现了定位轴513与定位孔65的自动分离,然后使支撑板51与输送条6分离即可,即可实现了支撑板51与输送条6的自动分离,这样的设计,能够使该设备进行变形的过程中,更加的方便快捷。
在本实施例中,请参阅8,位于定位孔65下方的凸起块61上设有可上下运动的弹出板612,所述弹出板612与凸起块61之间设有用于带动弹出板612自动向上运动的第二弹簧611。这样的设计,能够在定位轴513与定位孔65卡合之前,对弹出板612进行挤压,而当定位轴513与定位孔65分离后,第二弹簧611的弹性,能够带动弹出板612将支撑板51自动向外运动,使支撑板51能够更快速的与输送条6分离,提高了定位轴513与定位孔65的分离效率。
在本实施例中,请参阅5-7,还包括用于带动支撑板51自动弯折的折弯机构,折弯机构包括定位块62、折弯盘、折弯杆和传动杆147,输送条6上设有固定连接且用于行走板5旋转固定角度后进行限位的定位块62,隐藏槽14侧壁上设有弯折槽143,弯折槽143内设有固定连接的第四液压杆145,第四液压杆145延伸端与折弯盘连接,且第四液压杆145与弯折盘144之间设有相连接且用于带动弯折盘144自动旋转至初始位置的扭力弹簧,弯折杆146和传动杆147均固定安装在弯折盘144上,传动杆147用于行走板5接触后带动弯折杆146朝着支撑板51旋转,弯折杆146用于挤压支撑板51朝着输送条6弯折运动。
定位块62的设计,能够利用定位块62,使行走板5在旋转后,使行走板5只能旋转固定的角度,这样,当行走板5运动至传动杆147处的时候,行走板5与传动杆147接触,由于行走板5无法旋转,因此,只能够挤压传动杆147旋转,从而使弯折盘144克服了扭力弹簧的弹性,实现旋转,此时,行走板5逐渐挤压传动杆147旋转,并从传动杆147上滑过,在滑动的过程中,弯折盘144带动了弯折杆146旋转,使弯折杆146挤压行走板5底部的支撑板51,使支撑板51绕着支撑轴52转动至输送条6上定位孔65处,并使定位轴513与定位孔65自动卡合,从而实现了“脚踏”的自动成型,不需要患者自己进行一一旋转,更加的方便,当弯折后的支撑板51通过弯折盘144后,由于传动杆147失去挤压,加上扭力弹簧的弹性,能够使弯折盘144自动恢复至初始位置,对下一个支撑板51进行自动弯折,实现了多个支撑板51的自动化弯折,使“脚踏”的成型,更加的高效;同时弯折槽143、第四液压杆145的设计,能够使行走板5不需要形变的时候,能够通过第四液压杆145的收缩自动回收隐藏至弯折槽143内,即保证了整体的美观性,同时,也不会影响患者进行其他模式的训练。
实施例3
一种骨质疏松康复治疗辅助器械的治疗方法,包括以下步骤:
(1)当患者进行康复治疗的时候,患者可以根据自身的情况,选择不同的模式进行不同模式的康复训练;
(2)行走训练:患者可以手扶着扶手架2,使整个身体位于扶手架2和底座1包裹的范围内,然后用手支撑着扶手架2,通过行走轮10使整体移动,而患者可以在底座1内进行行走训练,扶手架2能够有效的进行支撑,防止患者摔倒;
(3)原地行走训练:患者可以使第二调节轮131朝着底座1槽口运动,并且使第一调节轮141向下运动,使第一调节轮141和第二调节轮131呈平齐状,此时,输送条6和行走板5能够形成一个类似的跑步机,患者可以手扶着扶手架2,将脚跨上行走板5上,然后通过启动驱动电机,即可使患者在设备上进行进行原地行走训练;
(4)登山训练:患者可以使第三调节轮124向上运动,并使第二调节轮131稍微朝着底座1中部运动,使输送条6形成一个三角形,然后将行走板5和支撑板51旋转,并使支撑板51弯折,使行走板5、支撑板51和输送条6形状一个三角形,使行走板5能够形成一个“登山”用的脚踏,并且第二调节轮131和第三调节轮124上的输送条6形成一个斜坡,使整体形成一个类似登山机,患者可以手扶着扶手架2,保持稳定,然后通过脚踩行走板5向上攀登的方式,模拟登山,从而使患者能够得到更好的锻炼。
其中“脚踏”的自动成型方法包括以下步骤:
