一种水下智能建造机器人
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及水下建造技术领域,尤其涉及一种水下智能建造机器人。
背景技术
随着陆地资源紧缺,水下建造的重要性日益凸显。在进行沿海与近海水下桥墩、围填海、海底隧道工程、驱波块、礁石块和海底管道等水下建筑施工及维护时,水下施工作业难度大、安全风险大,施工效率低,特别是需要人工水下的作业,受到水深压力的限制,作业困难,劳动强度大,无法保证水下施工人员的安全。
目前的水下施工的工艺主要为围堰法,需要在施工位置修建围堰,通过止水结构或建筑把周围的水与围堰外面的水隔绝开,之后利用抽水机等设备把围堰内的水抽干,然后进行建造施工,施工完成后拆除围堰,让建筑周围水域恢复原样。此种施工方法需要用到挖掘机、冲击钻、抽水机等大型设备,设备在水中运行时存在困难,整体工程量大,前期辅助工期长,并且随着施工深度的加深,围堰的建造难度也在逐渐增大。水下建造施工困难、施工效率低、安全风险大。目前,没有能够在水下实现3D打印的建造设备,本发明提供的水下建造机器人可以有效解决上述问题。
发明内容
本发明主要解决现有技术的水下建造设备水下建造施工困难、施工效率低、安全风险大等技术问题,提出一种水下智能建造机器人,适用于水下混凝土3D打印的智能建造,为水下作业施工提供安全保障,实现无人作业的智能建造。
本发明提供了一种水下智能建造机器人,包括:机架以及安装在机架上的密封舱、动力机构、3D打印机构;
所述密封舱内设置主控板和与主控板电连接的推进器驱动模块;所述密封舱的前端设置云台摄像头,所述云台摄像头上密封罩设透明半球罩;所述云台摄像头与主控板电连接;
所述动力机构,包括:一个X轴方向推进器、四个Y轴方向推进器和两个Z轴方向推进器;
所述X轴方向推进器置在机架底部,两个Z轴方向推进器设置在机架的两侧;四个Y轴方向推进器设置在机架的两侧前后,且所述Y轴方向推进器位于Z轴方向推进器的上方;
所述X轴方向推进器、Y轴方向推进器和Z轴方向推进器分别与推进器驱动模块电连接;
所述3D打印机构,包括:料仓、泵、防水电机、喷嘴和螺杆;所述料仓、泵分别安装在机架上,所述防水电机安装在喷嘴上;所述料仓的出口与泵的入口连通,所述泵的出口与喷嘴的入口连通;所述喷嘴内设置螺杆,所述螺杆的输入端与防水电机的输出轴连接;所述泵、防水电机与主控板电连接。
优选的,所述机架,包括:主固定板、打印机构安装板、泵体支撑板、料仓支撑件、泵体支撑板连接件和两个舱体连接件;
所述主固定板的前端底面设置打印机构安装板,所述主固定板的后端底面设置泵体支撑板;所述泵体支撑板与主固定板通过泵体支撑板连接件进行连接;
所述泵体支撑板上设置料仓支撑件;
两个舱体连接件设置在主固定板的两端。
优选的,所述密封舱设置在舱体连接件上;
所述3D打印机构设置在打印机构安装板上;
所述料仓设置在料仓支撑件上;
所述泵设置在泵体支撑板上;
所述X轴方向推进器设置在主固定板底面,所述Y轴方向推进器设置在舱体连接件上,所述Z轴方向推进器设置在主固定板上。