当患者想要进行原地登山训练的时候,先通过控制第二调节轮131和第三调节轮124的位置,使朝向患者一面的输送条6能够形成一个斜面,此时启动驱动电机,带动输送条6按顺时针转动,同时启动第四液压杆145,使弯折盘144向外运动至设定位置,此时,当行走板5运动至弯折盘144处的时候,行走板5与传动杆147接触,由于行走板5无法旋转,因此,只能够挤压传动杆147旋转,从而使弯折盘144克服了扭力弹簧的弹性,实现旋转,此时,行走板5逐渐挤压传动杆147旋转,并从传动杆147上滑过,在滑动的过程中,弯折盘144带动了弯折杆146旋转,使弯折杆146挤压行走板5底部的支撑板51,使支撑板51绕着支撑轴52转动至输送条6上定位孔65处,并使定位轴513与定位孔65自动卡合,从而实现了“脚踏”的自动成型,不需要患者自己进行一一旋转,更加的方便,当弯折后的支撑板51通过弯折盘144后,由于传动杆147失去挤压,加上扭力弹簧的弹性,能够使弯折盘144自动恢复至初始位置,对下一个支撑板51进行自动弯折,实现了多个支撑板51的自动化弯折,使“脚踏”的成型。此时患者即可以用手扶着扶手架2,然后脚踩在相应的行走板5上,此时控制驱动电机,逆时针转动,并且使患者能够自己控制驱动电机的转动速度,从而使患者能够适应自己的登山训练频率,更好的进行登山训练。
而当登山训练完成后,患者只需要控制第二调节轮131的位置,使第二调节轮131处的输送条6尽可能的贴合隐藏槽14槽口处,此时,再次启动驱动电机,使输送条6转动,当输送条6上的挤压杆63运动至隐藏槽14槽口处的时候,能够利用挤压力,挤压挤压杆63向输送条6内部运动,从而通过联动轴66带动联动杆67向外运动,使定位轴513自动与定位孔65分离,此时实现了定位轴513与定位孔65的自动分离,当定位轴513与定位孔65分离后,第二弹簧611的弹性,能够带动弹出板612将支撑板51自动向外运动,使支撑板51能够更快速的与输送条6分离,然后使支撑板51与输送条6分离即可,即可实现了支撑板51与输送条6的自动分离;此时,可以根据不同的需求,调节输送条6的形状,从而进行不同模式的转化。
本文引用的任何数字值都包括从下限值到上限值之间以一个单位递增的下值和上值的所有值,在任何下值和任何更高值之间存在至少两个单位的间隔即可。举例来说,如果阐述了一个部件的数量或过程变量(例如温度、压力、时间等)的值是从1到90,优选从20到80,更优选从30到70,则目的是为了说明该说明书中也明确地列举了诸如15到85、22到68、43到51、30到32等值。对于小于1的值,适当地认为一个单位是0.0001、0.001、0.01、0.1。这些仅仅是想要明确表达的示例,可以认为在最低值和最高值之间列举的数值的所有可能组合都是以类似方式在该说明书明确地阐述了的。
除非另有说明,所有范围都包括端点以及端点之间的所有数字。与范围一起使用的“大约”或“近似”适合于该范围的两个端点。因而,“大约20到30”旨在覆盖“大约20到大约30”,至少包括指明的端点。
披露的所有文章和参考资料,包括专利申请和出版物,出于各种目的通过援引结合于此。描述组合的术语“基本由…构成”应该包括所确定的元件、成分、部件或步骤以及实质上没有影响该组合的基本新颖特征的其他元件、成分、部件或步骤。使用术语“包含”或“包括”来描述这里的元件、成分、部件或步骤的组合也想到了基本由这些元件、成分、部件或步骤构成的实施方式。这里通过使用术语“可以”,旨在说明“可以”包括的所描述的任何属性都是可选的。
多个元件、成分、部件或步骤能够由单个集成元件、成分、部件或步骤来提供。另选地,单个集成元件、成分、部件或步骤可以被分成分离的多个元件、成分、部件或步骤。用来描述元件、成分、部件或步骤的公开“一”或“一个”并不说为了排除其他的元件、成分、部件或步骤。
应该理解,以上描述是为了进行图示说明而不是为了进行限制。通过阅读上述描述,在所提供的示例之外的许多实施方式和许多应用对本领域技术人员来说都将是显而易见的。因此,本教导的范围不应该参照上述描述来确定,而是应该参照所附权利要求以及这些权利要求所拥有的等价物的全部范围来确定。出于全面之目的,所有文章和参考包括专利申请和公告的公开都通过参考结合在本文中。在前述权利要求中省略这里公开的主题的任何方面并不是为了放弃该主体内容,也不应该认为发明人没有将该主题考虑为所公开的发明主题的一部分。
- 一种用于神经介入治疗后康复训练的辅助器械
- 一种手功能障碍者用康复治疗辅助器械