优选的,所述机架上设置多个浮力舱。
优选的,所述密封舱内设置支架,所述主控板和推进器驱动模块安装在支架上。
优选的,所述密封舱尾端设置多个穿线螺母;
防水线缆穿过穿线螺母为主控板和推进器驱动模块提供电源,穿线螺母与防水线缆之间的空隙浇灌防水胶。
优选的,所述防水电机上密封罩设电机密封罩。
优选的,所述螺杆的输入端通过联轴器与防水电机的输出轴连接;
所述防水电机安装在喷嘴密封盖上,所述防水电机的输出轴穿过喷嘴密封盖并连接在联轴器上端;
所述喷嘴密封盖安装在喷嘴上,所述喷嘴密封盖与喷嘴内壁接触部分设有橡胶垫和密封圈。
优选的,所述喷嘴的出口设置防水装置。
优选的,所述防水装置,包括:舵机、支撑架和转盘;
所述支撑架安装在喷嘴的出口,所述支撑架开设圆孔通孔,且支撑架内设置转盘;
所述支撑架上设置舵机,所述舵机的输出轴与转盘连接。
本发明提供的一种水下智能建造机器人,与现有技术相比具有以下优点:
1、本发明水下智能建造机器人,动力机构能够提供机器人水下运动的动力,3D打印机构实现水下3D打印,能够完成水下建造作业,降低水下人工作业的危险系数,提高水下建造效率;水下机器人通过有缆方式控制,保证视频信号从云台摄像头采集视频给机器人控制终端,避免出现信号中断,保证水下机器人的正常运转。本发明在海底隧道工程、海底管道工程及水下建筑设施的海洋工程等领域,具有较好应用前景。
2、通过不同角度和方向安装的动力模块,有效的控制水下机器人的移动,实现水泥浆体在XYZ轴三个方向的挤出打印,完成空间造型的建造。推进器桨叶罩对螺旋桨进行保护,避免与水下的垃圾、水草等发生缠绕。
3.主控板、云台摄像头、推进器驱动安装在密封舱内,避免与水接触发生短路。云台摄像头传输水下的实时工况,便于监控机器人的运作,并且摄像头可进行空间任意角度旋转,扩大监测视角和范围。
4、喷嘴入口、泵送管道、泵体和料仓之间均密封连接,保证打印系统不渗水,避免破坏浆料。
附图说明
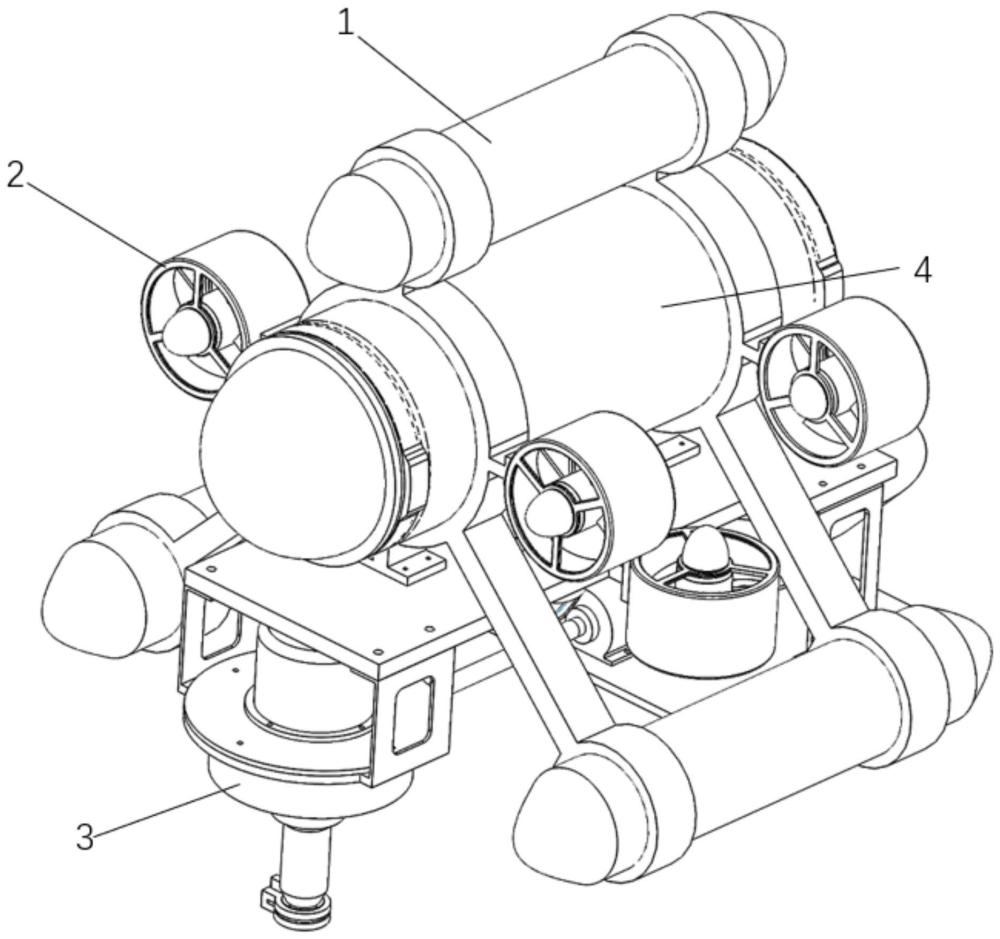
图1为本发明提供的水下智能建造机器人的总体结构示意图;
图2为本发明提供的机架部分的结构示意图;
图3为本发明提供的密封舱的结构示意图;
图4为本发明提供的动力系统的布局示意图;
图5为本发明提供的打印系统的布局示意图;
图6为本发明提供的防水装置的结构示意图。
附图标记中:1-浮力舱,2-动力机构,3-3D打印机构,4-密封舱,5-舱体连接件,6-主固定板,7-打印机构安装板,8-泵体支撑板,9-料仓支撑件,10-泵体支撑板连接件,11-Y轴方向推进器,13-Z轴方向推进器,14-X轴方向推进器,18-电机密封罩,19-防水电机,20-喷嘴密封盖,21-螺杆,22-防水装置,23-喷嘴,24-联轴器,25-泵送管道,26-泵,27-料仓,28-料仓密封盖,29-主控板,30-云台摄像头,31-透明半球罩,32-支架,33-穿线螺母,34-推进器驱动模块,35-舵机,36-支撑架,37-转盘。
具体实施方式
为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部内容。
如图1所示,本发明实施例提供的水下智能建造机器人,包括:机架以及安装在机架上的密封舱4、动力机构2、3D打印机构3。
如图2所示,所述机架,包括:主固定板6、打印机构安装板7、泵体支撑板8、料仓支撑件9、泵体支撑板连接件10和两个舱体连接件5。所述主固定板6的前端底面设置打印机构安装板7,打印机构安装板7通过左右侧板连接在主固定板6上,所述主固定板6的后端底面设置泵体支撑板8;所述泵体支撑板8与主固定板6通过泵体支撑板连接件10进行连接;所述泵体支撑板8上设置料仓支撑件9;两个舱体连接件5设置在主固定板6的两端。
所述机架上设置多个浮力舱1,用于增大和减小浮力。具体的,多个浮力舱1呈三角形布置,浮力舱1具体安装在舱体连接件5上。浮力舱1可以扩大、缩小内置气囊的体积来调整水下机器人的浮力,实现当浆料挤出导致机器人自重减少时及时缩小气囊体积来减小浮力,使水下机器人保持合力为零的状态。
所述密封舱4设置在舱体连接件5上。如图3所示,所述密封舱4内设置主控板29和与主控板29电连接的推进器驱动模块34;所述密封舱4的前端设置云台摄像头30,所述云台摄像头30与主控板29电连接。所述云台摄像头30上密封罩设透明半球罩31;密封舱4前端设置透明半球罩31减少水下阻力,并为云台摄像头30提供保护,避免遮挡云台摄像头30装置摄像,保证画面清晰并且增加密封性,并且透明半球罩31采用螺栓连接挤压橡胶垫和密封舱4实现密封。所述密封舱4内设置支架32,所述主控板29和推进器驱动模块34安装在支架32上。所述密封舱4尾端设置多个穿线螺母33;防水线缆穿过穿线螺母33为主控板29和推进器驱动模块34提供电源,穿线螺母33与防水线缆之间的空隙浇灌防水胶,来进行密封。
如图4所示,所述动力机构2,包括:一个X轴方向推进器14、四个Y轴方向推进器11和两个Z轴方向推进器13。所述X轴方向推进器14设置在机架底部,两个Z轴方向推进器13设置在机架的两侧;四个Y轴方向推进器11设置在机架的两侧前后,且所述Y轴方向推进器11位于Z轴方向推进器13的上方;具体的,所述X轴方向推进器14设置在主固定板6底面,所述Y轴方向推进器11设置在舱体连接件5上,所述Z轴方向推进器13设置在主固定板6上。所述X轴方向推进器14、Y轴方向推进器11和Z轴方向推进器13分别与推进器驱动模块34电连接。各推进器的桨叶外设置桨叶罩,对螺旋桨进行保护,避免与水下的垃圾、水草等发生缠绕。
在本实施例中,两个Z轴方向推进器13轴线位于Z轴方向,用于为机器人的上浮下潜提供动力。四个Y轴方向推进器11轴线位于Y轴方向,用于为机器人的前后移动提供动力。一个X轴方向推进器14轴线位于X轴方向,用于为机器人左右移动提供动力。
所述3D打印机构3设置在打印机构安装板7上。如图5所示,所述3D打印机构3,包括:料仓27、泵26、防水电机19、喷嘴23和螺杆21;所述料仓27、泵26分别安装在机架上,所述料仓27具体设置在料仓支撑件9上。所述料仓27上设置料仓密封盖28。所述泵26具体设置在泵体支撑板8上。所述防水电机19安装在喷嘴23上;所述料仓27的出口与泵26的入口连通,所述泵26的出口与喷嘴23的入口连通,具体的,所述泵26的出口通过泵送管道25与喷嘴23的入口连通。所述喷嘴23内设置螺杆21,所述螺杆21的输入端与防水电机19的输出轴连接;所述泵26、防水电机19与主控板29电连接。
在本实施例中,3D打印机构3实现水泥浆料从料仓27通过泵26送至喷嘴23内,防水电机19带动螺杆21旋转完成水泥浆料的挤出。
所述防水电机19上密封罩设电机密封罩18。电机密封罩18安装在打印机构安装板7上,防止电机渗水,为防水电机19提供保护,避免3D打印系统3短路。所述螺杆21的输入端通过联轴器24与防水电机19的输出轴连接;所述防水电机19安装在喷嘴密封盖20上,所述防水电机19的输出轴穿过喷嘴密封盖20的中心孔并连接在联轴器24上端;所述喷嘴密封盖20安装在喷嘴23上,所述喷嘴密封盖20与喷嘴23内壁接触部分设有橡胶垫和密封圈,用于喷嘴23的上端面的密封。所述喷嘴密封盖20和喷嘴23上端面具体与打印机构安装板7连接。
所述喷嘴23的出口设置防水装置22。防水装置22与喷嘴23出口密封连接,防止喷嘴口在未工作时水渗入喷嘴内。如图6所示,所述防水装置22,包括:舵机35、支撑架36和转盘37;所述支撑架36安装在喷嘴23的出口,所述支撑架36开设圆孔通孔,且支撑架36内设置转盘37;所述支撑架36上设置舵机35,所述舵机35的输出轴与转盘37连接。
本实施例的喷嘴23的出口与防水装置22密封连接,当3D打印系统3未工作时,防水装置22内的转盘37会闭合,使喷嘴23出口堵塞密封,避免水渗入喷嘴23;当3D打印系统3工作时,防水装置22内的舵机35转动带动转盘37转动,喷嘴23出口处于通畅状态,浆料从喷嘴23出口中挤出。
本发明水下智能建造机器人的工作原理:
在使用时,首先浮力舱1调节机器人在水下的浮力,使得机器人在水下的浮力与重力平衡,此时机器人所受合力为零,只需要两个Z轴方向推进器13提供上浮和下潜的动力,来实现机器人的上下运动;四个Y轴方向推进器11为机器人的前后移动提供动力,X轴方向推进器14实现机器人的左右平移;当机器人接到建造指令时,到达指定位置,3D打印系统3开始工作,浆料通过泵26送到喷嘴23内,防水装置22内的转盘37转动,使喷嘴23出口通畅,防水电机19运转带动螺杆21转动将浆料挤出,同时,机器人根据打印路径进行前后左右平移来完成一层浆料的打印,然后机器人上浮一层浆料打印的高度,继续进行同样的操作,逐层打印,层层堆积,最终完成水下建造。当储料不足时将返回陆地储料站进行补给,回到原位继续完成建造任务。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种智能水下搜救机器人
- 一种深水水下智能操作机器人及其控制系统
- 一种智能折翼水下机器人
- 一种方便了解水下视野情况的智能水下机器人
- 一种双智能水下机器人水下航行地形匹配导航方法